M3FD Dataset
\n\n### Preview\n\nThe preview of our dataset is as follows.\n\n---\n\n\n\n \n---\n\n### Details\n\n- **Sensor**: A synchronized system containing one binocular optical camera and one binocular infrared sensor. More\n details are available in the paper.\n\n- **Main scene**:\n - Campus of Dalian University of Technology.\n - State Tourism Holiday Resort at the Golden Stone Beach in Dalian, China.\n - Main roads in Jinzhou District, Dalian, China.\n\n- **Total number of images**:\n - **8400** (for fusion, detection and fused-based detection)\n - **600** (independent scene for fusion)\n\n- **Total number of image pairs**:\n - **4200** (for fusion, detection and fused-based detection)\n - **300** (independent scene for fusion)\n\n\n- **Format of images**: \n - [Infrared] 24-bit grayscale bitmap\n - [Visible] 24-bit color bitmap\n\n- **Image size**: **1024 x 768** pixels (mostly)\n\n- **Registration**: **All image pairs are registered.** The visible images are calibrated by using the internal\n parameters of our synchronized system, and the infrared images are artificially distorted by homography matrix.\n\n- **Labeling**: **34407 labels** have been manually labeled, containing 6 kinds of targets: **{People, Car, Bus,\n Motorcycle, Lamp, Truck}**. (Limited by manpower, some targets may be mismarked or missed. We would appreciate if you\n would point out wrong or missing labels to help us improve the dataset)\n\n### Download\n\n- [Google Drive](https://drive.google.com/drive/folders/1H-oO7bgRuVFYDcMGvxstT1nmy0WF_Y_6?usp=sharing)\n- [Baidu Yun](https://pan.baidu.com/s/1GoJrrl_mn2HNQVDSUdPCrw?pwd=M3FD)\n\n\nIf you have any question or suggestion about the dataset, please email to [Guanyao Wu](mailto:rollingplainko@gmail.com)\nor [Jinyuan Liu](mailto:atlantis918@hotmail.com).\n\nTarDAL Fusion
\n\n### Baselines\n\nIn the experiment process, we used the following **outstanding** work as our baseline.\n\n*Note: Sorted alphabetically*\n\n- [AUIF](https://ieeexplore.ieee.org/document/9416456) (IEEE TCSVT 2021)\n- [DDcGAN](https://github.com/hanna-xu/DDcGAN) (IJCAI 2019)\n- [Densefuse](https://github.com/hli1221/imagefusion_densefuse) (IEEE TIP 2019)\n- [DIDFuse](https://github.com/Zhaozixiang1228/IVIF-DIDFuse) (IJCAI 2020)\n- [FusionGAN](https://github.com/jiayi-ma/FusionGAN) (Information Fusion 2019)\n- [GANMcC](https://github.com/HaoZhang1018/GANMcC) (IEEE TIM 2021)\n- [MFEIF](https://github.com/JinyuanLiu-CV/MFEIF) (IEEE TCSVT 2021)\n- [RFN-Nest](https://github.com/hli1221/imagefusion-rfn-nest) (Information Fusion 2021)\n- [SDNet](https://github.com/HaoZhang1018/SDNet) (IJCV 2021)\n- [U2Fusion](https://github.com/hanna-xu/U2Fusion) (IEEE TPAMI 2020)\n\n### Quick Start\n\nUnder normal circumstances, you may just be curious about the results of the fusion task, so we have prepared an online demonstration.\n\nOur online preview (free) in [Colab](https://colab.research.google.com/github/JinyuanLiu-CV/TarDAL/blob/main/tutorial.ipynb).\n\n### Set Up on Your Own Machine\n\nWhen you want to dive deeper or apply it on a larger scale, you can configure our TarDAL on your computer following the steps below.\n\n#### Virtual Environment\n\nWe strongly recommend that you use Conda as a package manager.\n\n```shell\n# create virtual environment\nconda create -n tardal python=3.10\nconda activate tardal\n# select pytorch version yourself\n# install tardal requirements\npip install -r requirements.txt\n# install yolov5 requirements\npip install -r module/detect/requirements.txt\n```\n\n#### Data Preparation\n\nYou should put the data in the correct place in the following form.\n\n```\nTarDAL ROOT\n├── data\n| ├── m3fd\n| | ├── ir # infrared images\n| | ├── vi # visible images\n| | ├── labels # labels in txt format (yolo format)\n| | └── meta # meta data, includes: pred.txt, train.txt, val.txt\n| ├── tno\n| | ├── ir # infrared images\n| | ├── vi # visible images\n| | └── meta # meta data, includes: pred.txt, train.txt, val.txt\n| ├── roadscene\n| └── ...\n```\n\nYou can directly download the TNO and RoadScene datasets organized in this format from here.\n\n- [Google Drive](https://drive.google.com/drive/folders/1H-oO7bgRuVFYDcMGvxstT1nmy0WF_Y_6?usp=sharing)\n- [Baidu Yun](https://pan.baidu.com/s/1GoJrrl_mn2HNQVDSUdPCrw?pwd=M3FD)\n\n#### Fuse or Eval\n\nIn this section, we will guide you to generate fusion images using our pre-trained model.\n\nAs we mentioned in our paper, we provide three pre-trained models.\n\n| Name | Description |\n|-----------|-----------------------------------------------------------------|\n| TarDAL-DT | Optimized for human vision. (Default) |\n| TarDAL-TT | Optimized for object detection. |\n| TarDAL-CT | Optimal solution for joint human vision and detection accuracy. |\n\nYou can find their corresponding configuration file path in [configs](config/official/infer).\n\nSome settings you should pay attention to:\n\n* config.yaml\n * `strategy`: save images (fuse) or save images & labels (fuse & detect)\n * `dataset`: name & root\n * `inference`: each item in inference\n* infer.py\n * `--cfg`: config file path, such as `configs/official/tardal-dt.yaml`\n * `--save_dir`: result save folder\n\nUnder normal circumstances, you don't need to manually download the model parameters, our program will do it for you.\n\n```shell\n# TarDAL-DT\n# use official tardal-dt infer config and save images to runs/tardal-dt\npython infer.py --cfg configs/official/tardal-dt.yaml --save_dir runs/tardal-dt\n# TarDAL-TT\n# use official tardal-tt infer config and save images to runs/tardal-tt\npython infer.py --cfg configs/official/tardal-tt.yaml --save_dir runs/tardal-tt\n# TarDAL-CT\n# use official tardal-ct infer config and save images to runs/tardal-ct\npython infer.py --cfg configs/official/tardal-ct.yaml --save_dir runs/tardal-ct\n```\n\n#### Train\n\nWe provide some training script for you to train your own model.\n\nPlease note: The training code is only intended to assist in understanding the paper and is not recommended for direct application in\nproduction environments.\n\nUnlike previous code versions, you don't need to preprocess the data, we will automatically calculate the IQA weights and mask.\n\n```shell\n# TarDAL-DT\npython train.py --cfg configs/official/tardal-dt.yaml --auth $YOUR_WANDB_KEY\n# TarDAL-TT\npython train.py --cfg configs/official/tardal-tt.yaml --auth $YOUR_WANDB_KEY\n# TarDAL-CT\npython train.py --cfg configs/official/tardal-ct.yaml --auth $YOUR_WANDB_KEY\n```\n\nIf you want to base your approach on ours and extend it to a production environment, here are some additional suggestions for you.\n\n[Suggestion: A better train process for everyone.](assets/train_process.png)\n\n### Any Question\n\nIf you have any other questions about the code, please email [Zhanbo Huang](mailto:zbhuang917@hotmail.com).\n\nDue to job changes, the previous link `zbhuang@mail.dlut.edu.cn` is no longer available.\n\n## Citation\n\nIf this work has been helpful to you, please feel free to cite our paper!\n\n```\n@inproceedings{liu2022target,\n title={Target-aware Dual Adversarial Learning and a Multi-scenario Multi-Modality Benchmark to Fuse Infrared and Visible for Object Detection},\n author={Liu, Jinyuan and Fan, Xin and Huang, Zhanbo and Wu, Guanyao and Liu, Risheng and Zhong, Wei and Luo, Zhongxuan},\n booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},\n pages={5802--5811},\n year={2022}\n}\n```\n" }, { "path": "assets/sample/s1/meta/pred.txt", "content": "M3FD_00471.png\nROAD_040.jpg\nTNO_028.bmp\n" }, { "path": "config/__init__.py", "content": "class ConfigDict(dict):\n __setattr__ = dict.__setitem__\n __getattr__ = dict.__getitem__\n\n\ndef from_dict(obj) -> ConfigDict:\n if not isinstance(obj, dict):\n return obj\n d = ConfigDict()\n for k, v in obj.items():\n d[k] = from_dict(v)\n return d\n" }, { "path": "config/default.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n log : INFO # log level\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse & detect\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: weights/v1/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: weights/v1/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : M3FD # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/m3fd # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 320, 320 ] # training image size in (h, w)\n batch_size : 16 # batch size used to train\n num_workers : 8 # number of workers used in data loading\n epochs : 300 # number of epochs to train\n eval_interval: 1 # evaluation interval during training\n save_interval: 5 # save interval during training\n freeze : [ ] # freeze layers (e.g. backbone, head, ...)\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 8 # number of workers used in data loading\n use_eval : true # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n save_txt : false # save label file\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v0 # v0: 0.01*ssim + 0.99*l1 | v1: ms-ssim\n src : 1 # src loss gain (v0: 0.8)\n adv : 0 # adv loss gain (v0: 0.2)\n t_adv : 1 # target loss gain (v0: 1)\n d_adv : 1 # detail loss gain (v0: 1)\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 1 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.3 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 0.7 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n warm : 2 # bridge warm up epochs (det -> det, fuse -> fuse)\n\n# optimizer settings:\noptimizer:\n name : sgd # optimizer name\n lr_i : 1.0e-2 # initial learning rate\n lr_f : 1.0e-1 # final learning rate (lr_i * lr_f)\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n lr_d : 1.0e-4 # discriminator learning rate\n\n# scheduler settings:\nscheduler:\n warmup_epochs : [ 2.0, 3.0 ] # start-[0]: bridge warm (keep const), [0]-[1]: normal warm, [1]-end: normal decay\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/exp/i-tardal-dt.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse & detect\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : M3FD # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/m3fd # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 224, 224 ] # training image size in (h, w)\n batch_size : 32 # batch size used to train\n num_workers : 8 # number of workers used in data loading\n epochs : 1000 # number of epochs to train\n eval_interval: 1 # evaluation interval during training\n save_interval: 5 # save interval during training\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 8 # number of workers used in data loading\n use_eval : ~ # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n save_txt : false # save label file\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0 # target loss gain\n d_adv : 0 # detail loss gain\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.5 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 1.0 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n\n# optimizer settings:\noptimizer:\n name : adamw # optimizer name\n lr_i : 1.0e-3 # initial learning rate\n lr_f : 1.0e-3 # final learning rate\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n\n# scheduler settings:\nscheduler:\n warmup_epochs : 3.0 # warmup epochs\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/exp/t-tardal-ct.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse & detect\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : M3FD # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/m3fd # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 320, 320 ] # training image size in (h, w)\n batch_size : 16 # batch size used to train\n num_workers : 8 # number of workers used in data loading\n epochs : 1000 # number of epochs to train\n eval_interval: 1 # evaluation interval during training\n save_interval: 5 # save interval during training\n freeze : [ ] # freeze layers (e.g. backbone, head, ...)\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 8 # number of workers used in data loading\n use_eval : True # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n save_txt : false # save label file\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0 # target loss gain\n d_adv : 0 # detail loss gain\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.5 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 1.0 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n\n# optimizer settings:\noptimizer:\n name : adamw # optimizer name\n lr_i : 1.0e-3 # initial learning rate\n lr_f : 1.0e-3 # final learning rate\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n\n# scheduler settings:\nscheduler:\n warmup_epochs : 3.0 # warmup epochs\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/official/colab.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n log : INFO # log level\n wandb_mode: 'offline' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-ct.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-ct.pth # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : roadscene # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : assets/sample/s1 # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 224, 224 ] # training image size in (h, w)\n batch_size : 32 # batch size used to train\n num_workers : 8 # number of workers used in data loading\n epochs : 1000 # number of epochs to train\n eval_interval: 1 # evaluation interval during training\n save_interval: 5 # save interval during training\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 8 # number of workers used in data loading\n use_eval : ~ # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n save_txt : false # save label file\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0 # target loss gain\n d_adv : 0 # detail loss gain\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.5 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 1.0 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n\n# optimizer settings:\noptimizer:\n name : adamw # optimizer name\n lr_i : 1.0e-3 # initial learning rate\n lr_f : 1.0e-3 # final learning rate\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n\n# scheduler settings:\nscheduler:\n warmup_epochs : 3.0 # warmup epochs\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/official/infer/tardal-ct.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n log : INFO # log level\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-ct.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-ct.pth # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : M3FD # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/m3fd # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 224, 224 ] # training image size in (h, w)\n batch_size : 32 # batch size used to train\n num_workers : 8 # number of workers used in data loading\n epochs : 1000 # number of epochs to train\n eval_interval: 1 # evaluation interval during training\n save_interval: 5 # save interval during training\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 8 # number of workers used in data loading\n use_eval : ~ # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n save_txt : false # save label file\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0 # target loss gain\n d_adv : 0 # detail loss gain\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.5 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 1.0 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n\n# optimizer settings:\noptimizer:\n name : adamw # optimizer name\n lr_i : 1.0e-3 # initial learning rate\n lr_f : 1.0e-3 # final learning rate\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n\n# scheduler settings:\nscheduler:\n warmup_epochs : 3.0 # warmup epochs\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/official/infer/tardal-dt.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n log : INFO # log level\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : M3FD # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/m3fd # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 224, 224 ] # training image size in (h, w)\n batch_size : 32 # batch size used to train\n num_workers : 8 # number of workers used in data loading\n epochs : 1000 # number of epochs to train\n eval_interval: 1 # evaluation interval during training\n save_interval: 5 # save interval during training\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 8 # number of workers used in data loading\n use_eval : ~ # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n save_txt : false # save label file\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0 # target loss gain\n d_adv : 0 # detail loss gain\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.5 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 1.0 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n\n# optimizer settings:\noptimizer:\n name : adamw # optimizer name\n lr_i : 1.0e-3 # initial learning rate\n lr_f : 1.0e-3 # final learning rate\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n\n# scheduler settings:\nscheduler:\n warmup_epochs : 3.0 # warmup epochs\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/official/infer/tardal-tt.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n log : INFO # log level\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-tt.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-tt.pth # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : M3FD # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/m3fd # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 224, 224 ] # training image size in (h, w)\n batch_size : 32 # batch size used to train\n num_workers : 12 # number of workers used in data loading\n epochs : 1000 # number of epochs to train\n eval_interval: 5 # evaluation interval during training\n save_interval: 5 # save interval during training\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 12 # number of workers used in data loading\n use_eval : true # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0.5 # target loss gain\n d_adv : 0.5 # detail loss gain\n det : 1.0 # det loss gain (available only for detect or fuse+detect mode)\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.5 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 1.0 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n\n# optimizer settings:\noptimizer:\n name : adamw # optimizer name\n lr_i : 1.0e-3 # initial learning rate\n lr_f : 1.0e-3 # final learning rate\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n\n# scheduler settings:\nscheduler:\n warmup_epochs : 3.0 # warmup epochs\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/official/train/tardal-ct.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n log : INFO # log level\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse & detect\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: ~ # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : M3FD # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/m3fd # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 320, 320 ] # training image size in (h, w)\n batch_size : 16 # batch size used to train\n num_workers : 8 # number of workers used in data loading\n epochs : 300 # number of epochs to train\n eval_interval: 1 # evaluation interval during training\n save_interval: 5 # save interval during training\n freeze : [ ] # freeze layers (e.g. backbone, head, ...)\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 8 # number of workers used in data loading\n use_eval : true # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n save_txt : false # save label file\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0.5 # target loss gain\n d_adv : 0.5 # detail loss gain\n det : 1.0 # det loss gain (available only for detect or fuse+detect mode)\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.3 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 0.7 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n warm : 2 # bridge warm up epochs (det -> det, fuse -> fuse)\n\n# optimizer settings:\noptimizer:\n name : sgd # optimizer name\n lr_i : 1.0e-2 # initial learning rate\n lr_f : 1.0e-1 # final learning rate (lr_i * lr_f)\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n lr_d : 1.0e-4 # discriminator learning rate\n\n# scheduler settings:\nscheduler:\n warmup_epochs : [ 2.0, 3.0 ] # start-[0]: bridge warm (keep const), [0]-[1]: normal warm, [1]-end: normal decay\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/official/train/tardal-dt.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n log : INFO # log level\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : fuse\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: ~ # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: ~ # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : RoadScene # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/roadscene # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 224, 224 ] # training image size in (h, w)\n batch_size : 32 # batch size used to train\n num_workers : 12 # number of workers used in data loading\n epochs : 1000 # number of epochs to train\n eval_interval: 5 # evaluation interval during training\n save_interval: 5 # save interval during training\n freeze : [ ] # freeze layers (e.g. backbone, head, ...)\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 12 # number of workers used in data loading\n use_eval : true # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0.5 # target loss gain\n d_adv : 0.5 # detail loss gain\n det : 1.0 # det loss gain (available only for detect or fuse+detect mode)\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.5 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 1.0 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n\n# optimizer settings:\noptimizer:\n name : adamw # optimizer name\n lr_i : 1.0e-3 # initial learning rate\n lr_f : 1.0e-3 # final learning rate\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n\n# scheduler settings:\nscheduler:\n warmup_epochs : 3.0 # warmup epochs\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "config/official/train/tardal-tt.yaml", "content": "# base settings\ndevice : cuda # device used for training and evaluation (cpu, cuda, cuda0, cuda1, ...)\nsave_dir : 'cache' # folder used for saving the model, logs results\n\n# debug mode settings\ndebug :\n log : INFO # log level\n wandb_mode: 'online' # wandb connection mode\n fast_run : false # use a small subset of the dataset for debugging code\n\n# framework training strategy:\n# backward method: fuse (direct training DT)\n# backward method: detect (task-oriented training TT)\n# backward method: fuse & detect (cooperative training CT)\nstrategy : detect\n\n# fuse network settings: core of infrared and visible fusion\nfuse :\n dim : 32 # features base dimensions for generator and discriminator\n depth : 3 # depth of dense architecture\n pretrained: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth # ~: disable, path or url: load with pretrained parameters\n\n# detect network settings: available if framework in joint mode (detect, fuse + detect)\ndetect :\n model : yolov5s # yolo model (yolov5 n,s,m,l,x)\n channels : 3 # input channels (3: rgb or 1: grayscale)\n pretrained: ~ # ~: disable, path or url: load with pretrained parameters\n\n# saliency network settings: generating mask for training tardal\nsaliency :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/mask-u2.pth\n\n# iqa settings: information measurement\niqa :\n url: https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/iqa-vgg.pth\n\n# dataset settings:\n# we provide four built-in representative datasets,\n# if you want to use some custom datasets, please refer to the documentation to write yourself or open an issue.\ndataset :\n name : M3FD # dataset folder to be trained with (fuse: TNO, RoadScene; fuse & detect: M3FD, MultiSpectral, etc.)\n root : data/m3fd # dataset root path\n # only available for fuse & detect\n detect:\n hsv : [ 0.015,0.7,0.4 ] # image HSV augmentation (fraction) [developing]\n degrees : 0 # image rotation (+/- degrees) [developing]\n translate : 0.1 # image translation (+/- fraction) [developing]\n scale : 0.9 # image scale (+/- gain) [developing]\n shear : 0.0 # image shear (+/- degrees) [developing]\n perspective: 0.0 # image perspective (+/- fraction), range 0-0.001 [developing]\n flip_ud : 0.0 # image flip up-down (probability)\n flip_lr : 0.5 # image flip left-right (probability)\n\n# train settings:\ntrain :\n image_size : [ 320, 320 ] # training image size in (h, w)\n batch_size : 16 # batch size used to train\n num_workers : 8 # number of workers used in data loading\n epochs : 300 # number of epochs to train\n eval_interval: 1 # evaluation interval during training\n save_interval: 5 # save interval during training\n freeze : [ ] # freeze layers (e.g. backbone, head, ...)\n\n# inference settings:\ninference:\n batch_size : 8 # batch size used to train\n num_workers: 8 # number of workers used in data loading\n use_eval : true # use eval mode in inference mode, default true, false for v0 weights.\n grayscale : false # ignore dataset settings, save as grayscale image\n\n# loss settings:\nloss :\n # fuse loss: src(l1+ssim/ms-ssim) + adv(target+detail) + det\n fuse :\n src_fn: v1 # v0: 1*ssim + 20*l1 | v1: ms-ssim\n src : 0.8 # src loss gain (1 during v0)\n adv : 0.2 # adv loss gain (0.1 during v0)\n t_adv : 0.5 # target loss gain\n d_adv : 0.5 # detail loss gain\n det : 1.0 # det loss gain (available only for detect or fuse+detect mode)\n d_mask: false # use mask for detail discriminator (v0: true)\n d_warm: 10 # discriminator warmup epochs\n # detect loss: box + cls + obj\n detect:\n box : 0.05 # box loss gain\n cls : 0.3 # cls loss gain\n cls_pw : 1.0 # cls BCELoss positive weight\n obj : 0.7 # obj loss gain (scale with pixels)\n obj_pw : 1.0 # obj BCELoss positive weight\n iou_t : 0.20 # IoU training threshold\n anchor_t: 4.0 # anchor-multiple threshold\n fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)\n # bridge\n bridge:\n fuse : 0.5 # fuse loss gain for generator\n detect: 0.5 # detect loss gain for generator\n warm : 2 # bridge warm up epochs (det -> det, fuse -> fuse)\n\n# optimizer settings:\noptimizer:\n name : sgd # optimizer name\n lr_i : 1.0e-2 # initial learning rate\n lr_f : 1.0e-1 # final learning rate (lr_i * lr_f)\n momentum : 0.937 # adam beta1\n weight_decay: 5.0e-4 # decay rate used in optimizer\n lr_d : 1.0e-4 # discriminator learning rate\n\n# scheduler settings:\nscheduler:\n warmup_epochs : [ 2.0, 3.0 ] # start-[0]: bridge warm (keep const), [0]-[1]: normal warm, [1]-end: normal decay\n warmup_momentum: 0.8 # warmup initial momentum\n warmup_bias_lr : 0.1 # warmup initial bias lr\n" }, { "path": "data/README.md", "content": "# Dataset Configure Reference \n\n## Official Supported Datasets\n\n* TNO: fuse\n* RoadScene: fuse\n* MultiSpectral: fuse + detect\n* M3FD: fuse + detect\n\n## Other Datasets\n\nYou can write scripts for your own custom dataset in `loader/{$NAME}.py`, and raise a pull request (optional).\n\n## Prepare\n\nDatasets should have the following structure:\n\n```\ndata\n|__ TNO // name of the dataset\n |__ ir // infrared images\n |__ vi // visible images\n |__ meta // dataset meta information\n |__ train.txt // image name for training\n |__ val.txt // image name for validation\n|__ M3FD // name of the dataset\n |__ ir // infrared images\n |__ vi // visible images\n |__ labels // object labels (ground truth, cxcywh)\n |__ meta // dataset meta information\n |__ train.txt // image name for training\n |__ val.txt // image name for validation\n```\n" }, { "path": "functions/__init__.py", "content": "" }, { "path": "functions/div_loss.py", "content": "import logging\n\nimport torch\nimport torch.autograd as autograd\n\n\ndef div_loss(disc, real_x, fake_x, wp: int = 6, eps: float = 1e-6):\n logging.debug(f'calculating div: real {real_x.mean():.2f}, fake {fake_x.mean():.2f}')\n alpha = torch.rand((real_x.shape[0], 1, 1, 1)).cuda()\n tmp_x = (alpha * real_x + (1 - alpha) * fake_x).requires_grad_(True)\n tmp_y = disc(tmp_x)\n grad = autograd.grad(\n outputs=tmp_y,\n inputs=tmp_x,\n grad_outputs=torch.ones_like(tmp_y),\n create_graph=True,\n retain_graph=True,\n only_inputs=True,\n )[0]\n grad = grad.view(tmp_x.shape[0], -1) + eps\n div = (grad.norm(2, dim=1) ** wp).mean()\n return div\n" }, { "path": "functions/get_param_groups.py", "content": "from typing import List\n\nfrom torch import nn\n\n\ndef get_param_groups(module) -> tuple[List, List, List]:\n group = [], [], []\n bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers\n for v in module.modules():\n if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter):\n \"bias\"\n group[2].append(v.bias)\n if isinstance(v, bn):\n \"weight (no decay)\"\n group[1].append(v.weight)\n elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter):\n \"weight (with decay)\"\n group[0].append(v.weight)\n return group\n" }, { "path": "infer.py", "content": "import argparse\nimport logging\nfrom pathlib import Path\n\nimport torch.backends.cudnn\nimport yaml\n\nimport scripts\nfrom config import from_dict\n\nif __name__ == '__main__':\n # args parser\n parser = argparse.ArgumentParser()\n parser.add_argument('--cfg', default='config/default.yaml', help='config file path')\n parser.add_argument('--save_dir', default='runs/tmp', help='fusion result save folder')\n args = parser.parse_args()\n\n # init config\n config = yaml.safe_load(Path(args.cfg).open('r'))\n config = from_dict(config) # convert dict to object\n config = config\n\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level=config.debug.log, format=log_f)\n\n # init device & anomaly detector\n torch.backends.cudnn.benchmark = True\n torch.autograd.set_detect_anomaly(True)\n\n # choose inference script\n logging.info(f'enter {config.strategy} inference mode')\n match config.strategy:\n case 'fuse':\n infer_p = getattr(scripts, 'InferF')\n # check pretrained weights\n if config.fuse.pretrained is None:\n logging.warning('no pretrained weights specified, use official pretrained weights')\n config.fuse.pretrained = 'https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-dt.pth'\n case 'fuse & detect':\n infer_p = getattr(scripts, 'InferFD')\n # check pretrained weights\n if config.fuse.pretrained is None:\n logging.warning('no pretrained weights specified, use official pretrained weights')\n config.fuse.pretrained = 'https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/tardal-ct.pth'\n case 'detect':\n raise NotImplementedError('detect mode is useless during inference period, please use fuse & detect mode')\n case _:\n raise ValueError(f'unknown strategy: {config.strategy}')\n\n # create script instance\n infer = infer_p(config, args.save_dir)\n infer.run()\n" }, { "path": "loader/__init__.py", "content": "from loader.m3fd import M3FD\nfrom loader.roadscene import RoadScene\nfrom loader.tno import TNO\n\n__all__ = ['TNO', 'RoadScene', 'M3FD']\n" }, { "path": "loader/m3fd.py", "content": "import logging\nimport random\nfrom pathlib import Path\nfrom typing import Literal, List, Optional\n\nimport torch\nfrom kornia.geometry import vflip, hflip, resize\nfrom torch import Tensor, Size\nfrom torch.utils.data import Dataset\nfrom torchvision.ops import box_convert\nfrom torchvision.transforms import Resize\nfrom torchvision.utils import draw_bounding_boxes\n\nfrom config import ConfigDict\nfrom loader.utils.checker import check_mask, check_image, check_labels, check_iqa, get_max_size\nfrom loader.utils.reader import gray_read, ycbcr_read, label_read, img_write, label_write\nfrom tools.scenario_reader import scenario_counter, generate_meta\n\n\nclass M3FD(Dataset):\n type = 'fuse & detect' # dataset type: 'fuse' or 'fuse & detect'\n color = True # dataset visible format: false -> 'gray' or true -> 'color'\n classes = ['People', 'Car', 'Bus', 'Lamp', 'Motorcycle', 'Truck']\n palette = ['#FF0000', '#C1C337', '#2FA7B4', '#F541C4', '#F84F2C', '#7D2CC8']\n\n generate_meta_lock = False # generate meta once\n\n def __init__(self, root: str | Path, mode: Literal['train', 'val', 'pred'], config: ConfigDict):\n super().__init__()\n root = Path(root)\n self.root = root\n self.mode = mode\n self.config = config\n\n # check json meta config\n if M3FD.generate_meta_lock is False:\n if Path(root / 'meta' / 'scenario.json').exists():\n logging.info('found scenario.json, generating train & val list.')\n scenario_counter(root / 'meta' / 'scenario.json')\n generate_meta(root)\n M3FD.generate_meta_lock = True\n else:\n logging.warning('not found scenario.json, using current train & val list.')\n\n # read corresponding list\n img_list = Path(root / 'meta' / f'{mode}.txt').read_text().splitlines()\n logging.info(f'load {len(img_list)} images from {root.name}')\n self.img_list = img_list\n\n # check images\n check_image(root, img_list)\n\n # check labels\n self.labels = check_labels(root, img_list)\n\n # more check\n match mode:\n case 'train' | 'val':\n # check mask cache\n check_mask(root, img_list, config)\n # check iqa cache\n check_iqa(root, img_list, config)\n case _:\n # get max shape\n self.max_size = get_max_size(root, img_list)\n self.transform_fn = Resize(size=self.max_size)\n\n def __len__(self) -> int:\n return len(self.img_list)\n\n def __getitem__(self, index: int) -> dict:\n # choose get item method\n match self.mode:\n case 'train' | 'val':\n return self.train_val_item(index)\n case _:\n return self.pred_item(index)\n\n def train_val_item(self, index: int) -> dict:\n # image name, like '028.png'\n name = self.img_list[index]\n logging.debug(f'train-val mode: loading item {name}')\n\n # load infrared and visible\n ir = gray_read(self.root / 'ir' / name)\n vi, cbcr = ycbcr_read(self.root / 'vi' / name)\n\n # load mask\n mask = gray_read(self.root / 'mask' / name)\n\n # load information measurement\n ir_w = gray_read(self.root / 'iqa' / 'ir' / name)\n vi_w = gray_read(self.root / 'iqa' / 'vi' / name)\n\n # load label\n label_p = Path(name).stem + '.txt'\n labels = label_read(self.root / 'labels' / label_p)\n\n # concat images for transform(s)\n t = torch.cat([ir, vi, mask, ir_w, vi_w, cbcr], dim=0)\n\n # transform (resize)\n resize_fn = Resize(size=self.config.train.image_size)\n t = resize_fn(t)\n\n # transform (flip up-down)\n if random.random() < self.config.dataset.detect.flip_ud:\n t = vflip(t)\n if len(labels):\n labels[:, 2] = 1 - labels[:, 2]\n\n # transform (flip left-right)\n if random.random() < self.config.dataset.detect.flip_lr:\n t = hflip(t)\n if len(labels):\n labels[:, 1] = 1 - labels[:, 1]\n\n # transform labels (cls, x1, y1, x2, y2) -> (0, cls, ...)\n labels_o = torch.zeros((len(labels), 6))\n if len(labels):\n labels_o[:, 1:] = labels\n\n # unpack images\n ir, vi, mask, ir_w, vi_w, cbcr = torch.split(t, [1, 1, 1, 1, 1, 2], dim=0)\n\n # merge data\n sample = {\n 'name': name,\n 'ir': ir, 'vi': vi,\n 'ir_w': ir_w, 'vi_w': vi_w, 'mask': mask, 'cbcr': cbcr,\n 'labels': labels_o\n }\n\n # return as expected\n return sample\n\n def pred_item(self, index: int) -> dict:\n # image name, like '028.png'\n name = self.img_list[index]\n logging.debug(f'pred mode: loading item {name}')\n\n # load infrared and visible\n ir = gray_read(self.root / 'ir' / name)\n vi, cbcr = ycbcr_read(self.root / 'vi' / name)\n\n # transform (resize)\n s = ir.shape[1:]\n t = torch.cat([ir, vi, cbcr], dim=0)\n ir, vi, cbcr = torch.split(self.transform_fn(t), [1, 1, 2], dim=0)\n\n # merge data\n sample = {'name': name, 'ir': ir, 'vi': vi, 'cbcr': cbcr, 'shape': s}\n\n # return as expected\n return sample\n\n @staticmethod\n def pred_save(fus: Tensor, names: List[str | Path], shape: List[Size], pred: Optional[Tensor] = None, save_txt: bool = False):\n if pred is None:\n return M3FD.pred_save_no_boxes(fus, names, shape)\n return M3FD.pred_save_with_boxes(fus, names, shape, pred, save_txt)\n\n @staticmethod\n def pred_save_no_boxes(fus: Tensor, names: List[str | Path], shape: List[Size]):\n for img_t, img_p, img_s in zip(fus, names, shape):\n img_t = resize(img_t, img_s)\n img_write(img_t, img_p)\n\n @staticmethod\n def pred_save_with_boxes(fus: Tensor, names: List[str | Path], shape: List[Size], pred: Tensor, save_txt: bool = False):\n for img_t, img_p, img_s, pred_i in zip(fus, names, shape, pred):\n # reshape target\n cur_s = img_t.shape[1:]\n scale_x, scale_y = cur_s[1] / img_s[1], cur_s[0] / img_s[0]\n pred_i[:, :4] *= Tensor([scale_x, scale_y, scale_x, scale_y]).to(pred_i.device)\n # reshape image\n img_t = resize(img_t, img_s)\n img = (img_t.clamp_(0, 1) * 255).to(torch.uint8)\n # draw bounding box\n pred_x = list(filter(lambda x: x[4] > 0.6, pred_i))\n boxes = [x[:4] for x in pred_x]\n cls_idx = [int(x[5].cpu().numpy()) for x in pred_x]\n labels = [f'{M3FD.classes[cls]}: {x[4].cpu().numpy():.2f}' for cls, x in zip(cls_idx, pred_x)]\n colors = [M3FD.palette[cls] for cls, x in zip(cls_idx, pred_x)]\n if len(boxes):\n img = draw_bounding_boxes(img, torch.stack(boxes, dim=0), labels, colors, width=2)\n img = img.float() / 255\n # save labeled images\n img_p = Path(img_p.parent) / 'images' / img_p.name\n img_write(img, img_p)\n # save label txt\n if save_txt:\n txt_p = Path(str(img_p.parent).replace('images', 'labels')) / (img_p.stem + '.txt')\n txt_p.unlink(missing_ok=True)\n txt_p.touch()\n pred_i[:, :4] /= Tensor([img_s[1], img_s[0], img_s[1], img_s[0]]).to(pred_i.device)\n pred_i[:, :4] = box_convert(pred_i[:, :4], 'xyxy', 'cxcywh')\n label_write(pred_i, txt_p)\n\n @staticmethod\n def collate_fn(data: List[dict]) -> dict:\n # keys\n keys = data[0].keys()\n # merge\n new_data = {}\n for key in keys:\n k_data = [d[key] for d in data]\n match key:\n case 'name' | 'shape':\n # (name, name)\n new_data[key] = k_data\n case 'labels':\n # (labels, image_index)\n for i, lb in enumerate(k_data):\n lb[:, 0] = i\n new_data[key] = torch.cat(k_data, dim=0)\n case _:\n # (img, img)\n new_data[key] = torch.stack(k_data, dim=0)\n # return as expected\n return new_data\n" }, { "path": "loader/roadscene.py", "content": "import logging\nfrom pathlib import Path\nfrom typing import Literal, List\n\nimport torch\nfrom kornia.geometry import resize\nfrom torch import Tensor, Size\nfrom torch.utils.data import Dataset\nfrom torchvision.transforms import Resize\n\nfrom config import ConfigDict\nfrom loader.utils.checker import check_mask, check_image, check_iqa, get_max_size\nfrom loader.utils.reader import gray_read, ycbcr_read, img_write\n\n\nclass RoadScene(Dataset):\n type = 'fuse' # dataset type: 'fuse' or 'fuse & detect'\n color = True # dataset visible format: false -> 'gray' or true -> 'color'\n\n def __init__(self, root: str | Path, mode: Literal['train', 'val', 'pred'], config: ConfigDict):\n super().__init__()\n root = Path(root)\n self.root = root\n self.mode = mode\n\n # read corresponding list\n img_list = Path(root / 'meta' / f'{mode}.txt').read_text().splitlines()\n logging.info(f'load {len(img_list)} images from {root.name}')\n self.img_list = img_list\n\n # check images\n check_image(root, img_list)\n\n # more check\n match mode:\n case 'train' | 'val':\n # check mask cache\n check_mask(root, img_list, config)\n # check iqa cache\n check_iqa(root, img_list, config)\n case _:\n # get max shape\n self.max_size = get_max_size(root, img_list)\n\n # choose transform\n match mode:\n case 'train' | 'val':\n self.transform_fn = Resize(size=config.train.image_size)\n case _:\n self.transform_fn = Resize(size=self.max_size)\n\n def __len__(self) -> int:\n return len(self.img_list)\n\n def __getitem__(self, index: int) -> dict:\n # choose get item method\n match self.mode:\n case 'train' | 'val':\n return self.train_val_item(index)\n case _:\n return self.pred_item(index)\n\n def train_val_item(self, index: int) -> dict:\n # image name, like '003.png'\n name = self.img_list[index]\n logging.debug(f'train-val mode: loading item {name}')\n\n # load infrared and visible\n ir = gray_read(self.root / 'ir' / name)\n vi, cbcr = ycbcr_read(self.root / 'vi' / name)\n\n # load mask\n mask = gray_read(self.root / 'mask' / name)\n\n # load information measurement\n ir_w = gray_read(self.root / 'iqa' / 'ir' / name)\n vi_w = gray_read(self.root / 'iqa' / 'vi' / name)\n\n # transform (resize)\n t = torch.cat([ir, vi, mask, ir_w, vi_w, cbcr], dim=0)\n ir, vi, mask, ir_w, vi_w, cbcr = torch.split(self.transform_fn(t), [1, 1, 1, 1, 1, 2], dim=0)\n\n # merge data\n sample = {'name': name, 'ir': ir, 'vi': vi, 'ir_w': ir_w, 'vi_w': vi_w, 'mask': mask, 'cbcr': cbcr}\n\n # return as expected\n return sample\n\n def pred_item(self, index: int) -> dict:\n # image name, like '003.png'\n name = self.img_list[index]\n logging.debug(f'pred mode: loading item {name}')\n\n # load infrared and visible\n ir = gray_read(self.root / 'ir' / name)\n vi, cbcr = ycbcr_read(self.root / 'vi' / name)\n\n # transform (resize)\n s = ir.shape[1:]\n t = torch.cat([ir, vi, cbcr], dim=0)\n ir, vi, cbcr = torch.split(self.transform_fn(t), [1, 1, 2], dim=0)\n\n # merge data\n sample = {'name': name, 'ir': ir, 'vi': vi, 'cbcr': cbcr, 'shape': s}\n\n # return as expected\n return sample\n\n @staticmethod\n def pred_save(fus: Tensor, names: List[str | Path], shape: List[Size]):\n for img_t, img_p, img_s in zip(fus, names, shape):\n img_t = resize(img_t, img_s)\n img_write(img_t, img_p)\n\n @staticmethod\n def collate_fn(data: List[dict]) -> dict:\n # keys\n keys = data[0].keys()\n # merge\n new_data = {}\n for key in keys:\n k_data = [d[key] for d in data]\n new_data[key] = k_data if isinstance(k_data[0], str) or isinstance(k_data[0], Size) else torch.stack(k_data)\n # return as expected\n return new_data\n" }, { "path": "loader/tno.py", "content": "import logging\nfrom pathlib import Path\nfrom typing import Literal, List\n\nimport torch\nfrom kornia.geometry import resize\nfrom torch import Tensor, Size\nfrom torch.utils.data import Dataset\nfrom torchvision.transforms import Resize\n\nfrom config import ConfigDict\nfrom loader.utils.checker import check_mask, check_image, check_iqa, get_max_size\nfrom loader.utils.reader import gray_read, img_write\n\n\nclass TNO(Dataset):\n type = 'fuse' # dataset type: 'fuse' or 'fuse & detect'\n color = False # dataset visible format: false -> 'gray' or true -> 'color'\n\n def __init__(self, root: str | Path, mode: Literal['train', 'val', 'pred'], config: ConfigDict):\n super().__init__()\n root = Path(root)\n self.root = root\n self.mode = mode\n\n # read corresponding list\n img_list = Path(root / 'meta' / f'{mode}.txt').read_text().splitlines()\n logging.info(f'load {len(img_list)} images from {root.name}')\n self.img_list = img_list\n\n # check images\n check_image(root, img_list)\n\n # more check\n match mode:\n case 'train' | 'val':\n # check mask cache\n check_mask(root, img_list, config)\n # check iqa cache\n check_iqa(root, img_list, config)\n case _:\n # get max shape\n self.max_size = get_max_size(root, img_list)\n\n # choose transform\n match mode:\n case 'train' | 'val':\n self.transform_fn = Resize(size=config.train.image_size)\n case _:\n self.transform_fn = Resize(size=self.max_size)\n\n def __len__(self) -> int:\n return len(self.img_list)\n\n def __getitem__(self, index: int) -> dict:\n # choose get item method\n match self.mode:\n case 'train' | 'val':\n return self.train_val_item(index)\n case _:\n return self.pred_item(index)\n\n def train_val_item(self, index: int) -> dict:\n # image name, like '028.png'\n name = self.img_list[index]\n logging.debug(f'train-val mode: loading item {name}')\n\n # load infrared and visible\n ir = gray_read(self.root / 'ir' / name)\n vi = gray_read(self.root / 'vi' / name)\n\n # load mask\n mask = gray_read(self.root / 'mask' / name)\n\n # load information measurement\n ir_w = gray_read(self.root / 'iqa' / 'ir' / name)\n vi_w = gray_read(self.root / 'iqa' / 'vi' / name)\n\n # transform (resize)\n t = torch.cat([ir, vi, mask, ir_w, vi_w], dim=0)\n ir, vi, mask, ir_w, vi_w = torch.chunk(self.transform_fn(t), chunks=5, dim=0)\n\n # merge data\n sample = {'name': name, 'ir': ir, 'vi': vi, 'ir_w': ir_w, 'vi_w': vi_w, 'mask': mask}\n\n # return as expected\n return sample\n\n def pred_item(self, index: int) -> dict:\n # image name, like '028.png'\n name = self.img_list[index]\n logging.debug(f'pred mode: loading item {name}')\n\n # load infrared and visible\n ir = gray_read(self.root / 'ir' / name)\n vi = gray_read(self.root / 'vi' / name)\n\n # transform (resize)\n s = ir.shape[1:]\n t = torch.cat([ir, vi], dim=0)\n ir, vi = torch.chunk(self.transform_fn(t), chunks=2, dim=0)\n\n # merge data\n sample = {'name': name, 'ir': ir, 'vi': vi, 'shape': s}\n\n # return as expected\n return sample\n\n @staticmethod\n def pred_save(fus: Tensor, names: List[str | Path], shape: List[Size]):\n for img_t, img_p, img_s in zip(fus, names, shape):\n img_t = resize(img_t, img_s)\n img_write(img_t, img_p)\n\n @staticmethod\n def collate_fn(data: List[dict]) -> dict:\n # keys\n keys = data[0].keys()\n # merge\n new_data = {}\n for key in keys:\n k_data = [d[key] for d in data]\n new_data[key] = k_data if isinstance(k_data[0], str) or isinstance(k_data[0], Size) else torch.stack(k_data)\n # return as expected\n return new_data\n" }, { "path": "loader/utils/__init__.py", "content": "" }, { "path": "loader/utils/checker.py", "content": "import logging\nimport sys\nfrom pathlib import Path\nfrom typing import List\n\nfrom torch import Tensor, Size\nfrom tqdm import tqdm\n\nfrom config import ConfigDict\nfrom loader.utils.reader import label_read, gray_read\nfrom pipeline.iqa import IQA\nfrom pipeline.saliency import Saliency\n\n\ndef check_image(root: Path, img_list: List[str]):\n assert (root / 'ir').exists() and (root / 'vi').exists(), f'ir and vi folders are required'\n for img_name in img_list:\n if not (root / 'ir' / img_name).exists() or not (root / 'vi' / img_name).exists():\n logging.fatal(f'empty img {img_name} in {root.name}')\n sys.exit(1)\n logging.info('find all images on list')\n\n\ndef check_iqa(root: Path, img_list: List[str], config: ConfigDict):\n iqa_cache = True\n if (root / 'iqa').exists():\n for img_name in img_list:\n if not (root / 'iqa' / 'ir' / img_name).exists() or not (root / 'iqa' / 'vi' / img_name).exists():\n iqa_cache = False\n break\n else:\n iqa_cache = False\n if iqa_cache:\n logging.info(f'find iqa cache in folder, skip information measurement')\n else:\n logging.info(f'find no iqa cache in folder, start information measurement')\n iqa = IQA(url=config.iqa.url)\n iqa.inference(src=root, dst=root / 'iqa')\n\n\ndef check_labels(root: Path, img_list: List[str]) -> List[Tensor]:\n assert (root / 'labels').exists(), f'labels folder is required'\n labels = []\n for img_name in img_list:\n label_name = Path(img_name).stem + '.txt'\n if not (root / 'labels' / label_name).exists():\n logging.fatal(f'empty label {label_name} in {root.name}')\n sys.exit(1)\n labels.append(label_read(root / 'labels' / label_name))\n logging.info('find all labels on list')\n return labels\n\n\ndef check_mask(root: Path, img_list: List[str], config: ConfigDict):\n mask_cache = True\n if (root / 'mask').exists():\n for img_name in img_list:\n if not (root / 'mask' / img_name).exists():\n mask_cache = False\n break\n else:\n mask_cache = False\n if mask_cache:\n logging.info('find mask cache in folder, skip saliency detection')\n else:\n logging.info('find no mask cache in folder, start saliency detection')\n saliency = Saliency(url=config.saliency.url)\n saliency.inference(src=root / 'ir', dst=root / 'mask')\n\n\ndef get_max_size(root: Path, img_list: List[str]):\n max_h, max_w = -1, -1\n logging.info('find suitable size for prediction')\n img_l = tqdm(img_list)\n for img_name in img_l:\n img_l.set_description('finding suitable size')\n img = gray_read(root / 'ir' / img_name)\n max_h = max(max_h, img.shape[1])\n max_w = max(max_w, img.shape[2])\n logging.info(f'max size in dataset: H:{max_h} x W:{max_w}')\n return Size((max_h, max_w))\n" }, { "path": "loader/utils/reader.py", "content": "from pathlib import Path\nfrom typing import Tuple\n\nimport cv2\nimport numpy\nimport torch\nfrom kornia import image_to_tensor, tensor_to_image\nfrom kornia.color import rgb_to_ycbcr, bgr_to_rgb, rgb_to_bgr\nfrom torch import Tensor\nfrom torchvision.ops import box_convert\n\n\ndef gray_read(img_path: str | Path) -> Tensor:\n img_n = cv2.imread(str(img_path), cv2.IMREAD_GRAYSCALE)\n img_t = image_to_tensor(img_n).float() / 255\n return img_t\n\n\ndef ycbcr_read(img_path: str | Path) -> Tuple[Tensor, Tensor]:\n img_n = cv2.imread(str(img_path), cv2.IMREAD_COLOR)\n img_t = image_to_tensor(img_n).float() / 255\n img_t = rgb_to_ycbcr(bgr_to_rgb(img_t))\n y, cbcr = torch.split(img_t, [1, 2], dim=0)\n return y, cbcr\n\n\ndef label_read(label_path: str | Path) -> Tensor:\n target = numpy.loadtxt(str(label_path), dtype=numpy.float32)\n labels = torch.from_numpy(target).view(-1, 5) # (cls, cx, cy, w, h)\n labels[:, 1:] = box_convert(labels[:, 1:], 'cxcywh', 'xyxy') # (cls, x1, y1, x2, y2)\n return labels\n\n\ndef img_write(img_t: Tensor, img_path: str | Path):\n if img_t.shape[0] == 3:\n img_t = rgb_to_bgr(img_t)\n img_n = tensor_to_image(img_t.squeeze().cpu()) * 255\n cv2.imwrite(str(img_path), img_n)\n\n\ndef label_write(pred_i: Tensor, txt_path: str | Path):\n for *pos, conf, cls in pred_i.tolist():\n line = (cls, *pos, conf)\n with txt_path.open('a') as f:\n f.write(('%g ' * len(line)).rstrip() % line + '\\n')\n" }, { "path": "module/__init__.py", "content": "" }, { "path": "module/detect/README.md", "content": "# Detect\n\nBased on YOLOv5.\n\nReference: [YOLOv5 official](https://github.com/ultralytics/yolov5)\n" }, { "path": "module/detect/models/__init__.py", "content": "" }, { "path": "module/detect/models/common.py", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nCommon modules\n\"\"\"\n\nimport json\nimport os\nimport platform\nimport sys\nimport warnings\nfrom collections import OrderedDict, namedtuple\nfrom copy import copy\nfrom pathlib import Path\n\nimport cv2\nimport math\nimport numpy as np\nimport pandas as pd\nimport requests\nimport torch\nimport torch.nn as nn\nimport yaml\nfrom PIL import Image\nfrom torch.cuda import amp\n\nFILE = Path(__file__).resolve()\nROOT = FILE.parents[1] # YOLOv5 root directory\nif str(ROOT) not in sys.path:\n sys.path.append(str(ROOT)) # add ROOT to PATH\nif platform.system() != 'Windows':\n ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative\n\nfrom utils.dataloaders import exif_transpose, letterbox\nfrom utils.general import (LOGGER, check_requirements, check_suffix, check_version, colorstr, increment_path,\n make_divisible, non_max_suppression, scale_coords, xywh2xyxy, xyxy2xywh)\nfrom utils.plots import Annotator, colors, save_one_box\nfrom utils.torch_utils import copy_attr, time_sync\n\n\ndef autopad(k, p=None): # kernel, padding\n # Pad to 'same'\n if p is None:\n p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad\n return p\n\n\nclass Conv(nn.Module):\n # Standard convolution\n def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups\n super().__init__()\n self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)\n self.bn = nn.BatchNorm2d(c2)\n self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())\n\n def forward(self, x):\n return self.act(self.bn(self.conv(x)))\n\n def forward_fuse(self, x):\n return self.act(self.conv(x))\n\n\nclass DWConv(Conv):\n # Depth-wise convolution class\n def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups\n super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)\n\n\nclass DWConvTranspose2d(nn.ConvTranspose2d):\n # Depth-wise transpose convolution class\n def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0): # ch_in, ch_out, kernel, stride, padding, padding_out\n super().__init__(c1, c2, k, s, p1, p2, groups=math.gcd(c1, c2))\n\n\nclass TransformerLayer(nn.Module):\n # Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)\n def __init__(self, c, num_heads):\n super().__init__()\n self.q = nn.Linear(c, c, bias=False)\n self.k = nn.Linear(c, c, bias=False)\n self.v = nn.Linear(c, c, bias=False)\n self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)\n self.fc1 = nn.Linear(c, c, bias=False)\n self.fc2 = nn.Linear(c, c, bias=False)\n\n def forward(self, x):\n x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x\n x = self.fc2(self.fc1(x)) + x\n return x\n\n\nclass TransformerBlock(nn.Module):\n # Vision Transformer https://arxiv.org/abs/2010.11929\n def __init__(self, c1, c2, num_heads, num_layers):\n super().__init__()\n self.conv = None\n if c1 != c2:\n self.conv = Conv(c1, c2)\n self.linear = nn.Linear(c2, c2) # learnable position embedding\n self.tr = nn.Sequential(*(TransformerLayer(c2, num_heads) for _ in range(num_layers)))\n self.c2 = c2\n\n def forward(self, x):\n if self.conv is not None:\n x = self.conv(x)\n b, _, w, h = x.shape\n p = x.flatten(2).permute(2, 0, 1)\n return self.tr(p + self.linear(p)).permute(1, 2, 0).reshape(b, self.c2, w, h)\n\n\nclass Bottleneck(nn.Module):\n # Standard bottleneck\n def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = Conv(c1, c_, 1, 1)\n self.cv2 = Conv(c_, c2, 3, 1, g=g)\n self.add = shortcut and c1 == c2\n\n def forward(self, x):\n return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))\n\n\nclass BottleneckCSP(nn.Module):\n # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks\n def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = Conv(c1, c_, 1, 1)\n self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)\n self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)\n self.cv4 = Conv(2 * c_, c2, 1, 1)\n self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)\n self.act = nn.SiLU()\n self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))\n\n def forward(self, x):\n y1 = self.cv3(self.m(self.cv1(x)))\n y2 = self.cv2(x)\n return self.cv4(self.act(self.bn(torch.cat((y1, y2), 1))))\n\n\nclass CrossConv(nn.Module):\n # Cross Convolution Downsample\n def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False):\n # ch_in, ch_out, kernel, stride, groups, expansion, shortcut\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = Conv(c1, c_, (1, k), (1, s))\n self.cv2 = Conv(c_, c2, (k, 1), (s, 1), g=g)\n self.add = shortcut and c1 == c2\n\n def forward(self, x):\n return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))\n\n\nclass C3(nn.Module):\n # CSP Bottleneck with 3 convolutions\n def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = Conv(c1, c_, 1, 1)\n self.cv2 = Conv(c1, c_, 1, 1)\n self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)\n self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))\n\n def forward(self, x):\n return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))\n\n\nclass C3x(C3):\n # C3 module with cross-convolutions\n def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):\n super().__init__(c1, c2, n, shortcut, g, e)\n c_ = int(c2 * e)\n self.m = nn.Sequential(*(CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)))\n\n\nclass C3TR(C3):\n # C3 module with TransformerBlock()\n def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):\n super().__init__(c1, c2, n, shortcut, g, e)\n c_ = int(c2 * e)\n self.m = TransformerBlock(c_, c_, 4, n)\n\n\nclass C3SPP(C3):\n # C3 module with SPP()\n def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5):\n super().__init__(c1, c2, n, shortcut, g, e)\n c_ = int(c2 * e)\n self.m = SPP(c_, c_, k)\n\n\nclass C3Ghost(C3):\n # C3 module with GhostBottleneck()\n def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):\n super().__init__(c1, c2, n, shortcut, g, e)\n c_ = int(c2 * e) # hidden channels\n self.m = nn.Sequential(*(GhostBottleneck(c_, c_) for _ in range(n)))\n\n\nclass SPP(nn.Module):\n # Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729\n def __init__(self, c1, c2, k=(5, 9, 13)):\n super().__init__()\n c_ = c1 // 2 # hidden channels\n self.cv1 = Conv(c1, c_, 1, 1)\n self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)\n self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])\n\n def forward(self, x):\n x = self.cv1(x)\n with warnings.catch_warnings():\n warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning\n return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))\n\n\nclass SPPF(nn.Module):\n # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher\n def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))\n super().__init__()\n c_ = c1 // 2 # hidden channels\n self.cv1 = Conv(c1, c_, 1, 1)\n self.cv2 = Conv(c_ * 4, c2, 1, 1)\n self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)\n\n def forward(self, x):\n x = self.cv1(x)\n with warnings.catch_warnings():\n warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning\n y1 = self.m(x)\n y2 = self.m(y1)\n return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1))\n\n\nclass Focus(nn.Module):\n # Focus wh information into c-space\n def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups\n super().__init__()\n self.conv = Conv(c1 * 4, c2, k, s, p, g, act)\n # self.contract = Contract(gain=2)\n\n def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)\n return self.conv(torch.cat((x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]), 1))\n # return self.conv(self.contract(x))\n\n\nclass GhostConv(nn.Module):\n # Ghost Convolution https://github.com/huawei-noah/ghostnet\n def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups\n super().__init__()\n c_ = c2 // 2 # hidden channels\n self.cv1 = Conv(c1, c_, k, s, None, g, act)\n self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)\n\n def forward(self, x):\n y = self.cv1(x)\n return torch.cat((y, self.cv2(y)), 1)\n\n\nclass GhostBottleneck(nn.Module):\n # Ghost Bottleneck https://github.com/huawei-noah/ghostnet\n def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride\n super().__init__()\n c_ = c2 // 2\n self.conv = nn.Sequential(\n GhostConv(c1, c_, 1, 1), # pw\n DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw\n GhostConv(c_, c2, 1, 1, act=False)\n ) # pw-linear\n self.shortcut = nn.Sequential(\n DWConv(c1, c1, k, s, act=False), Conv(\n c1, c2, 1, 1,\n act=False\n )\n ) if s == 2 else nn.Identity()\n\n def forward(self, x):\n return self.conv(x) + self.shortcut(x)\n\n\nclass Contract(nn.Module):\n # Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)\n def __init__(self, gain=2):\n super().__init__()\n self.gain = gain\n\n def forward(self, x):\n b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain'\n s = self.gain\n x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2)\n x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)\n return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)\n\n\nclass Expand(nn.Module):\n # Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)\n def __init__(self, gain=2):\n super().__init__()\n self.gain = gain\n\n def forward(self, x):\n b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'\n s = self.gain\n x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80)\n x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)\n return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)\n\n\nclass Concat(nn.Module):\n # Concatenate a list of tensors along dimension\n def __init__(self, dimension=1):\n super().__init__()\n self.d = dimension\n\n def forward(self, x):\n return torch.cat(x, self.d)\n\n\nclass DetectMultiBackend(nn.Module):\n # YOLOv5 MultiBackend class for python inference on various backends\n def __init__(self, weights='yolov5s.pt', device=torch.device('cpu'), dnn=False, data=None, fp16=False, fuse=True):\n # Usage:\n # PyTorch: weights = *.pt\n # TorchScript: *.torchscript\n # ONNX Runtime: *.onnx\n # ONNX OpenCV DNN: *.onnx with --dnn\n # OpenVINO: *.xml\n # CoreML: *.mlmodel\n # TensorRT: *.engine\n # TensorFlow SavedModel: *_saved_model\n # TensorFlow GraphDef: *.pb\n # TensorFlow Lite: *.tflite\n # TensorFlow Edge TPU: *_edgetpu.tflite\n from models.experimental import attempt_download, attempt_load # scoped to avoid circular import\n\n super().__init__()\n w = str(weights[0] if isinstance(weights, list) else weights)\n pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs = self.model_type(w) # get backend\n w = attempt_download(w) # download if not local\n fp16 &= (pt or jit or onnx or engine) and device.type != 'cpu' # FP16\n stride, names = 32, [f'class{i}' for i in range(1000)] # assign defaults\n if data: # assign class names (optional)\n with open(data, errors='ignore') as f:\n names = yaml.safe_load(f)['names']\n\n if pt: # PyTorch\n model = attempt_load(weights if isinstance(weights, list) else w, device=device, inplace=True, fuse=fuse)\n stride = max(int(model.stride.max()), 32) # model stride\n names = model.module.names if hasattr(model, 'module') else model.names # get class names\n model.half() if fp16 else model.float()\n self.model = model # explicitly assign for to(), cpu(), cuda(), half()\n elif jit: # TorchScript\n LOGGER.info(f'Loading {w} for TorchScript inference...')\n extra_files = {'config.txt': ''} # model metadata\n model = torch.jit.load(w, _extra_files=extra_files)\n model.half() if fp16 else model.float()\n if extra_files['config.txt']:\n d = json.loads(extra_files['config.txt']) # extra_files dict\n stride, names = int(d['stride']), d['names']\n elif dnn: # ONNX OpenCV DNN\n LOGGER.info(f'Loading {w} for ONNX OpenCV DNN inference...')\n check_requirements(('opencv-python>=4.5.4',))\n net = cv2.dnn.readNetFromONNX(w)\n elif onnx: # ONNX Runtime\n LOGGER.info(f'Loading {w} for ONNX Runtime inference...')\n cuda = torch.cuda.is_available()\n check_requirements(('onnx', 'onnxruntime-gpu' if cuda else 'onnxruntime'))\n import onnxruntime\n providers = ['CUDAExecutionProvider', 'CPUExecutionProvider'] if cuda else ['CPUExecutionProvider']\n session = onnxruntime.InferenceSession(w, providers=providers)\n meta = session.get_modelmeta().custom_metadata_map # metadata\n if 'stride' in meta:\n stride, names = int(meta['stride']), eval(meta['names'])\n elif xml: # OpenVINO\n LOGGER.info(f'Loading {w} for OpenVINO inference...')\n check_requirements(('openvino',)) # requires openvino-dev: https://pypi.org/project/openvino-dev/\n from openvino.runtime import Core, Layout, get_batch\n ie = Core()\n if not Path(w).is_file(): # if not *.xml\n w = next(Path(w).glob('*.xml')) # get *.xml file from *_openvino_model dir\n network = ie.read_model(model=w, weights=Path(w).with_suffix('.bin'))\n if network.get_parameters()[0].get_layout().empty:\n network.get_parameters()[0].set_layout(Layout(\"NCHW\"))\n batch_dim = get_batch(network)\n if batch_dim.is_static:\n batch_size = batch_dim.get_length()\n executable_network = ie.compile_model(network, device_name=\"CPU\") # device_name=\"MYRIAD\" for Intel NCS2\n output_layer = next(iter(executable_network.outputs))\n meta = Path(w).with_suffix('.yaml')\n if meta.exists():\n stride, names = self._load_metadata(meta) # load metadata\n elif engine: # TensorRT\n LOGGER.info(f'Loading {w} for TensorRT inference...')\n import tensorrt as trt # https://developer.nvidia.com/nvidia-tensorrt-download\n check_version(trt.__version__, '7.0.0', hard=True) # require tensorrt>=7.0.0\n Binding = namedtuple('Binding', ('name', 'dtype', 'shape', 'data', 'ptr'))\n logger = trt.Logger(trt.Logger.INFO)\n with open(w, 'rb') as f, trt.Runtime(logger) as runtime:\n model = runtime.deserialize_cuda_engine(f.read())\n bindings = OrderedDict()\n fp16 = False # default updated below\n for index in range(model.num_bindings):\n name = model.get_binding_name(index)\n dtype = trt.nptype(model.get_binding_dtype(index))\n shape = tuple(model.get_binding_shape(index))\n data = torch.from_numpy(np.empty(shape, dtype=np.dtype(dtype))).to(device)\n bindings[name] = Binding(name, dtype, shape, data, int(data.data_ptr()))\n if model.binding_is_input(index) and dtype == np.float16:\n fp16 = True\n binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())\n context = model.create_execution_context()\n batch_size = bindings['images'].shape[0]\n elif coreml: # CoreML\n LOGGER.info(f'Loading {w} for CoreML inference...')\n import coremltools as ct\n model = ct.models.MLModel(w)\n else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)\n if saved_model: # SavedModel\n LOGGER.info(f'Loading {w} for TensorFlow SavedModel inference...')\n import tensorflow as tf\n keras = False # assume TF1 saved_model\n model = tf.keras.models.load_model(w) if keras else tf.saved_model.load(w)\n elif pb: # GraphDef https://www.tensorflow.org/guide/migrate#a_graphpb_or_graphpbtxt\n LOGGER.info(f'Loading {w} for TensorFlow GraphDef inference...')\n import tensorflow as tf\n\n def wrap_frozen_graph(gd, inputs, outputs):\n x = tf.compat.v1.wrap_function(lambda: tf.compat.v1.import_graph_def(gd, name=\"\"), []) # wrapped\n ge = x.graph.as_graph_element\n return x.prune(tf.nest.map_structure(ge, inputs), tf.nest.map_structure(ge, outputs))\n\n gd = tf.Graph().as_graph_def() # graph_def\n with open(w, 'rb') as f:\n gd.ParseFromString(f.read())\n frozen_func = wrap_frozen_graph(gd, inputs=\"x:0\", outputs=\"Identity:0\")\n elif tflite or edgetpu: # https://www.tensorflow.org/lite/guide/python#install_tensorflow_lite_for_python\n try: # https://coral.ai/docs/edgetpu/tflite-python/#update-existing-tf-lite-code-for-the-edge-tpu\n from tflite_runtime.interpreter import Interpreter, load_delegate\n except ImportError:\n import tensorflow as tf\n Interpreter, load_delegate = tf.lite.Interpreter, tf.lite.experimental.load_delegate,\n if edgetpu: # Edge TPU https://coral.ai/software/#edgetpu-runtime\n LOGGER.info(f'Loading {w} for TensorFlow Lite Edge TPU inference...')\n delegate = {\n 'Linux': 'libedgetpu.so.1',\n 'Darwin': 'libedgetpu.1.dylib',\n 'Windows': 'edgetpu.dll'}[platform.system()]\n interpreter = Interpreter(model_path=w, experimental_delegates=[load_delegate(delegate)])\n else: # Lite\n LOGGER.info(f'Loading {w} for TensorFlow Lite inference...')\n interpreter = Interpreter(model_path=w) # load TFLite model\n interpreter.allocate_tensors() # allocate\n input_details = interpreter.get_input_details() # inputs\n output_details = interpreter.get_output_details() # outputs\n elif tfjs:\n raise Exception('ERROR: YOLOv5 TF.js inference is not supported')\n else:\n raise Exception(f'ERROR: {w} is not a supported format')\n self.__dict__.update(locals()) # assign all variables to self\n\n def forward(self, im, augment=False, visualize=False, val=False):\n # YOLOv5 MultiBackend inference\n b, ch, h, w = im.shape # batch, channel, height, width\n if self.fp16 and im.dtype != torch.float16:\n im = im.half() # to FP16\n\n if self.pt: # PyTorch\n y = self.model(im, augment=augment, visualize=visualize)[0]\n elif self.jit: # TorchScript\n y = self.model(im)[0]\n elif self.dnn: # ONNX OpenCV DNN\n im = im.cpu().numpy() # torch to numpy\n self.net.setInput(im)\n y = self.net.forward()\n elif self.onnx: # ONNX Runtime\n im = im.cpu().numpy() # torch to numpy\n y = self.session.run([self.session.get_outputs()[0].name], {self.session.get_inputs()[0].name: im})[0]\n elif self.xml: # OpenVINO\n im = im.cpu().numpy() # FP32\n y = self.executable_network([im])[self.output_layer]\n elif self.engine: # TensorRT\n assert im.shape == self.bindings['images'].shape, (im.shape, self.bindings['images'].shape)\n self.binding_addrs['images'] = int(im.data_ptr())\n self.context.execute_v2(list(self.binding_addrs.values()))\n y = self.bindings['output'].data\n elif self.coreml: # CoreML\n im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)\n im = Image.fromarray((im[0] * 255).astype('uint8'))\n # im = im.resize((192, 320), Image.ANTIALIAS)\n y = self.model.predict({'image': im}) # coordinates are xywh normalized\n if 'confidence' in y:\n box = xywh2xyxy(y['coordinates'] * [[w, h, w, h]]) # xyxy pixels\n conf, cls = y['confidence'].max(1), y['confidence'].argmax(1).astype(np.float)\n y = np.concatenate((box, conf.reshape(-1, 1), cls.reshape(-1, 1)), 1)\n else:\n k = 'var_' + str(sorted(int(k.replace('var_', '')) for k in y)[-1]) # output key\n y = y[k] # output\n else: # TensorFlow (SavedModel, GraphDef, Lite, Edge TPU)\n im = im.permute(0, 2, 3, 1).cpu().numpy() # torch BCHW to numpy BHWC shape(1,320,192,3)\n if self.saved_model: # SavedModel\n y = (self.model(im, training=False) if self.keras else self.model(im)).numpy()\n elif self.pb: # GraphDef\n y = self.frozen_func(x=self.tf.constant(im)).numpy()\n else: # Lite or Edge TPU\n input, output = self.input_details[0], self.output_details[0]\n int8 = input['dtype'] == np.uint8 # is TFLite quantized uint8 model\n if int8:\n scale, zero_point = input['quantization']\n im = (im / scale + zero_point).astype(np.uint8) # de-scale\n self.interpreter.set_tensor(input['index'], im)\n self.interpreter.invoke()\n y = self.interpreter.get_tensor(output['index'])\n if int8:\n scale, zero_point = output['quantization']\n y = (y.astype(np.float32) - zero_point) * scale # re-scale\n y[..., :4] *= [w, h, w, h] # xywh normalized to pixels\n\n if isinstance(y, np.ndarray):\n y = torch.tensor(y, device=self.device)\n return (y, []) if val else y\n\n def warmup(self, imgsz=(1, 3, 640, 640)):\n # Warmup model by running inference once\n warmup_types = self.pt, self.jit, self.onnx, self.engine, self.saved_model, self.pb\n if any(warmup_types) and self.device.type != 'cpu':\n im = torch.zeros(*imgsz, dtype=torch.half if self.fp16 else torch.float, device=self.device) # input\n for _ in range(2 if self.jit else 1): #\n self.forward(im) # warmup\n\n @staticmethod\n def model_type(p='path/to/model.pt'):\n # Return model type from model path, i.e. path='path/to/model.onnx' -> type=onnx\n from export import export_formats\n suffixes = list(export_formats().Suffix) + ['.xml'] # export suffixes\n check_suffix(p, suffixes) # checks\n p = Path(p).name # eliminate trailing separators\n pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs, xml2 = (s in p for s in suffixes)\n xml |= xml2 # *_openvino_model or *.xml\n tflite &= not edgetpu # *.tflite\n return pt, jit, onnx, xml, engine, coreml, saved_model, pb, tflite, edgetpu, tfjs\n\n @staticmethod\n def _load_metadata(f='path/to/meta.yaml'):\n # Load metadata from meta.yaml if it exists\n with open(f, errors='ignore') as f:\n d = yaml.safe_load(f)\n return d['stride'], d['names'] # assign stride, names\n\n\nclass AutoShape(nn.Module):\n # YOLOv5 input-robust model wrapper for passing cv2/np/PIL/torch inputs. Includes preprocessing, inference and NMS\n conf = 0.25 # NMS confidence threshold\n iou = 0.45 # NMS IoU threshold\n agnostic = False # NMS class-agnostic\n multi_label = False # NMS multiple labels per box\n classes = None # (optional list) filter by class, i.e. = [0, 15, 16] for COCO persons, cats and dogs\n max_det = 1000 # maximum number of detections per image\n amp = False # Automatic Mixed Precision (AMP) inference\n\n def __init__(self, model, verbose=True):\n super().__init__()\n if verbose:\n LOGGER.info('Adding AutoShape... ')\n copy_attr(self, model, include=('yaml', 'nc', 'hyp', 'names', 'stride', 'abc'), exclude=()) # copy attributes\n self.dmb = isinstance(model, DetectMultiBackend) # DetectMultiBackend() instance\n self.pt = not self.dmb or model.pt # PyTorch model\n self.model = model.eval()\n\n def _apply(self, fn):\n # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers\n self = super()._apply(fn)\n if self.pt:\n m = self.model.model.model[-1] if self.dmb else self.model.model[-1] # Detect()\n m.stride = fn(m.stride)\n m.grid = list(map(fn, m.grid))\n if isinstance(m.anchor_grid, list):\n m.anchor_grid = list(map(fn, m.anchor_grid))\n return self\n\n @torch.no_grad()\n def forward(self, imgs, size=640, augment=False, profile=False):\n # Inference from various sources. For height=640, width=1280, RGB images example inputs are:\n # file: imgs = 'data/images/zidane.jpg' # str or PosixPath\n # URI: = 'https://ultralytics.com/images/zidane.jpg'\n # OpenCV: = cv2.imread('image.jpg')[:,:,::-1] # HWC BGR to RGB x(640,1280,3)\n # PIL: = Image.open('image.jpg') or ImageGrab.grab() # HWC x(640,1280,3)\n # numpy: = np.zeros((640,1280,3)) # HWC\n # torch: = torch.zeros(16,3,320,640) # BCHW (scaled to size=640, 0-1 values)\n # multiple: = [Image.open('image1.jpg'), Image.open('image2.jpg'), ...] # list of images\n\n t = [time_sync()]\n p = next(self.model.parameters()) if self.pt else torch.zeros(1, device=self.model.device) # for device, type\n autocast = self.amp and (p.device.type != 'cpu') # Automatic Mixed Precision (AMP) inference\n if isinstance(imgs, torch.Tensor): # torch\n with amp.autocast(autocast):\n return self.model(imgs.to(p.device).type_as(p), augment, profile) # inference\n\n # Pre-process\n n, imgs = (len(imgs), list(imgs)) if isinstance(imgs, (list, tuple)) else (1, [imgs]) # number, list of images\n shape0, shape1, files = [], [], [] # image and inference shapes, filenames\n for i, im in enumerate(imgs):\n f = f'image{i}' # filename\n if isinstance(im, (str, Path)): # filename or uri\n im, f = Image.open(requests.get(im, stream=True).raw if str(im).startswith('http') else im), im\n im = np.asarray(exif_transpose(im))\n elif isinstance(im, Image.Image): # PIL Image\n im, f = np.asarray(exif_transpose(im)), getattr(im, 'filename', f) or f\n files.append(Path(f).with_suffix('.jpg').name)\n if im.shape[0] < 5: # image in CHW\n im = im.transpose((1, 2, 0)) # reverse dataloader .transpose(2, 0, 1)\n im = im[..., :3] if im.ndim == 3 else np.tile(im[..., None], 3) # enforce 3ch input\n s = im.shape[:2] # HWC\n shape0.append(s) # image shape\n g = (size / max(s)) # gain\n shape1.append([y * g for y in s])\n imgs[i] = im if im.data.contiguous else np.ascontiguousarray(im) # update\n shape1 = [make_divisible(x, self.stride) if self.pt else size for x in np.array(shape1).max(0)] # inf shape\n x = [letterbox(im, shape1, auto=False)[0] for im in imgs] # pad\n x = np.ascontiguousarray(np.array(x).transpose((0, 3, 1, 2))) # stack and BHWC to BCHW\n x = torch.from_numpy(x).to(p.device).type_as(p) / 255 # uint8 to fp16/32\n t.append(time_sync())\n\n with amp.autocast(autocast):\n # Inference\n y = self.model(x, augment, profile) # forward\n t.append(time_sync())\n\n # Post-process\n y = non_max_suppression(\n y if self.dmb else y[0],\n self.conf,\n self.iou,\n self.classes,\n self.agnostic,\n self.multi_label,\n max_det=self.max_det\n ) # NMS\n for i in range(n):\n scale_coords(shape1, y[i][:, :4], shape0[i])\n\n t.append(time_sync())\n return Detections(imgs, y, files, t, self.names, x.shape)\n\n\nclass Detections:\n # YOLOv5 detections class for inference results\n def __init__(self, imgs, pred, files, times=(0, 0, 0, 0), names=None, shape=None):\n super().__init__()\n d = pred[0].device # device\n gn = [torch.tensor([*(im.shape[i] for i in [1, 0, 1, 0]), 1, 1], device=d) for im in imgs] # normalizations\n self.imgs = imgs # list of images as numpy arrays\n self.pred = pred # list of tensors pred[0] = (xyxy, conf, cls)\n self.names = names # class names\n self.files = files # image filenames\n self.times = times # profiling times\n self.xyxy = pred # xyxy pixels\n self.xywh = [xyxy2xywh(x) for x in pred] # xywh pixels\n self.xyxyn = [x / g for x, g in zip(self.xyxy, gn)] # xyxy normalized\n self.xywhn = [x / g for x, g in zip(self.xywh, gn)] # xywh normalized\n self.n = len(self.pred) # number of images (batch size)\n self.t = tuple((times[i + 1] - times[i]) * 1000 / self.n for i in range(3)) # timestamps (ms)\n self.s = shape # inference BCHW shape\n\n def display(self, pprint=False, show=False, save=False, crop=False, render=False, labels=True, save_dir=Path('')):\n crops = []\n for i, (im, pred) in enumerate(zip(self.imgs, self.pred)):\n s = f'image {i + 1}/{len(self.pred)}: {im.shape[0]}x{im.shape[1]} ' # string\n if pred.shape[0]:\n for c in pred[:, -1].unique():\n n = (pred[:, -1] == c).sum() # detections per class\n s += f\"{n} {self.names[int(c)]}{'s' * (n > 1)}, \" # add to string\n if show or save or render or crop:\n annotator = Annotator(im, example=str(self.names))\n for *box, conf, cls in reversed(pred): # xyxy, confidence, class\n label = f'{self.names[int(cls)]} {conf:.2f}'\n if crop:\n file = save_dir / 'crops' / self.names[int(cls)] / self.files[i] if save else None\n crops.append(\n {\n 'box': box,\n 'conf': conf,\n 'cls': cls,\n 'label': label,\n 'im': save_one_box(box, im, file=file, save=save)}\n )\n else: # all others\n annotator.box_label(box, label if labels else '', color=colors(cls))\n im = annotator.im\n else:\n s += '(no detections)'\n\n im = Image.fromarray(im.astype(np.uint8)) if isinstance(im, np.ndarray) else im # from np\n if pprint:\n print(s.rstrip(', '))\n if show:\n im.show(self.files[i]) # show\n if save:\n f = self.files[i]\n im.save(save_dir / f) # save\n if i == self.n - 1:\n LOGGER.info(f\"Saved {self.n} image{'s' * (self.n > 1)} to {colorstr('bold', save_dir)}\")\n if render:\n self.imgs[i] = np.asarray(im)\n if crop:\n if save:\n LOGGER.info(f'Saved results to {save_dir}\\n')\n return crops\n\n def print(self):\n self.display(pprint=True) # print results\n print(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {tuple(self.s)}' % self.t)\n\n def show(self, labels=True):\n self.display(show=True, labels=labels) # show results\n\n def save(self, labels=True, save_dir='runs/detect/exp'):\n save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) # increment save_dir\n self.display(save=True, labels=labels, save_dir=save_dir) # save results\n\n def crop(self, save=True, save_dir='runs/detect/exp'):\n save_dir = increment_path(save_dir, exist_ok=save_dir != 'runs/detect/exp', mkdir=True) if save else None\n return self.display(crop=True, save=save, save_dir=save_dir) # crop results\n\n def render(self, labels=True):\n self.display(render=True, labels=labels) # render results\n return self.imgs\n\n def pandas(self):\n # return detections as pandas DataFrames, i.e. print(results.pandas().xyxy[0])\n new = copy(self) # return copy\n ca = 'xmin', 'ymin', 'xmax', 'ymax', 'confidence', 'class', 'name' # xyxy columns\n cb = 'xcenter', 'ycenter', 'width', 'height', 'confidence', 'class', 'name' # xywh columns\n for k, c in zip(['xyxy', 'xyxyn', 'xywh', 'xywhn'], [ca, ca, cb, cb]):\n a = [[x[:5] + [int(x[5]), self.names[int(x[5])]] for x in x.tolist()] for x in getattr(self, k)] # update\n setattr(new, k, [pd.DataFrame(x, columns=c) for x in a])\n return new\n\n def tolist(self):\n # return a list of Detections objects, i.e. 'for result in results.tolist():'\n r = range(self.n) # iterable\n x = [Detections([self.imgs[i]], [self.pred[i]], [self.files[i]], self.times, self.names, self.s) for i in r]\n # for d in x:\n # for k in ['imgs', 'pred', 'xyxy', 'xyxyn', 'xywh', 'xywhn']:\n # setattr(d, k, getattr(d, k)[0]) # pop out of list\n return x\n\n def __len__(self):\n return self.n # override len(results)\n\n def __str__(self):\n self.print() # override print(results)\n return ''\n\n\nclass Classify(nn.Module):\n # Classification head, i.e. x(b,c1,20,20) to x(b,c2)\n def __init__(self, c1, c2, k=1, s=1, p=None, g=1): # ch_in, ch_out, kernel, stride, padding, groups\n super().__init__()\n self.aap = nn.AdaptiveAvgPool2d(1) # to x(b,c1,1,1)\n self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g) # to x(b,c2,1,1)\n self.flat = nn.Flatten()\n\n def forward(self, x):\n z = torch.cat([self.aap(y) for y in (x if isinstance(x, list) else [x])], 1) # cat if list\n return self.flat(self.conv(z)) # flatten to x(b,c2)\n" }, { "path": "module/detect/models/experimental.py", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nExperimental modules\n\"\"\"\nimport math\n\nimport numpy as np\nimport torch\nimport torch.nn as nn\n\nfrom models.common import Conv\nfrom utils.downloads import attempt_download\n\n\nclass Sum(nn.Module):\n # Weighted sum of 2 or more layers https://arxiv.org/abs/1911.09070\n def __init__(self, n, weight=False): # n: number of inputs\n super().__init__()\n self.weight = weight # apply weights boolean\n self.iter = range(n - 1) # iter object\n if weight:\n self.w = nn.Parameter(-torch.arange(1.0, n) / 2, requires_grad=True) # layer weights\n\n def forward(self, x):\n y = x[0] # no weight\n if self.weight:\n w = torch.sigmoid(self.w) * 2\n for i in self.iter:\n y = y + x[i + 1] * w[i]\n else:\n for i in self.iter:\n y = y + x[i + 1]\n return y\n\n\nclass MixConv2d(nn.Module):\n # Mixed Depth-wise Conv https://arxiv.org/abs/1907.09595\n def __init__(self, c1, c2, k=(1, 3), s=1, equal_ch=True): # ch_in, ch_out, kernel, stride, ch_strategy\n super().__init__()\n n = len(k) # number of convolutions\n if equal_ch: # equal c_ per group\n i = torch.linspace(0, n - 1E-6, c2).floor() # c2 indices\n c_ = [(i == g).sum() for g in range(n)] # intermediate channels\n else: # equal weight.numel() per group\n b = [c2] + [0] * n\n a = np.eye(n + 1, n, k=-1)\n a -= np.roll(a, 1, axis=1)\n a *= np.array(k) ** 2\n a[0] = 1\n c_ = np.linalg.lstsq(a, b, rcond=None)[0].round() # solve for equal weight indices, ax = b\n\n self.m = nn.ModuleList([\n nn.Conv2d(c1, int(c_), k, s, k // 2, groups=math.gcd(c1, int(c_)), bias=False) for k, c_ in zip(k, c_)])\n self.bn = nn.BatchNorm2d(c2)\n self.act = nn.SiLU()\n\n def forward(self, x):\n return self.act(self.bn(torch.cat([m(x) for m in self.m], 1)))\n\n\nclass Ensemble(nn.ModuleList):\n # Ensemble of models\n def __init__(self):\n super().__init__()\n\n def forward(self, x, augment=False, profile=False, visualize=False):\n y = [module(x, augment, profile, visualize)[0] for module in self]\n # y = torch.stack(y).max(0)[0] # max ensemble\n # y = torch.stack(y).mean(0) # mean ensemble\n y = torch.cat(y, 1) # nms ensemble\n return y, None # inference, train output\n\n\ndef attempt_load(weights, device=None, inplace=True, fuse=True):\n # Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a\n from models.yolo import Detect, Model\n\n model = Ensemble()\n for w in weights if isinstance(weights, list) else [weights]:\n ckpt = torch.load(attempt_download(w), map_location='cpu') # load\n ckpt = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model\n model.append(ckpt.fuse().eval() if fuse else ckpt.eval()) # fused or un-fused model in eval mode\n\n # Compatibility updates\n for m in model.modules():\n t = type(m)\n if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):\n m.inplace = inplace # torch 1.7.0 compatibility\n if t is Detect and not isinstance(m.anchor_grid, list):\n delattr(m, 'anchor_grid')\n setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)\n elif t is Conv:\n m._non_persistent_buffers_set = set() # torch 1.6.0 compatibility\n elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):\n m.recompute_scale_factor = None # torch 1.11.0 compatibility\n\n if len(model) == 1:\n return model[-1] # return model\n print(f'Ensemble created with {weights}\\n')\n for k in 'names', 'nc', 'yaml':\n setattr(model, k, getattr(model[0], k))\n model.stride = model[torch.argmax(torch.tensor([m.stride.max() for m in model])).int()].stride # max stride\n assert all(model[0].nc == m.nc for m in model), f'Models have different class counts: {[m.nc for m in model]}'\n return model # return ensemble\n" }, { "path": "module/detect/models/hub/anchors.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n# Default anchors for COCO data\n\n\n# P5 -------------------------------------------------------------------------------------------------------------------\n# P5-640:\nanchors_p5_640:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n\n# P6 -------------------------------------------------------------------------------------------------------------------\n# P6-640: thr=0.25: 0.9964 BPR, 5.54 anchors past thr, n=12, img_size=640, metric_all=0.281/0.716-mean/best, past_thr=0.469-mean: 9,11, 21,19, 17,41, 43,32, 39,70, 86,64, 65,131, 134,130, 120,265, 282,180, 247,354, 512,387\nanchors_p6_640:\n - [9,11, 21,19, 17,41] # P3/8\n - [43,32, 39,70, 86,64] # P4/16\n - [65,131, 134,130, 120,265] # P5/32\n - [282,180, 247,354, 512,387] # P6/64\n\n# P6-1280: thr=0.25: 0.9950 BPR, 5.55 anchors past thr, n=12, img_size=1280, metric_all=0.281/0.714-mean/best, past_thr=0.468-mean: 19,27, 44,40, 38,94, 96,68, 86,152, 180,137, 140,301, 303,264, 238,542, 436,615, 739,380, 925,792\nanchors_p6_1280:\n - [19,27, 44,40, 38,94] # P3/8\n - [96,68, 86,152, 180,137] # P4/16\n - [140,301, 303,264, 238,542] # P5/32\n - [436,615, 739,380, 925,792] # P6/64\n\n# P6-1920: thr=0.25: 0.9950 BPR, 5.55 anchors past thr, n=12, img_size=1920, metric_all=0.281/0.714-mean/best, past_thr=0.468-mean: 28,41, 67,59, 57,141, 144,103, 129,227, 270,205, 209,452, 455,396, 358,812, 653,922, 1109,570, 1387,1187\nanchors_p6_1920:\n - [28,41, 67,59, 57,141] # P3/8\n - [144,103, 129,227, 270,205] # P4/16\n - [209,452, 455,396, 358,812] # P5/32\n - [653,922, 1109,570, 1387,1187] # P6/64\n\n\n# P7 -------------------------------------------------------------------------------------------------------------------\n# P7-640: thr=0.25: 0.9962 BPR, 6.76 anchors past thr, n=15, img_size=640, metric_all=0.275/0.733-mean/best, past_thr=0.466-mean: 11,11, 13,30, 29,20, 30,46, 61,38, 39,92, 78,80, 146,66, 79,163, 149,150, 321,143, 157,303, 257,402, 359,290, 524,372\nanchors_p7_640:\n - [11,11, 13,30, 29,20] # P3/8\n - [30,46, 61,38, 39,92] # P4/16\n - [78,80, 146,66, 79,163] # P5/32\n - [149,150, 321,143, 157,303] # P6/64\n - [257,402, 359,290, 524,372] # P7/128\n\n# P7-1280: thr=0.25: 0.9968 BPR, 6.71 anchors past thr, n=15, img_size=1280, metric_all=0.273/0.732-mean/best, past_thr=0.463-mean: 19,22, 54,36, 32,77, 70,83, 138,71, 75,173, 165,159, 148,334, 375,151, 334,317, 251,626, 499,474, 750,326, 534,814, 1079,818\nanchors_p7_1280:\n - [19,22, 54,36, 32,77] # P3/8\n - [70,83, 138,71, 75,173] # P4/16\n - [165,159, 148,334, 375,151] # P5/32\n - [334,317, 251,626, 499,474] # P6/64\n - [750,326, 534,814, 1079,818] # P7/128\n\n# P7-1920: thr=0.25: 0.9968 BPR, 6.71 anchors past thr, n=15, img_size=1920, metric_all=0.273/0.732-mean/best, past_thr=0.463-mean: 29,34, 81,55, 47,115, 105,124, 207,107, 113,259, 247,238, 222,500, 563,227, 501,476, 376,939, 749,711, 1126,489, 801,1222, 1618,1227\nanchors_p7_1920:\n - [29,34, 81,55, 47,115] # P3/8\n - [105,124, 207,107, 113,259] # P4/16\n - [247,238, 222,500, 563,227] # P5/32\n - [501,476, 376,939, 749,711] # P6/64\n - [1126,489, 801,1222, 1618,1227] # P7/128\n" }, { "path": "module/detect/models/hub/yolov3-spp.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# darknet53 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [32, 3, 1]], # 0\n [-1, 1, Conv, [64, 3, 2]], # 1-P1/2\n [-1, 1, Bottleneck, [64]],\n [-1, 1, Conv, [128, 3, 2]], # 3-P2/4\n [-1, 2, Bottleneck, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 5-P3/8\n [-1, 8, Bottleneck, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 7-P4/16\n [-1, 8, Bottleneck, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32\n [-1, 4, Bottleneck, [1024]], # 10\n ]\n\n# YOLOv3-SPP head\nhead:\n [[-1, 1, Bottleneck, [1024, False]],\n [-1, 1, SPP, [512, [5, 9, 13]]],\n [-1, 1, Conv, [1024, 3, 1]],\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)\n\n [-2, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P4\n [-1, 1, Bottleneck, [512, False]],\n [-1, 1, Bottleneck, [512, False]],\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)\n\n [-2, 1, Conv, [128, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P3\n [-1, 1, Bottleneck, [256, False]],\n [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)\n\n [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov3-tiny.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors:\n - [10,14, 23,27, 37,58] # P4/16\n - [81,82, 135,169, 344,319] # P5/32\n\n# YOLOv3-tiny backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [16, 3, 1]], # 0\n [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 1-P1/2\n [-1, 1, Conv, [32, 3, 1]],\n [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 3-P2/4\n [-1, 1, Conv, [64, 3, 1]],\n [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 5-P3/8\n [-1, 1, Conv, [128, 3, 1]],\n [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 7-P4/16\n [-1, 1, Conv, [256, 3, 1]],\n [-1, 1, nn.MaxPool2d, [2, 2, 0]], # 9-P5/32\n [-1, 1, Conv, [512, 3, 1]],\n [-1, 1, nn.ZeroPad2d, [[0, 1, 0, 1]]], # 11\n [-1, 1, nn.MaxPool2d, [2, 1, 0]], # 12\n ]\n\n# YOLOv3-tiny head\nhead:\n [[-1, 1, Conv, [1024, 3, 1]],\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, Conv, [512, 3, 1]], # 15 (P5/32-large)\n\n [-2, 1, Conv, [128, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P4\n [-1, 1, Conv, [256, 3, 1]], # 19 (P4/16-medium)\n\n [[19, 15], 1, Detect, [nc, anchors]], # Detect(P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov3.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# darknet53 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [32, 3, 1]], # 0\n [-1, 1, Conv, [64, 3, 2]], # 1-P1/2\n [-1, 1, Bottleneck, [64]],\n [-1, 1, Conv, [128, 3, 2]], # 3-P2/4\n [-1, 2, Bottleneck, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 5-P3/8\n [-1, 8, Bottleneck, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 7-P4/16\n [-1, 8, Bottleneck, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P5/32\n [-1, 4, Bottleneck, [1024]], # 10\n ]\n\n# YOLOv3 head\nhead:\n [[-1, 1, Bottleneck, [1024, False]],\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, Conv, [1024, 3, 1]],\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, Conv, [1024, 3, 1]], # 15 (P5/32-large)\n\n [-2, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P4\n [-1, 1, Bottleneck, [512, False]],\n [-1, 1, Bottleneck, [512, False]],\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, Conv, [512, 3, 1]], # 22 (P4/16-medium)\n\n [-2, 1, Conv, [128, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P3\n [-1, 1, Bottleneck, [256, False]],\n [-1, 2, Bottleneck, [256, False]], # 27 (P3/8-small)\n\n [[27, 22, 15], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov5-bifpn.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 BiFPN head\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14, 6], 1, Concat, [1]], # cat P4 <--- BiFPN change\n [-1, 3, C3, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov5-fpn.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 FPN head\nhead:\n [[-1, 3, C3, [1024, False]], # 10 (P5/32-large)\n\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 3, C3, [512, False]], # 14 (P4/16-medium)\n\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 3, C3, [256, False]], # 18 (P3/8-small)\n\n [[18, 14, 10], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov5-p2.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors: 3 # AutoAnchor evolves 3 anchors per P output layer\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 head with (P2, P3, P4, P5) outputs\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [128, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 2], 1, Concat, [1]], # cat backbone P2\n [-1, 1, C3, [128, False]], # 21 (P2/4-xsmall)\n\n [-1, 1, Conv, [128, 3, 2]],\n [[-1, 18], 1, Concat, [1]], # cat head P3\n [-1, 3, C3, [256, False]], # 24 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 27 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 30 (P5/32-large)\n\n [[21, 24, 27, 30], 1, Detect, [nc, anchors]], # Detect(P2, P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov5-p34.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.33 # model depth multiple\nwidth_multiple: 0.50 # layer channel multiple\nanchors: 3 # AutoAnchor evolves 3 anchors per P output layer\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [ [ -1, 1, Conv, [ 64, 6, 2, 2 ] ], # 0-P1/2\n [ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4\n [ -1, 3, C3, [ 128 ] ],\n [ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8\n [ -1, 6, C3, [ 256 ] ],\n [ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16\n [ -1, 9, C3, [ 512 ] ],\n [ -1, 1, Conv, [ 1024, 3, 2 ] ], # 7-P5/32\n [ -1, 3, C3, [ 1024 ] ],\n [ -1, 1, SPPF, [ 1024, 5 ] ], # 9\n ]\n\n# YOLOv5 v6.0 head with (P3, P4) outputs\nhead:\n [ [ -1, 1, Conv, [ 512, 1, 1 ] ],\n [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],\n [ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4\n [ -1, 3, C3, [ 512, False ] ], # 13\n\n [ -1, 1, Conv, [ 256, 1, 1 ] ],\n [ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],\n [ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3\n [ -1, 3, C3, [ 256, False ] ], # 17 (P3/8-small)\n\n [ -1, 1, Conv, [ 256, 3, 2 ] ],\n [ [ -1, 14 ], 1, Concat, [ 1 ] ], # cat head P4\n [ -1, 3, C3, [ 512, False ] ], # 20 (P4/16-medium)\n\n [ [ 17, 20 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4)\n ]\n" }, { "path": "module/detect/models/hub/yolov5-p6.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors: 3 # AutoAnchor evolves 3 anchors per P output layer\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [768, 3, 2]], # 7-P5/32\n [-1, 3, C3, [768]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 11\n ]\n\n# YOLOv5 v6.0 head with (P3, P4, P5, P6) outputs\nhead:\n [[-1, 1, Conv, [768, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P5\n [-1, 3, C3, [768, False]], # 15\n\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 19\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 23 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 20], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 26 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 16], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [768, False]], # 29 (P5/32-large)\n\n [-1, 1, Conv, [768, 3, 2]],\n [[-1, 12], 1, Concat, [1]], # cat head P6\n [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)\n\n [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)\n ]\n" }, { "path": "module/detect/models/hub/yolov5-p7.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors: 3 # AutoAnchor evolves 3 anchors per P output layer\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [768, 3, 2]], # 7-P5/32\n [-1, 3, C3, [768]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64\n [-1, 3, C3, [1024]],\n [-1, 1, Conv, [1280, 3, 2]], # 11-P7/128\n [-1, 3, C3, [1280]],\n [-1, 1, SPPF, [1280, 5]], # 13\n ]\n\n# YOLOv5 v6.0 head with (P3, P4, P5, P6, P7) outputs\nhead:\n [[-1, 1, Conv, [1024, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 10], 1, Concat, [1]], # cat backbone P6\n [-1, 3, C3, [1024, False]], # 17\n\n [-1, 1, Conv, [768, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P5\n [-1, 3, C3, [768, False]], # 21\n\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 25\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 29 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 26], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 32 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 22], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [768, False]], # 35 (P5/32-large)\n\n [-1, 1, Conv, [768, 3, 2]],\n [[-1, 18], 1, Concat, [1]], # cat head P6\n [-1, 3, C3, [1024, False]], # 38 (P6/64-xlarge)\n\n [-1, 1, Conv, [1024, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P7\n [-1, 3, C3, [1280, False]], # 41 (P7/128-xxlarge)\n\n [[29, 32, 35, 38, 41], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6, P7)\n ]\n" }, { "path": "module/detect/models/hub/yolov5-panet.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 PANet head\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov5l6.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors:\n - [19,27, 44,40, 38,94] # P3/8\n - [96,68, 86,152, 180,137] # P4/16\n - [140,301, 303,264, 238,542] # P5/32\n - [436,615, 739,380, 925,792] # P6/64\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [768, 3, 2]], # 7-P5/32\n [-1, 3, C3, [768]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 11\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [768, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P5\n [-1, 3, C3, [768, False]], # 15\n\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 19\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 23 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 20], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 26 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 16], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [768, False]], # 29 (P5/32-large)\n\n [-1, 1, Conv, [768, 3, 2]],\n [[-1, 12], 1, Concat, [1]], # cat head P6\n [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)\n\n [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)\n ]\n" }, { "path": "module/detect/models/hub/yolov5m6.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.67 # model depth multiple\nwidth_multiple: 0.75 # layer channel multiple\nanchors:\n - [19,27, 44,40, 38,94] # P3/8\n - [96,68, 86,152, 180,137] # P4/16\n - [140,301, 303,264, 238,542] # P5/32\n - [436,615, 739,380, 925,792] # P6/64\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [768, 3, 2]], # 7-P5/32\n [-1, 3, C3, [768]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 11\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [768, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P5\n [-1, 3, C3, [768, False]], # 15\n\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 19\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 23 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 20], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 26 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 16], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [768, False]], # 29 (P5/32-large)\n\n [-1, 1, Conv, [768, 3, 2]],\n [[-1, 12], 1, Concat, [1]], # cat head P6\n [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)\n\n [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)\n ]\n" }, { "path": "module/detect/models/hub/yolov5n6.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.33 # model depth multiple\nwidth_multiple: 0.25 # layer channel multiple\nanchors:\n - [19,27, 44,40, 38,94] # P3/8\n - [96,68, 86,152, 180,137] # P4/16\n - [140,301, 303,264, 238,542] # P5/32\n - [436,615, 739,380, 925,792] # P6/64\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [768, 3, 2]], # 7-P5/32\n [-1, 3, C3, [768]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 11\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [768, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P5\n [-1, 3, C3, [768, False]], # 15\n\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 19\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 23 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 20], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 26 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 16], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [768, False]], # 29 (P5/32-large)\n\n [-1, 1, Conv, [768, 3, 2]],\n [[-1, 12], 1, Concat, [1]], # cat head P6\n [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)\n\n [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)\n ]\n" }, { "path": "module/detect/models/hub/yolov5s-ghost.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.33 # model depth multiple\nwidth_multiple: 0.50 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, GhostConv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3Ghost, [128]],\n [-1, 1, GhostConv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3Ghost, [256]],\n [-1, 1, GhostConv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3Ghost, [512]],\n [-1, 1, GhostConv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3Ghost, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, GhostConv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3Ghost, [512, False]], # 13\n\n [-1, 1, GhostConv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3Ghost, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, GhostConv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3Ghost, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, GhostConv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3Ghost, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov5s-transformer.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.33 # model depth multiple\nwidth_multiple: 0.50 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3TR, [1024]], # 9 <--- C3TR() Transformer module\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/hub/yolov5s6.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.33 # model depth multiple\nwidth_multiple: 0.50 # layer channel multiple\nanchors:\n - [19,27, 44,40, 38,94] # P3/8\n - [96,68, 86,152, 180,137] # P4/16\n - [140,301, 303,264, 238,542] # P5/32\n - [436,615, 739,380, 925,792] # P6/64\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [768, 3, 2]], # 7-P5/32\n [-1, 3, C3, [768]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 11\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [768, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P5\n [-1, 3, C3, [768, False]], # 15\n\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 19\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 23 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 20], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 26 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 16], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [768, False]], # 29 (P5/32-large)\n\n [-1, 1, Conv, [768, 3, 2]],\n [[-1, 12], 1, Concat, [1]], # cat head P6\n [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)\n\n [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)\n ]\n" }, { "path": "module/detect/models/hub/yolov5x6.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.33 # model depth multiple\nwidth_multiple: 1.25 # layer channel multiple\nanchors:\n - [19,27, 44,40, 38,94] # P3/8\n - [96,68, 86,152, 180,137] # P4/16\n - [140,301, 303,264, 238,542] # P5/32\n - [436,615, 739,380, 925,792] # P6/64\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [768, 3, 2]], # 7-P5/32\n [-1, 3, C3, [768]],\n [-1, 1, Conv, [1024, 3, 2]], # 9-P6/64\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 11\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [768, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 8], 1, Concat, [1]], # cat backbone P5\n [-1, 3, C3, [768, False]], # 15\n\n [-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 19\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 23 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 20], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 26 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 16], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [768, False]], # 29 (P5/32-large)\n\n [-1, 1, Conv, [768, 3, 2]],\n [[-1, 12], 1, Concat, [1]], # cat head P6\n [-1, 3, C3, [1024, False]], # 32 (P6/64-xlarge)\n\n [[23, 26, 29, 32], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5, P6)\n ]\n" }, { "path": "module/detect/models/tf.py", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nTensorFlow, Keras and TFLite versions of YOLOv5\nAuthored by https://github.com/zldrobit in PR https://github.com/ultralytics/yolov5/pull/1127\n\nUsage:\n $ python models/tf.py --weights yolov5s.pt\n\nExport:\n $ python path/to/export.py --weights yolov5s.pt --include saved_model pb tflite tfjs\n\"\"\"\n\nimport argparse\nimport sys\nfrom copy import deepcopy\nfrom pathlib import Path\n\nFILE = Path(__file__).resolve()\nROOT = FILE.parents[1] # YOLOv5 root directory\nif str(ROOT) not in sys.path:\n sys.path.append(str(ROOT)) # add ROOT to PATH\n# ROOT = ROOT.relative_to(Path.cwd()) # relative\n\nimport numpy as np\nimport tensorflow as tf\nimport torch\nimport torch.nn as nn\nfrom tensorflow import keras\n\nfrom models.common import (C3, SPP, SPPF, Bottleneck, BottleneckCSP, C3x, Concat, Conv, CrossConv, DWConv,\n DWConvTranspose2d, Focus, autopad)\nfrom models.experimental import MixConv2d, attempt_load\nfrom models.yolo import Detect\nfrom utils.activations import SiLU\nfrom utils.general import LOGGER, make_divisible, print_args\n\n\nclass TFBN(keras.layers.Layer):\n # TensorFlow BatchNormalization wrapper\n def __init__(self, w=None):\n super().__init__()\n self.bn = keras.layers.BatchNormalization(\n beta_initializer=keras.initializers.Constant(w.bias.numpy()),\n gamma_initializer=keras.initializers.Constant(w.weight.numpy()),\n moving_mean_initializer=keras.initializers.Constant(w.running_mean.numpy()),\n moving_variance_initializer=keras.initializers.Constant(w.running_var.numpy()),\n epsilon=w.eps)\n\n def call(self, inputs):\n return self.bn(inputs)\n\n\nclass TFPad(keras.layers.Layer):\n # Pad inputs in spatial dimensions 1 and 2\n def __init__(self, pad):\n super().__init__()\n if isinstance(pad, int):\n self.pad = tf.constant([[0, 0], [pad, pad], [pad, pad], [0, 0]])\n else: # tuple/list\n self.pad = tf.constant([[0, 0], [pad[0], pad[0]], [pad[1], pad[1]], [0, 0]])\n\n def call(self, inputs):\n return tf.pad(inputs, self.pad, mode='constant', constant_values=0)\n\n\nclass TFConv(keras.layers.Layer):\n # Standard convolution\n def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):\n # ch_in, ch_out, weights, kernel, stride, padding, groups\n super().__init__()\n assert g == 1, \"TF v2.2 Conv2D does not support 'groups' argument\"\n # TensorFlow convolution padding is inconsistent with PyTorch (e.g. k=3 s=2 'SAME' padding)\n # see https://stackoverflow.com/questions/52975843/comparing-conv2d-with-padding-between-tensorflow-and-pytorch\n conv = keras.layers.Conv2D(\n filters=c2,\n kernel_size=k,\n strides=s,\n padding='SAME' if s == 1 else 'VALID',\n use_bias=not hasattr(w, 'bn'),\n kernel_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),\n bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))\n self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])\n self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity\n self.act = activations(w.act) if act else tf.identity\n\n def call(self, inputs):\n return self.act(self.bn(self.conv(inputs)))\n\n\nclass TFDWConv(keras.layers.Layer):\n # Depthwise convolution\n def __init__(self, c1, c2, k=1, s=1, p=None, act=True, w=None):\n # ch_in, ch_out, weights, kernel, stride, padding, groups\n super().__init__()\n assert c2 % c1 == 0, f'TFDWConv() output={c2} must be a multiple of input={c1} channels'\n conv = keras.layers.DepthwiseConv2D(\n kernel_size=k,\n depth_multiplier=c2 // c1,\n strides=s,\n padding='SAME' if s == 1 else 'VALID',\n use_bias=not hasattr(w, 'bn'),\n depthwise_initializer=keras.initializers.Constant(w.conv.weight.permute(2, 3, 1, 0).numpy()),\n bias_initializer='zeros' if hasattr(w, 'bn') else keras.initializers.Constant(w.conv.bias.numpy()))\n self.conv = conv if s == 1 else keras.Sequential([TFPad(autopad(k, p)), conv])\n self.bn = TFBN(w.bn) if hasattr(w, 'bn') else tf.identity\n self.act = activations(w.act) if act else tf.identity\n\n def call(self, inputs):\n return self.act(self.bn(self.conv(inputs)))\n\n\nclass TFDWConvTranspose2d(keras.layers.Layer):\n # Depthwise ConvTranspose2d\n def __init__(self, c1, c2, k=1, s=1, p1=0, p2=0, w=None):\n # ch_in, ch_out, weights, kernel, stride, padding, groups\n super().__init__()\n assert c1 == c2, f'TFDWConv() output={c2} must be equal to input={c1} channels'\n assert k == 4 and p1 == 1, 'TFDWConv() only valid for k=4 and p1=1'\n weight, bias = w.weight.permute(2, 3, 1, 0).numpy(), w.bias.numpy()\n self.c1 = c1\n self.conv = [\n keras.layers.Conv2DTranspose(filters=1,\n kernel_size=k,\n strides=s,\n padding='VALID',\n output_padding=p2,\n use_bias=True,\n kernel_initializer=keras.initializers.Constant(weight[..., i:i + 1]),\n bias_initializer=keras.initializers.Constant(bias[i])) for i in range(c1)]\n\n def call(self, inputs):\n return tf.concat([m(x) for m, x in zip(self.conv, tf.split(inputs, self.c1, 3))], 3)[:, 1:-1, 1:-1]\n\n\nclass TFFocus(keras.layers.Layer):\n # Focus wh information into c-space\n def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True, w=None):\n # ch_in, ch_out, kernel, stride, padding, groups\n super().__init__()\n self.conv = TFConv(c1 * 4, c2, k, s, p, g, act, w.conv)\n\n def call(self, inputs): # x(b,w,h,c) -> y(b,w/2,h/2,4c)\n # inputs = inputs / 255 # normalize 0-255 to 0-1\n inputs = [inputs[:, ::2, ::2, :], inputs[:, 1::2, ::2, :], inputs[:, ::2, 1::2, :], inputs[:, 1::2, 1::2, :]]\n return self.conv(tf.concat(inputs, 3))\n\n\nclass TFBottleneck(keras.layers.Layer):\n # Standard bottleneck\n def __init__(self, c1, c2, shortcut=True, g=1, e=0.5, w=None): # ch_in, ch_out, shortcut, groups, expansion\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)\n self.cv2 = TFConv(c_, c2, 3, 1, g=g, w=w.cv2)\n self.add = shortcut and c1 == c2\n\n def call(self, inputs):\n return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))\n\n\nclass TFCrossConv(keras.layers.Layer):\n # Cross Convolution\n def __init__(self, c1, c2, k=3, s=1, g=1, e=1.0, shortcut=False, w=None):\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = TFConv(c1, c_, (1, k), (1, s), w=w.cv1)\n self.cv2 = TFConv(c_, c2, (k, 1), (s, 1), g=g, w=w.cv2)\n self.add = shortcut and c1 == c2\n\n def call(self, inputs):\n return inputs + self.cv2(self.cv1(inputs)) if self.add else self.cv2(self.cv1(inputs))\n\n\nclass TFConv2d(keras.layers.Layer):\n # Substitution for PyTorch nn.Conv2D\n def __init__(self, c1, c2, k, s=1, g=1, bias=True, w=None):\n super().__init__()\n assert g == 1, \"TF v2.2 Conv2D does not support 'groups' argument\"\n self.conv = keras.layers.Conv2D(filters=c2,\n kernel_size=k,\n strides=s,\n padding='VALID',\n use_bias=bias,\n kernel_initializer=keras.initializers.Constant(\n w.weight.permute(2, 3, 1, 0).numpy()),\n bias_initializer=keras.initializers.Constant(w.bias.numpy()) if bias else None)\n\n def call(self, inputs):\n return self.conv(inputs)\n\n\nclass TFBottleneckCSP(keras.layers.Layer):\n # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks\n def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):\n # ch_in, ch_out, number, shortcut, groups, expansion\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)\n self.cv2 = TFConv2d(c1, c_, 1, 1, bias=False, w=w.cv2)\n self.cv3 = TFConv2d(c_, c_, 1, 1, bias=False, w=w.cv3)\n self.cv4 = TFConv(2 * c_, c2, 1, 1, w=w.cv4)\n self.bn = TFBN(w.bn)\n self.act = lambda x: keras.activations.swish(x)\n self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])\n\n def call(self, inputs):\n y1 = self.cv3(self.m(self.cv1(inputs)))\n y2 = self.cv2(inputs)\n return self.cv4(self.act(self.bn(tf.concat((y1, y2), axis=3))))\n\n\nclass TFC3(keras.layers.Layer):\n # CSP Bottleneck with 3 convolutions\n def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):\n # ch_in, ch_out, number, shortcut, groups, expansion\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)\n self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)\n self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)\n self.m = keras.Sequential([TFBottleneck(c_, c_, shortcut, g, e=1.0, w=w.m[j]) for j in range(n)])\n\n def call(self, inputs):\n return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))\n\n\nclass TFC3x(keras.layers.Layer):\n # 3 module with cross-convolutions\n def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, w=None):\n # ch_in, ch_out, number, shortcut, groups, expansion\n super().__init__()\n c_ = int(c2 * e) # hidden channels\n self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)\n self.cv2 = TFConv(c1, c_, 1, 1, w=w.cv2)\n self.cv3 = TFConv(2 * c_, c2, 1, 1, w=w.cv3)\n self.m = keras.Sequential([\n TFCrossConv(c_, c_, k=3, s=1, g=g, e=1.0, shortcut=shortcut, w=w.m[j]) for j in range(n)])\n\n def call(self, inputs):\n return self.cv3(tf.concat((self.m(self.cv1(inputs)), self.cv2(inputs)), axis=3))\n\n\nclass TFSPP(keras.layers.Layer):\n # Spatial pyramid pooling layer used in YOLOv3-SPP\n def __init__(self, c1, c2, k=(5, 9, 13), w=None):\n super().__init__()\n c_ = c1 // 2 # hidden channels\n self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)\n self.cv2 = TFConv(c_ * (len(k) + 1), c2, 1, 1, w=w.cv2)\n self.m = [keras.layers.MaxPool2D(pool_size=x, strides=1, padding='SAME') for x in k]\n\n def call(self, inputs):\n x = self.cv1(inputs)\n return self.cv2(tf.concat([x] + [m(x) for m in self.m], 3))\n\n\nclass TFSPPF(keras.layers.Layer):\n # Spatial pyramid pooling-Fast layer\n def __init__(self, c1, c2, k=5, w=None):\n super().__init__()\n c_ = c1 // 2 # hidden channels\n self.cv1 = TFConv(c1, c_, 1, 1, w=w.cv1)\n self.cv2 = TFConv(c_ * 4, c2, 1, 1, w=w.cv2)\n self.m = keras.layers.MaxPool2D(pool_size=k, strides=1, padding='SAME')\n\n def call(self, inputs):\n x = self.cv1(inputs)\n y1 = self.m(x)\n y2 = self.m(y1)\n return self.cv2(tf.concat([x, y1, y2, self.m(y2)], 3))\n\n\nclass TFDetect(keras.layers.Layer):\n # TF YOLOv5 Detect layer\n def __init__(self, nc=80, anchors=(), ch=(), imgsz=(640, 640), w=None): # detection layer\n super().__init__()\n self.stride = tf.convert_to_tensor(w.stride.numpy(), dtype=tf.float32)\n self.nc = nc # number of classes\n self.no = nc + 5 # number of outputs per anchor\n self.nl = len(anchors) # number of detection layers\n self.na = len(anchors[0]) // 2 # number of anchors\n self.grid = [tf.zeros(1)] * self.nl # init grid\n self.anchors = tf.convert_to_tensor(w.anchors.numpy(), dtype=tf.float32)\n self.anchor_grid = tf.reshape(self.anchors * tf.reshape(self.stride, [self.nl, 1, 1]), [self.nl, 1, -1, 1, 2])\n self.m = [TFConv2d(x, self.no * self.na, 1, w=w.m[i]) for i, x in enumerate(ch)]\n self.training = False # set to False after building model\n self.imgsz = imgsz\n for i in range(self.nl):\n ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]\n self.grid[i] = self._make_grid(nx, ny)\n\n def call(self, inputs):\n z = [] # inference output\n x = []\n for i in range(self.nl):\n x.append(self.m[i](inputs[i]))\n # x(bs,20,20,255) to x(bs,3,20,20,85)\n ny, nx = self.imgsz[0] // self.stride[i], self.imgsz[1] // self.stride[i]\n x[i] = tf.reshape(x[i], [-1, ny * nx, self.na, self.no])\n\n if not self.training: # inference\n y = tf.sigmoid(x[i])\n grid = tf.transpose(self.grid[i], [0, 2, 1, 3]) - 0.5\n anchor_grid = tf.transpose(self.anchor_grid[i], [0, 2, 1, 3]) * 4\n xy = (y[..., 0:2] * 2 + grid) * self.stride[i] # xy\n wh = y[..., 2:4] ** 2 * anchor_grid\n # Normalize xywh to 0-1 to reduce calibration error\n xy /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)\n wh /= tf.constant([[self.imgsz[1], self.imgsz[0]]], dtype=tf.float32)\n y = tf.concat([xy, wh, y[..., 4:]], -1)\n z.append(tf.reshape(y, [-1, self.na * ny * nx, self.no]))\n\n return tf.transpose(x, [0, 2, 1, 3]) if self.training else (tf.concat(z, 1), x)\n\n @staticmethod\n def _make_grid(nx=20, ny=20):\n # yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])\n # return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()\n xv, yv = tf.meshgrid(tf.range(nx), tf.range(ny))\n return tf.cast(tf.reshape(tf.stack([xv, yv], 2), [1, 1, ny * nx, 2]), dtype=tf.float32)\n\n\nclass TFUpsample(keras.layers.Layer):\n # TF version of torch.nn.Upsample()\n def __init__(self, size, scale_factor, mode, w=None): # warning: all arguments needed including 'w'\n super().__init__()\n assert scale_factor == 2, \"scale_factor must be 2\"\n self.upsample = lambda x: tf.image.resize(x, (x.shape[1] * 2, x.shape[2] * 2), method=mode)\n # self.upsample = keras.layers.UpSampling2D(size=scale_factor, interpolation=mode)\n # with default arguments: align_corners=False, half_pixel_centers=False\n # self.upsample = lambda x: tf.raw_ops.ResizeNearestNeighbor(images=x,\n # size=(x.shape[1] * 2, x.shape[2] * 2))\n\n def call(self, inputs):\n return self.upsample(inputs)\n\n\nclass TFConcat(keras.layers.Layer):\n # TF version of torch.concat()\n def __init__(self, dimension=1, w=None):\n super().__init__()\n assert dimension == 1, \"convert only NCHW to NHWC concat\"\n self.d = 3\n\n def call(self, inputs):\n return tf.concat(inputs, self.d)\n\n\ndef parse_model(d, ch, model, imgsz): # model_dict, input_channels(3)\n LOGGER.info(f\"\\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}\")\n anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']\n na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors\n no = na * (nc + 5) # number of outputs = anchors * (classes + 5)\n\n layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out\n for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args\n m_str = m\n m = eval(m) if isinstance(m, str) else m # eval strings\n for j, a in enumerate(args):\n try:\n args[j] = eval(a) if isinstance(a, str) else a # eval strings\n except NameError:\n pass\n\n n = max(round(n * gd), 1) if n > 1 else n # depth gain\n if m in [\n nn.Conv2d, Conv, DWConv, DWConvTranspose2d, Bottleneck, SPP, SPPF, MixConv2d, Focus, CrossConv,\n BottleneckCSP, C3, C3x]:\n c1, c2 = ch[f], args[0]\n c2 = make_divisible(c2 * gw, 8) if c2 != no else c2\n\n args = [c1, c2, *args[1:]]\n if m in [BottleneckCSP, C3, C3x]:\n args.insert(2, n)\n n = 1\n elif m is nn.BatchNorm2d:\n args = [ch[f]]\n elif m is Concat:\n c2 = sum(ch[-1 if x == -1 else x + 1] for x in f)\n elif m is Detect:\n args.append([ch[x + 1] for x in f])\n if isinstance(args[1], int): # number of anchors\n args[1] = [list(range(args[1] * 2))] * len(f)\n args.append(imgsz)\n else:\n c2 = ch[f]\n\n tf_m = eval('TF' + m_str.replace('nn.', ''))\n m_ = keras.Sequential([tf_m(*args, w=model.model[i][j]) for j in range(n)]) if n > 1 \\\n else tf_m(*args, w=model.model[i]) # module\n\n torch_m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module\n t = str(m)[8:-2].replace('__main__.', '') # module type\n np = sum(x.numel() for x in torch_m_.parameters()) # number params\n m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params\n LOGGER.info(f'{i:>3}{str(f):>18}{str(n):>3}{np:>10} {t:<40}{str(args):<30}') # print\n save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist\n layers.append(m_)\n ch.append(c2)\n return keras.Sequential(layers), sorted(save)\n\n\nclass TFModel:\n # TF YOLOv5 model\n def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, model=None, imgsz=(640, 640)): # model, channels, classes\n super().__init__()\n if isinstance(cfg, dict):\n self.yaml = cfg # model dict\n else: # is *.yaml\n import yaml # for torch hub\n self.yaml_file = Path(cfg).name\n with open(cfg) as f:\n self.yaml = yaml.load(f, Loader=yaml.FullLoader) # model dict\n\n # Define model\n if nc and nc != self.yaml['nc']:\n LOGGER.info(f\"Overriding {cfg} nc={self.yaml['nc']} with nc={nc}\")\n self.yaml['nc'] = nc # override yaml value\n self.model, self.savelist = parse_model(deepcopy(self.yaml), ch=[ch], model=model, imgsz=imgsz)\n\n def predict(self,\n inputs,\n tf_nms=False,\n agnostic_nms=False,\n topk_per_class=100,\n topk_all=100,\n iou_thres=0.45,\n conf_thres=0.25):\n y = [] # outputs\n x = inputs\n for m in self.model.layers:\n if m.f != -1: # if not from previous layer\n x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers\n\n x = m(x) # run\n y.append(x if m.i in self.savelist else None) # save output\n\n # Add TensorFlow NMS\n if tf_nms:\n boxes = self._xywh2xyxy(x[0][..., :4])\n probs = x[0][:, :, 4:5]\n classes = x[0][:, :, 5:]\n scores = probs * classes\n if agnostic_nms:\n nms = AgnosticNMS()((boxes, classes, scores), topk_all, iou_thres, conf_thres)\n else:\n boxes = tf.expand_dims(boxes, 2)\n nms = tf.image.combined_non_max_suppression(boxes,\n scores,\n topk_per_class,\n topk_all,\n iou_thres,\n conf_thres,\n clip_boxes=False)\n return nms, x[1]\n return x[0] # output only first tensor [1,6300,85] = [xywh, conf, class0, class1, ...]\n # x = x[0][0] # [x(1,6300,85), ...] to x(6300,85)\n # xywh = x[..., :4] # x(6300,4) boxes\n # conf = x[..., 4:5] # x(6300,1) confidences\n # cls = tf.reshape(tf.cast(tf.argmax(x[..., 5:], axis=1), tf.float32), (-1, 1)) # x(6300,1) classes\n # return tf.concat([conf, cls, xywh], 1)\n\n @staticmethod\n def _xywh2xyxy(xywh):\n # Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right\n x, y, w, h = tf.split(xywh, num_or_size_splits=4, axis=-1)\n return tf.concat([x - w / 2, y - h / 2, x + w / 2, y + h / 2], axis=-1)\n\n\nclass AgnosticNMS(keras.layers.Layer):\n # TF Agnostic NMS\n def call(self, input, topk_all, iou_thres, conf_thres):\n # wrap map_fn to avoid TypeSpec related error https://stackoverflow.com/a/65809989/3036450\n return tf.map_fn(lambda x: self._nms(x, topk_all, iou_thres, conf_thres),\n input,\n fn_output_signature=(tf.float32, tf.float32, tf.float32, tf.int32),\n name='agnostic_nms')\n\n @staticmethod\n def _nms(x, topk_all=100, iou_thres=0.45, conf_thres=0.25): # agnostic NMS\n boxes, classes, scores = x\n class_inds = tf.cast(tf.argmax(classes, axis=-1), tf.float32)\n scores_inp = tf.reduce_max(scores, -1)\n selected_inds = tf.image.non_max_suppression(boxes,\n scores_inp,\n max_output_size=topk_all,\n iou_threshold=iou_thres,\n score_threshold=conf_thres)\n selected_boxes = tf.gather(boxes, selected_inds)\n padded_boxes = tf.pad(selected_boxes,\n paddings=[[0, topk_all - tf.shape(selected_boxes)[0]], [0, 0]],\n mode=\"CONSTANT\",\n constant_values=0.0)\n selected_scores = tf.gather(scores_inp, selected_inds)\n padded_scores = tf.pad(selected_scores,\n paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],\n mode=\"CONSTANT\",\n constant_values=-1.0)\n selected_classes = tf.gather(class_inds, selected_inds)\n padded_classes = tf.pad(selected_classes,\n paddings=[[0, topk_all - tf.shape(selected_boxes)[0]]],\n mode=\"CONSTANT\",\n constant_values=-1.0)\n valid_detections = tf.shape(selected_inds)[0]\n return padded_boxes, padded_scores, padded_classes, valid_detections\n\n\ndef activations(act=nn.SiLU):\n # Returns TF activation from input PyTorch activation\n if isinstance(act, nn.LeakyReLU):\n return lambda x: keras.activations.relu(x, alpha=0.1)\n elif isinstance(act, nn.Hardswish):\n return lambda x: x * tf.nn.relu6(x + 3) * 0.166666667\n elif isinstance(act, (nn.SiLU, SiLU)):\n return lambda x: keras.activations.swish(x)\n else:\n raise Exception(f'no matching TensorFlow activation found for PyTorch activation {act}')\n\n\ndef representative_dataset_gen(dataset, ncalib=100):\n # Representative dataset generator for use with converter.representative_dataset, returns a generator of np arrays\n for n, (path, img, im0s, vid_cap, string) in enumerate(dataset):\n im = np.transpose(img, [1, 2, 0])\n im = np.expand_dims(im, axis=0).astype(np.float32)\n im /= 255\n yield [im]\n if n >= ncalib:\n break\n\n\ndef run(\n weights=ROOT / 'yolov5s.pt', # weights path\n imgsz=(640, 640), # inference size h,w\n batch_size=1, # batch size\n dynamic=False, # dynamic batch size\n):\n # PyTorch model\n im = torch.zeros((batch_size, 3, *imgsz)) # BCHW image\n model = attempt_load(weights, device=torch.device('cpu'), inplace=True, fuse=False)\n _ = model(im) # inference\n model.info()\n\n # TensorFlow model\n im = tf.zeros((batch_size, *imgsz, 3)) # BHWC image\n tf_model = TFModel(cfg=model.yaml, model=model, nc=model.nc, imgsz=imgsz)\n _ = tf_model.predict(im) # inference\n\n # Keras model\n im = keras.Input(shape=(*imgsz, 3), batch_size=None if dynamic else batch_size)\n keras_model = keras.Model(inputs=im, outputs=tf_model.predict(im))\n keras_model.summary()\n\n LOGGER.info('PyTorch, TensorFlow and Keras models successfully verified.\\nUse export.py for TF model export.')\n\n\ndef parse_opt():\n parser = argparse.ArgumentParser()\n parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='weights path')\n parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')\n parser.add_argument('--batch-size', type=int, default=1, help='batch size')\n parser.add_argument('--dynamic', action='store_true', help='dynamic batch size')\n opt = parser.parse_args()\n opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand\n print_args(vars(opt))\n return opt\n\n\ndef main(opt):\n run(**vars(opt))\n\n\nif __name__ == \"__main__\":\n opt = parse_opt()\n main(opt)\n" }, { "path": "module/detect/models/yolo.py", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nYOLO-specific modules\n\nUsage:\n $ python path/to/models/yolo.py --cfg yolov5s.yaml\n\"\"\"\n\nimport argparse\nimport contextlib\nimport os\nimport platform\nimport sys\nfrom copy import deepcopy\nfrom pathlib import Path\n\nFILE = Path(__file__).resolve()\nROOT = FILE.parents[1] # YOLOv5 root directory\nif str(ROOT) not in sys.path:\n sys.path.append(str(ROOT)) # add ROOT to PATH\nif platform.system() != 'Windows':\n ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative\n\nfrom models.common import *\nfrom models.experimental import *\nfrom utils.autoanchor import check_anchor_order\nfrom utils.general import LOGGER, check_version, check_yaml, make_divisible, print_args\nfrom utils.plots import feature_visualization\nfrom utils.torch_utils import (fuse_conv_and_bn, initialize_weights, model_info, profile, scale_img, select_device,\n time_sync)\n\ntry:\n import thop # for FLOPs computation\nexcept ImportError:\n thop = None\n\n\nclass Detect(nn.Module):\n stride = None # strides computed during build\n onnx_dynamic = False # ONNX export parameter\n export = False # export mode\n\n def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer\n super().__init__()\n self.nc = nc # number of classes\n self.no = nc + 5 # number of outputs per anchor\n self.nl = len(anchors) # number of detection layers\n self.na = len(anchors[0]) // 2 # number of anchors\n self.grid = [torch.zeros(1)] * self.nl # init grid\n self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid\n self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)\n self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv\n self.inplace = inplace # use in-place ops (e.g. slice assignment)\n\n def forward(self, x):\n z = [] # inference output\n for i in range(self.nl):\n x[i] = self.m[i](x[i]) # conv\n bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)\n x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()\n\n if not self.training: # inference\n if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:\n self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)\n\n y = x[i].sigmoid()\n if self.inplace:\n y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy\n y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh\n else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953\n xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0\n xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy\n wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh\n y = torch.cat((xy, wh, conf), 4)\n z.append(y.view(bs, -1, self.no))\n\n return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)\n\n def _make_grid(self, nx=20, ny=20, i=0):\n d = self.anchors[i].device\n t = self.anchors[i].dtype\n shape = 1, self.na, ny, nx, 2 # grid shape\n y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)\n if check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibility\n yv, xv = torch.meshgrid(y, x, indexing='ij')\n else:\n yv, xv = torch.meshgrid(y, x)\n grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5\n anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)\n return grid, anchor_grid\n\n\nclass Model(nn.Module):\n # YOLOv5 model\n def __init__(self, cfg='yolov5s.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes\n super().__init__()\n if isinstance(cfg, dict):\n self.yaml = cfg # model dict\n else: # is *.yaml\n import yaml # for torch hub\n self.yaml_file = Path(cfg).name\n with open(cfg, encoding='ascii', errors='ignore') as f:\n self.yaml = yaml.safe_load(f) # model dict\n\n # Define model\n ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels\n if nc and nc != self.yaml['nc']:\n LOGGER.info(f\"overriding model.yaml nc={self.yaml['nc']} with nc={nc}\")\n self.yaml['nc'] = nc # override yaml value\n if anchors:\n LOGGER.info(f'overriding model.yaml anchors with anchors={anchors}')\n self.yaml['anchors'] = round(anchors) # override yaml value\n self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist\n self.names = [str(i) for i in range(self.yaml['nc'])] # default names\n self.inplace = self.yaml.get('inplace', True)\n\n # Build strides, anchors\n m = self.model[-1] # Detect()\n if isinstance(m, Detect):\n s = 256 # 2x min stride\n m.inplace = self.inplace\n m.stride = torch.tensor([s / x.shape[-2] for x in self.forward(torch.zeros(1, ch, s, s))]) # forward\n check_anchor_order(m) # must be in pixel-space (not grid-space)\n m.anchors /= m.stride.view(-1, 1, 1)\n self.stride = m.stride\n self._initialize_biases() # only run once\n\n # Init weights, biases\n initialize_weights(self)\n self.info()\n LOGGER.debug('')\n\n def forward(self, x, augment=False, profile=False, visualize=False):\n if augment:\n return self._forward_augment(x) # augmented inference, None\n return self._forward_once(x, profile, visualize) # single-scale inference, train\n\n def _forward_augment(self, x):\n img_size = x.shape[-2:] # height, width\n s = [1, 0.83, 0.67] # scales\n f = [None, 3, None] # flips (2-ud, 3-lr)\n y = [] # outputs\n for si, fi in zip(s, f):\n xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))\n yi = self._forward_once(xi)[0] # forward\n # cv2.imwrite(f'img_{si}.jpg', 255 * xi[0].cpu().numpy().transpose((1, 2, 0))[:, :, ::-1]) # save\n yi = self._descale_pred(yi, fi, si, img_size)\n y.append(yi)\n y = self._clip_augmented(y) # clip augmented tails\n return torch.cat(y, 1), None # augmented inference, train\n\n def _forward_once(self, x, profile=False, visualize=False):\n y, dt = [], [] # outputs\n for m in self.model:\n if m.f != -1: # if not from previous layer\n x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers\n if profile:\n self._profile_one_layer(m, x, dt)\n x = m(x) # run\n y.append(x if m.i in self.save else None) # save output\n if visualize:\n feature_visualization(x, m.type, m.i, save_dir=visualize)\n return x\n\n def _descale_pred(self, p, flips, scale, img_size):\n # de-scale predictions following augmented inference (inverse operation)\n if self.inplace:\n p[..., :4] /= scale # de-scale\n if flips == 2:\n p[..., 1] = img_size[0] - p[..., 1] # de-flip ud\n elif flips == 3:\n p[..., 0] = img_size[1] - p[..., 0] # de-flip lr\n else:\n x, y, wh = p[..., 0:1] / scale, p[..., 1:2] / scale, p[..., 2:4] / scale # de-scale\n if flips == 2:\n y = img_size[0] - y # de-flip ud\n elif flips == 3:\n x = img_size[1] - x # de-flip lr\n p = torch.cat((x, y, wh, p[..., 4:]), -1)\n return p\n\n def _clip_augmented(self, y):\n # Clip YOLOv5 augmented inference tails\n nl = self.model[-1].nl # number of detection layers (P3-P5)\n g = sum(4 ** x for x in range(nl)) # grid points\n e = 1 # exclude layer count\n i = (y[0].shape[1] // g) * sum(4 ** x for x in range(e)) # indices\n y[0] = y[0][:, :-i] # large\n i = (y[-1].shape[1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indices\n y[-1] = y[-1][:, i:] # small\n return y\n\n def _profile_one_layer(self, m, x, dt):\n c = isinstance(m, Detect) # is final layer, copy input as inplace fix\n o = thop.profile(m, inputs=(x.copy() if c else x,), verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPs\n t = time_sync()\n for _ in range(10):\n m(x.copy() if c else x)\n dt.append((time_sync() - t) * 100)\n if m == self.model[0]:\n LOGGER.info(f\"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} module\")\n LOGGER.info(f'{dt[-1]:10.2f} {o:10.2f} {m.np:10.0f} {m.type}')\n if c:\n LOGGER.info(f\"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total\")\n\n def _initialize_biases(self, cf=None): # initialize biases into Detect(), cf is class frequency\n # https://arxiv.org/abs/1708.02002 section 3.3\n # cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1.\n m = self.model[-1] # Detect() module\n for mi, s in zip(m.m, m.stride): # from\n b = mi.bias.view(m.na, -1).detach() # conv.bias(255) to (3,85)\n b[:, 4] += math.log(8 / (640 / s) ** 2) # obj (8 objects per 640 image)\n b[:, 5:] += math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # cls\n mi.bias = torch.nn.Parameter(b.view(-1), requires_grad=True)\n\n def _print_biases(self):\n m = self.model[-1] # Detect() module\n for mi in m.m: # from\n b = mi.bias.detach().view(m.na, -1).T # conv.bias(255) to (3,85)\n LOGGER.info(\n ('%6g Conv2d.bias:' + '%10.3g' * 6) % (mi.weight.shape[1], *b[:5].mean(1).tolist(), b[5:].mean())\n )\n\n # def _print_weights(self):\n # for m in self.model.modules():\n # if type(m) is Bottleneck:\n # LOGGER.info('%10.3g' % (m.w.detach().sigmoid() * 2)) # shortcut weights\n\n def fuse(self): # fuse model Conv2d() + BatchNorm2d() layers\n LOGGER.info('fuse yolo layers (conv & bn)')\n for m in self.model.modules():\n if isinstance(m, (Conv, DWConv)) and hasattr(m, 'bn'):\n m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv\n delattr(m, 'bn') # remove batchnorm\n m.forward = m.forward_fuse # update forward\n self.info()\n return self\n\n def info(self, verbose=False, img_size=640): # print model information\n model_info(self, verbose, img_size)\n\n def _apply(self, fn):\n # Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers\n self = super()._apply(fn)\n m = self.model[-1] # Detect()\n if isinstance(m, Detect):\n m.stride = fn(m.stride)\n m.grid = list(map(fn, m.grid))\n if isinstance(m.anchor_grid, list):\n m.anchor_grid = list(map(fn, m.anchor_grid))\n return self\n\n\ndef parse_model(d, ch): # model_dict, input_channels(3)\n LOGGER.debug(f\"\\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}\")\n anchors, nc, gd, gw = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple']\n na = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchors\n no = na * (nc + 5) # number of outputs = anchors * (classes + 5)\n\n layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out\n for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args\n m = eval(m) if isinstance(m, str) else m # eval strings\n for j, a in enumerate(args):\n with contextlib.suppress(NameError):\n args[j] = eval(a) if isinstance(a, str) else a # eval strings\n\n n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain\n if m in (Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,\n BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x):\n c1, c2 = ch[f], args[0]\n if c2 != no: # if not output\n c2 = make_divisible(c2 * gw, 8)\n\n args = [c1, c2, *args[1:]]\n if m in [BottleneckCSP, C3, C3TR, C3Ghost, C3x]:\n args.insert(2, n) # number of repeats\n n = 1\n elif m is nn.BatchNorm2d:\n args = [ch[f]]\n elif m is Concat:\n c2 = sum(ch[x] for x in f)\n elif m is Detect:\n args.append([ch[x] for x in f])\n if isinstance(args[1], int): # number of anchors\n args[1] = [list(range(args[1] * 2))] * len(f)\n elif m is Contract:\n c2 = ch[f] * args[0] ** 2\n elif m is Expand:\n c2 = ch[f] // args[0] ** 2\n else:\n c2 = ch[f]\n\n m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module\n t = str(m)[8:-2].replace('__main__.', '') # module type\n np = sum(x.numel() for x in m_.parameters()) # number params\n m_.i, m_.f, m_.type, m_.np = i, f, t, np # attach index, 'from' index, type, number params\n LOGGER.debug(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # print\n save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist\n layers.append(m_)\n if i == 0:\n ch = []\n ch.append(c2)\n return nn.Sequential(*layers), sorted(save)\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser()\n parser.add_argument('--cfg', type=str, default='yolov5s.yaml', help='model.yaml')\n parser.add_argument('--batch-size', type=int, default=1, help='total batch size for all GPUs')\n parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')\n parser.add_argument('--profile', action='store_true', help='profile model speed')\n parser.add_argument('--line-profile', action='store_true', help='profile model speed layer by layer')\n parser.add_argument('--test', action='store_true', help='test all yolo*.yaml')\n opt = parser.parse_args()\n opt.cfg = check_yaml(opt.cfg) # check YAML\n print_args(vars(opt))\n device = select_device(opt.device)\n\n # Create model\n im = torch.rand(opt.batch_size, 3, 640, 640).to(device)\n model = Model(opt.cfg).to(device)\n\n # Options\n if opt.line_profile: # profile layer by layer\n _ = model(im, profile=True)\n\n elif opt.profile: # profile forward-backward\n results = profile(input=im, ops=[model], n=3)\n\n elif opt.test: # test all models\n for cfg in Path(ROOT / 'models').rglob('yolo*.yaml'):\n try:\n _ = Model(cfg)\n except Exception as e:\n print(f'Error in {cfg}: {e}')\n\n else: # report fused model summary\n model.fuse()\n" }, { "path": "module/detect/models/yolov5l.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.0 # model depth multiple\nwidth_multiple: 1.0 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/yolov5m.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.67 # model depth multiple\nwidth_multiple: 0.75 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/yolov5n.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.33 # model depth multiple\nwidth_multiple: 0.25 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/yolov5s.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 0.33 # model depth multiple\nwidth_multiple: 0.50 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/models/yolov5x.yaml", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\n# Parameters\nnc: 80 # number of classes\ndepth_multiple: 1.33 # model depth multiple\nwidth_multiple: 1.25 # layer channel multiple\nanchors:\n - [10,13, 16,30, 33,23] # P3/8\n - [30,61, 62,45, 59,119] # P4/16\n - [116,90, 156,198, 373,326] # P5/32\n\n# YOLOv5 v6.0 backbone\nbackbone:\n # [from, number, module, args]\n [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2\n [-1, 1, Conv, [128, 3, 2]], # 1-P2/4\n [-1, 3, C3, [128]],\n [-1, 1, Conv, [256, 3, 2]], # 3-P3/8\n [-1, 6, C3, [256]],\n [-1, 1, Conv, [512, 3, 2]], # 5-P4/16\n [-1, 9, C3, [512]],\n [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32\n [-1, 3, C3, [1024]],\n [-1, 1, SPPF, [1024, 5]], # 9\n ]\n\n# YOLOv5 v6.0 head\nhead:\n [[-1, 1, Conv, [512, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 6], 1, Concat, [1]], # cat backbone P4\n [-1, 3, C3, [512, False]], # 13\n\n [-1, 1, Conv, [256, 1, 1]],\n [-1, 1, nn.Upsample, [None, 2, 'nearest']],\n [[-1, 4], 1, Concat, [1]], # cat backbone P3\n [-1, 3, C3, [256, False]], # 17 (P3/8-small)\n\n [-1, 1, Conv, [256, 3, 2]],\n [[-1, 14], 1, Concat, [1]], # cat head P4\n [-1, 3, C3, [512, False]], # 20 (P4/16-medium)\n\n [-1, 1, Conv, [512, 3, 2]],\n [[-1, 10], 1, Concat, [1]], # cat head P5\n [-1, 3, C3, [1024, False]], # 23 (P5/32-large)\n\n [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)\n ]\n" }, { "path": "module/detect/requirements.txt", "content": "# YOLOv5 requirements\n# Usage: pip install -r requirements.txt\n\n# Base ----------------------------------------\nmatplotlib>=3.2.2\nnumpy>=1.18.5\nopencv-python>=4.1.1\nPillow>=7.1.2\nPyYAML>=5.3.1\nrequests>=2.23.0\nscipy>=1.4.1\ntorch>=1.7.0\ntorchvision>=0.8.1\ntqdm>=4.64.0\nprotobuf<4.21.3 # https://github.com/ultralytics/yolov5/issues/8012\n\n# Logging -------------------------------------\ntensorboard>=2.4.1\n# wandb\n\n# Plotting ------------------------------------\npandas>=1.1.4\nseaborn>=0.11.0\n\n# Export --------------------------------------\n# coremltools>=4.1 # CoreML export\n# onnx>=1.9.0 # ONNX export\n# onnx-simplifier>=0.4.1 # ONNX simplifier\n# nvidia-pyindex # TensorRT export\n# nvidia-tensorrt # TensorRT export\n# scikit-learn==0.19.2 # CoreML quantization\n# tensorflow>=2.4.1 # TFLite export\n# tensorflowjs>=3.9.0 # TF.js export\n# openvino-dev # OpenVINO export\n\n# Extras --------------------------------------\nipython # interactive notebook\npsutil # system utilization\nthop>=0.1.1 # FLOPs computation\n# albumentations>=1.0.3\n# pycocotools>=2.0 # COCO mAP\n# roboflow\n" }, { "path": "module/detect/utils/__init__.py", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\r\n\"\"\"\r\nutils/initialization\r\n\"\"\"\r\n\r\n\r\ndef notebook_init(verbose=True):\r\n # Check system software and hardware\r\n print('Checking setup...')\r\n\r\n import os\r\n import shutil\r\n\r\n from utils.general import check_requirements, emojis, is_colab\r\n from utils.torch_utils import select_device # imports\r\n\r\n check_requirements(('psutil', 'IPython'))\r\n import psutil\r\n from IPython import display # to display images and clear console output\r\n\r\n if is_colab():\r\n shutil.rmtree('/content/sample_data', ignore_errors=True) # remove colab /sample_data directory\r\n\r\n # System info\r\n if verbose:\r\n gb = 1 << 30 # bytes to GiB (1024 ** 3)\r\n ram = psutil.virtual_memory().total\r\n total, used, free = shutil.disk_usage(\"/\")\r\n display.clear_output()\r\n s = f'({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)'\r\n else:\r\n s = ''\r\n\r\n select_device(newline=False)\r\n print(emojis(f'Setup complete ✅ {s}'))\r\n return display\r\n" }, { "path": "module/detect/utils/activations.py", "content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nActivation functions\n\"\"\"\n\nimport torch\nimport torch.nn as nn\nimport torch.nn.functional as F\n\n\nclass SiLU(nn.Module):\n # SiLU activation https://arxiv.org/pdf/1606.08415.pdf\n @staticmethod\n def forward(x):\n return x * torch.sigmoid(x)\n\n\nclass Hardswish(nn.Module):\n # Hard-SiLU activation\n @staticmethod\n def forward(x):\n # return x * F.hardsigmoid(x) # for TorchScript and CoreML\n return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX\n\n\nclass Mish(nn.Module):\n # Mish activation https://github.com/digantamisra98/Mish\n @staticmethod\n def forward(x):\n return x * F.softplus(x).tanh()\n\n\nclass MemoryEfficientMish(nn.Module):\n # Mish activation memory-efficient\n class F(torch.autograd.Function):\n\n @staticmethod\n def forward(ctx, x):\n ctx.save_for_backward(x)\n return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))\n\n @staticmethod\n def backward(ctx, grad_output):\n x = ctx.saved_tensors[0]\n sx = torch.sigmoid(x)\n fx = F.softplus(x).tanh()\n return grad_output * (fx + x * sx * (1 - fx * fx))\n\n def forward(self, x):\n return self.F.apply(x)\n\n\nclass FReLU(nn.Module):\n # FReLU activation https://arxiv.org/abs/2007.11824\n def __init__(self, c1, k=3): # ch_in, kernel\n super().__init__()\n self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)\n self.bn = nn.BatchNorm2d(c1)\n\n def forward(self, x):\n return torch.max(x, self.bn(self.conv(x)))\n\n\nclass AconC(nn.Module):\n r\"\"\" ACON activation (activate or not)\n AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter\n according to \"Activate or Not: Learning Customized Activation\"\n 
 \n
\n \n\n
\n\n
\n\n## Viewing Runs\n\nToggle Details
\nWhen you first train, W&B will prompt you to create a new account and will generate an **API key** for you. If you are an existing user you can retrieve your key from https://wandb.ai/authorize. This key is used to tell W&B where to log your data. You only need to supply your key once, and then it is remembered on the same device.\n\nW&B will create a cloud **project** (default is 'YOLOv5') for your training runs, and each new training run will be\nprovided a unique run **name** within that project as project/name. You can also manually set your project and run name\nas:\n\n```shell\n$ python trainfd.py --project ... --name ...\n```\n\nYOLOv5 notebook\nexample:\n\n\n\n
\n\n## Disabling wandb\n\n- training after running `wandb disabled` inside that directory creates no wandb run\n \n\n- To enable wandb again, run `wandb online`\n \n\n## Advanced Usage\n\nYou can leverage W&B artifacts and Tables integration to easily visualize and manage your datasets, models and training\nevaluations. Here are some quick examples to get you started.\n\nToggle Details
\nRun information streams from your environment to the W&B cloud console as you train. This allows you to monitor and even cancel runs in realtime . All important information is logged:\n\n- Training & Validation losses\n- Metrics: Precision, Recall, mAP@0.5, mAP@0.5:0.95\n- Learning Rate over time\n- A bounding box debugging panel, showing the training progress over time\n- GPU: Type, **GPU Utilization**, power, temperature, **CUDA memory usage**\n- System: Disk I/0, CPU utilization, RAM memory usage\n- Your trained model as W&B Artifact\n- Environment: OS and Python types, Git repository and state, **training command**\n\n
\n
\n\n1: TrainFD and Log Evaluation simultaneousy
\n This is an extension of the previous section, but it'll also training after uploading the dataset. This also evaluation Table\n Evaluation table compares your predictions and ground truths across the validation set for each epoch. It uses the references to the already uploaded datasets,\n so no images will be uploaded from your system more than once.\n\n
\n\nUsage
\n Code $ python trainfd.py --upload_data eval\n\n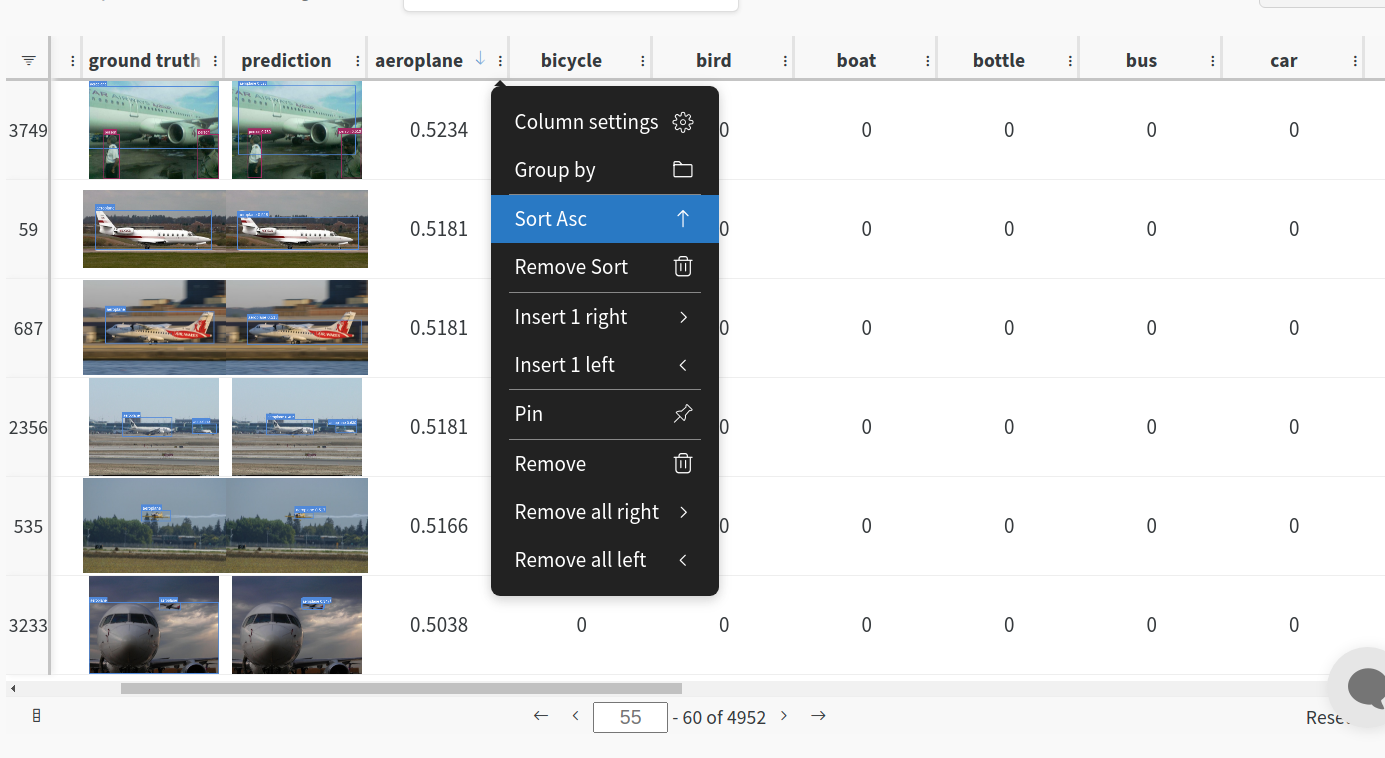\n\n2. Visualize and Version Datasets
\nLog, visualize, dynamically query, and understand your data with \nW&B Tables. You can use the following command to log your dataset as a W&B Table. This will generate a\n{dataset}_wandb.yaml file which can be used to train from dataset artifact.\n \n
\n\nUsage
\n Code $ python utils/logger/wandb/log_dataset.py --project ... --name ... --data .. \n\n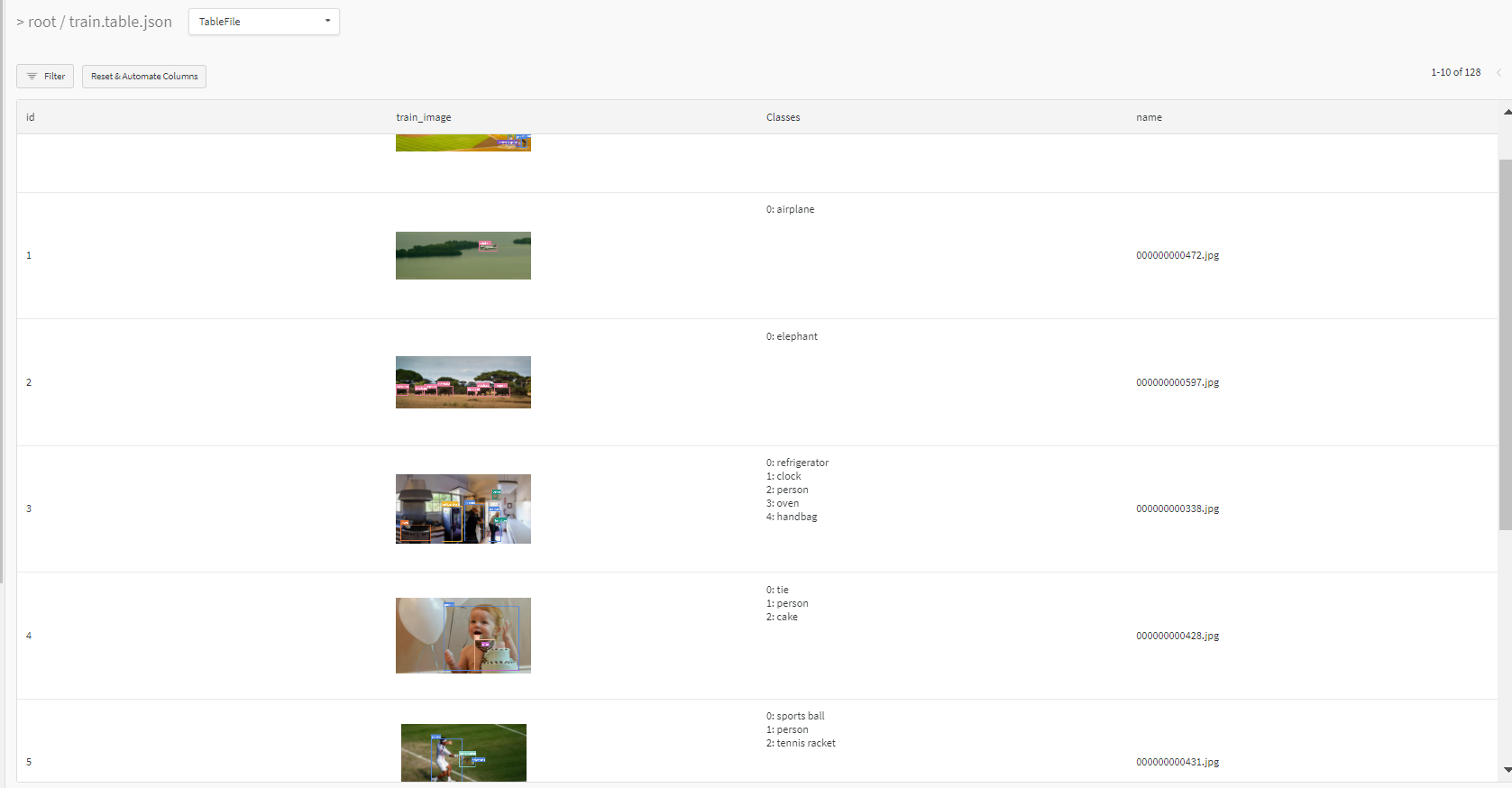\n\n3: TrainFD using dataset artifact
\n When you upload a dataset as described in the first section, you get a new config file with an added `_wandb` to its name. This file contains the information that\n can be used to train a model directly from the dataset artifact. This also logs evaluation \n\n
\n\nUsage
\n Code $ python trainfd.py --data {data}_wandb.yaml \n\n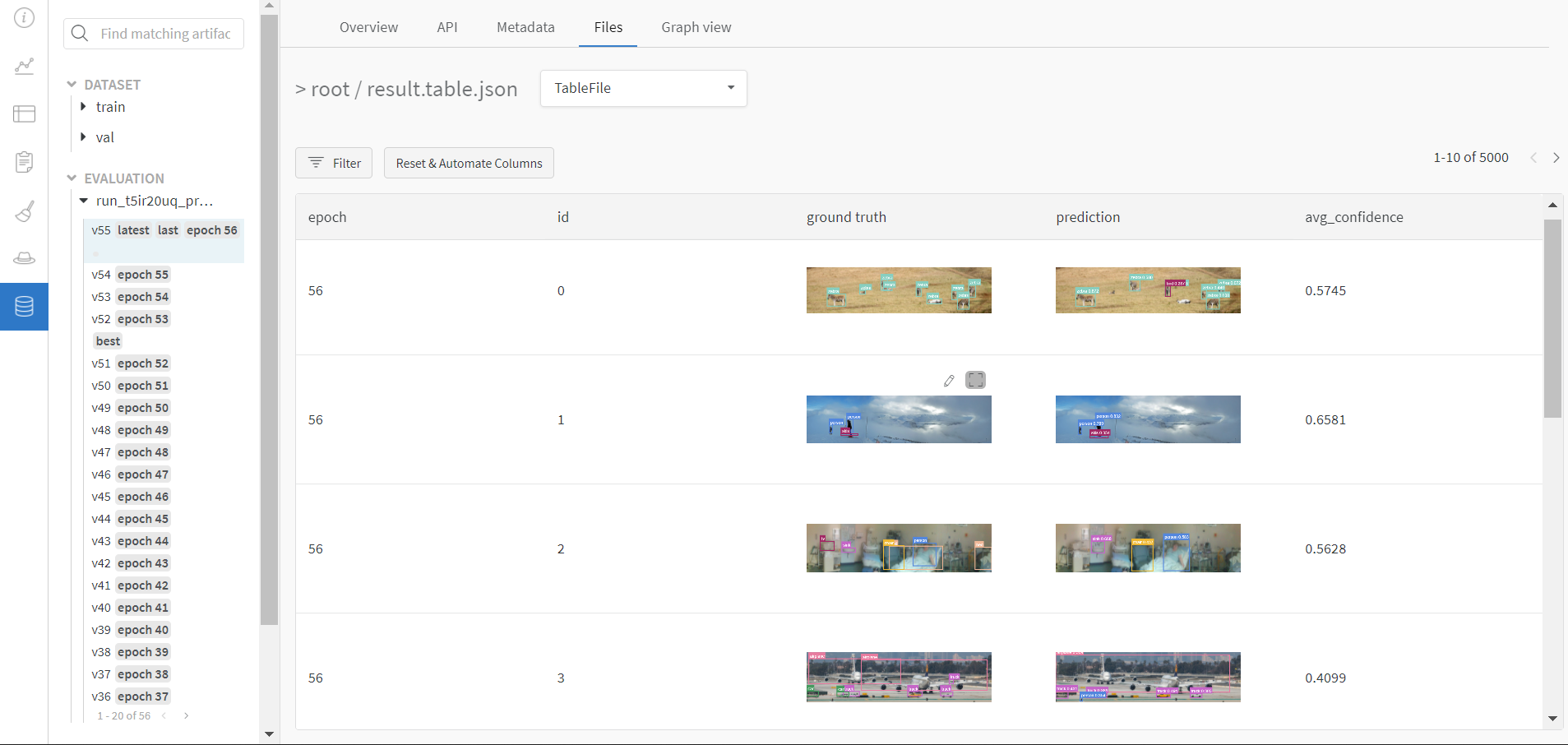\n\n4: Save model checkpoints as artifacts
\n To enable saving and versioning checkpoints of your experiment, pass `--save_period n` with the base cammand, where `n` represents checkpoint interval.\n You can also log both the dataset and model checkpoints simultaneously. If not passed, only the final model will be logged\n\n\n
\n\nUsage
\n Code $ python trainfd.py --save_period 1 \n\n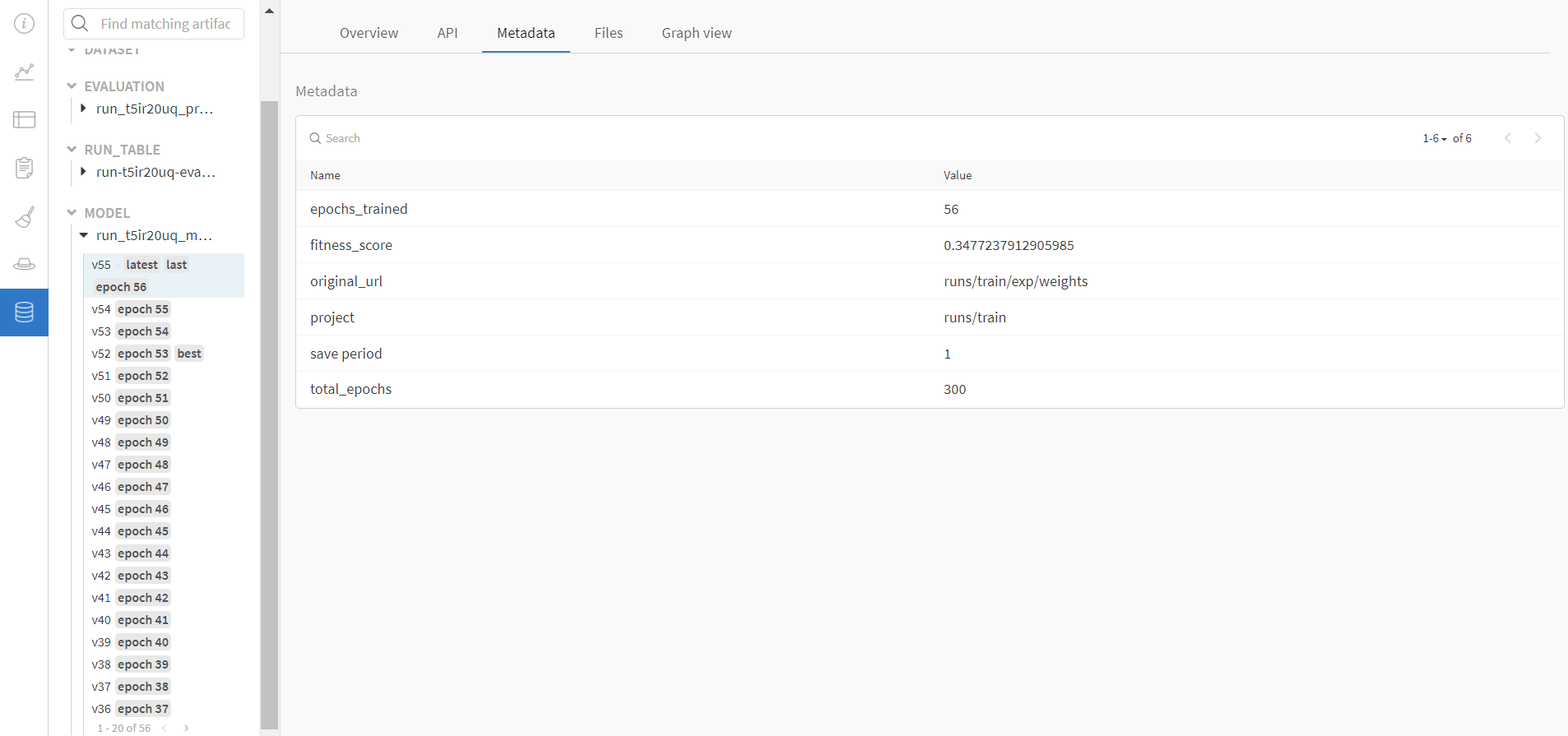\n\n5: Resume runs from checkpoint artifacts.
\nAny run can be resumed using artifacts if the--resume argument starts with wandb-artifact:// prefix followed by the run path, i.e, wandb-artifact://username/project/runid . This doesn't require the model checkpoint to be present on the local system.\n\n\n
\n\nUsage
\n Code $ python trainfd.py --resume wandb-artifact://{run_path} \n\n\n\n6: Resume runs from dataset artifact & checkpoint artifacts.
\n Local dataset or model checkpoints are not required. This can be used to resume runs directly on a different device \n The syntax is same as the previous section, but you'll need to lof both the dataset and model checkpoints as artifacts, i.e, set bot--upload_dataset or\n train from _wandb.yaml file and set --save_period\n\n\n
\n\n\n\nUsage
\n Code $ python trainfd.py --resume wandb-artifact://{run_path} \n\n\n\nReports
\nW&B Reports can be created from your saved runs for sharing online. Once a report is created you will receive a link you can use to publically share your results. Here is an example report created from the COCO128 tutorial trainings of all four YOLOv5 models ([link](https://wandb.ai/glenn-jocher/yolov5_tutorial/reports/YOLOv5-COCO128-Tutorial-Results--VmlldzozMDI5OTY)).\n\n \n\n## Environments\n\nYOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies\nincluding [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn)\n, [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n\n- **Google Colab and Kaggle** notebooks with free\n GPU: \n- **Google Cloud** Deep Learning VM.\n See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n- **Docker Image**.\n See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)
\n\n## Environments\n\nYOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies\nincluding [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn)\n, [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n\n- **Google Colab and Kaggle** notebooks with free\n GPU: \n- **Google Cloud** Deep Learning VM.\n See [GCP Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/GCP-Quickstart)\n- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/AWS-Quickstart)\n- **Docker Image**.\n See [Docker Quickstart Guide](https://github.com/ultralytics/yolov5/wiki/Docker-Quickstart)  \n\n## Status\n\n\n\nIf this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous\nIntegration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5\ntraining ([trainfd.py](https://github.com/ultralytics/yolov5/blob/master/train.py)),\nvalidation ([eval.py](https://github.com/ultralytics/yolov5/blob/master/val.py)),\ninference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and\nexport ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24\nhours and on every commit.\n"
},
{
"path": "module/detect/utils/loggers/wandb/__init__.py",
"content": ""
},
{
"path": "module/detect/utils/loggers/wandb/log_dataset.py",
"content": "import argparse\n\nfrom wandb_utils import WandbLogger\n\nfrom utils.general import LOGGER\n\nWANDB_ARTIFACT_PREFIX = 'wandb-artifact://'\n\n\ndef create_dataset_artifact(opt):\n logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused\n if not logger.wandb:\n LOGGER.info(\"install wandb using `pip install wandb` to log the dataset\")\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser()\n parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')\n parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')\n parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')\n parser.add_argument('--entity', default=None, help='W&B entity')\n parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')\n\n opt = parser.parse_args()\n opt.resume = False # Explicitly disallow resume check for dataset upload job\n\n create_dataset_artifact(opt)\n"
},
{
"path": "module/detect/utils/loggers/wandb/sweep.py",
"content": "import sys\nfrom pathlib import Path\n\nimport wandb\n\nFILE = Path(__file__).resolve()\nROOT = FILE.parents[3] # YOLOv5 root directory\nif str(ROOT) not in sys.path:\n sys.path.append(str(ROOT)) # add ROOT to PATH\n\nfrom train import parse_opt, train\nfrom utils.callbacks import Callbacks\nfrom utils.general import increment_path\nfrom utils.torch_utils import select_device\n\n\ndef sweep():\n wandb.init()\n # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.\n hyp_dict = vars(wandb.config).get(\"_items\").copy()\n\n # Workaround: get necessary opt args\n opt = parse_opt(known=True)\n opt.batch_size = hyp_dict.get(\"batch_size\")\n opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))\n opt.epochs = hyp_dict.get(\"epochs\")\n opt.nosave = True\n opt.data = hyp_dict.get(\"data\")\n opt.weights = str(opt.weights)\n opt.cfg = str(opt.cfg)\n opt.data = str(opt.data)\n opt.hyp = str(opt.hyp)\n opt.project = str(opt.project)\n device = select_device(opt.device, batch_size=opt.batch_size)\n\n # train\n train(hyp_dict, opt, device, callbacks=Callbacks())\n\n\nif __name__ == \"__main__\":\n sweep()\n"
},
{
"path": "module/detect/utils/loggers/wandb/sweep.yaml",
"content": "# Hyperparameters for training\n# To set range-\n# Provide min and max values as:\n# parameter:\n#\n# min: scalar\n# max: scalar\n# OR\n#\n# Set a specific list of search space-\n# parameter:\n# values: [scalar1, scalar2, scalar3...]\n#\n# You can use grid, bayesian and hyperopt search strategy\n# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration\n\nprogram: utils/loggers/wandb/sweep.py\nmethod: random\nmetric:\n name: metrics/mAP_0.5\n goal: maximize\n\nparameters:\n # hyperparameters: set either min, max range or values list\n data:\n value: \"data/coco128.yaml\"\n batch_size:\n values: [64]\n epochs:\n values: [10]\n\n lr0:\n distribution: uniform\n min: 1e-5\n max: 1e-1\n lrf:\n distribution: uniform\n min: 0.01\n max: 1.0\n momentum:\n distribution: uniform\n min: 0.6\n max: 0.98\n weight_decay:\n distribution: uniform\n min: 0.0\n max: 0.001\n warmup_epochs:\n distribution: uniform\n min: 0.0\n max: 5.0\n warmup_momentum:\n distribution: uniform\n min: 0.0\n max: 0.95\n warmup_bias_lr:\n distribution: uniform\n min: 0.0\n max: 0.2\n box:\n distribution: uniform\n min: 0.02\n max: 0.2\n cls:\n distribution: uniform\n min: 0.2\n max: 4.0\n cls_pw:\n distribution: uniform\n min: 0.5\n max: 2.0\n obj:\n distribution: uniform\n min: 0.2\n max: 4.0\n obj_pw:\n distribution: uniform\n min: 0.5\n max: 2.0\n iou_t:\n distribution: uniform\n min: 0.1\n max: 0.7\n anchor_t:\n distribution: uniform\n min: 2.0\n max: 8.0\n fl_gamma:\n distribution: uniform\n min: 0.0\n max: 4.0\n hsv_h:\n distribution: uniform\n min: 0.0\n max: 0.1\n hsv_s:\n distribution: uniform\n min: 0.0\n max: 0.9\n hsv_v:\n distribution: uniform\n min: 0.0\n max: 0.9\n degrees:\n distribution: uniform\n min: 0.0\n max: 45.0\n translate:\n distribution: uniform\n min: 0.0\n max: 0.9\n scale:\n distribution: uniform\n min: 0.0\n max: 0.9\n shear:\n distribution: uniform\n min: 0.0\n max: 10.0\n perspective:\n distribution: uniform\n min: 0.0\n max: 0.001\n flipud:\n distribution: uniform\n min: 0.0\n max: 1.0\n fliplr:\n distribution: uniform\n min: 0.0\n max: 1.0\n mosaic:\n distribution: uniform\n min: 0.0\n max: 1.0\n mixup:\n distribution: uniform\n min: 0.0\n max: 1.0\n copy_paste:\n distribution: uniform\n min: 0.0\n max: 1.0\n"
},
{
"path": "module/detect/utils/loggers/wandb/wandb_utils.py",
"content": "\"\"\"Utilities and tools for tracking runs with Weights & Biases.\"\"\"\n\nimport logging\nimport os\nimport sys\nfrom contextlib import contextmanager\nfrom pathlib import Path\nfrom typing import Dict\n\nimport yaml\nfrom tqdm import tqdm\n\nFILE = Path(__file__).resolve()\nROOT = FILE.parents[3] # YOLOv5 root directory\nif str(ROOT) not in sys.path:\n sys.path.append(str(ROOT)) # add ROOT to PATH\n\nfrom utils.dataloaders import LoadImagesAndLabels, img2label_paths\nfrom utils.general import LOGGER, check_dataset, check_file\n\ntry:\n import wandb\n\n assert hasattr(wandb, '__version__') # verify package import not local dir\nexcept (ImportError, AssertionError):\n wandb = None\n\nRANK = int(os.getenv('RANK', -1))\nWANDB_ARTIFACT_PREFIX = 'wandb-artifact://'\n\n\ndef remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):\n return from_string[len(prefix):]\n\n\ndef check_wandb_config_file(data_config_file):\n wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path\n if Path(wandb_config).is_file():\n return wandb_config\n return data_config_file\n\n\ndef check_wandb_dataset(data_file):\n is_trainset_wandb_artifact = False\n is_valset_wandb_artifact = False\n if check_file(data_file) and data_file.endswith('.yaml'):\n with open(data_file, errors='ignore') as f:\n data_dict = yaml.safe_load(f)\n is_trainset_wandb_artifact = isinstance(\n data_dict['train'],\n str\n ) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)\n is_valset_wandb_artifact = isinstance(\n data_dict['eval'],\n str\n ) and data_dict['eval'].startswith(WANDB_ARTIFACT_PREFIX)\n if is_trainset_wandb_artifact or is_valset_wandb_artifact:\n return data_dict\n else:\n return check_dataset(data_file)\n\n\ndef get_run_info(run_path):\n run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))\n run_id = run_path.stem\n project = run_path.parent.stem\n entity = run_path.parent.parent.stem\n model_artifact_name = 'run_' + run_id + '_model'\n return entity, project, run_id, model_artifact_name\n\n\ndef check_wandb_resume(opt):\n process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None\n if isinstance(opt.resume, str):\n if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):\n if RANK not in [-1, 0]: # For resuming DDP runs\n entity, project, run_id, model_artifact_name = get_run_info(opt.resume)\n api = wandb.Api()\n artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')\n modeldir = artifact.download()\n opt.weights = str(Path(modeldir) / \"last.pt\")\n return True\n return None\n\n\ndef process_wandb_config_ddp_mode(opt):\n with open(check_file(opt.data), errors='ignore') as f:\n data_dict = yaml.safe_load(f) # data dict\n train_dir, val_dir = None, None\n if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):\n api = wandb.Api()\n train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)\n train_dir = train_artifact.download()\n train_path = Path(train_dir) / 'data/images/'\n data_dict['train'] = str(train_path)\n\n if isinstance(data_dict['eval'], str) and data_dict['eval'].startswith(WANDB_ARTIFACT_PREFIX):\n api = wandb.Api()\n val_artifact = api.artifact(remove_prefix(data_dict['eval']) + ':' + opt.artifact_alias)\n val_dir = val_artifact.download()\n val_path = Path(val_dir) / 'data/images/'\n data_dict['eval'] = str(val_path)\n if train_dir or val_dir:\n ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')\n with open(ddp_data_path, 'w') as f:\n yaml.safe_dump(data_dict, f)\n opt.data = ddp_data_path\n\n\nclass WandbLogger():\n \"\"\"Log training runs, datasets, models, and predictions to Weights & Biases.\n\n This logger sends information to W&B at wandb.ai. By default, this information\n includes hyperparameters, system configuration and metrics, model metrics,\n and basic data metrics and analyses.\n\n By providing additional command line arguments to train.py, datasets,\n models and predictions can also be logged.\n\n For more on how this logger is used, see the Weights & Biases documentation:\n https://docs.wandb.com/guides/integrations/yolov5\n \"\"\"\n\n def __init__(self, opt, run_id=None, job_type='Training'):\n \"\"\"\n - Initialize WandbLogger instance\n - Upload dataset if opt.upload_dataset is True\n - Setup trainig processes if job_type is 'Training'\n\n arguments:\n opt (namespace) -- Commandline arguments for this run\n run_id (str) -- Run ID of W&B run to be resumed\n job_type (str) -- To set the job_type for this run\n\n \"\"\"\n # Pre-training routine --\n self.job_type = job_type\n self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run\n self.val_artifact, self.train_artifact = None, None\n self.train_artifact_path, self.val_artifact_path = None, None\n self.result_artifact = None\n self.val_table, self.result_table = None, None\n self.bbox_media_panel_images = []\n self.val_table_path_map = None\n self.max_imgs_to_log = 16\n self.wandb_artifact_data_dict = None\n self.data_dict = None\n # It's more elegant to stick to 1 wandb.init call,\n # but useful config data is overwritten in the WandbLogger's wandb.init call\n if isinstance(opt.resume, str): # checks resume from artifact\n if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):\n entity, project, run_id, model_artifact_name = get_run_info(opt.resume)\n model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name\n assert wandb, 'install wandb to resume wandb runs'\n # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config\n self.wandb_run = wandb.init(\n id=run_id,\n project=project,\n entity=entity,\n resume='allow',\n allow_val_change=True\n )\n opt.resume = model_artifact_name\n elif self.wandb:\n self.wandb_run = wandb.init(\n config=opt,\n resume=\"allow\",\n project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,\n entity=opt.entity,\n name=opt.name if opt.name != 'exp' else None,\n job_type=job_type,\n id=run_id,\n allow_val_change=True\n ) if not wandb.run else wandb.run\n if self.wandb_run:\n if self.job_type == 'Training':\n if opt.upload_dataset:\n if not opt.resume:\n self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)\n\n if opt.resume:\n # resume from artifact\n if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):\n self.data_dict = dict(self.wandb_run.config.data_dict)\n else: # local resume\n self.data_dict = check_wandb_dataset(opt.data)\n else:\n self.data_dict = check_wandb_dataset(opt.data)\n self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict\n\n # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.\n self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)\n self.setup_training(opt)\n\n if self.job_type == 'Dataset Creation':\n self.wandb_run.config.update({\"upload_dataset\": True})\n self.data_dict = self.check_and_upload_dataset(opt)\n\n def check_and_upload_dataset(self, opt):\n \"\"\"\n Check if the dataset format is compatible and upload it as W&B artifact\n\n arguments:\n opt (namespace)-- Commandline arguments for current run\n\n returns:\n Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.\n \"\"\"\n assert wandb, 'Install wandb to upload dataset'\n config_path = self.log_dataset_artifact(\n opt.data, opt.single_cls,\n 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem\n )\n with open(config_path, errors='ignore') as f:\n wandb_data_dict = yaml.safe_load(f)\n return wandb_data_dict\n\n def setup_training(self, opt):\n \"\"\"\n Setup the necessary processes for training YOLO models:\n - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX\n - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded\n - Setup log_dict, initialize bbox_interval\n\n arguments:\n opt (namespace) -- commandline arguments for this run\n\n \"\"\"\n self.log_dict, self.current_epoch = {}, 0\n self.bbox_interval = opt.bbox_interval\n if isinstance(opt.resume, str):\n modeldir, _ = self.download_model_artifact(opt)\n if modeldir:\n self.weights = Path(modeldir) / \"last.pt\"\n config = self.wandb_run.config\n opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(\n self.weights\n ), config.save_period, config.batch_size, config.bbox_interval, config.epochs, \\\n config.hyp, config.imgsz\n data_dict = self.data_dict\n if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download\n self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(\n data_dict.get('train'), opt.artifact_alias\n )\n self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(\n data_dict.get('eval'), opt.artifact_alias\n )\n\n if self.train_artifact_path is not None:\n train_path = Path(self.train_artifact_path) / 'data/images/'\n data_dict['train'] = str(train_path)\n if self.val_artifact_path is not None:\n val_path = Path(self.val_artifact_path) / 'data/images/'\n data_dict['eval'] = str(val_path)\n\n if self.val_artifact is not None:\n self.result_artifact = wandb.Artifact(\"run_\" + wandb.run.id + \"_progress\", \"evaluation\")\n columns = [\"epoch\", \"id\", \"ground truth\", \"prediction\"]\n columns.extend(self.data_dict['names'])\n self.result_table = wandb.Table(columns)\n self.val_table = self.val_artifact.get(\"eval\")\n if self.val_table_path_map is None:\n self.map_val_table_path()\n if opt.bbox_interval == -1:\n self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1\n if opt.evolve or opt.noplots:\n self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval\n train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None\n # Update the the data_dict to point to local artifacts dir\n if train_from_artifact:\n self.data_dict = data_dict\n\n def download_dataset_artifact(self, path, alias):\n \"\"\"\n download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX\n\n arguments:\n path -- path of the dataset to be used for training\n alias (str)-- alias of the artifact to be download/used for training\n\n returns:\n (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset\n is found otherwise returns (None, None)\n \"\"\"\n if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):\n artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + \":\" + alias)\n dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace(\"\\\\\", \"/\"))\n assert dataset_artifact is not None, \"'Error: W&B dataset artifact doesn\\'t exist'\"\n datadir = dataset_artifact.download()\n return datadir, dataset_artifact\n return None, None\n\n def download_model_artifact(self, opt):\n \"\"\"\n download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX\n\n arguments:\n opt (namespace) -- Commandline arguments for this run\n \"\"\"\n if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):\n model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + \":latest\")\n assert model_artifact is not None, 'Error: W&B model artifact doesn\\'t exist'\n modeldir = model_artifact.download()\n # epochs_trained = model_artifact.metadata.get('epochs_trained')\n total_epochs = model_artifact.metadata.get('total_epochs')\n is_finished = total_epochs is None\n assert not is_finished, 'training is finished, can only resume incomplete runs.'\n return modeldir, model_artifact\n return None, None\n\n def log_model(self, path, opt, epoch, fitness_score, best_model=False):\n \"\"\"\n Log the model checkpoint as W&B artifact\n\n arguments:\n path (Path) -- Path of directory containing the checkpoints\n opt (namespace) -- Command line arguments for this run\n epoch (int) -- Current epoch number\n fitness_score (float) -- fitness score for current epoch\n best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.\n \"\"\"\n model_artifact = wandb.Artifact(\n 'run_' + wandb.run.id + '_model',\n type='model',\n metadata={\n 'original_url': str(path),\n 'epochs_trained': epoch + 1,\n 'save period': opt.save_period,\n 'project': opt.project,\n 'total_epochs': opt.epochs,\n 'fitness_score': fitness_score}\n )\n model_artifact.add_file(str(path / 'last.pt'), name='last.pt')\n wandb.log_artifact(\n model_artifact,\n aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else '']\n )\n LOGGER.info(f\"Saving model artifact on epoch {epoch + 1}\")\n\n def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):\n \"\"\"\n Log the dataset as W&B artifact and return the new data file with W&B links\n\n arguments:\n data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.\n single_class (boolean) -- train multi-class data as single-class\n project (str) -- project name. Used to construct the artifact path\n overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new\n file with _wandb postfix. Eg -> data_wandb.yaml\n\n returns:\n the new .yaml file with artifact links. it can be used to start training directly from artifacts\n \"\"\"\n upload_dataset = self.wandb_run.config.upload_dataset\n log_val_only = isinstance(upload_dataset, str) and upload_dataset == 'eval'\n self.data_dict = check_dataset(data_file) # parse and check\n data = dict(self.data_dict)\n nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])\n names = {k: v for k, v in enumerate(names)} # to index dictionary\n\n # log train set\n if not log_val_only:\n self.train_artifact = self.create_dataset_table(\n LoadImagesAndLabels(data['train'], rect=True, batch_size=1),\n names,\n name='train'\n ) if data.get('train') else None\n if data.get('train'):\n data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')\n\n self.val_artifact = self.create_dataset_table(\n LoadImagesAndLabels(data['eval'], rect=True, batch_size=1), names, name='eval'\n ) if data.get('eval') else None\n if data.get('eval'):\n data['eval'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'eval')\n\n path = Path(data_file)\n # create a _wandb.yaml file with artifacts links if both train and test set are logged\n if not log_val_only:\n path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path\n path = ROOT / 'data' / path\n data.pop('download', None)\n data.pop('path', None)\n with open(path, 'w') as f:\n yaml.safe_dump(data, f)\n LOGGER.info(f\"Created dataset config file {path}\")\n\n if self.job_type == 'Training': # builds correct artifact pipeline graph\n if not log_val_only:\n self.wandb_run.log_artifact(\n self.train_artifact\n ) # calling use_artifact downloads the dataset. NOT NEEDED!\n self.wandb_run.use_artifact(self.val_artifact)\n self.val_artifact.wait()\n self.val_table = self.val_artifact.get('eval')\n self.map_val_table_path()\n else:\n self.wandb_run.log_artifact(self.train_artifact)\n self.wandb_run.log_artifact(self.val_artifact)\n return path\n\n def map_val_table_path(self):\n \"\"\"\n Map the validation dataset Table like name of file -> it's id in the W&B Table.\n Useful for - referencing artifacts for evaluation.\n \"\"\"\n self.val_table_path_map = {}\n LOGGER.info(\"Mapping dataset\")\n for i, data in enumerate(tqdm(self.val_table.data)):\n self.val_table_path_map[data[3]] = data[0]\n\n def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[int, str], name: str = 'dataset'):\n \"\"\"\n Create and return W&B artifact containing W&B Table of the dataset.\n\n arguments:\n dataset -- instance of LoadImagesAndLabels class used to iterate over the data to build Table\n class_to_id -- hash map that maps class ids to labels\n name -- name of the artifact\n\n returns:\n dataset artifact to be logged or used\n \"\"\"\n # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging\n artifact = wandb.Artifact(name=name, type=\"dataset\")\n img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None\n img_files = tqdm(dataset.im_files) if not img_files else img_files\n for img_file in img_files:\n if Path(img_file).is_dir():\n artifact.add_dir(img_file, name='data/images')\n labels_path = 'labels'.join(dataset.path.rsplit('images', 1))\n artifact.add_dir(labels_path, name='data/labels')\n else:\n artifact.add_file(img_file, name='data/images/' + Path(img_file).name)\n label_file = Path(img2label_paths([img_file])[0])\n artifact.add_file(\n str(label_file), name='data/labels/' +\n label_file.name\n ) if label_file.exists() else None\n table = wandb.Table(columns=[\"id\", \"train_image\", \"Classes\", \"name\"])\n class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])\n for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):\n box_data, img_classes = [], {}\n for cls, *xywh in labels[:, 1:].tolist():\n cls = int(cls)\n box_data.append(\n {\n \"position\": {\n \"middle\": [xywh[0], xywh[1]],\n \"width\": xywh[2],\n \"height\": xywh[3]},\n \"class_id\": cls,\n \"box_caption\": \"%s\" % (class_to_id[cls])}\n )\n img_classes[cls] = class_to_id[cls]\n boxes = {\"ground_truth\": {\"box_data\": box_data, \"class_labels\": class_to_id}} # inference-space\n table.add_data(\n si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),\n Path(paths).name\n )\n artifact.add(table, name)\n return artifact\n\n def log_training_progress(self, predn, path, names):\n \"\"\"\n Build evaluation Table. Uses reference from validation dataset table.\n\n arguments:\n predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]\n path (str): local path of the current evaluation image\n names (dict(int, str)): hash map that maps class ids to labels\n \"\"\"\n class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])\n box_data = []\n avg_conf_per_class = [0] * len(self.data_dict['names'])\n pred_class_count = {}\n for *xyxy, conf, cls in predn.tolist():\n if conf >= 0.25:\n cls = int(cls)\n box_data.append(\n {\n \"position\": {\n \"minX\": xyxy[0],\n \"minY\": xyxy[1],\n \"maxX\": xyxy[2],\n \"maxY\": xyxy[3]},\n \"class_id\": cls,\n \"box_caption\": f\"{names[cls]} {conf:.3f}\",\n \"scores\": {\n \"class_score\": conf},\n \"domain\": \"pixel\"}\n )\n avg_conf_per_class[cls] += conf\n\n if cls in pred_class_count:\n pred_class_count[cls] += 1\n else:\n pred_class_count[cls] = 1\n\n for pred_class in pred_class_count.keys():\n avg_conf_per_class[pred_class] = avg_conf_per_class[pred_class] / pred_class_count[pred_class]\n\n boxes = {\"predictions\": {\"box_data\": box_data, \"class_labels\": names}} # inference-space\n id = self.val_table_path_map[Path(path).name]\n self.result_table.add_data(\n self.current_epoch, id, self.val_table.data[id][1],\n wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),\n *avg_conf_per_class\n )\n\n def val_one_image(self, pred, predn, path, names, im):\n \"\"\"\n Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel\n\n arguments:\n pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]\n predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]\n path (str): local path of the current evaluation image\n \"\"\"\n if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact\n self.log_training_progress(predn, path, names)\n\n if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:\n if self.current_epoch % self.bbox_interval == 0:\n box_data = [{\n \"position\": {\n \"minX\": xyxy[0],\n \"minY\": xyxy[1],\n \"maxX\": xyxy[2],\n \"maxY\": xyxy[3]},\n \"class_id\": int(cls),\n \"box_caption\": f\"{names[int(cls)]} {conf:.3f}\",\n \"scores\": {\n \"class_score\": conf},\n \"domain\": \"pixel\"} for *xyxy, conf, cls in pred.tolist()]\n boxes = {\"predictions\": {\"box_data\": box_data, \"class_labels\": names}} # inference-space\n self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))\n\n def log(self, log_dict):\n \"\"\"\n save the metrics to the logging dictionary\n\n arguments:\n log_dict (Dict) -- metrics/media to be logged in current step\n \"\"\"\n if self.wandb_run:\n for key, value in log_dict.items():\n self.log_dict[key] = value\n\n def end_epoch(self, best_result=False):\n \"\"\"\n commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.\n\n arguments:\n best_result (boolean): Boolean representing if the result of this evaluation is best or not\n \"\"\"\n if self.wandb_run:\n with all_logging_disabled():\n if self.bbox_media_panel_images:\n self.log_dict[\"BoundingBoxDebugger\"] = self.bbox_media_panel_images\n try:\n wandb.log(self.log_dict)\n except BaseException as e:\n LOGGER.info(\n f\"An error occurred in wandb logger. The training will proceed without interruption. More info\\n{e}\"\n )\n self.wandb_run.finish()\n self.wandb_run = None\n\n self.log_dict = {}\n self.bbox_media_panel_images = []\n if self.result_artifact:\n self.result_artifact.add(self.result_table, 'result')\n wandb.log_artifact(\n self.result_artifact,\n aliases=[\n 'latest', 'last', 'epoch ' + str(self.current_epoch),\n ('best' if best_result else '')]\n )\n\n wandb.log({\"evaluation\": self.result_table})\n columns = [\"epoch\", \"id\", \"ground truth\", \"prediction\"]\n columns.extend(self.data_dict['names'])\n self.result_table = wandb.Table(columns)\n self.result_artifact = wandb.Artifact(\"run_\" + wandb.run.id + \"_progress\", \"evaluation\")\n\n def finish_run(self):\n \"\"\"\n Log metrics if any and finish the current W&B run\n \"\"\"\n if self.wandb_run:\n if self.log_dict:\n with all_logging_disabled():\n wandb.log(self.log_dict)\n wandb.run.finish()\n\n\n@contextmanager\ndef all_logging_disabled(highest_level=logging.CRITICAL):\n \"\"\" source - https://gist.github.com/simon-weber/7853144\n A context manager that will prevent any logging messages triggered during the body from being processed.\n :param highest_level: the maximum logging level in use.\n This would only need to be changed if a custom level greater than CRITICAL is defined.\n \"\"\"\n previous_level = logging.root.manager.disable\n logging.disable(highest_level)\n try:\n yield\n finally:\n logging.disable(previous_level)\n"
},
{
"path": "module/detect/utils/loss.py",
"content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nLoss functions\n\"\"\"\n\nimport torch\nimport torch.nn as nn\n\nfrom utils.metrics import bbox_iou\nfrom utils.torch_utils import de_parallel\n\n\ndef smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441\n # return positive, negative label smoothing BCE targets\n return 1.0 - 0.5 * eps, 0.5 * eps\n\n\nclass BCEBlurWithLogitsLoss(nn.Module):\n # BCEwithLogitLoss() with reduced missing label effects.\n def __init__(self, alpha=0.05):\n super().__init__()\n self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()\n self.alpha = alpha\n\n def forward(self, pred, true):\n loss = self.loss_fcn(pred, true)\n pred = torch.sigmoid(pred) # prob from logits\n dx = pred - true # reduce only missing label effects\n # dx = (pred - true).abs() # reduce missing label and false label effects\n alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))\n loss *= alpha_factor\n return loss.mean()\n\n\nclass FocalLoss(nn.Module):\n # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)\n def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):\n super().__init__()\n self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()\n self.gamma = gamma\n self.alpha = alpha\n self.reduction = loss_fcn.reduction\n self.loss_fcn.reduction = 'none' # required to apply FL to each element\n\n def forward(self, pred, true):\n loss = self.loss_fcn(pred, true)\n # p_t = torch.exp(-loss)\n # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability\n\n # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py\n pred_prob = torch.sigmoid(pred) # prob from logits\n p_t = true * pred_prob + (1 - true) * (1 - pred_prob)\n alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)\n modulating_factor = (1.0 - p_t) ** self.gamma\n loss *= alpha_factor * modulating_factor\n\n if self.reduction == 'mean':\n return loss.mean()\n elif self.reduction == 'sum':\n return loss.sum()\n else: # 'none'\n return loss\n\n\nclass QFocalLoss(nn.Module):\n # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)\n def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):\n super().__init__()\n self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()\n self.gamma = gamma\n self.alpha = alpha\n self.reduction = loss_fcn.reduction\n self.loss_fcn.reduction = 'none' # required to apply FL to each element\n\n def forward(self, pred, true):\n loss = self.loss_fcn(pred, true)\n\n pred_prob = torch.sigmoid(pred) # prob from logits\n alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)\n modulating_factor = torch.abs(true - pred_prob) ** self.gamma\n loss *= alpha_factor * modulating_factor\n\n if self.reduction == 'mean':\n return loss.mean()\n elif self.reduction == 'sum':\n return loss.sum()\n else: # 'none'\n return loss\n\n\nclass ComputeLoss:\n sort_obj_iou = False\n\n # Compute losses\n def __init__(self, model, autobalance=False):\n device = next(model.parameters()).device # get model device\n h = model.hyp # hyperparameters\n\n # Define criteria\n BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))\n BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))\n\n # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3\n self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets\n\n # Focal loss\n g = h['fl_gamma'] # focal loss gamma\n if g > 0:\n BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)\n\n m = de_parallel(model).model[-1] # Detect() module\n self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7\n self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index\n self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance\n self.na = m.na # number of anchors\n self.nc = m.nc # number of classes\n self.nl = m.nl # number of layers\n self.anchors = m.anchors\n self.device = device\n\n def __call__(self, p, targets): # predictions, targets\n lcls = torch.zeros(1, device=self.device) # class loss\n lbox = torch.zeros(1, device=self.device) # box loss\n lobj = torch.zeros(1, device=self.device) # object loss\n tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets\n\n # Losses\n for i, pi in enumerate(p): # layer index, layer predictions\n b, a, gj, gi = indices[i] # image, anchor, gridy, gridx\n tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj\n\n n = b.shape[0] # number of targets\n if n:\n # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0\n pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions\n\n # Regression\n pxy = pxy.sigmoid() * 2 - 0.5\n pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]\n pbox = torch.cat((pxy, pwh), 1) # predicted box\n iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)\n lbox += (1.0 - iou).mean() # iou loss\n\n # Objectness\n iou = iou.detach().clamp(0).type(tobj.dtype)\n if self.sort_obj_iou:\n j = iou.argsort()\n b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]\n if self.gr < 1:\n iou = (1.0 - self.gr) + self.gr * iou\n tobj[b, a, gj, gi] = iou # iou ratio\n\n # Classification\n if self.nc > 1: # cls loss (only if multiple classes)\n t = torch.full_like(pcls, self.cn, device=self.device) # targets\n t[range(n), tcls[i]] = self.cp\n lcls += self.BCEcls(pcls, t) # BCE\n\n # Append targets to text file\n # with open('targets.txt', 'a') as file:\n # [file.write('%11.5g ' * 4 % tuple(x) + '\\n') for x in torch.cat((txy[i], twh[i]), 1)]\n\n obji = self.BCEobj(pi[..., 4], tobj)\n lobj += obji * self.balance[i] # obj loss\n if self.autobalance:\n self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()\n\n if self.autobalance:\n self.balance = [x / self.balance[self.ssi] for x in self.balance]\n lbox *= self.hyp['box']\n lobj *= self.hyp['obj']\n lcls *= self.hyp['cls']\n bs = tobj.shape[0] # batch size\n\n return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()\n\n def build_targets(self, p, targets):\n # Build targets for compute_loss(), input targets(image,class,x,y,w,h)\n na, nt = self.na, targets.shape[0] # number of anchors, targets\n tcls, tbox, indices, anch = [], [], [], []\n gain = torch.ones(7, device=self.device) # normalized to gridspace gain\n ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)\n targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices\n\n g = 0.5 # bias\n off = torch.tensor(\n [\n [0, 0],\n [1, 0],\n [0, 1],\n [-1, 0],\n [0, -1], # j,k,l,m\n # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm\n ],\n device=self.device).float() * g # offsets\n\n for i in range(self.nl):\n anchors, shape = self.anchors[i], p[i].shape\n gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain\n\n # Match targets to anchors\n t = targets * gain # shape(3,n,7)\n if nt:\n # Matches\n r = t[..., 4:6] / anchors[:, None] # wh ratio\n j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare\n # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))\n t = t[j] # filter\n\n # Offsets\n gxy = t[:, 2:4] # grid xy\n gxi = gain[[2, 3]] - gxy # inverse\n j, k = ((gxy % 1 < g) & (gxy > 1)).T\n l, m = ((gxi % 1 < g) & (gxi > 1)).T\n j = torch.stack((torch.ones_like(j), j, k, l, m))\n t = t.repeat((5, 1, 1))[j]\n offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]\n else:\n t = targets[0]\n offsets = 0\n\n # Define\n bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors\n a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class\n gij = (gxy - offsets).long()\n gi, gj = gij.T # grid indices\n\n # Append\n indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid\n tbox.append(torch.cat((gxy - gij, gwh), 1)) # box\n anch.append(anchors[a]) # anchors\n tcls.append(c) # class\n\n return tcls, tbox, indices, anch\n"
},
{
"path": "module/detect/utils/metrics.py",
"content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nModel validation metrics\n\"\"\"\n\nimport math\nimport warnings\nfrom pathlib import Path\n\nimport matplotlib.pyplot as plt\nimport numpy as np\nimport torch\n\n\ndef fitness(x):\n # Model fitness as a weighted combination of metrics\n w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]\n return (x[:, :4] * w).sum(1)\n\n\ndef smooth(y, f=0.05):\n # Box filter of fraction f\n nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)\n p = np.ones(nf // 2) # ones padding\n yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded\n return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed\n\n\ndef ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16):\n \"\"\" Compute the average precision, given the recall and precision curves.\n Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.\n # Arguments\n tp: True positives (nparray, nx1 or nx10).\n conf: Objectness value from 0-1 (nparray).\n pred_cls: Predicted object classes (nparray).\n target_cls: True object classes (nparray).\n plot: Plot precision-recall curve at mAP@0.5\n save_dir: Plot save directory\n # Returns\n The average precision as computed in py-faster-rcnn.\n \"\"\"\n\n # Sort by objectness\n i = np.argsort(-conf)\n tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]\n\n # Find unique classes\n unique_classes, nt = np.unique(target_cls, return_counts=True)\n nc = unique_classes.shape[0] # number of classes, number of detections\n\n # Create Precision-Recall curve and compute AP for each class\n px, py = np.linspace(0, 1, 1000), [] # for plotting\n ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))\n for ci, c in enumerate(unique_classes):\n i = pred_cls == c\n n_l = nt[ci] # number of labels\n n_p = i.sum() # number of predictions\n if n_p == 0 or n_l == 0:\n continue\n\n # Accumulate FPs and TPs\n fpc = (1 - tp[i]).cumsum(0)\n tpc = tp[i].cumsum(0)\n\n # Recall\n recall = tpc / (n_l + eps) # recall curve\n r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases\n\n # Precision\n precision = tpc / (tpc + fpc) # precision curve\n p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score\n\n # AP from recall-precision curve\n for j in range(tp.shape[1]):\n ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])\n if plot and j == 0:\n py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5\n\n # Compute F1 (harmonic mean of precision and recall)\n f1 = 2 * p * r / (p + r + eps)\n names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data\n names = dict(enumerate(names)) # to dict\n if plot:\n plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)\n plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')\n plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')\n plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')\n\n i = smooth(f1.mean(0), 0.1).argmax() # max F1 index\n p, r, f1 = p[:, i], r[:, i], f1[:, i]\n tp = (r * nt).round() # true positives\n fp = (tp / (p + eps) - tp).round() # false positives\n return tp, fp, p, r, f1, ap, unique_classes.astype(int)\n\n\ndef compute_ap(recall, precision):\n \"\"\" Compute the average precision, given the recall and precision curves\n # Arguments\n recall: The recall curve (list)\n precision: The precision curve (list)\n # Returns\n Average precision, precision curve, recall curve\n \"\"\"\n\n # Append sentinel values to beginning and end\n mrec = np.concatenate(([0.0], recall, [1.0]))\n mpre = np.concatenate(([1.0], precision, [0.0]))\n\n # Compute the precision envelope\n mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))\n\n # Integrate area under curve\n method = 'interp' # methods: 'continuous', 'interp'\n if method == 'interp':\n x = np.linspace(0, 1, 101) # 101-point interp (COCO)\n ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate\n else: # 'continuous'\n i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes\n ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve\n\n return ap, mpre, mrec\n\n\nclass ConfusionMatrix:\n # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix\n def __init__(self, nc, conf=0.25, iou_thres=0.45):\n self.matrix = np.zeros((nc + 1, nc + 1))\n self.nc = nc # number of classes\n self.conf = conf\n self.iou_thres = iou_thres\n\n def process_batch(self, detections, labels):\n \"\"\"\n Return intersection-over-union (Jaccard index) of boxes.\n Both sets of boxes are expected to be in (x1, y1, x2, y2) format.\n Arguments:\n detections (Array[N, 6]), x1, y1, x2, y2, conf, class\n labels (Array[M, 5]), class, x1, y1, x2, y2\n Returns:\n None, updates confusion matrix accordingly\n \"\"\"\n detections = detections[detections[:, 4] > self.conf]\n gt_classes = labels[:, 0].int()\n detection_classes = detections[:, 5].int()\n iou = box_iou(labels[:, 1:], detections[:, :4])\n\n x = torch.where(iou > self.iou_thres)\n if x[0].shape[0]:\n matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()\n if x[0].shape[0] > 1:\n matches = matches[matches[:, 2].argsort()[::-1]]\n matches = matches[np.unique(matches[:, 1], return_index=True)[1]]\n matches = matches[matches[:, 2].argsort()[::-1]]\n matches = matches[np.unique(matches[:, 0], return_index=True)[1]]\n else:\n matches = np.zeros((0, 3))\n\n n = matches.shape[0] > 0\n m0, m1, _ = matches.transpose().astype(int)\n for i, gc in enumerate(gt_classes):\n j = m0 == i\n if n and sum(j) == 1:\n self.matrix[detection_classes[m1[j]], gc] += 1 # correct\n else:\n self.matrix[self.nc, gc] += 1 # background FP\n\n if n:\n for i, dc in enumerate(detection_classes):\n if not any(m1 == i):\n self.matrix[dc, self.nc] += 1 # background FN\n\n def matrix(self):\n return self.matrix\n\n def tp_fp(self):\n tp = self.matrix.diagonal() # true positives\n fp = self.matrix.sum(1) - tp # false positives\n # fn = self.matrix.sum(0) - tp # false negatives (missed detections)\n return tp[:-1], fp[:-1] # remove background class\n\n def plot(self, normalize=True, save_dir='', names=()):\n try:\n import seaborn as sn\n\n array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns\n array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)\n\n fig = plt.figure(figsize=(12, 9), tight_layout=True)\n nc, nn = self.nc, len(names) # number of classes, names\n sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size\n labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels\n with warnings.catch_warnings():\n warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered\n sn.heatmap(array,\n annot=nc < 30,\n annot_kws={\n \"size\": 8},\n cmap='Blues',\n fmt='.2f',\n square=True,\n vmin=0.0,\n xticklabels=names + ['background FP'] if labels else \"auto\",\n yticklabels=names + ['background FN'] if labels else \"auto\").set_facecolor((1, 1, 1))\n fig.axes[0].set_xlabel('True')\n fig.axes[0].set_ylabel('Predicted')\n fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)\n plt.close()\n except Exception as e:\n print(f'WARNING: ConfusionMatrix plot failure: {e}')\n\n def print(self):\n for i in range(self.nc + 1):\n print(' '.join(map(str, self.matrix[i])))\n\n\ndef bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):\n # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)\n\n # Get the coordinates of bounding boxes\n if xywh: # transform from xywh to xyxy\n (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)\n w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2\n b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_\n b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_\n else: # x1, y1, x2, y2 = box1\n b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)\n b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)\n w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1\n w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1\n\n # Intersection area\n inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \\\n (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)\n\n # Union Area\n union = w1 * h1 + w2 * h2 - inter + eps\n\n # IoU\n iou = inter / union\n if CIoU or DIoU or GIoU:\n cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width\n ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height\n if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1\n c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared\n rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2\n if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47\n v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)\n with torch.no_grad():\n alpha = v / (v - iou + (1 + eps))\n return iou - (rho2 / c2 + v * alpha) # CIoU\n return iou - rho2 / c2 # DIoU\n c_area = cw * ch + eps # convex area\n return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf\n return iou # IoU\n\n\ndef box_area(box):\n # box = xyxy(4,n)\n return (box[2] - box[0]) * (box[3] - box[1])\n\n\ndef box_iou(box1, box2, eps=1e-7):\n # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py\n \"\"\"\n Return intersection-over-union (Jaccard index) of boxes.\n Both sets of boxes are expected to be in (x1, y1, x2, y2) format.\n Arguments:\n box1 (Tensor[N, 4])\n box2 (Tensor[M, 4])\n Returns:\n iou (Tensor[N, M]): the NxM matrix containing the pairwise\n IoU values for every element in boxes1 and boxes2\n \"\"\"\n\n # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)\n (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)\n inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)\n\n # IoU = inter / (area1 + area2 - inter)\n return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)\n\n\ndef bbox_ioa(box1, box2, eps=1e-7):\n \"\"\" Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2\n box1: np.array of shape(4)\n box2: np.array of shape(nx4)\n returns: np.array of shape(n)\n \"\"\"\n\n # Get the coordinates of bounding boxes\n b1_x1, b1_y1, b1_x2, b1_y2 = box1\n b2_x1, b2_y1, b2_x2, b2_y2 = box2.T\n\n # Intersection area\n inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \\\n (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)\n\n # box2 area\n box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps\n\n # Intersection over box2 area\n return inter_area / box2_area\n\n\ndef wh_iou(wh1, wh2, eps=1e-7):\n # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2\n wh1 = wh1[:, None] # [N,1,2]\n wh2 = wh2[None] # [1,M,2]\n inter = torch.min(wh1, wh2).prod(2) # [N,M]\n return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)\n\n\n# Plots ----------------------------------------------------------------------------------------------------------------\n\n\ndef plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):\n # Precision-recall curve\n fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)\n py = np.stack(py, axis=1)\n\n if 0 < len(names) < 21: # display per-class legend if < 21 classes\n for i, y in enumerate(py.T):\n ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)\n else:\n ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)\n\n ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())\n ax.set_xlabel('Recall')\n ax.set_ylabel('Precision')\n ax.set_xlim(0, 1)\n ax.set_ylim(0, 1)\n plt.legend(bbox_to_anchor=(1.04, 1), loc=\"upper left\")\n fig.savefig(save_dir, dpi=250)\n plt.close()\n\n\ndef plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):\n # Metric-confidence curve\n fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)\n\n if 0 < len(names) < 21: # display per-class legend if < 21 classes\n for i, y in enumerate(py):\n ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)\n else:\n ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)\n\n y = smooth(py.mean(0), 0.05)\n ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')\n ax.set_xlabel(xlabel)\n ax.set_ylabel(ylabel)\n ax.set_xlim(0, 1)\n ax.set_ylim(0, 1)\n plt.legend(bbox_to_anchor=(1.04, 1), loc=\"upper left\")\n fig.savefig(save_dir, dpi=250)\n plt.close()\n"
},
{
"path": "module/detect/utils/plots.py",
"content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nPlotting utils\n\"\"\"\n\nimport math\nimport os\nfrom copy import copy\nfrom pathlib import Path\nfrom urllib.error import URLError\n\nimport cv2\nimport matplotlib\nimport matplotlib.pyplot as plt\nimport numpy as np\nimport pandas as pd\nimport seaborn as sn\nimport torch\nfrom PIL import Image, ImageDraw, ImageFont\nfrom utils.general import (CONFIG_DIR, FONT, LOGGER, Timeout, check_font, check_requirements, clip_coords,\n increment_path, is_ascii, threaded, try_except, xywh2xyxy, xyxy2xywh)\nfrom utils.metrics import fitness\n\n# Settings\nRANK = int(os.getenv('RANK', -1))\nmatplotlib.rc('font', **{'size': 11})\nmatplotlib.use('Agg') # for writing to files only\n\n\nclass Colors:\n # Ultralytics color palette https://ultralytics.com/\n def __init__(self):\n # hex = matplotlib.colors.TABLEAU_COLORS.values()\n hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',\n '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')\n self.palette = [self.hex2rgb(f'#{c}') for c in hexs]\n self.n = len(self.palette)\n\n def __call__(self, i, bgr=False):\n c = self.palette[int(i) % self.n]\n return (c[2], c[1], c[0]) if bgr else c\n\n @staticmethod\n def hex2rgb(h): # rgb order (PIL)\n return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))\n\n\ncolors = Colors() # create instance for 'from utils.plots import colors'\n\n\ndef check_pil_font(font=FONT, size=10):\n # Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary\n font = Path(font)\n font = font if font.exists() else (CONFIG_DIR / font.name)\n try:\n return ImageFont.truetype(str(font) if font.exists() else font.name, size)\n except Exception: # download if missing\n try:\n check_font(font)\n return ImageFont.truetype(str(font), size)\n except TypeError:\n check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374\n except URLError: # not online\n return ImageFont.load_default()\n\n\nclass Annotator:\n # YOLOv5 Annotator for train/eval mosaics and jpgs and detect/hub inference annotations\n def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):\n assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'\n non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic\n self.pil = pil or non_ascii\n if self.pil: # use PIL\n self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)\n self.draw = ImageDraw.Draw(self.im)\n self.font = check_pil_font(\n font='Arial.Unicode.ttf' if non_ascii else font,\n size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12)\n )\n else: # use cv2\n self.im = im\n self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width\n\n def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):\n # Add one xyxy box to image with label\n if self.pil or not is_ascii(label):\n self.draw.rectangle(box, width=self.lw, outline=color) # box\n if label:\n w, h = self.font.getsize(label) # text width, height\n outside = box[1] - h >= 0 # label fits outside box\n self.draw.rectangle(\n (box[0], box[1] - h if outside else box[1], box[0] + w + 1,\n box[1] + 1 if outside else box[1] + h + 1),\n fill=color,\n )\n # self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0\n self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)\n else: # cv2\n p1, p2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))\n cv2.rectangle(self.im, p1, p2, color, thickness=self.lw, lineType=cv2.LINE_AA)\n if label:\n tf = max(self.lw - 1, 1) # font thickness\n w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height\n outside = p1[1] - h >= 3\n p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3\n cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled\n cv2.putText(\n self.im,\n label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),\n 0,\n self.lw / 3,\n txt_color,\n thickness=tf,\n lineType=cv2.LINE_AA\n )\n\n def rectangle(self, xy, fill=None, outline=None, width=1):\n # Add rectangle to image (PIL-only)\n self.draw.rectangle(xy, fill, outline, width)\n\n def text(self, xy, text, txt_color=(255, 255, 255)):\n # Add text to image (PIL-only)\n w, h = self.font.getsize(text) # text width, height\n self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)\n\n def result(self):\n # Return annotated image as array\n return np.asarray(self.im)\n\n\ndef feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):\n \"\"\"\n x: Features to be visualized\n module_type: Module type\n stage: Module stage within model\n n: Maximum number of feature maps to plot\n save_dir: Directory to save results\n \"\"\"\n if 'Detect' not in module_type:\n batch, channels, height, width = x.shape # batch, channels, height, width\n if height > 1 and width > 1:\n f = save_dir / f\"stage{stage}_{module_type.split('.')[-1]}_features.png\" # filename\n\n blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels\n n = min(n, channels) # number of plots\n fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols\n ax = ax.ravel()\n plt.subplots_adjust(wspace=0.05, hspace=0.05)\n for i in range(n):\n ax[i].imshow(blocks[i].squeeze()) # cmap='gray'\n ax[i].axis('off')\n\n LOGGER.info(f'Saving {f}... ({n}/{channels})')\n plt.savefig(f, dpi=300, bbox_inches='tight')\n plt.close()\n np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save\n\n\ndef hist2d(x, y, n=100):\n # 2d histogram used in labels.png and evolve.png\n xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)\n hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))\n xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)\n yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)\n return np.log(hist[xidx, yidx])\n\n\ndef butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):\n from scipy.signal import butter, filtfilt\n\n # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy\n def butter_lowpass(cutoff, fs, order):\n nyq = 0.5 * fs\n normal_cutoff = cutoff / nyq\n return butter(order, normal_cutoff, btype='low', analog=False)\n\n b, a = butter_lowpass(cutoff, fs, order=order)\n return filtfilt(b, a, data) # forward-backward filter\n\n\ndef output_to_target(output):\n # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]\n targets = []\n for i, o in enumerate(output):\n for *box, conf, cls in o.cpu().numpy():\n targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])\n return np.array(targets)\n\n\n@threaded\ndef plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):\n # Plot image grid with labels\n if isinstance(images, torch.Tensor):\n images = images.cpu().float().numpy()\n if isinstance(targets, torch.Tensor):\n targets = targets.cpu().numpy()\n if np.max(images[0]) <= 1:\n images *= 255 # de-normalise (optional)\n bs, _, h, w = images.shape # batch size, _, height, width\n bs = min(bs, max_subplots) # limit plot images\n ns = np.ceil(bs ** 0.5) # number of subplots (square)\n\n # Build Image\n mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init\n for i, im in enumerate(images):\n if i == max_subplots: # if last batch has fewer images than we expect\n break\n x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin\n im = im.transpose(1, 2, 0)\n mosaic[y:y + h, x:x + w, :] = im\n\n # Resize (optional)\n scale = max_size / ns / max(h, w)\n if scale < 1:\n h = math.ceil(scale * h)\n w = math.ceil(scale * w)\n mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))\n\n # Annotate\n fs = int((h + w) * ns * 0.01) # font size\n annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)\n for i in range(i + 1):\n x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin\n annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders\n if paths:\n annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames\n if len(targets) > 0:\n ti = targets[targets[:, 0] == i] # image targets\n boxes = xywh2xyxy(ti[:, 2:6]).T\n classes = ti[:, 1].astype('int')\n labels = ti.shape[1] == 6 # labels if no conf column\n conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)\n\n if boxes.shape[1]:\n if boxes.max() <= 1.01: # if normalized with tolerance 0.01\n boxes[[0, 2]] *= w # scale to pixels\n boxes[[1, 3]] *= h\n elif scale < 1: # absolute coords need scale if image scales\n boxes *= scale\n boxes[[0, 2]] += x\n boxes[[1, 3]] += y\n for j, box in enumerate(boxes.T.tolist()):\n cls = classes[j]\n color = colors(cls)\n cls = names[cls] if names else cls\n if labels or conf[j] > 0.25: # 0.25 conf thresh\n label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'\n annotator.box_label(box, label, color=color)\n annotator.im.save(fname) # save\n\n\ndef plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):\n # Plot LR simulating training for full epochs\n optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals\n y = []\n for _ in range(epochs):\n scheduler.step()\n y.append(optimizer.param_groups[0]['lr'])\n plt.plot(y, '.-', label='LR')\n plt.xlabel('epoch')\n plt.ylabel('LR')\n plt.grid()\n plt.xlim(0, epochs)\n plt.ylim(0)\n plt.savefig(Path(save_dir) / 'LR.png', dpi=200)\n plt.close()\n\n\ndef plot_val_txt(): # from utils.plots import *; plot_val()\n # Plot eval.txt histograms\n x = np.loadtxt('eval.txt', dtype=np.float32)\n box = xyxy2xywh(x[:, :4])\n cx, cy = box[:, 0], box[:, 1]\n\n fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)\n ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)\n ax.set_aspect('equal')\n plt.savefig('hist2d.png', dpi=300)\n\n fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)\n ax[0].hist(cx, bins=600)\n ax[1].hist(cy, bins=600)\n plt.savefig('hist1d.png', dpi=200)\n\n\ndef plot_targets_txt(): # from utils.plots import *; plot_targets_txt()\n # Plot targets.txt histograms\n x = np.loadtxt('targets.txt', dtype=np.float32).T\n s = ['x targets', 'y targets', 'width targets', 'height targets']\n fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)\n ax = ax.ravel()\n for i in range(4):\n ax[i].hist(x[i], bins=100, label=f'{x[i].mean():.3g} +/- {x[i].std():.3g}')\n ax[i].legend()\n ax[i].set_title(s[i])\n plt.savefig('targets.jpg', dpi=200)\n\n\ndef plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_val_study()\n # Plot file=study.txt generated by eval.py (or plot all study*.txt in dir)\n save_dir = Path(file).parent if file else Path(dir)\n plot2 = False # plot additional results\n if plot2:\n ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()\n\n fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)\n # for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:\n for f in sorted(save_dir.glob('study*.txt')):\n y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T\n x = np.arange(y.shape[1]) if x is None else np.array(x)\n if plot2:\n s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']\n for i in range(7):\n ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)\n ax[i].set_title(s[i])\n\n j = y[3].argmax() + 1\n ax2.plot(\n y[5, 1:j],\n y[3, 1:j] * 1E2,\n '.-',\n linewidth=2,\n markersize=8,\n label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO')\n )\n\n ax2.plot(\n 1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],\n 'k.-',\n linewidth=2,\n markersize=8,\n alpha=.25,\n label='EfficientDet'\n )\n\n ax2.grid(alpha=0.2)\n ax2.set_yticks(np.arange(20, 60, 5))\n ax2.set_xlim(0, 57)\n ax2.set_ylim(25, 55)\n ax2.set_xlabel('GPU Speed (ms/img)')\n ax2.set_ylabel('COCO AP eval')\n ax2.legend(loc='lower right')\n f = save_dir / 'study.png'\n print(f'Saving {f}...')\n plt.savefig(f, dpi=300)\n\n\n@try_except # known issue https://github.com/ultralytics/yolov5/issues/5395\n@Timeout(30) # known issue https://github.com/ultralytics/yolov5/issues/5611\ndef plot_labels(labels, names=(), save_dir=Path('')):\n # plot dataset labels\n LOGGER.info(f\"Plotting labels to {save_dir / 'labels.jpg'}... \")\n c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes\n nc = int(c.max() + 1) # number of classes\n x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])\n\n # seaborn correlogram\n sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))\n plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)\n plt.close()\n\n # matplotlib labels\n matplotlib.use('svg') # faster\n ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()\n y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)\n try: # color histogram bars by class\n [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195\n except Exception:\n pass\n ax[0].set_ylabel('instances')\n if 0 < len(names) < 30:\n ax[0].set_xticks(range(len(names)))\n ax[0].set_xticklabels(names, rotation=90, fontsize=10)\n else:\n ax[0].set_xlabel('classes')\n sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)\n sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)\n\n # rectangles\n labels[:, 1:3] = 0.5 # center\n labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000\n img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)\n for cls, *box in labels[:1000]:\n ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot\n ax[1].imshow(img)\n ax[1].axis('off')\n\n for a in [0, 1, 2, 3]:\n for s in ['top', 'right', 'left', 'bottom']:\n ax[a].spines[s].set_visible(False)\n\n plt.savefig(save_dir / 'labels.jpg', dpi=200)\n matplotlib.use('Agg')\n plt.close()\n\n\ndef plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()\n # Plot evolve.csv hyp evolution results\n evolve_csv = Path(evolve_csv)\n data = pd.read_csv(evolve_csv)\n keys = [x.strip() for x in data.columns]\n x = data.values\n f = fitness(x)\n j = np.argmax(f) # max fitness index\n plt.figure(figsize=(10, 12), tight_layout=True)\n matplotlib.rc('font', **{'size': 8})\n print(f'Best results from row {j} of {evolve_csv}:')\n for i, k in enumerate(keys[7:]):\n v = x[:, 7 + i]\n mu = v[j] # best single result\n plt.subplot(6, 5, i + 1)\n plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')\n plt.plot(mu, f.max(), 'k+', markersize=15)\n plt.title(f'{k} = {mu:.3g}', fontdict={'size': 9}) # limit to 40 characters\n if i % 5 != 0:\n plt.yticks([])\n print(f'{k:>15}: {mu:.3g}')\n f = evolve_csv.with_suffix('.png') # filename\n plt.savefig(f, dpi=200)\n plt.close()\n print(f'Saved {f}')\n\n\ndef plot_results(file='path/to/results.csv', dir=''):\n # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')\n save_dir = Path(file).parent if file else Path(dir)\n fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)\n ax = ax.ravel()\n files = list(save_dir.glob('results*.csv'))\n assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'\n for f in files:\n try:\n data = pd.read_csv(f)\n s = [x.strip() for x in data.columns]\n x = data.values[:, 0]\n for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):\n y = data.values[:, j].astype('float')\n # y[y == 0] = np.nan # don't show zero values\n ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)\n ax[i].set_title(s[j], fontsize=12)\n # if j in [8, 9, 10]: # share train and eval loss y axes\n # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])\n except Exception as e:\n LOGGER.info(f'Warning: Plotting error for {f}: {e}')\n ax[1].legend()\n fig.savefig(save_dir / 'results.png', dpi=200)\n plt.close()\n\n\ndef profile_idetection(start=0, stop=0, labels=(), save_dir=''):\n # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()\n ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()\n s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']\n files = list(Path(save_dir).glob('frames*.txt'))\n for fi, f in enumerate(files):\n try:\n results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows\n n = results.shape[1] # number of rows\n x = np.arange(start, min(stop, n) if stop else n)\n results = results[:, x]\n t = (results[0] - results[0].min()) # set t0=0s\n results[0] = x\n for i, a in enumerate(ax):\n if i < len(results):\n label = labels[fi] if len(labels) else f.stem.replace('frames_', '')\n a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)\n a.set_title(s[i])\n a.set_xlabel('time (s)')\n # if fi == len(files) - 1:\n # a.set_ylim(bottom=0)\n for side in ['top', 'right']:\n a.spines[side].set_visible(False)\n else:\n a.remove()\n except Exception as e:\n print(f'Warning: Plotting error for {f}; {e}')\n ax[1].legend()\n plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)\n\n\ndef save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):\n # Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop\n xyxy = torch.tensor(xyxy).view(-1, 4)\n b = xyxy2xywh(xyxy) # boxes\n if square:\n b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square\n b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad\n xyxy = xywh2xyxy(b).long()\n clip_coords(xyxy, im.shape)\n crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]\n if save:\n file.parent.mkdir(parents=True, exist_ok=True) # make directory\n f = str(increment_path(file).with_suffix('.jpg'))\n # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue\n Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB\n return crop\n"
},
{
"path": "module/detect/utils/torch_utils.py",
"content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nPyTorch utils\n\"\"\"\n\nimport math\nimport os\nimport platform\nimport subprocess\nimport time\nimport warnings\nfrom contextlib import contextmanager\nfrom copy import deepcopy\nfrom pathlib import Path\n\nimport torch\nimport torch.distributed as dist\nimport torch.nn as nn\nimport torch.nn.functional as F\nfrom torch.nn.parallel import DistributedDataParallel as DDP\nfrom utils.general import LOGGER, check_version, colorstr, file_date, git_describe\n\nLOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html\nRANK = int(os.getenv('RANK', -1))\nWORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))\n\ntry:\n import thop # for FLOPs computation\nexcept ImportError:\n thop = None\n\n# Suppress PyTorch warnings\nwarnings.filterwarnings('ignore', message='User provided device_type of \\'cuda\\', but CUDA is not available. Disabling')\n\n\ndef smart_DDP(model):\n # Model DDP creation with checks\n assert not check_version(torch.__version__, '1.12.0', pinned=True), \\\n 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \\\n 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'\n if check_version(torch.__version__, '1.11.0'):\n return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)\n else:\n return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)\n\n\n@contextmanager\ndef torch_distributed_zero_first(local_rank: int):\n # Decorator to make all processes in distributed training wait for each local_master to do something\n if local_rank not in [-1, 0]:\n dist.barrier(device_ids=[local_rank])\n yield\n if local_rank == 0:\n dist.barrier(device_ids=[0])\n\n\ndef device_count():\n # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows\n assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'\n try:\n cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v \"\"' # Windows\n return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])\n except Exception:\n return 0\n\n\ndef select_device(device='', batch_size=0, newline=True):\n # device = None or 'cpu' or 0 or '0' or '0,1,2,3'\n s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '\n device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'\n cpu = device == 'cpu'\n mps = device == 'mps' # Apple Metal Performance Shaders (MPS)\n if cpu or mps:\n os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False\n elif device: # non-cpu device requested\n os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()\n assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \\\n f\"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)\"\n\n if not (cpu or mps) and torch.cuda.is_available(): # prefer GPU if available\n devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7\n n = len(devices) # device count\n if n > 1 and batch_size > 0: # check batch_size is divisible by device_count\n assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'\n space = ' ' * (len(s) + 1)\n for i, d in enumerate(devices):\n p = torch.cuda.get_device_properties(i)\n s += f\"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\\n\" # bytes to MB\n arg = 'cuda:0'\n elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available\n s += 'MPS\\n'\n arg = 'mps'\n else: # revert to CPU\n s += 'CPU\\n'\n arg = 'cpu'\n\n if not newline:\n s = s.rstrip()\n LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe\n return torch.device(arg)\n\n\ndef time_sync():\n # PyTorch-accurate time\n if torch.cuda.is_available():\n torch.cuda.synchronize()\n return time.time()\n\n\ndef profile(input, ops, n=10, device=None):\n # YOLOv5 speed/memory/FLOPs profiler\n #\n # Usage:\n # input = torch.randn(16, 3, 640, 640)\n # m1 = lambda x: x * torch.sigmoid(x)\n # m2 = nn.SiLU()\n # profile(input, [m1, m2], n=100) # profile over 100 iterations\n\n results = []\n if not isinstance(device, torch.device):\n device = select_device(device)\n print(\n f\"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}\"\n f\"{'input':>24s}{'output':>24s}\"\n )\n\n for x in input if isinstance(input, list) else [input]:\n x = x.to(device)\n x.requires_grad = True\n for m in ops if isinstance(ops, list) else [ops]:\n m = m.to(device) if hasattr(m, 'to') else m # device\n m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m\n tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward\n try:\n flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs\n except Exception:\n flops = 0\n\n try:\n for _ in range(n):\n t[0] = time_sync()\n y = m(x)\n t[1] = time_sync()\n try:\n _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()\n t[2] = time_sync()\n except Exception: # no backward method\n # print(e) # for debug\n t[2] = float('nan')\n tf += (t[1] - t[0]) * 1000 / n # ms per op forward\n tb += (t[2] - t[1]) * 1000 / n # ms per op backward\n mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)\n s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes\n p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters\n print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')\n results.append([p, flops, mem, tf, tb, s_in, s_out])\n except Exception as e:\n print(e)\n results.append(None)\n torch.cuda.empty_cache()\n return results\n\n\ndef is_parallel(model):\n # Returns True if model is of type DP or DDP\n return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)\n\n\ndef de_parallel(model):\n # De-parallelize a model: returns single-GPU model if model is of type DP or DDP\n return model.module if is_parallel(model) else model\n\n\ndef initialize_weights(model):\n for m in model.modules():\n t = type(m)\n if t is nn.Conv2d:\n pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')\n elif t is nn.BatchNorm2d:\n m.eps = 1e-3\n m.momentum = 0.03\n elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:\n m.inplace = True\n\n\ndef find_modules(model, mclass=nn.Conv2d):\n # Finds layer indices matching module class 'mclass'\n return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]\n\n\ndef sparsity(model):\n # Return global model sparsity\n a, b = 0, 0\n for p in model.parameters():\n a += p.numel()\n b += (p == 0).sum()\n return b / a\n\n\ndef prune(model, amount=0.3):\n # Prune model to requested global sparsity\n import torch.nn.utils.prune as prune\n print('Pruning model... ', end='')\n for name, m in model.named_modules():\n if isinstance(m, nn.Conv2d):\n prune.l1_unstructured(m, name='weight', amount=amount) # prune\n prune.remove(m, 'weight') # make permanent\n print(' %.3g global sparsity' % sparsity(model))\n\n\ndef fuse_conv_and_bn(conv, bn):\n # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/\n fusedconv = nn.Conv2d(\n conv.in_channels,\n conv.out_channels,\n kernel_size=conv.kernel_size,\n stride=conv.stride,\n padding=conv.padding,\n groups=conv.groups,\n bias=True\n ).requires_grad_(False).to(conv.weight.device)\n\n # Prepare filters\n w_conv = conv.weight.clone().view(conv.out_channels, -1)\n w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))\n fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))\n\n # Prepare spatial bias\n b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias\n b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))\n fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)\n\n return fusedconv\n\n\ndef model_info(model, verbose=False, img_size=640):\n # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]\n n_p = sum(x.numel() for x in model.parameters()) # number parameters\n n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients\n if verbose:\n print(f\"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}\")\n for i, (name, p) in enumerate(model.named_parameters()):\n name = name.replace('module_list.', '')\n print(\n '%5g %40s %9s %12g %20s %10.3g %10.3g' %\n (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std())\n )\n\n try: # FLOPs\n from thop import profile\n stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32\n img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input\n flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs\n img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float\n fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs\n except Exception:\n fs = ''\n\n name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'\n LOGGER.info(f\"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}\")\n\n\ndef scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)\n # Scales img(bs,3,y,x) by ratio constrained to gs-multiple\n if ratio == 1.0:\n return img\n h, w = img.shape[2:]\n s = (int(h * ratio), int(w * ratio)) # new size\n img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize\n if not same_shape: # pad/crop img\n h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))\n return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean\n\n\ndef copy_attr(a, b, include=(), exclude=()):\n # Copy attributes from b to a, options to only include [...] and to exclude [...]\n for k, v in b.__dict__.items():\n if (len(include) and k not in include) or k.startswith('_') or k in exclude:\n continue\n else:\n setattr(a, k, v)\n\n\ndef smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, weight_decay=1e-5):\n # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay\n g = [], [], [] # optimizer parameter groups\n bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()\n for v in model.modules():\n if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)\n g[2].append(v.bias)\n if isinstance(v, bn): # weight (no decay)\n g[1].append(v.weight)\n elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)\n g[0].append(v.weight)\n\n if name == 'Adam':\n optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum\n elif name == 'AdamW':\n optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)\n elif name == 'RMSProp':\n optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)\n elif name == 'SGD':\n optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)\n else:\n raise NotImplementedError(f'Optimizer {name} not implemented.')\n\n optimizer.add_param_group({'params': g[0], 'weight_decay': weight_decay}) # add g0 with weight_decay\n optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)\n LOGGER.info(\n f\"{colorstr('optimizer:')} {type(optimizer).__name__} with parameter groups \"\n f\"{len(g[1])} weight (no decay), {len(g[0])} weight, {len(g[2])} bias\"\n )\n return optimizer\n\n\nclass EarlyStopping:\n # YOLOv5 simple early stopper\n def __init__(self, patience=30):\n self.best_fitness = 0.0 # i.e. mAP\n self.best_epoch = 0\n self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop\n self.possible_stop = False # possible stop may occur next epoch\n\n def __call__(self, epoch, fitness):\n if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training\n self.best_epoch = epoch\n self.best_fitness = fitness\n delta = epoch - self.best_epoch # epochs without improvement\n self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch\n stop = delta >= self.patience # stop training if patience exceeded\n if stop:\n LOGGER.info(\n f'Stopping training early as no improvement observed in last {self.patience} epochs. '\n f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\\n'\n f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '\n f'i.e. `python trainfd.py --patience 300` or use `--patience 0` to disable EarlyStopping.'\n )\n return stop\n\n\nclass ModelEMA:\n \"\"\" Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models\n Keeps a moving average of everything in the model state_dict (parameters and buffers)\n For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage\n \"\"\"\n\n def __init__(self, model, decay=0.9999, tau=2000, updates=0):\n # Create EMA\n self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA\n # if next(model.parameters()).device.type != 'cpu':\n # self.ema.half() # FP16 EMA\n self.updates = updates # number of EMA updates\n self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)\n for p in self.ema.parameters():\n p.requires_grad_(False)\n\n def update(self, model):\n # Update EMA parameters\n with torch.no_grad():\n self.updates += 1\n d = self.decay(self.updates)\n\n msd = de_parallel(model).state_dict() # model state_dict\n for k, v in self.ema.state_dict().items():\n if v.dtype.is_floating_point:\n v *= d\n v += (1 - d) * msd[k].detach()\n\n def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):\n # Update EMA attributes\n copy_attr(self.ema, model, include, exclude)\n"
},
{
"path": "module/fuse/__init__.py",
"content": ""
},
{
"path": "module/fuse/discriminator.py",
"content": "from torch import nn, Tensor\n\n\nclass Discriminator(nn.Module):\n \"\"\"\n Use to discriminate fused images and source images.\n \"\"\"\n\n def __init__(self, dim: int = 32, size: tuple[int, int] = (224, 224)):\n super(Discriminator, self).__init__()\n\n self.conv = nn.Sequential(\n nn.Sequential(\n nn.Conv2d(1, dim, (3, 3), (2, 2), 1),\n nn.LeakyReLU(0.2, True),\n ),\n nn.Sequential(\n nn.Conv2d(dim, dim * 2, (3, 3), (2, 2), 1),\n nn.LeakyReLU(0.2, True),\n ),\n nn.Sequential(\n nn.Conv2d(dim * 2, dim * 4, (3, 3), (2, 2), 1),\n nn.LeakyReLU(0.2, True),\n ),\n )\n\n self.flatten = nn.Flatten()\n self.linear = nn.Linear((size[0] // 8) * (size[1] // 8) * 4 * dim, 1)\n\n def forward(self, x: Tensor) -> Tensor:\n x = self.conv(x)\n x = self.flatten(x)\n x = self.linear(x)\n return x\n"
},
{
"path": "module/fuse/generator.py",
"content": "import torch\nimport torch.nn as nn\nfrom torch import Tensor\n\n\nclass Generator(nn.Module):\n r\"\"\"\n Use to generate fused images.\n ir + vi -> fus\n \"\"\"\n\n def __init__(self, dim: int = 32, depth: int = 3):\n super(Generator, self).__init__()\n self.depth = depth\n\n self.encoder = nn.Sequential(\n nn.Conv2d(2, dim, (3, 3), (1, 1), 1),\n nn.BatchNorm2d(dim),\n nn.ReLU()\n )\n\n self.dense = nn.ModuleList([\n nn.Sequential(\n nn.Conv2d(dim * (i + 1), dim, (3, 3), (1, 1), 1),\n nn.BatchNorm2d(dim),\n nn.ReLU()\n ) for i in range(depth)\n ])\n\n self.fuse = nn.Sequential(\n nn.Sequential(\n nn.Conv2d(dim * (depth + 1), dim * 4, (3, 3), (1, 1), 1),\n nn.ReLU()\n ),\n nn.Sequential(\n nn.Conv2d(dim * 4, dim * 2, (3, 3), (1, 1), 1),\n nn.BatchNorm2d(dim * 2),\n nn.ReLU()\n ),\n nn.Sequential(\n nn.Conv2d(dim * 2, dim, (3, 3), (1, 1), 1),\n nn.BatchNorm2d(dim),\n nn.ReLU()\n ),\n nn.Sequential(\n nn.Conv2d(dim, 1, (3, 3), (1, 1), 1),\n nn.Tanh()\n ),\n )\n\n def forward(self, ir: Tensor, vi: Tensor) -> Tensor:\n src = torch.cat([ir, vi], dim=1)\n x = self.encoder(src)\n for i in range(self.depth):\n t = self.dense[i](x)\n x = torch.cat([x, t], dim=1)\n fus = self.fuse(x)\n return fus\n"
},
{
"path": "module/saliency/__init__.py",
"content": ""
},
{
"path": "module/saliency/u2net.py",
"content": "import torch\nimport torch.nn as nn\nimport torch.nn.functional as F\n\n\n# U^2-Net: Going Deeper with Nested U-Structure for Salient Object Detection.\n# Author: Xuebin Qin, Zichen Zhang, Chenyang Huang et al.\n# Code Reference: https://github.com/xuebinqin/U-2-Net/blob/master/model/u2net.py\n\nclass REBNCONV(nn.Module):\n def __init__(self, in_ch=3, out_ch=3, dirate=1):\n super(REBNCONV, self).__init__()\n\n self.conv_s1 = nn.Conv2d(in_ch, out_ch, 3, padding=1 * dirate, dilation=1 * dirate)\n self.bn_s1 = nn.BatchNorm2d(out_ch)\n self.relu_s1 = nn.ReLU(inplace=True)\n\n def forward(self, x):\n hx = x\n xout = self.relu_s1(self.bn_s1(self.conv_s1(hx)))\n\n return xout\n\n\n## upsample tensor 'src' to have the same spatial size with tensor 'tar'\ndef _upsample_like(src, tar):\n src = nn.functional.interpolate(src, size=tar.shape[2:], mode='bilinear')\n return src\n\n\n### RSU-7 ###\nclass RSU7(nn.Module): # UNet07DRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU7, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool5 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv6 = REBNCONV(mid_ch, mid_ch, dirate=1)\n\n self.rebnconv7 = REBNCONV(mid_ch, mid_ch, dirate=2)\n\n self.rebnconv6d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv5d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx = self.pool1(hx1)\n\n hx2 = self.rebnconv2(hx)\n hx = self.pool2(hx2)\n\n hx3 = self.rebnconv3(hx)\n hx = self.pool3(hx3)\n\n hx4 = self.rebnconv4(hx)\n hx = self.pool4(hx4)\n\n hx5 = self.rebnconv5(hx)\n hx = self.pool5(hx5)\n\n hx6 = self.rebnconv6(hx)\n\n hx7 = self.rebnconv7(hx6)\n\n hx6d = self.rebnconv6d(torch.cat((hx7, hx6), 1))\n hx6dup = _upsample_like(hx6d, hx5)\n\n hx5d = self.rebnconv5d(torch.cat((hx6dup, hx5), 1))\n hx5dup = _upsample_like(hx5d, hx4)\n\n hx4d = self.rebnconv4d(torch.cat((hx5dup, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))\n\n return hx1d + hxin\n\n\n### RSU-6 ###\nclass RSU6(nn.Module): # UNet06DRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU6, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=1)\n\n self.rebnconv6 = REBNCONV(mid_ch, mid_ch, dirate=2)\n\n self.rebnconv5d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx = self.pool1(hx1)\n\n hx2 = self.rebnconv2(hx)\n hx = self.pool2(hx2)\n\n hx3 = self.rebnconv3(hx)\n hx = self.pool3(hx3)\n\n hx4 = self.rebnconv4(hx)\n hx = self.pool4(hx4)\n\n hx5 = self.rebnconv5(hx)\n\n hx6 = self.rebnconv6(hx5)\n\n hx5d = self.rebnconv5d(torch.cat((hx6, hx5), 1))\n hx5dup = _upsample_like(hx5d, hx4)\n\n hx4d = self.rebnconv4d(torch.cat((hx5dup, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))\n\n return hx1d + hxin\n\n\n### RSU-5 ###\nclass RSU5(nn.Module): # UNet05DRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU5, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)\n\n self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=2)\n\n self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx = self.pool1(hx1)\n\n hx2 = self.rebnconv2(hx)\n hx = self.pool2(hx2)\n\n hx3 = self.rebnconv3(hx)\n hx = self.pool3(hx3)\n\n hx4 = self.rebnconv4(hx)\n\n hx5 = self.rebnconv5(hx4)\n\n hx4d = self.rebnconv4d(torch.cat((hx5, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))\n\n return hx1d + hxin\n\n\n### RSU-4 ###\nclass RSU4(nn.Module): # UNet04DRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU4, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=2)\n\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx = self.pool1(hx1)\n\n hx2 = self.rebnconv2(hx)\n hx = self.pool2(hx2)\n\n hx3 = self.rebnconv3(hx)\n\n hx4 = self.rebnconv4(hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))\n\n return hx1d + hxin\n\n\n### RSU-4F ###\nclass RSU4F(nn.Module): # UNet04FRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU4F, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=2)\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=4)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=8)\n\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=4)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=2)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx2 = self.rebnconv2(hx1)\n hx3 = self.rebnconv3(hx2)\n\n hx4 = self.rebnconv4(hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4, hx3), 1))\n hx2d = self.rebnconv2d(torch.cat((hx3d, hx2), 1))\n hx1d = self.rebnconv1d(torch.cat((hx2d, hx1), 1))\n\n return hx1d + hxin\n\n\n##### U^2-Net ####\nclass U2NET(nn.Module):\n\n def __init__(self, in_ch=3, out_ch=1):\n super(U2NET, self).__init__()\n\n self.stage1 = RSU7(in_ch, 32, 64)\n self.pool12 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage2 = RSU6(64, 32, 128)\n self.pool23 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage3 = RSU5(128, 64, 256)\n self.pool34 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage4 = RSU4(256, 128, 512)\n self.pool45 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage5 = RSU4F(512, 256, 512)\n self.pool56 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage6 = RSU4F(512, 256, 512)\n\n # decoder\n self.stage5d = RSU4F(1024, 256, 512)\n self.stage4d = RSU4(1024, 128, 256)\n self.stage3d = RSU5(512, 64, 128)\n self.stage2d = RSU6(256, 32, 64)\n self.stage1d = RSU7(128, 16, 64)\n\n self.side1 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side2 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side3 = nn.Conv2d(128, out_ch, 3, padding=1)\n self.side4 = nn.Conv2d(256, out_ch, 3, padding=1)\n self.side5 = nn.Conv2d(512, out_ch, 3, padding=1)\n self.side6 = nn.Conv2d(512, out_ch, 3, padding=1)\n\n self.outconv = nn.Conv2d(6 * out_ch, out_ch, 1)\n\n def forward(self, x):\n hx = x\n\n # stage 1\n hx1 = self.stage1(hx)\n hx = self.pool12(hx1)\n\n # stage 2\n hx2 = self.stage2(hx)\n hx = self.pool23(hx2)\n\n # stage 3\n hx3 = self.stage3(hx)\n hx = self.pool34(hx3)\n\n # stage 4\n hx4 = self.stage4(hx)\n hx = self.pool45(hx4)\n\n # stage 5\n hx5 = self.stage5(hx)\n hx = self.pool56(hx5)\n\n # stage 6\n hx6 = self.stage6(hx)\n hx6up = _upsample_like(hx6, hx5)\n\n # -------------------- decoder --------------------\n hx5d = self.stage5d(torch.cat((hx6up, hx5), 1))\n hx5dup = _upsample_like(hx5d, hx4)\n\n hx4d = self.stage4d(torch.cat((hx5dup, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.stage3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.stage2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.stage1d(torch.cat((hx2dup, hx1), 1))\n\n # side output\n d1 = self.side1(hx1d)\n\n d2 = self.side2(hx2d)\n d2 = _upsample_like(d2, d1)\n\n d3 = self.side3(hx3d)\n d3 = _upsample_like(d3, d1)\n\n d4 = self.side4(hx4d)\n d4 = _upsample_like(d4, d1)\n\n d5 = self.side5(hx5d)\n d5 = _upsample_like(d5, d1)\n\n d6 = self.side6(hx6)\n d6 = _upsample_like(d6, d1)\n\n d0 = self.outconv(torch.cat((d1, d2, d3, d4, d5, d6), 1))\n\n return [torch.sigmoid(x) for x in [d0, d1, d2, d3, d4, d5, d6]]\n\n\n### U^2-Net small ###\nclass U2NETP(nn.Module):\n\n def __init__(self, in_ch=3, out_ch=1):\n super(U2NETP, self).__init__()\n\n self.stage1 = RSU7(in_ch, 16, 64)\n self.pool12 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage2 = RSU6(64, 16, 64)\n self.pool23 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage3 = RSU5(64, 16, 64)\n self.pool34 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage4 = RSU4(64, 16, 64)\n self.pool45 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage5 = RSU4F(64, 16, 64)\n self.pool56 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage6 = RSU4F(64, 16, 64)\n\n # decoder\n self.stage5d = RSU4F(128, 16, 64)\n self.stage4d = RSU4(128, 16, 64)\n self.stage3d = RSU5(128, 16, 64)\n self.stage2d = RSU6(128, 16, 64)\n self.stage1d = RSU7(128, 16, 64)\n\n self.side1 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side2 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side3 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side4 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side5 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side6 = nn.Conv2d(64, out_ch, 3, padding=1)\n\n self.outconv = nn.Conv2d(6 * out_ch, out_ch, 1)\n\n def forward(self, x):\n hx = x\n\n # stage 1\n hx1 = self.stage1(hx)\n hx = self.pool12(hx1)\n\n # stage 2\n hx2 = self.stage2(hx)\n hx = self.pool23(hx2)\n\n # stage 3\n hx3 = self.stage3(hx)\n hx = self.pool34(hx3)\n\n # stage 4\n hx4 = self.stage4(hx)\n hx = self.pool45(hx4)\n\n # stage 5\n hx5 = self.stage5(hx)\n hx = self.pool56(hx5)\n\n # stage 6\n hx6 = self.stage6(hx)\n hx6up = _upsample_like(hx6, hx5)\n\n # decoder\n hx5d = self.stage5d(torch.cat((hx6up, hx5), 1))\n hx5dup = _upsample_like(hx5d, hx4)\n\n hx4d = self.stage4d(torch.cat((hx5dup, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.stage3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.stage2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.stage1d(torch.cat((hx2dup, hx1), 1))\n\n # side output\n d1 = self.side1(hx1d)\n\n d2 = self.side2(hx2d)\n d2 = _upsample_like(d2, d1)\n\n d3 = self.side3(hx3d)\n d3 = _upsample_like(d3, d1)\n\n d4 = self.side4(hx4d)\n d4 = _upsample_like(d4, d1)\n\n d5 = self.side5(hx5d)\n d5 = _upsample_like(d5, d1)\n\n d6 = self.side6(hx6)\n d6 = _upsample_like(d6, d1)\n\n d0 = self.outconv(torch.cat((d1, d2, d3, d4, d5, d6), 1))\n\n return [torch.sigmoid(x) for x in [d0, d1, d2, d3, d4, d5, d6]]\n"
},
{
"path": "pipeline/__init__.py",
"content": ""
},
{
"path": "pipeline/detect.py",
"content": "import logging\nimport sys\nfrom pathlib import Path\nfrom typing import Literal, List, Tuple\n\nimport numpy\nimport torch\nimport torch.backends.cudnn\nfrom numpy import number\nfrom torch import Tensor, nn\nfrom torchvision.ops import box_convert\nfrom torchvision.utils import draw_bounding_boxes\n\nfrom functions.get_param_groups import get_param_groups\nfrom module.detect.models.common import Conv\nfrom module.detect.models.yolo import Model\nfrom module.detect.utils.general import labels_to_class_weights, non_max_suppression\nfrom module.detect.utils.loss import ComputeLoss\nfrom module.detect.utils.metrics import box_iou\n\n\nclass Detect:\n r\"\"\"\n Init detect pipeline to detect objects from fused images.\n \"\"\"\n\n def __init__(self, config, mode: Literal['train', 'inference'], nc: int, classes: List[str], labels: List[Tensor]):\n # attach hyper parameters\n self.config = config\n self.mode = mode # fuse computation mode: train(grad+graph), eval(graph), inference(x)\n\n # init device\n device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')\n logging.info(f'deploy {config.detect.model} on device {str(device)}')\n self.device = device\n\n # init yolo model\n model_t = config.detect.model\n config_p = Path(__file__).parents[1] / 'module' / 'detect' / 'models' / f'{model_t}.yaml'\n net = Model(cfg=config_p, ch=config.detect.channels, nc=nc).to(self.device)\n logging.info(f'init {model_t} with (nc: {nc})')\n self.net = net\n\n # init hyperparameters\n hyp = config.loss.detect\n nl = net.model[-1].nl # number of detection layers\n\n # model parameters\n hyp['box'] *= 3 / nl # scale to layers\n hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers\n hyp['obj'] *= (config.train.image_size[0] / 640) ** 2 * 3 / nl # scale to image size and layers\n hyp['label_smoothing'] = False # label smoothing\n\n # attach constants\n net.nc = nc # attach number of classes to model\n net.hyp = hyp # attach hyper parameters to model\n net.class_weights = labels_to_class_weights(labels, nc).to(self.device) # attach class weights\n net.names = classes\n\n # load pretrained parameters (optional)\n d_ckpt = config.detect.pretrained\n if d_ckpt is not None:\n if 'http' in d_ckpt:\n ckpt_p = Path.cwd() / 'weights' / 'v1' / 'tardal.pth'\n url = d_ckpt\n logging.info(f'download pretrained parameters from {url}')\n try:\n ckpt = torch.hub.load_state_dict_from_url(url, model_dir=ckpt_p.parent, map_location='cpu')\n except Exception as err:\n logging.fatal(f'connect to {url} failed: {err}, try download pretrained weights manually')\n sys.exit(1)\n else:\n ckpt = torch.load(d_ckpt, map_location='cpu')\n self.load_ckpt(ckpt)\n\n # criterion (reference: YOLOv5 official)\n self.loss = ComputeLoss(net)\n\n def load_ckpt(self, ckpt: dict):\n ckpt = ckpt if 'detect' not in ckpt else ckpt['detect']\n self.net.load_state_dict(ckpt)\n\n def load_ckpt_fuse(self, ckpt: dict):\n ckpt = ckpt if 'detect' not in ckpt else ckpt['detect']\n # fuse conv & bn\n self.net.fuse()\n # compatibility updates\n for m in self.net.modules():\n t = type(m)\n if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):\n m.inplace = True # torch 1.7.0 compatibility\n if t is Detect and not isinstance(m.anchor_grid, list):\n delattr(m, 'anchor_grid')\n setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)\n elif t is Conv:\n m._non_persistent_buffers_set = set() # torch 1.6.0 compatibility\n elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):\n m.recompute_scale_factor = None # torch 1.11.0 compatibility\n # return as expect\n self.net.load_state_dict(ckpt)\n\n def save_ckpt(self) -> dict:\n ckpt = {'detect': self.net.state_dict()}\n return ckpt\n\n def forward(self, imgs: Tensor) -> Tensor:\n self.net.train()\n pred = self.net(imgs)\n return pred\n\n @torch.no_grad()\n def eval(self, imgs: Tensor, targets: Tensor, stats: List, preview: bool = False) -> Tuple[int, Tensor | None]:\n self.net.eval()\n\n # forward\n preds, _ = self.net(imgs) # (xyxy, conf, cls) [h, w]\n\n # convert pred format\n batch_size, _, height, width = imgs.shape\n targets[:, 2:] *= torch.tensor((width, height, width, height), device=self.device) # (id, cls, xyxy) [1, 1] -> [h, w]\n preds = non_max_suppression(preds, conf_thres=0.001, iou_thres=0.6, labels=[], multi_label=True) # (xyxy, conf, cls) [h, w]\n\n # const\n iou_v = torch.linspace(0.5, 0.95, 10).to(self.device) # iou vector for mAP@0.5:0.95\n n_iou = iou_v.numel()\n\n # record\n seen = 0\n\n # statistics per images\n for si, pred in enumerate(preds):\n labels = targets[targets[:, 0] == si, 1:] # (cls, xyxy) [h, w]\n\n num_l, num_p = labels.shape[0], pred.shape[0]\n correct = torch.zeros(num_p, n_iou, dtype=torch.bool, device=self.device)\n seen += 1\n\n # no pred result\n if num_p == 0:\n if num_l:\n stats.append((correct, *torch.zeros((2, 0), device=self.device), labels[:, 0]))\n continue\n\n # predictions\n pred_n = pred.clone()\n\n # evaluate\n if num_l:\n t_box = labels[:, 1:5] # (xyxy) [h, w]\n labels_n = torch.cat((labels[:, 0:1], t_box), 1) # (xyxy, cls) [h, w]\n correct = self.process_batch(pred_n, labels_n, iou_v)\n\n # update stats matrix\n stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)\n\n # preview\n if preview:\n prv = self.preview(imgs, preds)\n return seen, prv\n\n # return as expected\n return seen, None\n\n @torch.inference_mode()\n def inference(self, imgs: Tensor) -> Tensor:\n self.net.eval()\n # forward\n preds, _ = self.net(imgs)\n # convert pred format\n batch_size, _, height, width = imgs.shape\n preds = non_max_suppression(preds, conf_thres=0.001, iou_thres=0.6, multi_label=True) # [xyxy, conf, cls]\n # return as expected\n return preds\n\n def criterion(self, imgs: Tensor, targets: Tensor) -> Tuple[Tensor, List[number]]:\n \"\"\"\n criterion on detector\n \"\"\"\n\n logging.debug('criterion on yolo')\n\n # forward\n pred = self.forward(imgs) # (bs, 3, 80, 80, class + 5)\n\n # calculate loss\n targets[:, 2:] = box_convert(targets[:, 2:], 'xyxy', 'cxcywh') # (idx, cls, x1, y1, x2, y2) -> (idx, cls, cx, cy, w, h)\n loss, loss_items = self.loss(pred, targets.to(self.device))\n\n return loss, [x.item() for x in loss_items]\n\n @staticmethod\n def preview(imgs: Tensor, preds: Tensor, conf_th: float = 0.6):\n imgs_mk = []\n # preds: (xyxy, conf, cls)\n\n # mark on images\n for img, pred in zip(imgs, preds):\n pred = list(filter(lambda x: x[4] > conf_th, pred))\n logging.debug(f'detect {len(pred)} on images')\n img = (img * 255).type(torch.uint8)\n boxes = [x[:4] for x in pred]\n cls = [int(x[5].cpu().numpy()) for x in pred]\n labels = [f'{[cls]}: {x[4].cpu().numpy():.2f}' for cls, x in zip(cls, pred)]\n if len(boxes):\n img = draw_bounding_boxes(img, torch.stack(boxes, dim=0), labels=labels, width=2)\n imgs_mk.append((img / 255).float().to(imgs.device))\n\n # fill or crop to 9 images\n if len(imgs_mk) > 9:\n imgs_mk = imgs_mk[:9]\n elif len(imgs_mk) < 9:\n zeros = [torch.zeros_like(imgs_mk[0], device=imgs[0].device) for _ in range(9 - len(imgs_mk))]\n imgs_mk = imgs_mk + zeros\n\n # merge images(9, 3, h, w) to one image (3, 3h, 3w)\n imgs_mk = torch.stack(imgs_mk, dim=0)\n imgs_c = []\n for i in range(3):\n t = [imgs_mk[i * 3 + j] for j in range(3)] # [(3, h, w), (3, h, w), (3, h, w)]\n imgs_c.append(torch.cat(t, dim=2)) # (3, h, 3w)\n imgs_one = torch.cat(imgs_c, dim=1) # (3, 3h, 3w)\n\n # return as expected\n return imgs_one\n\n def param_groups(self) -> tuple[List, List, List]:\n group = [], [], []\n tmp = get_param_groups(self.net)\n for idx in range(3):\n group[idx].extend(tmp[idx])\n return group\n\n @staticmethod\n def process_batch(detections, labels, iou_v):\n \"\"\"\n Return correct predictions' matrix. Both sets of boxes are in (x1, y1, x2, y2) format.\n Arguments:\n detections (Array[N, 6]), x1, y1, x2, y2, conf, class\n labels (Array[M, 5]), class, x1, y1, x2, y2\n iou_v (Array[10]), iou thresholds\n Returns:\n correct (Array[N, 10]), for 10 IoU levels\n \"\"\"\n correct = torch.zeros(detections.shape[0], iou_v.shape[0], dtype=torch.bool, device=iou_v.device)\n iou = box_iou(labels[:, 1:], detections[:, :4])\n x = torch.where((iou >= iou_v[0]) & (labels[:, 0:1] == detections[:, 5])) # IoU above threshold and classes match\n if x[0].shape[0]:\n matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detection, iou]\n if x[0].shape[0] > 1:\n matches = matches[matches[:, 2].argsort()[::-1]]\n matches = matches[numpy.unique(matches[:, 1], return_index=True)[1]]\n # matches = matches[matches[:, 2].argsort()[::-1]]\n matches = matches[numpy.unique(matches[:, 0], return_index=True)[1]]\n matches = torch.Tensor(matches).to(iou_v.device)\n correct[matches[:, 1].long()] = matches[:, 2:3] >= iou_v\n return correct\n"
},
{
"path": "pipeline/fuse.py",
"content": "import logging\nimport sys\nfrom pathlib import Path\nfrom typing import Literal, List, Tuple, Optional\n\nimport torch\nimport torch.backends.cudnn\nfrom kornia.filters import spatial_gradient\nfrom kornia.losses import MS_SSIMLoss, ssim_loss\nfrom numpy import number\nfrom torch import Tensor\nfrom torch.nn.functional import l1_loss\n\nfrom functions.div_loss import div_loss\nfrom functions.get_param_groups import get_param_groups\nfrom module.fuse.discriminator import Discriminator\nfrom module.fuse.generator import Generator\n\n\nclass Fuse:\n r\"\"\"\n Init fuse pipeline to generate fused images from infrared and visible images.\n \"\"\"\n\n def __init__(self, config, mode: Literal['train', 'inference']):\n # attach hyper parameters\n self.config = config\n self.mode = mode # fuse computation mode: train(grad+graph), eval(graph), inference(x)\n modules = []\n\n # init device\n device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')\n logging.info(f'deploy tardal-fuse on device {str(device)}')\n self.device = device\n\n # init tardal generator\n f_dim, f_depth = config.fuse.dim, config.fuse.depth\n generator = Generator(dim=f_dim, depth=f_depth)\n modules.append(generator)\n logging.info(f'init generator with (dim: {f_dim} depth: {f_depth})')\n self.generator = generator\n\n # init tardel discriminator during train mode\n if mode == 'train':\n f_size = config.train.image_size\n dis_t = Discriminator(dim=f_dim, size=f_size)\n dis_d = Discriminator(dim=f_dim, size=f_size)\n modules += [dis_t, dis_d]\n logging.info(f'init discriminators with (dim: {f_dim} size: {f_size})')\n self.dis_t, self.dis_d = dis_t, dis_d\n\n # load pretrained parameters (optional)\n f_ckpt = config.fuse.pretrained\n if f_ckpt is not None:\n if 'http' in f_ckpt:\n ckpt_p = Path.cwd() / 'weights' / 'v1' / 'tardal.pth'\n url = f_ckpt\n logging.info(f'download pretrained parameters from {url}')\n try:\n ckpt = torch.hub.load_state_dict_from_url(url, model_dir=ckpt_p.parent, map_location='cpu')\n except Exception as err:\n logging.fatal(f'connect to {url} failed: {err}, try download pretrained weights manually')\n sys.exit(1)\n else:\n ckpt = torch.load(f_ckpt, map_location='cpu')\n self.load_ckpt(ckpt)\n\n # criterion\n if config.loss.fuse.src_fn == 'v1':\n ms_ssim_loss = MS_SSIMLoss()\n modules.append(ms_ssim_loss)\n self.ms_ssim_loss = ms_ssim_loss\n\n # move to device\n _ = [x.to(device) for x in modules]\n\n # more parameters\n # WGAN div hyper parameters\n self.wk, self.wp = 2, 6\n\n def load_ckpt(self, ckpt: dict):\n f_ckpt = ckpt if 'fuse' not in ckpt else ckpt['fuse']\n\n # check eval mode\n if self.config.inference.use_eval is None:\n if 'use_eval' in f_ckpt:\n logging.warning(f'overwriting inference.use_eval {self.config.inference.use_eval} with {f_ckpt[\"use_eval\"]}')\n self.config.inference.use_eval = f_ckpt['use_eval']\n else:\n logging.warning(f'no use_eval settings found, using default (true)')\n self.config.inference.use_eval = True\n if 'use_eval' in f_ckpt:\n f_ckpt.pop('use_eval')\n\n # load state dict\n self.generator.load_state_dict(f_ckpt)\n if self.mode == 'train' and 'disc' in ckpt:\n self.dis_t.load_state_dict(ckpt['disc']['t'])\n self.dis_d.load_state_dict(ckpt['disc']['d'])\n\n def save_ckpt(self) -> dict:\n ckpt = {'fuse': self.generator.state_dict()}\n if self.mode == 'train':\n ckpt |= {'disc': {'t': self.dis_t.state_dict(), 'd': self.dis_t.state_dict()}}\n return ckpt\n\n def forward(self, ir: Tensor, vi: Tensor) -> Tensor:\n self.generator.train()\n fus = self.generator(ir, vi)\n return fus\n\n @torch.no_grad()\n def eval(self, ir: Tensor, vi: Tensor) -> Tensor:\n self.generator.eval()\n fus = self.generator(ir, vi)\n return fus\n\n @torch.inference_mode()\n def inference(self, ir: Tensor, vi: Tensor) -> Tensor:\n if self.config.inference.use_eval:\n self.generator.eval()\n fus = self.generator(ir, vi)\n return fus\n\n def criterion_dis_t(self, ir: Tensor, vi: Tensor, mk: Tensor) -> Tensor:\n \"\"\"\n criterion on target discriminator 'ir * m <- pixel distribution -> fus * m'\n \"\"\"\n\n logging.debug('criterion on target discriminator')\n\n # switch to train mode\n self.dis_t.train()\n\n # sample real & fake\n real_s = ir * mk\n fake_s = self.eval(ir, vi) * mk\n fake_s.detach_()\n\n # judge value towards real & fake\n real_v = torch.squeeze(self.dis_t(real_s))\n fake_v = torch.squeeze(self.dis_t(fake_s))\n\n # loss calculate\n real_l, fake_l = -real_v.mean(), fake_v.mean()\n div = div_loss(self.dis_t, real_s, fake_s, self.wp)\n loss = real_l + fake_l + self.wk * div\n\n return loss\n\n def criterion_dis_d(self, ir: Tensor, vi: Tensor, mk: Tensor) -> Tensor:\n \"\"\"\n criterion on detail discriminator 'vi * m <- grad distribution -> fus * (1-m)'\n mask: optional\n \"\"\"\n\n logging.debug('criterion on detail discriminator')\n\n # switch to train mode\n self.dis_d.train()\n\n # sample real & fake\n mk = mk if self.config.loss.fuse.d_mask else 0 # use mask or not\n real_s = self.gradient(vi) * (1 - mk)\n fake_s = self.gradient(self.eval(ir, vi)) * (1 - mk)\n fake_s.detach_()\n\n # judge value towards real & fake\n real_v = torch.squeeze(self.dis_d(real_s))\n fake_v = torch.squeeze(self.dis_d(fake_s))\n\n # loss calculate\n real_l, fake_l = -real_v.mean(), fake_v.mean()\n div = div_loss(self.dis_d, real_s, fake_s, self.wp)\n loss = real_l + fake_l + self.wk * div\n\n return loss\n\n def criterion_generator(self, ir: Tensor, vi: Tensor, mk: Tensor, w1: Tensor, w2: Tensor, d_warming: bool = True):\n \"\"\"\n criterion on generator 'ir, vi <- loss -> fus'\n return: Tuple[Tensor, List[number]] (only fuse), Tuple[Tensor, Tensor, List[number]] (joint mode)\n \"\"\"\n\n logging.debug('criterion on generator')\n\n # forward (train mode for calculate loss)\n fus = self.forward(ir, vi)\n\n # calculate src and adv loss\n f_loss = self.config.loss.fuse\n src_w, adv_w = f_loss.src, f_loss.adv\n adv_w = 0 if d_warming else adv_w\n src_l = w1 * self.src_loss(fus, ir) + w2 * self.src_loss(fus, vi)\n adv_l, tar_l, det_l = self.adv_loss(fus, mk)\n loss = src_w * src_l.mean() + adv_w * adv_l.mean()\n\n # only fuse\n return loss, [src_l.mean().item(), adv_l.mean().item(), tar_l, det_l]\n\n @staticmethod\n def gradient(x: Tensor, eps: float = 1e-8) -> Tensor:\n s = spatial_gradient(x, 'sobel')\n dx, dy = s[:, :, 0, :, :], s[:, :, 1, :, :]\n u = torch.sqrt(torch.pow(dx, 2) + torch.pow(dy, 2) + eps) # sqrt backwork x range: (0, n]\n return u\n\n def src_loss(self, x: Tensor, y: Tensor) -> Tensor:\n src_fn = self.config.loss.fuse.src_fn\n match src_fn:\n case 'v0':\n \"fus <- 0.01*ssim + 0.99*l1 -> src\"\n return 0.01 * ssim_loss(x, y, window_size=11) + 0.99 * l1_loss(x, y)\n case 'v1':\n \"fus <- ms-ssim -> src\"\n return self.ms_ssim_loss(x, y)\n case _:\n assert NotImplemented, f'unsupported src function: {src_fn}'\n\n def adv_loss(self, fus: Tensor, mk: Tensor) -> Tuple[Tensor, number, number]:\n # weights\n f_loss = self.config.loss.fuse\n tar_w, det_w = f_loss.t_adv, f_loss.d_adv\n # target loss\n self.dis_t.eval()\n tar_l = -self.dis_t(fus * mk) # fus * m -> target pixel distribution (max -> -min)\n # detail loss\n self.dis_d.eval()\n mk = mk if self.config.loss.fuse.d_mask else 0 # use mask or not\n det_l = -self.dis_d(self.gradient(fus) * (1 - mk)) # grad(fus) * (1-m) -> grad distribution (max -> -min)\n return tar_w * tar_l + det_w * det_l, tar_l.mean().item(), det_l.mean().item()\n\n def param_groups(self, key: Optional[Literal['g', 'd']] = None) -> tuple[List, List, List]:\n match key:\n case 'g':\n return self.g_params()\n case 'd':\n return self.d_params()\n case _:\n g_params, d_params = self.g_params(), self.d_params()\n group = [], [], []\n for idx in range(3):\n group[idx].extend(g_params[idx])\n group[idx].extend(d_params[idx])\n return group\n\n def g_params(self) -> tuple[List, List, List]:\n return get_param_groups(self.generator)\n\n def d_params(self) -> tuple[List, List, List]:\n group = [], [], []\n for module in [self.dis_t, self.dis_d]:\n tmp = get_param_groups(module)\n for idx in range(3):\n group[idx].extend(tmp[idx])\n return group\n"
},
{
"path": "pipeline/iqa.py",
"content": "import logging\nimport socket\nimport sys\nfrom pathlib import Path\nfrom typing import Literal\n\nimport cv2\nimport torch.cuda\nfrom kornia import image_to_tensor, tensor_to_image\nfrom torch import Tensor\nfrom torchvision.models import vgg16\nfrom torchvision.transforms import Compose, Resize, Normalize\nfrom tqdm import tqdm\n\n\nclass IQA:\n r\"\"\"\n Init information measurement pipeline to generate iqa from source images.\n \"\"\"\n\n def __init__(self, url: str):\n # init device\n device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')\n logging.info(f'deploy iqa on device {str(device)}')\n self.device = device\n\n # init vgg backbone\n extractor = vgg16().features\n logging.info(f'init iqa extractor with (3 -> 1)')\n self.extractor = extractor\n\n # download pretrained parameters\n ckpt_p = Path.cwd() / 'weights' / 'v1' / 'iqa.pth'\n logging.info(f'download pretrained iqa weights from {url}')\n socket.setdefaulttimeout(5)\n try:\n logging.info(f'starting download of pretrained weights from {url}')\n ckpt = torch.hub.load_state_dict_from_url(url, model_dir=ckpt_p.parent, map_location='cpu')\n except Exception as err:\n logging.fatal(f'load {url} failed: {err}, try download pretrained weights manually')\n sys.exit(1)\n extractor.load_state_dict(ckpt)\n logging.info(f'load pretrained iqa weights from {str(ckpt_p)}')\n\n # move to device\n extractor.to(device)\n\n # more parameters\n self.transform_fn = Compose([Resize((672, 672)), Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])\n self.upsample = Resize((672, 672))\n\n @torch.inference_mode()\n def inference(self, src: str | Path, dst: str | Path):\n self.modality_inference(src, dst, 'ir')\n self.modality_inference(src, dst, 'vi')\n\n @torch.inference_mode()\n def modality_inference(self, src: str | Path, dst: str | Path, modality: Literal['ir', 'vi']):\n # create save folder\n dst = Path(dst / modality)\n dst.mkdir(parents=True, exist_ok=True)\n logging.debug(f'create save folder {str(dst)}')\n\n # forward\n self.extractor.eval()\n img_list = sorted(Path(src / modality).rglob('*.png'))\n logging.info(f'load {len(img_list)} images from {str(src)}')\n process = tqdm(img_list)\n for img_p in process:\n process.set_description(f'generate iqa for {img_p.name} to {str(dst)}')\n img = self._imread(img_p).to(self.device)\n reverse_fn = Resize(size=img.shape[-2:])\n iqa = self.extractor_inference(img.unsqueeze(0))[0]\n iqa = reverse_fn(iqa).squeeze()\n cv2.imwrite(str(dst / img_p.name), tensor_to_image(iqa) * 255)\n\n @torch.inference_mode()\n def extractor_inference(self, x: Tensor) -> Tensor:\n # information measurement\n l_ids = [3, 8, 15, 22, 29] # layers before max-pooling\n f = []\n x = x.repeat(1, 3, 1, 1) if x.size(dim=1) == 1 else x\n x = self.transform_fn(x)\n for index, layer in enumerate(self.extractor):\n x = layer(x)\n if index in l_ids:\n t = x.mean(axis=1, keepdims=True)\n f.append(self.upsample(t))\n f = torch.cat(f, dim=1).mean(axis=1, keepdims=True)\n return f\n\n @staticmethod\n def _imread(img_p: str | Path):\n img = cv2.imread(str(img_p), cv2.IMREAD_GRAYSCALE)\n img = image_to_tensor(img).float() / 255\n return img\n"
},
{
"path": "pipeline/saliency.py",
"content": "import logging\nimport socket\nimport sys\nimport warnings\nfrom pathlib import Path\n\nimport cv2\nimport torch.hub\nfrom kornia import image_to_tensor, tensor_to_image\nfrom torchvision.transforms import Resize, Compose, Normalize\nfrom tqdm import tqdm\n\nfrom module.saliency.u2net import U2NETP\n\n\nclass Saliency:\n r\"\"\"\n Init saliency detection pipeline to generate mask from infrared images.\n \"\"\"\n\n def __init__(self, url: str):\n # init device\n device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')\n logging.info(f'deploy u2net on device {str(device)}')\n self.device = device\n\n # init u2net small (u2netp)\n net = U2NETP(in_ch=1, out_ch=1)\n logging.info(f'init u2net small model with (1 -> 1)')\n self.net = net\n\n # download pretrained parameters\n ckpt_p = Path.cwd() / 'weights' / 'v1' / 'u2netp.pth'\n logging.info(f'download pretrained u2net weights from {url}')\n socket.setdefaulttimeout(5)\n try:\n logging.info(f'starting download of pretrained weights from {url}')\n ckpt = torch.hub.load_state_dict_from_url(url, model_dir=ckpt_p.parent, map_location='cpu')\n except Exception as err:\n logging.fatal(f'load {url} failed: {err}, try download pretrained weights manually')\n sys.exit(1)\n net.load_state_dict(ckpt)\n logging.info(f'load pretrained u2net weights from {str(ckpt_p)}')\n\n # move to device\n net.to(device)\n\n # more parameters\n self.transform_fn = Compose([Resize(size=(320, 320)), Normalize(mean=0.485, std=0.229)])\n\n @torch.inference_mode()\n def inference(self, src: str | Path, dst: str | Path):\n # create save folder\n dst = Path(dst)\n dst.mkdir(parents=True, exist_ok=True)\n logging.debug(f'create save folder {str(dst)}')\n\n # forward\n self.net.eval()\n warnings.filterwarnings(action='ignore', lineno=780)\n img_list = sorted(Path(src).rglob('*.png'))\n logging.info(f'load {len(img_list)} images from {str(src)}')\n process = tqdm(img_list)\n for img_p in process:\n process.set_description(f'generate mask for {img_p.name} to {str(dst)}')\n img = self._imread(img_p).to(self.device)\n reverse_fn = Resize(size=img.shape[-2:])\n img = self.transform_fn(img)\n mask = self.net(img.unsqueeze(0))[0]\n mask = (mask - mask.min()) / (mask.max() - mask.min())\n mask = reverse_fn(mask).squeeze()\n cv2.imwrite(str(dst / img_p.name), tensor_to_image(mask) * 255)\n\n @staticmethod\n def _imread(img_p: str | Path):\n img = cv2.imread(str(img_p), cv2.IMREAD_GRAYSCALE)\n img = image_to_tensor(img).float() / 255\n return img\n"
},
{
"path": "pipeline/train.py",
"content": "import logging\nfrom functools import reduce\nfrom pathlib import Path\n\nimport torch\nimport wandb\nfrom kornia.filters import SpatialGradient\nfrom kornia.losses import SSIMLoss\nfrom kornia.metrics import AverageMeter\nfrom torch import nn, Tensor\nfrom torch.optim import RMSprop\nfrom torch.utils.data import DataLoader\nfrom torchvision import transforms\nfrom tqdm import tqdm\n\nfrom functions.div_loss import div_loss\nfrom modules.discriminator import Discriminator\nfrom modules.generator import Generator\nfrom utils.environment_probe import EnvironmentProbe\nfrom utils.fusion_data import FusionData\n\n\nclass Train:\n \"\"\"\n The train process for TarDAL.\n \"\"\"\n\n def __init__(self, environment_probe: EnvironmentProbe, config: dict):\n logging.info(f'TarDAL Training | mask: {config.mask} | weight: {config.weight} | adv: {config.adv_weight}')\n self.config = config\n self.environment_probe = environment_probe\n\n # modules\n logging.info(f'generator | dim: {config.dim} | depth: {config.depth}')\n self.generator = Generator(config.dim, config.depth)\n logging.info(f'discriminator | dim: {config.dim} | size: {config.size}')\n self.dis_target = Discriminator(config.dim, (config.size, config.size))\n self.dis_detail = Discriminator(config.dim, (config.size, config.size))\n\n # WGAN adam optim\n logging.info(f'RMSprop | learning rate: {config.learning_rate}')\n self.opt_generator = RMSprop(self.generator.parameters(), lr=config.learning_rate)\n self.opt_dis_target = RMSprop(self.dis_target.parameters(), lr=config.learning_rate)\n self.opt_dis_detail = RMSprop(self.dis_detail.parameters(), lr=config.learning_rate)\n\n # move to device\n logging.info(f'module device: {environment_probe.device}')\n self.generator.to(environment_probe.device)\n self.dis_target.to(environment_probe.device)\n self.dis_detail.to(environment_probe.device)\n\n # loss\n self.l1 = nn.L1Loss(reduction='none')\n self.ssim = SSIMLoss(window_size=11, reduction='none')\n self.l1.cuda()\n self.ssim.cuda()\n\n # functions\n self.spatial = SpatialGradient('diff')\n\n # WGAN div hyper parameters\n self.wk, self.wp = 2, 6\n\n # datasets\n folder = Path(config.folder)\n resize = transforms.Resize((config.size, config.size))\n dataset = FusionData(folder, config.mask, 'train', transforms=resize)\n self.dataloader = DataLoader(dataset, config.batch_size, True, num_workers=config.num_workers, pin_memory=True)\n logging.info(f'dataset | folder: {str(folder)} | size: {len(self.dataloader) * config.batch_size}')\n\n def train_dis_target(self, ir: Tensor, vi: Tensor, mk: Tensor) -> Tensor:\n \"\"\"\n Train target discriminator for 'ir * m <- pixel -> fus * m'\n \"\"\"\n\n logging.debug('train target discriminator')\n # switch to train mode\n self.dis_target.train()\n\n # sample real & fake\n real_s = ir * mk\n self.generator.eval()\n fake_s = self.generator(ir, vi).detach() * mk\n\n # judge value towards real & fake\n real_v = torch.squeeze(self.dis_target(real_s))\n fake_v = torch.squeeze(self.dis_target(fake_s))\n\n # loss calculate\n real_l, fake_l = -real_v.mean(), fake_v.mean()\n div = div_loss(self.dis_target, real_s, fake_s, self.wp)\n loss = real_l + fake_l + self.wk * div\n\n # backward\n self.opt_dis_target.zero_grad()\n loss.backward()\n self.opt_dis_target.step()\n\n return loss.item()\n\n def train_dis_detail(self, ir: Tensor, vi: Tensor, mk: Tensor) -> Tensor:\n \"\"\"\n Train detail discriminator for 'vi * (1-m) <- Grad -> fus * (1-m)'\n \"\"\"\n\n logging.debug('train detail discriminator')\n # switch to train mode\n self.dis_detail.train()\n\n # sample real & fake\n real_s = self.gradient(vi * (1 - mk))\n self.generator.eval()\n fake_s = self.gradient(self.generator(ir, vi).detach() * (1 - mk))\n\n # judge value towards real & fake\n real_v = torch.squeeze(self.dis_detail(real_s))\n fake_v = torch.squeeze(self.dis_detail(fake_s))\n\n # loss calculate\n real_l, fake_l = -real_v.mean(), fake_v.mean()\n div = div_loss(self.dis_detail, real_s, fake_s, self.wp)\n loss = real_l + fake_l + self.wk * div\n\n # backward\n self.opt_dis_detail.zero_grad()\n loss.backward()\n self.opt_dis_detail.step()\n\n return loss.item()\n\n def gradient(self, x: Tensor, eps: float = 1e-6) -> Tensor:\n s = self.spatial(x)\n dx, dy = s[:, :, 0, :, :], s[:, :, 1, :, :]\n u = torch.sqrt(torch.pow(dx, 2) + torch.pow(dy, 2) + eps)\n return u\n\n def train_generator(self, ir: Tensor, vi: Tensor, mk: Tensor, s1: Tensor, s2: Tensor) -> dict:\n \"\"\"\n Train generator 'ir + vi -> fus'\n \"\"\"\n\n logging.debug('train generator')\n self.generator.train()\n fus = self.generator(ir, vi)\n\n # calculate loss towards criterion\n b1, b2, b3 = self.config.weight # b1 * ssim + b2 * l1 + b3 * adv\n\n l_ir = b1 * self.ssim(fus, ir) + b2 * self.l1(fus, ir)\n l_vi = b1 * self.ssim(fus, vi) + b2 * self.l1(fus, vi)\n\n w1, w2 = 0.5 + 0.5 * (s1 - s2), 0.5 + 0.5 * (s2 - s1) # data driven loss weights\n l_src = w1 * l_ir + w2 * l_vi # fus <- ssim + l1 -> (ir, vi)\n l_src = l_src.mean()\n\n self.dis_target.eval()\n l_target = -self.dis_target(fus * mk).mean() # judge target: fus * m\n self.dis_detail.eval()\n l_detail = -self.dis_detail(self.gradient(fus * (1 - mk))).mean() # judge detail: Grad(fus * (1-mk))\n\n c1, c2 = self.config.adv_weight # c1 * l_target + c2 * l_detail\n l_adv = c1 * l_target + c2 * l_detail\n\n loss = l_src + b3 * l_adv\n\n # backward\n self.opt_generator.zero_grad()\n loss.backward()\n self.opt_generator.step()\n\n # loss state\n state = {\n 'g_loss': loss.item(),\n 'g_src_ir': l_ir.mean().item(),\n 'g_src_vi': l_vi.mean().item(),\n 'g_adv_target': l_target.item(),\n 'g_adv_detail': l_detail.item(),\n }\n\n return state\n\n def run(self):\n for epoch in range(1, self.config.epochs + 1):\n process = tqdm(enumerate(self.dataloader), disable=not self.config.debug)\n meter = AverageMeter()\n for idx, sample in process:\n ir, vi, mk = sample['ir'], sample['vi'], sample['mk']\n s1, s2 = sample['vsm']['ir'], sample['vsm']['vi']\n im = torch.cat([ir, vi, mk, s1, s2], dim=1)\n im = im.to(self.environment_probe.device)\n ir, vi, mk, s1, s2 = torch.chunk(im, 5, dim=1)\n\n g_loss = self.train_generator(ir, vi, mk, s1, s2)\n d_target_loss = self.train_dis_target(ir, vi, mk)\n d_detail_loss = self.train_dis_detail(ir, vi, mk)\n\n process.set_description(f'g: {g_loss[\"g_loss\"]:03f} | d: {d_target_loss:03f}, {d_detail_loss:03f}')\n meter.update(Tensor(list(g_loss.values()) + [d_target_loss] + [d_detail_loss]))\n\n keys = ['g_loss', 'g_src_ir', 'g_src_vi', 'g_adv_t', 'g_adv_d', 'd_t', 'd_d']\n state = reduce(lambda x, y: x | y, [{k: v} for k, v in zip(keys, meter.avg)])\n print(state)\n wandb.log(state)\n if epoch % 5 == 0:\n self.save(epoch)\n\n def save(self, epoch: int):\n path = Path(self.config.cache) / self.config.id\n path.mkdir(parents=True, exist_ok=True)\n cache = path / f'{epoch:03d}.pth'\n logging.info(f'save checkpoint to {str(cache)}')\n state = {\n 'g': self.generator.state_dict(),\n 'd': {\n 't': self.dis_target.state_dict(),\n 'd': self.dis_target.state_dict(),\n },\n 'opt': {\n 'g': self.opt_generator.state_dict(),\n 't': self.opt_dis_target.state_dict(),\n 'd': self.opt_dis_detail.state_dict(),\n },\n }\n torch.save(state, cache)\n"
},
{
"path": "requirements.txt",
"content": "# TarDAL requirements\n# Usage: pip install -r requirements.txt\n\n# Base ----------------------------------------\nnumpy>=1.20\ntorch>=1.9\ntorchvision>=0.10\nkornia>=0.6.8\nopencv-python>=4.5.5.64\nPyYAML>=6.0\npandas>=1.5.1\nmatplotlib>=3.6.3\n\n# Logging -------------------------------------\nwandb>=0.12.11\ntqdm>=4.63.0\ntabulate>=0.8.9\n"
},
{
"path": "scripts/__init__.py",
"content": "from scripts.infer_f import InferF\nfrom scripts.infer_fd import InferFD\nfrom scripts.train_f import TrainF\nfrom scripts.train_fd import TrainFD\n\n__all__ = ['TrainF', 'TrainFD', 'InferF', 'InferFD']\n"
},
{
"path": "scripts/infer_f.py",
"content": "import logging\nfrom pathlib import Path\n\nimport torch\nimport yaml\nfrom kornia.color import ycbcr_to_rgb\nfrom torch.utils.data import DataLoader\nfrom tqdm import tqdm\n\nimport loader\nfrom config import ConfigDict, from_dict\nfrom pipeline.fuse import Fuse\nfrom tools.dict_to_device import dict_to_device\n\n\nclass InferF:\n def __init__(self, config: str | Path | ConfigDict, save_dir: str | Path):\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level='INFO', format=log_f)\n logging.info(f'TarDAL-v1 Inference Script')\n\n # init config\n if isinstance(config, str) or isinstance(config, Path):\n config = yaml.safe_load(Path(config).open('r'))\n config = from_dict(config) # convert dict to object\n else:\n config = config\n self.config = config\n\n # debug mode\n if config.debug.fast_run:\n logging.warning('fast run mode is on, only for debug!')\n\n # create save(output) folder\n save_dir = Path(save_dir)\n save_dir.mkdir(parents=True, exist_ok=True)\n logging.info(f'create save folder {str(save_dir)}')\n self.save_dir = save_dir\n\n # init dataset & dataloader\n data_t = getattr(loader, config.dataset.name) # dataset type\n self.data_t = data_t\n p_dataset = data_t(root=config.dataset.root, mode='pred', config=config)\n self.p_loader = DataLoader(\n p_dataset, batch_size=config.inference.batch_size, shuffle=False,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.inference.num_workers,\n )\n\n # init pipeline\n fuse = Fuse(config, mode='inference')\n self.fuse = fuse\n\n @torch.inference_mode()\n def run(self):\n p_l = tqdm(self.p_loader, total=len(self.p_loader), ncols=120)\n for sample in p_l:\n sample = dict_to_device(sample, self.fuse.device)\n # f_net forward\n fus = self.fuse.inference(ir=sample['ir'], vi=sample['vi'])\n # recolor\n if self.data_t.color and self.config.inference.grayscale is False:\n fus = torch.cat([fus, sample['cbcr']], dim=1)\n fus = ycbcr_to_rgb(fus)\n # save images\n self.data_t.pred_save(\n fus, [self.save_dir / name for name in sample['name']],\n shape=sample['shape']\n )\n"
},
{
"path": "scripts/infer_fd.py",
"content": "import logging\nfrom pathlib import Path\n\nimport torch\nimport yaml\nfrom kornia.color import ycbcr_to_rgb\nfrom torch.utils.data import DataLoader\nfrom tqdm import tqdm\n\nimport loader\nfrom config import ConfigDict, from_dict\nfrom pipeline.detect import Detect\nfrom pipeline.fuse import Fuse\nfrom tools.dict_to_device import dict_to_device\n\n\nclass InferFD:\n def __init__(self, config: str | Path | ConfigDict, save_dir: str | Path):\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level='INFO', format=log_f)\n logging.info(f'TarDAL-v1 Inference Script')\n\n # init config\n if isinstance(config, str) or isinstance(config, Path):\n config = yaml.safe_load(Path(config).open('r'))\n config = from_dict(config) # convert dict to object\n else:\n config = config\n self.config = config\n\n # debug mode\n if config.debug.fast_run:\n logging.warning('fast run mode is on, only for debug!')\n\n # save label as txt warning\n if config.inference.save_txt:\n logging.warning('labels will be saved as txt, this will slow down the inference speed!')\n\n # create save(output) folder\n save_dir = Path(save_dir)\n save_dir.mkdir(parents=True, exist_ok=True)\n (save_dir / 'images').mkdir(exist_ok=True)\n (save_dir / 'labels').mkdir(exist_ok=True)\n logging.info(f'create save folder {str(save_dir)}')\n self.save_dir = save_dir\n\n # init dataset & dataloader\n data_t = getattr(loader, config.dataset.name) # dataset type\n self.data_t = data_t\n p_dataset = data_t(root=config.dataset.root, mode='pred', config=config)\n self.p_loader = DataLoader(\n p_dataset, batch_size=config.inference.batch_size, shuffle=False,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.inference.num_workers,\n )\n\n # init pipeline\n fuse = Fuse(config, mode='inference')\n self.fuse = fuse\n detect = Detect(config, mode='inference', nc=len(p_dataset.classes), classes=p_dataset.classes, labels=p_dataset.labels)\n self.detect = detect\n\n @torch.inference_mode()\n def run(self):\n p_l = tqdm(self.p_loader, total=len(self.p_loader), ncols=80)\n for sample in p_l:\n sample = dict_to_device(sample, self.fuse.device)\n # set description\n p_l.set_description(f'infer {sample[\"name\"][0]} ({len(sample[\"name\"])} images)')\n # f_net forward\n fus = self.fuse.inference(ir=sample['ir'], vi=sample['vi'])\n # recolor\n if self.data_t.color and self.config.inference.grayscale is False:\n fus = torch.cat([fus, sample['cbcr']], dim=1)\n fus = ycbcr_to_rgb(fus)\n # d_net forward\n pred = self.detect.inference(fus)\n # save images\n self.data_t.pred_save(\n fus, [self.save_dir / name for name in sample['name']],\n shape=sample['shape'], pred=pred,\n save_txt=self.config.inference.save_txt,\n )\n"
},
{
"path": "scripts/train_f.py",
"content": "import argparse\nimport logging\nfrom functools import reduce\nfrom pathlib import Path\n\nimport torch\nimport wandb\nimport yaml\nfrom kornia.metrics import AverageMeter\nfrom torch import Tensor\nfrom torch.optim import AdamW, Adam, SGD\nfrom torch.optim.lr_scheduler import LambdaLR\nfrom torch.utils.data import DataLoader\nfrom tqdm import tqdm\n\nimport loader\nfrom config import from_dict, ConfigDict\nfrom pipeline.fuse import Fuse\nfrom tools.dict_to_device import dict_to_device\n\n\nclass TrainF:\n def __init__(self, config: str | Path | ConfigDict, wandb_key: str):\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level='INFO', format=log_f)\n logging.info(f'TarDAL-v1 Training Script')\n\n # init config\n if isinstance(config, str) or isinstance(config, Path):\n config = yaml.safe_load(Path(config).open('r'))\n config = from_dict(config) # convert dict to object\n else:\n config = config\n self.config = config\n\n # debug mode\n if config.debug.fast_run:\n logging.warning('fast run mode is on, only for debug!')\n\n # wandb run\n wandb.login(key=wandb_key) # wandb api key\n runs = wandb.init(project='TarDAL-v1', config=config, mode=config.debug.wandb_mode)\n self.runs = runs\n\n # init save folder\n save_dir = Path(self.config.save_dir) / self.runs.id\n save_dir.mkdir(parents=True, exist_ok=True)\n self.save_dir = save_dir\n logging.info(f'model weights will be saved to {str(save_dir)}')\n\n # init pipeline\n fuse = Fuse(config, mode='train')\n self.fuse = fuse\n\n # freeze & grad\n for k, v in fuse.generator.named_parameters():\n v.requires_grad = True # train all layers\n if any(x in k for x in config.train.freeze):\n logging.info(f'freezing {k}')\n v.requires_grad = False\n\n # init optimizer\n o_cfg = config.optimizer\n fuse_pg = fuse.param_groups() # [weight(with decay), weight(no decay), bias]\n groups = [\n {'params': fuse_pg[0], 'lr': o_cfg.lr_i, 'weight_decay': o_cfg.weight_decay},\n {'params': fuse_pg[1], 'lr': o_cfg.lr_i, 'weight_decay': 0},\n ]\n match o_cfg.name:\n case 'sgd':\n optimizer = SGD(fuse_pg[2], lr=o_cfg.lr_i, momentum=o_cfg.momentum, nesterov=True)\n case 'adam':\n optimizer = Adam(fuse_pg[2], lr=o_cfg.lr_i, betas=(o_cfg.momentum, 0.999))\n case 'adamw':\n optimizer = AdamW(fuse_pg[2], lr=o_cfg.lr_i, betas=(o_cfg.momentum, 0.999), weight_decay=0)\n case _:\n optimizer = None\n assert NotImplemented, f'unsupported optimizer: {o_cfg.name}'\n self.optimizer = optimizer\n self.optimizer.add_param_group(groups[0])\n self.optimizer.add_param_group(groups[1])\n\n # init scheduler\n lr_fn = lambda x: (1 - x / config.train.epochs) * (1 - o_cfg.lr_f) + o_cfg.lr_f\n self.scheduler = LambdaLR(self.optimizer, lr_lambda=lr_fn)\n\n # init dataset & dataloader\n data_t = getattr(loader, config.dataset.name) # dataset type\n t_dataset = data_t(root=config.dataset.root, mode='train', config=config)\n v_dataset = data_t(root=config.dataset.root, mode='val', config=config)\n self.t_loader = DataLoader(\n t_dataset, batch_size=config.train.batch_size, shuffle=True,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.train.num_workers,\n )\n self.v_loader = DataLoader(\n v_dataset, batch_size=config.train.batch_size,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.train.num_workers,\n )\n\n def run(self):\n # epochs & eval interval & save interval\n epochs = self.config.train.epochs\n e_interval = self.config.train.eval_interval\n s_interval = self.config.train.save_interval\n # start training process\n for epoch in range(1, epochs + 1):\n # train\n t_l = tqdm(self.t_loader, disable=False, total=len(self.t_loader) if not self.config.debug.fast_run else 3, ncols=120)\n g_history = [AverageMeter() for _ in range(5)] # tot, src, adv, tar, det\n disc_history = AverageMeter(), AverageMeter() # target, detail\n log_dict = {}\n for sample in t_l:\n sample = dict_to_device(sample, self.fuse.device)\n # train generator\n g_loss, [src_l, adv_l, tar_l, det_l] = self.fuse.criterion_generator(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n w1=sample['ir_w'], w2=sample['vi_w'],\n d_warming=epoch <= self.config.loss.fuse.d_warm,\n )\n g_history[0].update(g_loss.item())\n _ = [g_history[idx + 1].update(v) for idx, v in enumerate([src_l, adv_l, tar_l, det_l])]\n self.optim(g_loss)\n # train target discriminator\n d_t_loss = self.fuse.criterion_dis_t(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n )\n disc_history[0].update(d_t_loss.item())\n self.optim(d_t_loss)\n # train detail discriminator\n d_d_loss = self.fuse.criterion_dis_d(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n )\n disc_history[1].update(d_d_loss.item())\n self.optim(d_d_loss)\n # fast run (jump out)\n if self.config.debug.fast_run and t_l.n > 2:\n logging.info('fast mode: jump')\n break\n # train logs\n g_l, src_l, adv_l, tar_l, det_l = [g_history[i].avg for i in range(5)]\n d_t_l, d_d_l = disc_history[0].avg, disc_history[1].avg\n log_dict |= {'g/tot': g_l, 'g/src': src_l, 'g/adv': adv_l, 'g/tar': d_t_l, 'g/det': d_d_l, 'disc/tar': tar_l, 'disc/det': det_l}\n logging.info(f'Epoch {epoch}/{epochs} | Generator Loss: {g_l:.4f} | Source Loss: {src_l:.4f} | Adversarial Loss: {adv_l:.4f}')\n\n # eval (fuse: show in wandb)\n if epoch % e_interval == 0 or self.config.debug.fast_run:\n e_l = tqdm(self.v_loader, disable=True)\n for sample in e_l:\n sample = dict_to_device(sample, self.fuse.device)\n fus = self.fuse.eval(ir=sample['ir'], vi=sample['vi'])\n log_dict |= {'fuse': wandb.Image(fus), 'mask': wandb.Image(sample['mask'])}\n break\n # update scheduler and show lr\n log_dict |= reduce(lambda x, y: x | y, [{f'lr_{i}': v['lr']} for i, v in enumerate(self.optimizer.param_groups)])\n self.scheduler.step()\n\n # update wandb\n self.runs.log(log_dict)\n # save model\n if epoch % s_interval == 0 or self.config.debug.fast_run:\n ckpt = self.fuse.save_ckpt()\n torch.save(ckpt, self.save_dir / f'{str(epoch).zfill(5)}.pth')\n logging.info(f'Epoch {epoch}/{epochs} | Model Saved')\n\n def optim(self, loss: Tensor):\n self.optimizer.zero_grad()\n loss.backward()\n self.optimizer.step()\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser()\n parser.add_argument('--cfg', default='config/default.yaml', help='config file path')\n parser.add_argument('--auth', help='wandb auth api key')\n args = parser.parse_args()\n train = TrainF(args.cfg, args.auth)\n train.run()\n"
},
{
"path": "scripts/train_fd.py",
"content": "import argparse\nimport logging\nimport sys\nfrom functools import reduce\nfrom itertools import chain\nfrom pathlib import Path\n\nimport numpy\nimport torch\nimport wandb\nimport yaml\nfrom kornia.color import ycbcr_to_rgb\nfrom kornia.metrics import AverageMeter\nfrom torch.nn.utils import clip_grad_norm_\nfrom torch.optim.lr_scheduler import LambdaLR\nfrom torch.utils.data import DataLoader\nfrom tqdm import tqdm\n\nimport loader\nfrom config import from_dict, ConfigDict\nfrom module.detect.utils.metrics import ap_per_class\nfrom pipeline.detect import Detect\nfrom pipeline.fuse import Fuse\nfrom scripts.utils.smart_optimizer import smart_optimizer\nfrom tools.dict_to_device import dict_to_device\n\n\nclass TrainFD:\n def __init__(self, config: str | Path | ConfigDict, wandb_key: str):\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level='INFO', format=log_f)\n logging.info(f'TarDAL-v1 Training Script')\n\n # init config\n if isinstance(config, str) or isinstance(config, Path):\n config = yaml.safe_load(Path(config).open('r'))\n config = from_dict(config) # convert dict to object\n else:\n config = config\n self.config = config\n\n # debug mode\n if config.debug.fast_run:\n logging.warning('fast run mode is on, only for debug!')\n\n # wandb run\n wandb.login(key=wandb_key) # wandb api key\n runs = wandb.init(project='TarDAL-v1', config=config, mode=config.debug.wandb_mode)\n self.runs = runs\n\n # init save folder\n save_dir = Path(config.save_dir) / runs.id\n save_dir.mkdir(parents=True, exist_ok=True)\n self.save_dir = save_dir\n logging.info(f'model weights will be saved to {str(save_dir)}')\n\n # load dataset\n data_t = getattr(loader, config.dataset.name)\n self.data_t = data_t\n t_dataset = data_t(root=config.dataset.root, mode='train', config=config)\n v_dataset = data_t(root=config.dataset.root, mode='val', config=config)\n if 'detect' not in t_dataset.type:\n logging.fatal(f'dataset {config.dataset.name} not support detect')\n sys.exit(1)\n self.t_loader = DataLoader(\n t_dataset, batch_size=config.train.batch_size, shuffle=True,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.train.num_workers,\n )\n self.v_loader = DataLoader(\n v_dataset, batch_size=config.train.batch_size,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.train.num_workers,\n )\n\n # init pipeline\n fuse = Fuse(config, mode='train')\n self.fuse = fuse\n detect = Detect(config, mode='train', nc=len(t_dataset.classes), classes=t_dataset.classes, labels=t_dataset.labels)\n self.detect = detect\n\n # freeze & grad\n for k, v in chain(fuse.generator.named_parameters(), detect.net.named_parameters()):\n v.requires_grad = True # train all layers\n if any(x in k for x in config.train.freeze):\n logging.info(f'freezing {k}')\n v.requires_grad = False\n\n # init fuse optimizer\n o_cfg = config.optimizer\n f_p, d_p = fuse.param_groups('g'), detect.param_groups()\n self.fd_opt = smart_optimizer(o_cfg, tuple(f_p[i] + d_p[i] for i in range(3)))\n self.disc_opt = smart_optimizer(o_cfg, fuse.param_groups('d'), lr=o_cfg.lr_d)\n\n # init scheduler\n lr_fn = lambda x: (1 - x / config.train.epochs) * (1 - o_cfg.lr_f) + o_cfg.lr_f\n self.lr_fn = lr_fn\n self.scheduler = LambdaLR(self.fd_opt, lr_lambda=lr_fn)\n\n # hyperparameters check\n # bridge warm & scheduler warm phase.0\n if config.loss.bridge.warm != config.scheduler.warmup_epochs[0]:\n logging.warning(f'overwriting bridge warm {config.loss.bridge.warm} with {config.scheduler.warmup_epochs[0]}')\n config.loss.bridge.warm = config.scheduler.warmup_epochs[0]\n # discriminator warm & bridge warm\n if config.loss.fuse.d_warm >= config.loss.bridge.warm / 2:\n logging.warning(f'overwriting discriminator warm {config.loss.fuse.d_warm} with {round(config.loss.bridge.warm / 2)}')\n config.loss.fuse.d_warm = round(config.loss.bridge.warm / 2)\n\n def run(self):\n # epochs & eval interval & save interval\n epochs = self.config.train.epochs\n e_interval = self.config.train.eval_interval\n s_interval = self.config.train.save_interval\n # history switch\n best_map = -1\n\n # start training process\n l_opt_shot = -1\n n_batch_size = 64\n accumulate = max(round(n_batch_size / self.config.train.batch_size), 1)\n for epoch in range(1, epochs + 1):\n # train\n t_l = tqdm(self.t_loader, disable=False, total=len(self.t_loader) if not self.config.debug.fast_run else 3, ncols=120)\n # recorder\n g_history = AverageMeter() # generator total loss\n f_history = [AverageMeter() for _ in range(5)] # fuse loss: tot, src, adv, tar, det\n d_history = [AverageMeter() for _ in range(4)] # detect loss: tot, box, obj, cls\n disc_history = AverageMeter(), AverageMeter() # discriminator loss: target, detail\n log_dict = {}\n # warm up shots, max(warmup_epochs, 100 shots)\n w_config = self.config.scheduler\n w_shots_0 = max(round(w_config.warmup_epochs[0] * len(self.t_loader)), 100) # bridge warm\n w_shots_1 = max(round(w_config.warmup_epochs[1] * len(self.t_loader)), 100) # normal warm\n w_shots = (w_shots_0, w_shots_1)\n # process\n self.fd_opt.zero_grad()\n for idx, sample in enumerate(t_l):\n # warm up\n c_shots = idx + len(self.t_loader) * (epoch - 1)\n if c_shots < w_shots[0]:\n for jdx, x in enumerate(self.fd_opt.param_groups):\n x['lr'] = w_config.warmup_bias_lr if jdx == 0 else 0\n if 'momentum' in x:\n x['momentum'] = w_config.warmup_momentum\n if w_shots[0] <= c_shots < w_shots[1]:\n x_shot = [c_shots, w_shots[1] + c_shots]\n # accumulate = max(1, numpy.interp(c_shots, x_shot, [1, n_batch_size / self.config.train.batch_size]).round())\n for jdx, x in enumerate(self.fd_opt.param_groups):\n o_config = self.config.optimizer\n # bias lr falls from 0.1 to lr_i, all other lrs rise from 0.0 to lr_i\n w_range = [w_config.warmup_bias_lr if jdx == 0 else 0, x['initial_lr'] * self.lr_fn(epoch - 1)]\n x['lr'] = numpy.interp(c_shots, x_shot, w_range)\n if 'momentum' in x:\n x['momentum'] = numpy.interp(c_shots, x_shot, [w_config.warmup_momentum, o_config.momentum])\n lr_s = [x['lr'] for x in self.fd_opt.param_groups]\n logging.debug(f'adjust lr {lr_s[0]:.6f} {lr_s[1]:.6f} {lr_s[2]:.6f}')\n\n # forward\n sample = dict_to_device(sample, self.fuse.device)\n\n # train generator\n # ir & vi -> f_net -> fus -> d_net -> obj\n # loss: fus -> src + adv, obj -> ground truth\n # f_net forward and cal loss\n f_loss, [src_l, adv_l, tar_l, det_l] = self.fuse.criterion_generator(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n w1=sample['ir_w'], w2=sample['vi_w'],\n d_warming=epoch <= self.config.loss.fuse.d_warm,\n )\n fus = self.fuse.eval(ir=sample['ir'], vi=sample['vi'])\n if epoch <= self.config.loss.bridge.warm:\n fus.detach_() # (det -> det, fuse -> fuse, det no-> fuse)\n # recolor\n if self.data_t.color:\n fus = torch.cat([fus, sample['cbcr']], dim=1)\n fus = ycbcr_to_rgb(fus)\n # d_net forward and cal loss\n d_loss, [box_l, obj_l, cls_l] = self.detect.criterion(\n imgs=fus,\n targets=sample['labels'],\n )\n # merge loss\n b_c = self.config.loss.bridge\n g_loss = b_c['fuse'] * f_loss + b_c['detect'] * d_loss # generator total loss\n g_history.update(g_loss.item())\n _ = [f_history[idx].update(v) for idx, v in enumerate([f_loss.item(), src_l, adv_l, tar_l, det_l])]\n _ = [d_history[idx].update(v) for idx, v in enumerate([d_loss.item(), box_l, obj_l, cls_l])]\n # optimize\n g_loss.backward()\n if c_shots - l_opt_shot >= accumulate:\n clip_grad_norm_(chain(self.fuse.generator.parameters(), self.detect.net.parameters()), max_norm=10.0)\n self.fd_opt.step()\n self.fd_opt.zero_grad()\n l_opt_shot = c_shots\n logging.debug(f'optimize f+d | shots: {c_shots} | accumulate: {accumulate} | last: {l_opt_shot}')\n\n # train target discriminator\n d_t_loss = self.fuse.criterion_dis_t(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n )\n disc_history[0].update(d_t_loss.item())\n self.disc_opt.zero_grad()\n d_t_loss.backward()\n self.disc_opt.step()\n\n # train detail discriminator\n d_d_loss = self.fuse.criterion_dis_d(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n )\n disc_history[1].update(d_d_loss.item())\n self.disc_opt.zero_grad()\n d_d_loss.backward()\n self.disc_opt.step()\n\n # update description\n t_l.set_description(f'{epoch}/{epochs} | g: {g_history.avg:.4f} | f: {f_history[0].avg:.4f} | d: {d_history[0].avg:.4f}')\n\n # fast run (jump out)\n if self.config.debug.fast_run and t_l.n > 2:\n logging.info('fast mode: jump')\n break\n\n # train logs\n # fuse loss\n f_l, src_l, adv_l, tar_l, det_l = [f_history[idx].avg for idx in range(5)]\n log_dict |= {'fus/tot': f_l, 'fus/src': src_l, 'fus/adv': adv_l, 'fus/tar': tar_l, 'fus/det': det_l}\n # detect loss\n d_l, box_l, obj_l, cls_l = [d_history[idx].avg for idx in range(4)]\n log_dict |= {'det/tot': d_l, 'det/box': box_l, 'det/obj': obj_l, 'det/cls': cls_l}\n # generator loss\n g_l = g_history.avg\n log_dict |= {'gen/tot': g_l, 'gen/fus': f_l, 'gen/det': d_l}\n # discriminator loss\n d_t_l, d_d_l = [disc_history[idx].avg for idx in range(2)]\n log_dict |= {'disc/tar': d_t_l, 'disc/det': d_d_l}\n # learning rate\n lrs = [x['lr'] for x in self.fd_opt.param_groups]\n log_dict |= {'lr/0': lrs[0], 'lr/1': lrs[1], 'lr/2': lrs[2]}\n # log to console\n logging.info(f'Epoch {epoch}/{epochs} | Generator Loss: {g_l:.4f} | Fuse loss: {f_l:.4f} | Detect loss: {d_l:.4f}')\n\n # update scheduler\n self.scheduler.step()\n\n # eval (fuse & detect: print result in wandb)\n if epoch % e_interval == 0 or self.config.debug.fast_run:\n e_l = tqdm(self.v_loader, disable=False, total=len(self.v_loader) if not self.config.debug.fast_run else 3, ncols=120)\n\n # matrix\n seen = 0\n dt, p, r, f1, mp, mr, map50, map_all = [0.0, 0.0, 0.0], 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0\n j_dict, stats, ap50, ap, ap_class = [], [], [], [], []\n\n # process\n for sample in e_l:\n sample = dict_to_device(sample, self.fuse.device)\n # f_net\n fus = self.fuse.eval(ir=sample['ir'], vi=sample['vi'])\n # recolor\n if self.data_t.color:\n fus = torch.cat([fus, sample['cbcr']], dim=1)\n fus = ycbcr_to_rgb(fus)\n # d_net\n seen_x, preview = self.detect.eval(imgs=fus, targets=sample['labels'], stats=stats, preview='detect' not in log_dict)\n seen += seen_x\n if preview is not None and 'detect' not in log_dict:\n log_dict |= {'detect': wandb.Image(preview)}\n # fast run (jump out)\n if self.config.debug.fast_run and t_l.n > 2:\n logging.info('fast mode: jump')\n break\n\n # compute statistics\n stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)]\n names = reduce(lambda x, y: x | y, [{idx: name} for idx, name in enumerate(self.data_t.classes)])\n if len(stats) and stats[0].any():\n tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, names=names)\n ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95\n mp, mr, map50, map_all = p.mean(), r.mean(), ap50.mean(), ap.mean()\n num_t = numpy.bincount(stats[3].astype(int), minlength=len(self.data_t.classes)) # number of targets per class\n if num_t.sum() == 0:\n logging.warning(f'no labels found, can not compute metrics without labels.')\n\n # eval logs\n log_dict |= {'eval/precision': mp, 'eval/recall': mr, 'eval/map50': map50, 'eval/map': map_all}\n # log to console (per class)\n logging.info(f'Epoch {epoch}/{epochs} | Precision: {mp:.4f} | Recall: {mr:.4f} | mAP50: {map50:.4f} | mAP: {map_all:.4f}')\n if len(stats) and len(self.data_t.classes) > 1:\n for i, c in enumerate(ap_class):\n logging.info(\n f'{names[c]} | tot: {num_t[c]} | p: {p[i]:.4f} | r: {r[i]:.4f} | ap50: {ap50[i]:.4f} | ap: {ap[i]:.4f}'\n )\n\n # mark best\n if map_all > best_map:\n best_map = map_all\n Path(self.save_dir / 'meta.txt').write_text(f'best_map: {best_map:.4f} | epoch: {epoch}')\n ckpt = self.fuse.save_ckpt() | self.detect.save_ckpt()\n torch.save(ckpt, self.save_dir / f'{str(epoch).zfill(5)}-{best_map:.4f}.pth')\n\n # update wandb\n self.runs.log(log_dict)\n # save model\n if epoch % s_interval == 0 or self.config.debug.fast_run:\n ckpt = self.fuse.save_ckpt() | self.detect.save_ckpt()\n torch.save(ckpt, self.save_dir / f'{str(epoch).zfill(5)}.pth')\n logging.info(f'Epoch {epoch}/{epochs} | Model Saved')\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser()\n parser.add_argument('--cfg', default='config/default.yaml', help='config file path')\n parser.add_argument('--auth', help='wandb auth api key')\n args = parser.parse_args()\n train = TrainFD(args.cfg, args.auth)\n train.run()\n"
},
{
"path": "scripts/utils/smart_optimizer.py",
"content": "from typing import Tuple, List, Optional\n\nfrom torch.optim import Optimizer, AdamW, Adam, SGD\n\nfrom config import ConfigDict\n\n\ndef smart_optimizer(config: ConfigDict, param_group: Tuple[List, List, List], lr: Optional[float] = None) -> Optimizer:\n if lr is not None:\n config.lr_i = lr\n groups = [\n {'params': param_group[0], 'lr': config.lr_i, 'weight_decay': config.weight_decay},\n {'params': param_group[1], 'lr': config.lr_i, 'weight_decay': 0},\n ]\n match config.name:\n case 'sgd':\n opt = SGD(param_group[2], lr=config.lr_i, momentum=config.momentum, nesterov=True)\n case 'adam':\n opt = Adam(param_group[2], lr=config.lr_i, betas=(config.momentum, 0.999))\n case 'adamw':\n opt = AdamW(param_group[2], lr=config.lr_i, betas=(config.momentum, 0.999), weight_decay=0)\n case _:\n opt = None\n assert NotImplemented, f'unsupported optimizer: {config.name}'\n opt.add_param_group(groups[0])\n opt.add_param_group(groups[1])\n return opt\n"
},
{
"path": "tools/choose_images.py",
"content": "from functools import reduce\nfrom pathlib import Path\nfrom typing import Literal\n\nimport cv2\nimport numpy\n\n\ndef choose_images(root: str | Path, mode: str = Literal['train', 'val', 'pred']):\n root = Path(root)\n names = [x.name for x in sorted(root.glob('ir/*')) if x.suffix in ['.png', '.jpg', '.bmp']]\n save = []\n for name in names:\n x = cv2.imread(str(root / 'ir' / name), cv2.IMREAD_GRAYSCALE)\n y = cv2.imread(str(root / 'vi' / name), cv2.IMREAD_GRAYSCALE)\n t = numpy.hstack([x, y])\n cv2.imshow(name, t)\n if cv2.waitKey() == ord('s'):\n save.append(name)\n cv2.destroyWindow(name)\n meta = root / 'meta'\n meta.mkdir(parents=True, exist_ok=True)\n meta_f = meta / f'{mode}.txt'\n meta_f.write_text(reduce(lambda i, j: i + j, [t + '\\n' for t in save]))\n\n\nif __name__ == '__main__':\n choose_images('data/tno', mode='train')\n"
},
{
"path": "tools/convert_to_png.py",
"content": "import argparse\nimport logging\nfrom pathlib import Path\n\nimport cv2\nfrom tqdm import tqdm\n\n\ndef convert_to_png(src: str | Path, color: bool):\n img_list = [x for x in Path(src).rglob('*') if x.suffix in ['.bmp', '.jpg', '.tiff']]\n process = tqdm(sorted(img_list))\n for o_path in process:\n n_path = o_path.with_suffix('.png')\n process.set_description(f'convert {o_path.name} to {n_path.name}')\n img = cv2.imread(str(o_path), cv2.IMREAD_COLOR if color else cv2.IMREAD_GRAYSCALE)\n cv2.imwrite(str(n_path), img)\n o_path.unlink()\n\n\nif __name__ == '__main__':\n logging.basicConfig(level='DEBUG')\n parser = argparse.ArgumentParser('convert to png')\n parser.add_argument('--src', help='folder need to be converted')\n parser.add_argument('--color', action='store_true', help='use color mode (recommend on for vis, off for ir)')\n config = parser.parse_args()\n convert_to_png(**vars(config))\n"
},
{
"path": "tools/data_preview.py",
"content": "import argparse\nfrom pathlib import Path\nfrom typing import Optional\n\nimport cv2\nimport torch\nfrom kornia import image_to_tensor, tensor_to_image\nfrom torch import Tensor\nfrom torchvision.utils import draw_bounding_boxes\nfrom tqdm import tqdm\n\nimport loader\nfrom loader.utils.reader import label_read\n\n\ndef data_preview(img_f: str | Path, lbl_f: str | Path, dst_f: str | Path, dataset: Optional[str] = None):\n # create dst\n dst_f = Path(dst_f)\n dst_f.mkdir(parents=True, exist_ok=True)\n # images list\n img_f, lbl_f = Path(img_f), Path(lbl_f)\n img_l = sorted([x.stem for x in img_f.glob('*.png')])\n # dataset settings\n classes, palette = [], []\n if dataset is not None:\n dataset = getattr(loader, dataset)\n classes = dataset.classes\n palette = dataset.palette\n t_l = tqdm(img_l)\n for stem in t_l:\n t_l.set_description(f'draw on {stem}')\n lbl = label_read(lbl_f / f'{stem}.txt')\n img = image_to_tensor(cv2.imread(str(img_f / f'{stem}.png')))\n lbl[:, 1:] *= Tensor([img.shape[-1], img.shape[-2], img.shape[-1], img.shape[-2]])\n boxes = [x[1:] for x in lbl]\n if dataset is not None:\n cls = [classes[int(x[0])] for x in lbl]\n colors = [palette[int(x[0])] for x in lbl]\n img = draw_bounding_boxes(img, torch.stack(boxes, dim=0), cls, colors, width=3)\n else:\n img = draw_bounding_boxes(img, torch.stack(boxes, dim=0), width=3)\n cv2.imwrite(str(dst_f / f'{stem}.png'), tensor_to_image(img))\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser('data preview')\n parser.add_argument('--img', help='image folder')\n parser.add_argument('--lbl', help='label folder')\n parser.add_argument('--dst', help='mask output folder (we will create it if not exists)')\n parser.add_argument('--cls', required=False, help='dataset type (random if not specified)')\n config = parser.parse_args()\n data_preview(img_f=config.img, lbl_f=config.lbl, dst_f=config.dst, dataset=config.cls)\n"
},
{
"path": "tools/dict_to_device.py",
"content": "from typing import Dict\n\nfrom torch import Tensor\nfrom torch.types import Device\n\n\ndef dict_to_device(d: Dict, device: Device) -> Dict | None:\n if d is None:\n return None\n for k, v in d.items():\n if isinstance(v, Tensor):\n d[k] = d[k].to(device)\n return d\n"
},
{
"path": "tools/environment_probe.py",
"content": "import logging\nimport sys\n\nimport torch\n\n\nclass EnvironmentProbe:\n \"\"\"\n Detects the configuration of the environment and returns devices status.\n \"\"\"\n\n def __init__(self):\n python_v = sys.version.split()[0]\n pytorch_v = torch.__version__\n cuda_s = torch.cuda.is_available()\n device = torch.cuda.current_device() if cuda_s else 'cpu'\n device_n = torch.cuda.get_device_name(device)\n logging.info(f'python: {python_v} | pytorch: {pytorch_v} | gpu: {device_n if cuda_s else False}')\n self.device = device\n\n def memory_status(self):\n if not torch.cuda.is_available():\n return {'current': 'unavailable', 'max': 'unavailable'}\n memory_a = torch.cuda.memory_allocated(self.device) / 1024 ** 3\n memory_ma = torch.cuda.max_memory_allocated(self.device) / 1024 ** 3\n logging.debug(f'memory: {memory_a:.2f}GB (history max: {memory_ma:.2f}GB)')\n return {'current': memory_a, 'max': memory_ma}\n\n\nif __name__ == '__main__':\n logging.basicConfig(level=logging.DEBUG)\n probe = EnvironmentProbe()\n probe.memory_status()\n"
},
{
"path": "tools/generate_mask.py",
"content": "import argparse\nimport logging\n\nfrom pipeline.saliency import Saliency\n\n\ndef generate_mask(url: str, src: str, dst: str):\n saliency = Saliency(url=url)\n saliency.inference(src=src, dst=dst)\n\n\nif __name__ == '__main__':\n logging.basicConfig(level='INFO')\n default_url = 'https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/u2netp.pth'\n parser = argparse.ArgumentParser('mask generator')\n parser.add_argument('--url', default=default_url, help='checkpoint url')\n parser.add_argument('--src', help='folder need to be detected')\n parser.add_argument('--dst', help='mask output folder (we will create it if not exists)')\n config = parser.parse_args()\n generate_mask(**vars(config))\n"
},
{
"path": "tools/scenario_reader.py",
"content": "import json\nimport logging\nfrom functools import reduce\nfrom pathlib import Path\n\n\ndef scenario_counter(src: str | Path):\n # read scenario from json file\n src = Path(src)\n scenarios = json.load(open(src, 'r'))\n # output as tree format\n logging.debug(f'total scenarios: {len(scenarios)}')\n tot_t_frame, tot_v_frame = 0, 0\n for scenario in scenarios:\n t_frame, v_frame = 0, 0\n frame_buf = []\n # count frame\n for scene in scenario['scene']:\n frame = 0\n for fr in scene['range']:\n frame += fr['max'] - fr['min'] + 1\n frame_buf.append(f' | -- {scene[\"name\"]} (frame: {frame}, mode: {scene[\"mode\"]})')\n if scene['mode'] == 'train':\n t_frame += frame\n else:\n v_frame += frame\n # output\n logging.debug(f'-- {scenario[\"name\"]} (scenes: {len(scenario[\"scene\"])}, train: {t_frame}, val: {v_frame})')\n _ = [logging.debug(x) for x in frame_buf]\n tot_t_frame += t_frame\n tot_v_frame += v_frame\n logging.debug(f'total train frame: {tot_t_frame}, total val frame: {tot_v_frame}')\n\n\ndef generate_meta(root: str | Path):\n root = Path(root)\n # read scenario from json file\n t_frame, v_frame = [], []\n scenarios = json.load((root / 'meta' / 'scenario.json').open('r'))\n # count frame\n for scenario in scenarios:\n for scene in scenario['scene']:\n for fr in scene['range']:\n frame = list(range(fr['min'], fr['max'] + 1))\n if scene['mode'] == 'train':\n t_frame += frame\n else:\n v_frame += frame\n # sort by index\n t_frame.sort()\n v_frame.sort()\n # write to file\n (root / 'meta' / 'train.txt').write_text(reduce(lambda i, j: i + j, [f'{str(x).zfill(5)}.png\\n' for x in t_frame]))\n (root / 'meta' / 'val.txt').write_text(reduce(lambda i, j: i + j, [f'{str(x).zfill(5)}.png\\n' for x in v_frame]))\n # total frame\n logging.info(f'total train frame: {len(t_frame)}, total val frame: {len(v_frame)}')\n\n\nif __name__ == '__main__':\n scenario_counter('data/m3fd/meta/scenario.json')\n generate_meta('data/m3fd')\n"
},
{
"path": "train.py",
"content": "import argparse\nimport logging\nfrom pathlib import Path\n\nimport torch.backends.cudnn\nimport yaml\n\nimport scripts\nfrom config import from_dict\n\nif __name__ == '__main__':\n # args parser\n parser = argparse.ArgumentParser()\n parser.add_argument('--cfg', default='config/default.yaml', help='config file path')\n parser.add_argument('--auth', help='wandb auth api key')\n args = parser.parse_args()\n\n # init config\n config = yaml.safe_load(Path(args.cfg).open('r'))\n config = from_dict(config) # convert dict to object\n config = config\n\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level=config.debug.log, format=log_f)\n\n # init device & anomaly detector\n torch.backends.cudnn.benchmark = True\n torch.autograd.set_detect_anomaly(True)\n\n # choose train script\n logging.info(f'enter {config.strategy} train mode')\n match config.strategy:\n case 'fuse':\n train_p = getattr(scripts, 'TrainF')\n case 'detect':\n if config.loss.bridge.fuse != 0:\n logging.warning('overwrite fuse loss weight to 0')\n config.loss.bridge.fuse = 0\n train_p = getattr(scripts, 'TrainFD')\n case 'fuse & detect':\n train_p = getattr(scripts, 'TrainFD')\n case _:\n raise ValueError(f'unknown strategy: {config.strategy}')\n\n # create script instance\n train = train_p(config, wandb_key=args.auth)\n train.run()\n"
},
{
"path": "tutorial.ipynb",
"content": "{\n \"cells\": [\n {\n \"cell_type\": \"markdown\",\n \"source\": [\n \"# TarDAL online tutorial | CVPR 2022\\n\",\n \"\\n\",\n \"This is the **official** TarDAL notebook, and is freely available for everyone.\\n\",\n \"For more information please visit [GitHub Repository](https://github.com/JinyuanLiu-CV/TarDAL).\\n\",\n \"Thank you!\"\n ],\n \"metadata\": {\n \"collapsed\": false,\n \"pycharm\": {\n \"name\": \"#%% md\\n\"\n }\n }\n },\n {\n \"cell_type\": \"markdown\",\n \"source\": [\n \"## Setup Environment\\n\",\n \"\\n\",\n \"Install requirements for TarDAL.\"\n ],\n \"metadata\": {\n \"collapsed\": false,\n \"pycharm\": {\n \"name\": \"#%% md\\n\"\n }\n }\n },\n {\n \"cell_type\": \"code\",\n \"execution_count\": null,\n \"metadata\": {\n \"collapsed\": true\n },\n \"outputs\": [],\n \"source\": [\n \"!nvidia-smi # check GPU environment\\n\",\n \"!git clone https://github.com/JinyuanLiu-CV/TarDAL.git # clone repository from GitHub\\n\",\n \"\\n\",\n \"# use python 3.10\\n\",\n \"!wget https://github.com/korakot/kora/releases/download/v0.10/py310.sh\\n\",\n \"!bash ./py310.sh -b -f -p /usr/local\\n\",\n \"!python -m ipykernel install --name \\\"py310\\\" --user\\n\",\n \"\\n\",\n \"%cd TarDAL\\n\",\n \"%pip install -r requirements.txt # install tardal requirements\\n\",\n \"%pip install -r module/detect/requirements.txt # install yolov5 requirements\"\n ]\n },\n {\n \"cell_type\": \"markdown\",\n \"source\": [\n \"## Fuse or Eval\\n\",\n \"\\n\",\n \"### Load Image (List)\\n\",\n \"\\n\",\n \"infrared image(s):\\n\",\n \"\\n\",\n \"\\n\",\n \"visible image(s):\\n\",\n \"\\n\",\n \"\\n\",\n \"### Init TarDAL Pipeline\"\n ],\n \"metadata\": {\n \"collapsed\": false\n }\n },\n {\n \"cell_type\": \"code\",\n \"execution_count\": null,\n \"outputs\": [],\n \"source\": [\n \"from scripts import InferF\\n\",\n \"from config import from_dict\\n\",\n \"import yaml\\n\",\n \"from pathlib import Path\\n\",\n \"from IPython import display\\n\",\n \"\\n\",\n \"# init config\\n\",\n \"config = yaml.safe_load(Path('config/official/colab.yaml').open('r'))\\n\",\n \"config = from_dict(config) # convert dict to object\\n\",\n \"\\n\",\n \"# init infer pipeline\\n\",\n \"infer_p = InferF(config, save_dir='runs/sample/s1')\\n\",\n \"\\n\",\n \"# generate fusion sample\\n\",\n \"infer_p.run()\\n\",\n \"\\n\",\n \"# display sample\\n\",\n \"display.Image('runs/sample/s1/M3FD_00471.png')\"\n ],\n \"metadata\": {\n \"collapsed\": false,\n \"pycharm\": {\n \"is_executing\": true\n }\n }\n },\n {\n \"cell_type\": \"markdown\",\n \"source\": [],\n \"metadata\": {\n \"collapsed\": false\n }\n }\n ],\n \"metadata\": {\n \"kernelspec\": {\n \"display_name\": \"Python 3\",\n \"language\": \"python\",\n \"name\": \"python3\"\n },\n \"language_info\": {\n \"codemirror_mode\": {\n \"name\": \"ipython\",\n \"version\": 2\n },\n \"file_extension\": \".py\",\n \"mimetype\": \"text/x-python\",\n \"name\": \"python\",\n \"nbconvert_exporter\": \"python\",\n \"pygments_lexer\": \"ipython2\",\n \"version\": \"2.7.6\"\n }\n },\n \"nbformat\": 4,\n \"nbformat_minor\": 0\n}\n"
}
]
\n\n## Status\n\n\n\nIf this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous\nIntegration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5\ntraining ([trainfd.py](https://github.com/ultralytics/yolov5/blob/master/train.py)),\nvalidation ([eval.py](https://github.com/ultralytics/yolov5/blob/master/val.py)),\ninference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and\nexport ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24\nhours and on every commit.\n"
},
{
"path": "module/detect/utils/loggers/wandb/__init__.py",
"content": ""
},
{
"path": "module/detect/utils/loggers/wandb/log_dataset.py",
"content": "import argparse\n\nfrom wandb_utils import WandbLogger\n\nfrom utils.general import LOGGER\n\nWANDB_ARTIFACT_PREFIX = 'wandb-artifact://'\n\n\ndef create_dataset_artifact(opt):\n logger = WandbLogger(opt, None, job_type='Dataset Creation') # TODO: return value unused\n if not logger.wandb:\n LOGGER.info(\"install wandb using `pip install wandb` to log the dataset\")\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser()\n parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')\n parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')\n parser.add_argument('--project', type=str, default='YOLOv5', help='name of W&B Project')\n parser.add_argument('--entity', default=None, help='W&B entity')\n parser.add_argument('--name', type=str, default='log dataset', help='name of W&B run')\n\n opt = parser.parse_args()\n opt.resume = False # Explicitly disallow resume check for dataset upload job\n\n create_dataset_artifact(opt)\n"
},
{
"path": "module/detect/utils/loggers/wandb/sweep.py",
"content": "import sys\nfrom pathlib import Path\n\nimport wandb\n\nFILE = Path(__file__).resolve()\nROOT = FILE.parents[3] # YOLOv5 root directory\nif str(ROOT) not in sys.path:\n sys.path.append(str(ROOT)) # add ROOT to PATH\n\nfrom train import parse_opt, train\nfrom utils.callbacks import Callbacks\nfrom utils.general import increment_path\nfrom utils.torch_utils import select_device\n\n\ndef sweep():\n wandb.init()\n # Get hyp dict from sweep agent. Copy because train() modifies parameters which confused wandb.\n hyp_dict = vars(wandb.config).get(\"_items\").copy()\n\n # Workaround: get necessary opt args\n opt = parse_opt(known=True)\n opt.batch_size = hyp_dict.get(\"batch_size\")\n opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))\n opt.epochs = hyp_dict.get(\"epochs\")\n opt.nosave = True\n opt.data = hyp_dict.get(\"data\")\n opt.weights = str(opt.weights)\n opt.cfg = str(opt.cfg)\n opt.data = str(opt.data)\n opt.hyp = str(opt.hyp)\n opt.project = str(opt.project)\n device = select_device(opt.device, batch_size=opt.batch_size)\n\n # train\n train(hyp_dict, opt, device, callbacks=Callbacks())\n\n\nif __name__ == \"__main__\":\n sweep()\n"
},
{
"path": "module/detect/utils/loggers/wandb/sweep.yaml",
"content": "# Hyperparameters for training\n# To set range-\n# Provide min and max values as:\n# parameter:\n#\n# min: scalar\n# max: scalar\n# OR\n#\n# Set a specific list of search space-\n# parameter:\n# values: [scalar1, scalar2, scalar3...]\n#\n# You can use grid, bayesian and hyperopt search strategy\n# For more info on configuring sweeps visit - https://docs.wandb.ai/guides/sweeps/configuration\n\nprogram: utils/loggers/wandb/sweep.py\nmethod: random\nmetric:\n name: metrics/mAP_0.5\n goal: maximize\n\nparameters:\n # hyperparameters: set either min, max range or values list\n data:\n value: \"data/coco128.yaml\"\n batch_size:\n values: [64]\n epochs:\n values: [10]\n\n lr0:\n distribution: uniform\n min: 1e-5\n max: 1e-1\n lrf:\n distribution: uniform\n min: 0.01\n max: 1.0\n momentum:\n distribution: uniform\n min: 0.6\n max: 0.98\n weight_decay:\n distribution: uniform\n min: 0.0\n max: 0.001\n warmup_epochs:\n distribution: uniform\n min: 0.0\n max: 5.0\n warmup_momentum:\n distribution: uniform\n min: 0.0\n max: 0.95\n warmup_bias_lr:\n distribution: uniform\n min: 0.0\n max: 0.2\n box:\n distribution: uniform\n min: 0.02\n max: 0.2\n cls:\n distribution: uniform\n min: 0.2\n max: 4.0\n cls_pw:\n distribution: uniform\n min: 0.5\n max: 2.0\n obj:\n distribution: uniform\n min: 0.2\n max: 4.0\n obj_pw:\n distribution: uniform\n min: 0.5\n max: 2.0\n iou_t:\n distribution: uniform\n min: 0.1\n max: 0.7\n anchor_t:\n distribution: uniform\n min: 2.0\n max: 8.0\n fl_gamma:\n distribution: uniform\n min: 0.0\n max: 4.0\n hsv_h:\n distribution: uniform\n min: 0.0\n max: 0.1\n hsv_s:\n distribution: uniform\n min: 0.0\n max: 0.9\n hsv_v:\n distribution: uniform\n min: 0.0\n max: 0.9\n degrees:\n distribution: uniform\n min: 0.0\n max: 45.0\n translate:\n distribution: uniform\n min: 0.0\n max: 0.9\n scale:\n distribution: uniform\n min: 0.0\n max: 0.9\n shear:\n distribution: uniform\n min: 0.0\n max: 10.0\n perspective:\n distribution: uniform\n min: 0.0\n max: 0.001\n flipud:\n distribution: uniform\n min: 0.0\n max: 1.0\n fliplr:\n distribution: uniform\n min: 0.0\n max: 1.0\n mosaic:\n distribution: uniform\n min: 0.0\n max: 1.0\n mixup:\n distribution: uniform\n min: 0.0\n max: 1.0\n copy_paste:\n distribution: uniform\n min: 0.0\n max: 1.0\n"
},
{
"path": "module/detect/utils/loggers/wandb/wandb_utils.py",
"content": "\"\"\"Utilities and tools for tracking runs with Weights & Biases.\"\"\"\n\nimport logging\nimport os\nimport sys\nfrom contextlib import contextmanager\nfrom pathlib import Path\nfrom typing import Dict\n\nimport yaml\nfrom tqdm import tqdm\n\nFILE = Path(__file__).resolve()\nROOT = FILE.parents[3] # YOLOv5 root directory\nif str(ROOT) not in sys.path:\n sys.path.append(str(ROOT)) # add ROOT to PATH\n\nfrom utils.dataloaders import LoadImagesAndLabels, img2label_paths\nfrom utils.general import LOGGER, check_dataset, check_file\n\ntry:\n import wandb\n\n assert hasattr(wandb, '__version__') # verify package import not local dir\nexcept (ImportError, AssertionError):\n wandb = None\n\nRANK = int(os.getenv('RANK', -1))\nWANDB_ARTIFACT_PREFIX = 'wandb-artifact://'\n\n\ndef remove_prefix(from_string, prefix=WANDB_ARTIFACT_PREFIX):\n return from_string[len(prefix):]\n\n\ndef check_wandb_config_file(data_config_file):\n wandb_config = '_wandb.'.join(data_config_file.rsplit('.', 1)) # updated data.yaml path\n if Path(wandb_config).is_file():\n return wandb_config\n return data_config_file\n\n\ndef check_wandb_dataset(data_file):\n is_trainset_wandb_artifact = False\n is_valset_wandb_artifact = False\n if check_file(data_file) and data_file.endswith('.yaml'):\n with open(data_file, errors='ignore') as f:\n data_dict = yaml.safe_load(f)\n is_trainset_wandb_artifact = isinstance(\n data_dict['train'],\n str\n ) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX)\n is_valset_wandb_artifact = isinstance(\n data_dict['eval'],\n str\n ) and data_dict['eval'].startswith(WANDB_ARTIFACT_PREFIX)\n if is_trainset_wandb_artifact or is_valset_wandb_artifact:\n return data_dict\n else:\n return check_dataset(data_file)\n\n\ndef get_run_info(run_path):\n run_path = Path(remove_prefix(run_path, WANDB_ARTIFACT_PREFIX))\n run_id = run_path.stem\n project = run_path.parent.stem\n entity = run_path.parent.parent.stem\n model_artifact_name = 'run_' + run_id + '_model'\n return entity, project, run_id, model_artifact_name\n\n\ndef check_wandb_resume(opt):\n process_wandb_config_ddp_mode(opt) if RANK not in [-1, 0] else None\n if isinstance(opt.resume, str):\n if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):\n if RANK not in [-1, 0]: # For resuming DDP runs\n entity, project, run_id, model_artifact_name = get_run_info(opt.resume)\n api = wandb.Api()\n artifact = api.artifact(entity + '/' + project + '/' + model_artifact_name + ':latest')\n modeldir = artifact.download()\n opt.weights = str(Path(modeldir) / \"last.pt\")\n return True\n return None\n\n\ndef process_wandb_config_ddp_mode(opt):\n with open(check_file(opt.data), errors='ignore') as f:\n data_dict = yaml.safe_load(f) # data dict\n train_dir, val_dir = None, None\n if isinstance(data_dict['train'], str) and data_dict['train'].startswith(WANDB_ARTIFACT_PREFIX):\n api = wandb.Api()\n train_artifact = api.artifact(remove_prefix(data_dict['train']) + ':' + opt.artifact_alias)\n train_dir = train_artifact.download()\n train_path = Path(train_dir) / 'data/images/'\n data_dict['train'] = str(train_path)\n\n if isinstance(data_dict['eval'], str) and data_dict['eval'].startswith(WANDB_ARTIFACT_PREFIX):\n api = wandb.Api()\n val_artifact = api.artifact(remove_prefix(data_dict['eval']) + ':' + opt.artifact_alias)\n val_dir = val_artifact.download()\n val_path = Path(val_dir) / 'data/images/'\n data_dict['eval'] = str(val_path)\n if train_dir or val_dir:\n ddp_data_path = str(Path(val_dir) / 'wandb_local_data.yaml')\n with open(ddp_data_path, 'w') as f:\n yaml.safe_dump(data_dict, f)\n opt.data = ddp_data_path\n\n\nclass WandbLogger():\n \"\"\"Log training runs, datasets, models, and predictions to Weights & Biases.\n\n This logger sends information to W&B at wandb.ai. By default, this information\n includes hyperparameters, system configuration and metrics, model metrics,\n and basic data metrics and analyses.\n\n By providing additional command line arguments to train.py, datasets,\n models and predictions can also be logged.\n\n For more on how this logger is used, see the Weights & Biases documentation:\n https://docs.wandb.com/guides/integrations/yolov5\n \"\"\"\n\n def __init__(self, opt, run_id=None, job_type='Training'):\n \"\"\"\n - Initialize WandbLogger instance\n - Upload dataset if opt.upload_dataset is True\n - Setup trainig processes if job_type is 'Training'\n\n arguments:\n opt (namespace) -- Commandline arguments for this run\n run_id (str) -- Run ID of W&B run to be resumed\n job_type (str) -- To set the job_type for this run\n\n \"\"\"\n # Pre-training routine --\n self.job_type = job_type\n self.wandb, self.wandb_run = wandb, None if not wandb else wandb.run\n self.val_artifact, self.train_artifact = None, None\n self.train_artifact_path, self.val_artifact_path = None, None\n self.result_artifact = None\n self.val_table, self.result_table = None, None\n self.bbox_media_panel_images = []\n self.val_table_path_map = None\n self.max_imgs_to_log = 16\n self.wandb_artifact_data_dict = None\n self.data_dict = None\n # It's more elegant to stick to 1 wandb.init call,\n # but useful config data is overwritten in the WandbLogger's wandb.init call\n if isinstance(opt.resume, str): # checks resume from artifact\n if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):\n entity, project, run_id, model_artifact_name = get_run_info(opt.resume)\n model_artifact_name = WANDB_ARTIFACT_PREFIX + model_artifact_name\n assert wandb, 'install wandb to resume wandb runs'\n # Resume wandb-artifact:// runs here| workaround for not overwriting wandb.config\n self.wandb_run = wandb.init(\n id=run_id,\n project=project,\n entity=entity,\n resume='allow',\n allow_val_change=True\n )\n opt.resume = model_artifact_name\n elif self.wandb:\n self.wandb_run = wandb.init(\n config=opt,\n resume=\"allow\",\n project='YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem,\n entity=opt.entity,\n name=opt.name if opt.name != 'exp' else None,\n job_type=job_type,\n id=run_id,\n allow_val_change=True\n ) if not wandb.run else wandb.run\n if self.wandb_run:\n if self.job_type == 'Training':\n if opt.upload_dataset:\n if not opt.resume:\n self.wandb_artifact_data_dict = self.check_and_upload_dataset(opt)\n\n if opt.resume:\n # resume from artifact\n if isinstance(opt.resume, str) and opt.resume.startswith(WANDB_ARTIFACT_PREFIX):\n self.data_dict = dict(self.wandb_run.config.data_dict)\n else: # local resume\n self.data_dict = check_wandb_dataset(opt.data)\n else:\n self.data_dict = check_wandb_dataset(opt.data)\n self.wandb_artifact_data_dict = self.wandb_artifact_data_dict or self.data_dict\n\n # write data_dict to config. useful for resuming from artifacts. Do this only when not resuming.\n self.wandb_run.config.update({'data_dict': self.wandb_artifact_data_dict}, allow_val_change=True)\n self.setup_training(opt)\n\n if self.job_type == 'Dataset Creation':\n self.wandb_run.config.update({\"upload_dataset\": True})\n self.data_dict = self.check_and_upload_dataset(opt)\n\n def check_and_upload_dataset(self, opt):\n \"\"\"\n Check if the dataset format is compatible and upload it as W&B artifact\n\n arguments:\n opt (namespace)-- Commandline arguments for current run\n\n returns:\n Updated dataset info dictionary where local dataset paths are replaced by WAND_ARFACT_PREFIX links.\n \"\"\"\n assert wandb, 'Install wandb to upload dataset'\n config_path = self.log_dataset_artifact(\n opt.data, opt.single_cls,\n 'YOLOv5' if opt.project == 'runs/train' else Path(opt.project).stem\n )\n with open(config_path, errors='ignore') as f:\n wandb_data_dict = yaml.safe_load(f)\n return wandb_data_dict\n\n def setup_training(self, opt):\n \"\"\"\n Setup the necessary processes for training YOLO models:\n - Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX\n - Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded\n - Setup log_dict, initialize bbox_interval\n\n arguments:\n opt (namespace) -- commandline arguments for this run\n\n \"\"\"\n self.log_dict, self.current_epoch = {}, 0\n self.bbox_interval = opt.bbox_interval\n if isinstance(opt.resume, str):\n modeldir, _ = self.download_model_artifact(opt)\n if modeldir:\n self.weights = Path(modeldir) / \"last.pt\"\n config = self.wandb_run.config\n opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = str(\n self.weights\n ), config.save_period, config.batch_size, config.bbox_interval, config.epochs, \\\n config.hyp, config.imgsz\n data_dict = self.data_dict\n if self.val_artifact is None: # If --upload_dataset is set, use the existing artifact, don't download\n self.train_artifact_path, self.train_artifact = self.download_dataset_artifact(\n data_dict.get('train'), opt.artifact_alias\n )\n self.val_artifact_path, self.val_artifact = self.download_dataset_artifact(\n data_dict.get('eval'), opt.artifact_alias\n )\n\n if self.train_artifact_path is not None:\n train_path = Path(self.train_artifact_path) / 'data/images/'\n data_dict['train'] = str(train_path)\n if self.val_artifact_path is not None:\n val_path = Path(self.val_artifact_path) / 'data/images/'\n data_dict['eval'] = str(val_path)\n\n if self.val_artifact is not None:\n self.result_artifact = wandb.Artifact(\"run_\" + wandb.run.id + \"_progress\", \"evaluation\")\n columns = [\"epoch\", \"id\", \"ground truth\", \"prediction\"]\n columns.extend(self.data_dict['names'])\n self.result_table = wandb.Table(columns)\n self.val_table = self.val_artifact.get(\"eval\")\n if self.val_table_path_map is None:\n self.map_val_table_path()\n if opt.bbox_interval == -1:\n self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1\n if opt.evolve or opt.noplots:\n self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval\n train_from_artifact = self.train_artifact_path is not None and self.val_artifact_path is not None\n # Update the the data_dict to point to local artifacts dir\n if train_from_artifact:\n self.data_dict = data_dict\n\n def download_dataset_artifact(self, path, alias):\n \"\"\"\n download the model checkpoint artifact if the path starts with WANDB_ARTIFACT_PREFIX\n\n arguments:\n path -- path of the dataset to be used for training\n alias (str)-- alias of the artifact to be download/used for training\n\n returns:\n (str, wandb.Artifact) -- path of the downladed dataset and it's corresponding artifact object if dataset\n is found otherwise returns (None, None)\n \"\"\"\n if isinstance(path, str) and path.startswith(WANDB_ARTIFACT_PREFIX):\n artifact_path = Path(remove_prefix(path, WANDB_ARTIFACT_PREFIX) + \":\" + alias)\n dataset_artifact = wandb.use_artifact(artifact_path.as_posix().replace(\"\\\\\", \"/\"))\n assert dataset_artifact is not None, \"'Error: W&B dataset artifact doesn\\'t exist'\"\n datadir = dataset_artifact.download()\n return datadir, dataset_artifact\n return None, None\n\n def download_model_artifact(self, opt):\n \"\"\"\n download the model checkpoint artifact if the resume path starts with WANDB_ARTIFACT_PREFIX\n\n arguments:\n opt (namespace) -- Commandline arguments for this run\n \"\"\"\n if opt.resume.startswith(WANDB_ARTIFACT_PREFIX):\n model_artifact = wandb.use_artifact(remove_prefix(opt.resume, WANDB_ARTIFACT_PREFIX) + \":latest\")\n assert model_artifact is not None, 'Error: W&B model artifact doesn\\'t exist'\n modeldir = model_artifact.download()\n # epochs_trained = model_artifact.metadata.get('epochs_trained')\n total_epochs = model_artifact.metadata.get('total_epochs')\n is_finished = total_epochs is None\n assert not is_finished, 'training is finished, can only resume incomplete runs.'\n return modeldir, model_artifact\n return None, None\n\n def log_model(self, path, opt, epoch, fitness_score, best_model=False):\n \"\"\"\n Log the model checkpoint as W&B artifact\n\n arguments:\n path (Path) -- Path of directory containing the checkpoints\n opt (namespace) -- Command line arguments for this run\n epoch (int) -- Current epoch number\n fitness_score (float) -- fitness score for current epoch\n best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.\n \"\"\"\n model_artifact = wandb.Artifact(\n 'run_' + wandb.run.id + '_model',\n type='model',\n metadata={\n 'original_url': str(path),\n 'epochs_trained': epoch + 1,\n 'save period': opt.save_period,\n 'project': opt.project,\n 'total_epochs': opt.epochs,\n 'fitness_score': fitness_score}\n )\n model_artifact.add_file(str(path / 'last.pt'), name='last.pt')\n wandb.log_artifact(\n model_artifact,\n aliases=['latest', 'last', 'epoch ' + str(self.current_epoch), 'best' if best_model else '']\n )\n LOGGER.info(f\"Saving model artifact on epoch {epoch + 1}\")\n\n def log_dataset_artifact(self, data_file, single_cls, project, overwrite_config=False):\n \"\"\"\n Log the dataset as W&B artifact and return the new data file with W&B links\n\n arguments:\n data_file (str) -- the .yaml file with information about the dataset like - path, classes etc.\n single_class (boolean) -- train multi-class data as single-class\n project (str) -- project name. Used to construct the artifact path\n overwrite_config (boolean) -- overwrites the data.yaml file if set to true otherwise creates a new\n file with _wandb postfix. Eg -> data_wandb.yaml\n\n returns:\n the new .yaml file with artifact links. it can be used to start training directly from artifacts\n \"\"\"\n upload_dataset = self.wandb_run.config.upload_dataset\n log_val_only = isinstance(upload_dataset, str) and upload_dataset == 'eval'\n self.data_dict = check_dataset(data_file) # parse and check\n data = dict(self.data_dict)\n nc, names = (1, ['item']) if single_cls else (int(data['nc']), data['names'])\n names = {k: v for k, v in enumerate(names)} # to index dictionary\n\n # log train set\n if not log_val_only:\n self.train_artifact = self.create_dataset_table(\n LoadImagesAndLabels(data['train'], rect=True, batch_size=1),\n names,\n name='train'\n ) if data.get('train') else None\n if data.get('train'):\n data['train'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'train')\n\n self.val_artifact = self.create_dataset_table(\n LoadImagesAndLabels(data['eval'], rect=True, batch_size=1), names, name='eval'\n ) if data.get('eval') else None\n if data.get('eval'):\n data['eval'] = WANDB_ARTIFACT_PREFIX + str(Path(project) / 'eval')\n\n path = Path(data_file)\n # create a _wandb.yaml file with artifacts links if both train and test set are logged\n if not log_val_only:\n path = (path.stem if overwrite_config else path.stem + '_wandb') + '.yaml' # updated data.yaml path\n path = ROOT / 'data' / path\n data.pop('download', None)\n data.pop('path', None)\n with open(path, 'w') as f:\n yaml.safe_dump(data, f)\n LOGGER.info(f\"Created dataset config file {path}\")\n\n if self.job_type == 'Training': # builds correct artifact pipeline graph\n if not log_val_only:\n self.wandb_run.log_artifact(\n self.train_artifact\n ) # calling use_artifact downloads the dataset. NOT NEEDED!\n self.wandb_run.use_artifact(self.val_artifact)\n self.val_artifact.wait()\n self.val_table = self.val_artifact.get('eval')\n self.map_val_table_path()\n else:\n self.wandb_run.log_artifact(self.train_artifact)\n self.wandb_run.log_artifact(self.val_artifact)\n return path\n\n def map_val_table_path(self):\n \"\"\"\n Map the validation dataset Table like name of file -> it's id in the W&B Table.\n Useful for - referencing artifacts for evaluation.\n \"\"\"\n self.val_table_path_map = {}\n LOGGER.info(\"Mapping dataset\")\n for i, data in enumerate(tqdm(self.val_table.data)):\n self.val_table_path_map[data[3]] = data[0]\n\n def create_dataset_table(self, dataset: LoadImagesAndLabels, class_to_id: Dict[int, str], name: str = 'dataset'):\n \"\"\"\n Create and return W&B artifact containing W&B Table of the dataset.\n\n arguments:\n dataset -- instance of LoadImagesAndLabels class used to iterate over the data to build Table\n class_to_id -- hash map that maps class ids to labels\n name -- name of the artifact\n\n returns:\n dataset artifact to be logged or used\n \"\"\"\n # TODO: Explore multiprocessing to slpit this loop parallely| This is essential for speeding up the the logging\n artifact = wandb.Artifact(name=name, type=\"dataset\")\n img_files = tqdm([dataset.path]) if isinstance(dataset.path, str) and Path(dataset.path).is_dir() else None\n img_files = tqdm(dataset.im_files) if not img_files else img_files\n for img_file in img_files:\n if Path(img_file).is_dir():\n artifact.add_dir(img_file, name='data/images')\n labels_path = 'labels'.join(dataset.path.rsplit('images', 1))\n artifact.add_dir(labels_path, name='data/labels')\n else:\n artifact.add_file(img_file, name='data/images/' + Path(img_file).name)\n label_file = Path(img2label_paths([img_file])[0])\n artifact.add_file(\n str(label_file), name='data/labels/' +\n label_file.name\n ) if label_file.exists() else None\n table = wandb.Table(columns=[\"id\", \"train_image\", \"Classes\", \"name\"])\n class_set = wandb.Classes([{'id': id, 'name': name} for id, name in class_to_id.items()])\n for si, (img, labels, paths, shapes) in enumerate(tqdm(dataset)):\n box_data, img_classes = [], {}\n for cls, *xywh in labels[:, 1:].tolist():\n cls = int(cls)\n box_data.append(\n {\n \"position\": {\n \"middle\": [xywh[0], xywh[1]],\n \"width\": xywh[2],\n \"height\": xywh[3]},\n \"class_id\": cls,\n \"box_caption\": \"%s\" % (class_to_id[cls])}\n )\n img_classes[cls] = class_to_id[cls]\n boxes = {\"ground_truth\": {\"box_data\": box_data, \"class_labels\": class_to_id}} # inference-space\n table.add_data(\n si, wandb.Image(paths, classes=class_set, boxes=boxes), list(img_classes.values()),\n Path(paths).name\n )\n artifact.add(table, name)\n return artifact\n\n def log_training_progress(self, predn, path, names):\n \"\"\"\n Build evaluation Table. Uses reference from validation dataset table.\n\n arguments:\n predn (list): list of predictions in the native space in the format - [xmin, ymin, xmax, ymax, confidence, class]\n path (str): local path of the current evaluation image\n names (dict(int, str)): hash map that maps class ids to labels\n \"\"\"\n class_set = wandb.Classes([{'id': id, 'name': name} for id, name in names.items()])\n box_data = []\n avg_conf_per_class = [0] * len(self.data_dict['names'])\n pred_class_count = {}\n for *xyxy, conf, cls in predn.tolist():\n if conf >= 0.25:\n cls = int(cls)\n box_data.append(\n {\n \"position\": {\n \"minX\": xyxy[0],\n \"minY\": xyxy[1],\n \"maxX\": xyxy[2],\n \"maxY\": xyxy[3]},\n \"class_id\": cls,\n \"box_caption\": f\"{names[cls]} {conf:.3f}\",\n \"scores\": {\n \"class_score\": conf},\n \"domain\": \"pixel\"}\n )\n avg_conf_per_class[cls] += conf\n\n if cls in pred_class_count:\n pred_class_count[cls] += 1\n else:\n pred_class_count[cls] = 1\n\n for pred_class in pred_class_count.keys():\n avg_conf_per_class[pred_class] = avg_conf_per_class[pred_class] / pred_class_count[pred_class]\n\n boxes = {\"predictions\": {\"box_data\": box_data, \"class_labels\": names}} # inference-space\n id = self.val_table_path_map[Path(path).name]\n self.result_table.add_data(\n self.current_epoch, id, self.val_table.data[id][1],\n wandb.Image(self.val_table.data[id][1], boxes=boxes, classes=class_set),\n *avg_conf_per_class\n )\n\n def val_one_image(self, pred, predn, path, names, im):\n \"\"\"\n Log validation data for one image. updates the result Table if validation dataset is uploaded and log bbox media panel\n\n arguments:\n pred (list): list of scaled predictions in the format - [xmin, ymin, xmax, ymax, confidence, class]\n predn (list): list of predictions in the native space - [xmin, ymin, xmax, ymax, confidence, class]\n path (str): local path of the current evaluation image\n \"\"\"\n if self.val_table and self.result_table: # Log Table if Val dataset is uploaded as artifact\n self.log_training_progress(predn, path, names)\n\n if len(self.bbox_media_panel_images) < self.max_imgs_to_log and self.current_epoch > 0:\n if self.current_epoch % self.bbox_interval == 0:\n box_data = [{\n \"position\": {\n \"minX\": xyxy[0],\n \"minY\": xyxy[1],\n \"maxX\": xyxy[2],\n \"maxY\": xyxy[3]},\n \"class_id\": int(cls),\n \"box_caption\": f\"{names[int(cls)]} {conf:.3f}\",\n \"scores\": {\n \"class_score\": conf},\n \"domain\": \"pixel\"} for *xyxy, conf, cls in pred.tolist()]\n boxes = {\"predictions\": {\"box_data\": box_data, \"class_labels\": names}} # inference-space\n self.bbox_media_panel_images.append(wandb.Image(im, boxes=boxes, caption=path.name))\n\n def log(self, log_dict):\n \"\"\"\n save the metrics to the logging dictionary\n\n arguments:\n log_dict (Dict) -- metrics/media to be logged in current step\n \"\"\"\n if self.wandb_run:\n for key, value in log_dict.items():\n self.log_dict[key] = value\n\n def end_epoch(self, best_result=False):\n \"\"\"\n commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.\n\n arguments:\n best_result (boolean): Boolean representing if the result of this evaluation is best or not\n \"\"\"\n if self.wandb_run:\n with all_logging_disabled():\n if self.bbox_media_panel_images:\n self.log_dict[\"BoundingBoxDebugger\"] = self.bbox_media_panel_images\n try:\n wandb.log(self.log_dict)\n except BaseException as e:\n LOGGER.info(\n f\"An error occurred in wandb logger. The training will proceed without interruption. More info\\n{e}\"\n )\n self.wandb_run.finish()\n self.wandb_run = None\n\n self.log_dict = {}\n self.bbox_media_panel_images = []\n if self.result_artifact:\n self.result_artifact.add(self.result_table, 'result')\n wandb.log_artifact(\n self.result_artifact,\n aliases=[\n 'latest', 'last', 'epoch ' + str(self.current_epoch),\n ('best' if best_result else '')]\n )\n\n wandb.log({\"evaluation\": self.result_table})\n columns = [\"epoch\", \"id\", \"ground truth\", \"prediction\"]\n columns.extend(self.data_dict['names'])\n self.result_table = wandb.Table(columns)\n self.result_artifact = wandb.Artifact(\"run_\" + wandb.run.id + \"_progress\", \"evaluation\")\n\n def finish_run(self):\n \"\"\"\n Log metrics if any and finish the current W&B run\n \"\"\"\n if self.wandb_run:\n if self.log_dict:\n with all_logging_disabled():\n wandb.log(self.log_dict)\n wandb.run.finish()\n\n\n@contextmanager\ndef all_logging_disabled(highest_level=logging.CRITICAL):\n \"\"\" source - https://gist.github.com/simon-weber/7853144\n A context manager that will prevent any logging messages triggered during the body from being processed.\n :param highest_level: the maximum logging level in use.\n This would only need to be changed if a custom level greater than CRITICAL is defined.\n \"\"\"\n previous_level = logging.root.manager.disable\n logging.disable(highest_level)\n try:\n yield\n finally:\n logging.disable(previous_level)\n"
},
{
"path": "module/detect/utils/loss.py",
"content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nLoss functions\n\"\"\"\n\nimport torch\nimport torch.nn as nn\n\nfrom utils.metrics import bbox_iou\nfrom utils.torch_utils import de_parallel\n\n\ndef smooth_BCE(eps=0.1): # https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441\n # return positive, negative label smoothing BCE targets\n return 1.0 - 0.5 * eps, 0.5 * eps\n\n\nclass BCEBlurWithLogitsLoss(nn.Module):\n # BCEwithLogitLoss() with reduced missing label effects.\n def __init__(self, alpha=0.05):\n super().__init__()\n self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()\n self.alpha = alpha\n\n def forward(self, pred, true):\n loss = self.loss_fcn(pred, true)\n pred = torch.sigmoid(pred) # prob from logits\n dx = pred - true # reduce only missing label effects\n # dx = (pred - true).abs() # reduce missing label and false label effects\n alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))\n loss *= alpha_factor\n return loss.mean()\n\n\nclass FocalLoss(nn.Module):\n # Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)\n def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):\n super().__init__()\n self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()\n self.gamma = gamma\n self.alpha = alpha\n self.reduction = loss_fcn.reduction\n self.loss_fcn.reduction = 'none' # required to apply FL to each element\n\n def forward(self, pred, true):\n loss = self.loss_fcn(pred, true)\n # p_t = torch.exp(-loss)\n # loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability\n\n # TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py\n pred_prob = torch.sigmoid(pred) # prob from logits\n p_t = true * pred_prob + (1 - true) * (1 - pred_prob)\n alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)\n modulating_factor = (1.0 - p_t) ** self.gamma\n loss *= alpha_factor * modulating_factor\n\n if self.reduction == 'mean':\n return loss.mean()\n elif self.reduction == 'sum':\n return loss.sum()\n else: # 'none'\n return loss\n\n\nclass QFocalLoss(nn.Module):\n # Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)\n def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):\n super().__init__()\n self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()\n self.gamma = gamma\n self.alpha = alpha\n self.reduction = loss_fcn.reduction\n self.loss_fcn.reduction = 'none' # required to apply FL to each element\n\n def forward(self, pred, true):\n loss = self.loss_fcn(pred, true)\n\n pred_prob = torch.sigmoid(pred) # prob from logits\n alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)\n modulating_factor = torch.abs(true - pred_prob) ** self.gamma\n loss *= alpha_factor * modulating_factor\n\n if self.reduction == 'mean':\n return loss.mean()\n elif self.reduction == 'sum':\n return loss.sum()\n else: # 'none'\n return loss\n\n\nclass ComputeLoss:\n sort_obj_iou = False\n\n # Compute losses\n def __init__(self, model, autobalance=False):\n device = next(model.parameters()).device # get model device\n h = model.hyp # hyperparameters\n\n # Define criteria\n BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device))\n BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device))\n\n # Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3\n self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets\n\n # Focal loss\n g = h['fl_gamma'] # focal loss gamma\n if g > 0:\n BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)\n\n m = de_parallel(model).model[-1] # Detect() module\n self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7\n self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index\n self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance\n self.na = m.na # number of anchors\n self.nc = m.nc # number of classes\n self.nl = m.nl # number of layers\n self.anchors = m.anchors\n self.device = device\n\n def __call__(self, p, targets): # predictions, targets\n lcls = torch.zeros(1, device=self.device) # class loss\n lbox = torch.zeros(1, device=self.device) # box loss\n lobj = torch.zeros(1, device=self.device) # object loss\n tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets\n\n # Losses\n for i, pi in enumerate(p): # layer index, layer predictions\n b, a, gj, gi = indices[i] # image, anchor, gridy, gridx\n tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj\n\n n = b.shape[0] # number of targets\n if n:\n # pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0\n pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions\n\n # Regression\n pxy = pxy.sigmoid() * 2 - 0.5\n pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]\n pbox = torch.cat((pxy, pwh), 1) # predicted box\n iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)\n lbox += (1.0 - iou).mean() # iou loss\n\n # Objectness\n iou = iou.detach().clamp(0).type(tobj.dtype)\n if self.sort_obj_iou:\n j = iou.argsort()\n b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]\n if self.gr < 1:\n iou = (1.0 - self.gr) + self.gr * iou\n tobj[b, a, gj, gi] = iou # iou ratio\n\n # Classification\n if self.nc > 1: # cls loss (only if multiple classes)\n t = torch.full_like(pcls, self.cn, device=self.device) # targets\n t[range(n), tcls[i]] = self.cp\n lcls += self.BCEcls(pcls, t) # BCE\n\n # Append targets to text file\n # with open('targets.txt', 'a') as file:\n # [file.write('%11.5g ' * 4 % tuple(x) + '\\n') for x in torch.cat((txy[i], twh[i]), 1)]\n\n obji = self.BCEobj(pi[..., 4], tobj)\n lobj += obji * self.balance[i] # obj loss\n if self.autobalance:\n self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()\n\n if self.autobalance:\n self.balance = [x / self.balance[self.ssi] for x in self.balance]\n lbox *= self.hyp['box']\n lobj *= self.hyp['obj']\n lcls *= self.hyp['cls']\n bs = tobj.shape[0] # batch size\n\n return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()\n\n def build_targets(self, p, targets):\n # Build targets for compute_loss(), input targets(image,class,x,y,w,h)\n na, nt = self.na, targets.shape[0] # number of anchors, targets\n tcls, tbox, indices, anch = [], [], [], []\n gain = torch.ones(7, device=self.device) # normalized to gridspace gain\n ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)\n targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices\n\n g = 0.5 # bias\n off = torch.tensor(\n [\n [0, 0],\n [1, 0],\n [0, 1],\n [-1, 0],\n [0, -1], # j,k,l,m\n # [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm\n ],\n device=self.device).float() * g # offsets\n\n for i in range(self.nl):\n anchors, shape = self.anchors[i], p[i].shape\n gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain\n\n # Match targets to anchors\n t = targets * gain # shape(3,n,7)\n if nt:\n # Matches\n r = t[..., 4:6] / anchors[:, None] # wh ratio\n j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare\n # j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))\n t = t[j] # filter\n\n # Offsets\n gxy = t[:, 2:4] # grid xy\n gxi = gain[[2, 3]] - gxy # inverse\n j, k = ((gxy % 1 < g) & (gxy > 1)).T\n l, m = ((gxi % 1 < g) & (gxi > 1)).T\n j = torch.stack((torch.ones_like(j), j, k, l, m))\n t = t.repeat((5, 1, 1))[j]\n offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]\n else:\n t = targets[0]\n offsets = 0\n\n # Define\n bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors\n a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class\n gij = (gxy - offsets).long()\n gi, gj = gij.T # grid indices\n\n # Append\n indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid\n tbox.append(torch.cat((gxy - gij, gwh), 1)) # box\n anch.append(anchors[a]) # anchors\n tcls.append(c) # class\n\n return tcls, tbox, indices, anch\n"
},
{
"path": "module/detect/utils/metrics.py",
"content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nModel validation metrics\n\"\"\"\n\nimport math\nimport warnings\nfrom pathlib import Path\n\nimport matplotlib.pyplot as plt\nimport numpy as np\nimport torch\n\n\ndef fitness(x):\n # Model fitness as a weighted combination of metrics\n w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]\n return (x[:, :4] * w).sum(1)\n\n\ndef smooth(y, f=0.05):\n # Box filter of fraction f\n nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)\n p = np.ones(nf // 2) # ones padding\n yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded\n return np.convolve(yp, np.ones(nf) / nf, mode='valid') # y-smoothed\n\n\ndef ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir='.', names=(), eps=1e-16):\n \"\"\" Compute the average precision, given the recall and precision curves.\n Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.\n # Arguments\n tp: True positives (nparray, nx1 or nx10).\n conf: Objectness value from 0-1 (nparray).\n pred_cls: Predicted object classes (nparray).\n target_cls: True object classes (nparray).\n plot: Plot precision-recall curve at mAP@0.5\n save_dir: Plot save directory\n # Returns\n The average precision as computed in py-faster-rcnn.\n \"\"\"\n\n # Sort by objectness\n i = np.argsort(-conf)\n tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]\n\n # Find unique classes\n unique_classes, nt = np.unique(target_cls, return_counts=True)\n nc = unique_classes.shape[0] # number of classes, number of detections\n\n # Create Precision-Recall curve and compute AP for each class\n px, py = np.linspace(0, 1, 1000), [] # for plotting\n ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))\n for ci, c in enumerate(unique_classes):\n i = pred_cls == c\n n_l = nt[ci] # number of labels\n n_p = i.sum() # number of predictions\n if n_p == 0 or n_l == 0:\n continue\n\n # Accumulate FPs and TPs\n fpc = (1 - tp[i]).cumsum(0)\n tpc = tp[i].cumsum(0)\n\n # Recall\n recall = tpc / (n_l + eps) # recall curve\n r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases\n\n # Precision\n precision = tpc / (tpc + fpc) # precision curve\n p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score\n\n # AP from recall-precision curve\n for j in range(tp.shape[1]):\n ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])\n if plot and j == 0:\n py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5\n\n # Compute F1 (harmonic mean of precision and recall)\n f1 = 2 * p * r / (p + r + eps)\n names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data\n names = dict(enumerate(names)) # to dict\n if plot:\n plot_pr_curve(px, py, ap, Path(save_dir) / 'PR_curve.png', names)\n plot_mc_curve(px, f1, Path(save_dir) / 'F1_curve.png', names, ylabel='F1')\n plot_mc_curve(px, p, Path(save_dir) / 'P_curve.png', names, ylabel='Precision')\n plot_mc_curve(px, r, Path(save_dir) / 'R_curve.png', names, ylabel='Recall')\n\n i = smooth(f1.mean(0), 0.1).argmax() # max F1 index\n p, r, f1 = p[:, i], r[:, i], f1[:, i]\n tp = (r * nt).round() # true positives\n fp = (tp / (p + eps) - tp).round() # false positives\n return tp, fp, p, r, f1, ap, unique_classes.astype(int)\n\n\ndef compute_ap(recall, precision):\n \"\"\" Compute the average precision, given the recall and precision curves\n # Arguments\n recall: The recall curve (list)\n precision: The precision curve (list)\n # Returns\n Average precision, precision curve, recall curve\n \"\"\"\n\n # Append sentinel values to beginning and end\n mrec = np.concatenate(([0.0], recall, [1.0]))\n mpre = np.concatenate(([1.0], precision, [0.0]))\n\n # Compute the precision envelope\n mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))\n\n # Integrate area under curve\n method = 'interp' # methods: 'continuous', 'interp'\n if method == 'interp':\n x = np.linspace(0, 1, 101) # 101-point interp (COCO)\n ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate\n else: # 'continuous'\n i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes\n ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve\n\n return ap, mpre, mrec\n\n\nclass ConfusionMatrix:\n # Updated version of https://github.com/kaanakan/object_detection_confusion_matrix\n def __init__(self, nc, conf=0.25, iou_thres=0.45):\n self.matrix = np.zeros((nc + 1, nc + 1))\n self.nc = nc # number of classes\n self.conf = conf\n self.iou_thres = iou_thres\n\n def process_batch(self, detections, labels):\n \"\"\"\n Return intersection-over-union (Jaccard index) of boxes.\n Both sets of boxes are expected to be in (x1, y1, x2, y2) format.\n Arguments:\n detections (Array[N, 6]), x1, y1, x2, y2, conf, class\n labels (Array[M, 5]), class, x1, y1, x2, y2\n Returns:\n None, updates confusion matrix accordingly\n \"\"\"\n detections = detections[detections[:, 4] > self.conf]\n gt_classes = labels[:, 0].int()\n detection_classes = detections[:, 5].int()\n iou = box_iou(labels[:, 1:], detections[:, :4])\n\n x = torch.where(iou > self.iou_thres)\n if x[0].shape[0]:\n matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()\n if x[0].shape[0] > 1:\n matches = matches[matches[:, 2].argsort()[::-1]]\n matches = matches[np.unique(matches[:, 1], return_index=True)[1]]\n matches = matches[matches[:, 2].argsort()[::-1]]\n matches = matches[np.unique(matches[:, 0], return_index=True)[1]]\n else:\n matches = np.zeros((0, 3))\n\n n = matches.shape[0] > 0\n m0, m1, _ = matches.transpose().astype(int)\n for i, gc in enumerate(gt_classes):\n j = m0 == i\n if n and sum(j) == 1:\n self.matrix[detection_classes[m1[j]], gc] += 1 # correct\n else:\n self.matrix[self.nc, gc] += 1 # background FP\n\n if n:\n for i, dc in enumerate(detection_classes):\n if not any(m1 == i):\n self.matrix[dc, self.nc] += 1 # background FN\n\n def matrix(self):\n return self.matrix\n\n def tp_fp(self):\n tp = self.matrix.diagonal() # true positives\n fp = self.matrix.sum(1) - tp # false positives\n # fn = self.matrix.sum(0) - tp # false negatives (missed detections)\n return tp[:-1], fp[:-1] # remove background class\n\n def plot(self, normalize=True, save_dir='', names=()):\n try:\n import seaborn as sn\n\n array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1E-9) if normalize else 1) # normalize columns\n array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)\n\n fig = plt.figure(figsize=(12, 9), tight_layout=True)\n nc, nn = self.nc, len(names) # number of classes, names\n sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size\n labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels\n with warnings.catch_warnings():\n warnings.simplefilter('ignore') # suppress empty matrix RuntimeWarning: All-NaN slice encountered\n sn.heatmap(array,\n annot=nc < 30,\n annot_kws={\n \"size\": 8},\n cmap='Blues',\n fmt='.2f',\n square=True,\n vmin=0.0,\n xticklabels=names + ['background FP'] if labels else \"auto\",\n yticklabels=names + ['background FN'] if labels else \"auto\").set_facecolor((1, 1, 1))\n fig.axes[0].set_xlabel('True')\n fig.axes[0].set_ylabel('Predicted')\n fig.savefig(Path(save_dir) / 'confusion_matrix.png', dpi=250)\n plt.close()\n except Exception as e:\n print(f'WARNING: ConfusionMatrix plot failure: {e}')\n\n def print(self):\n for i in range(self.nc + 1):\n print(' '.join(map(str, self.matrix[i])))\n\n\ndef bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):\n # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)\n\n # Get the coordinates of bounding boxes\n if xywh: # transform from xywh to xyxy\n (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, 1), box2.chunk(4, 1)\n w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2\n b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_\n b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_\n else: # x1, y1, x2, y2 = box1\n b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, 1)\n b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, 1)\n w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1\n w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1\n\n # Intersection area\n inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \\\n (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)\n\n # Union Area\n union = w1 * h1 + w2 * h2 - inter + eps\n\n # IoU\n iou = inter / union\n if CIoU or DIoU or GIoU:\n cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width\n ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height\n if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1\n c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared\n rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2\n if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47\n v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2)\n with torch.no_grad():\n alpha = v / (v - iou + (1 + eps))\n return iou - (rho2 / c2 + v * alpha) # CIoU\n return iou - rho2 / c2 # DIoU\n c_area = cw * ch + eps # convex area\n return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf\n return iou # IoU\n\n\ndef box_area(box):\n # box = xyxy(4,n)\n return (box[2] - box[0]) * (box[3] - box[1])\n\n\ndef box_iou(box1, box2, eps=1e-7):\n # https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py\n \"\"\"\n Return intersection-over-union (Jaccard index) of boxes.\n Both sets of boxes are expected to be in (x1, y1, x2, y2) format.\n Arguments:\n box1 (Tensor[N, 4])\n box2 (Tensor[M, 4])\n Returns:\n iou (Tensor[N, M]): the NxM matrix containing the pairwise\n IoU values for every element in boxes1 and boxes2\n \"\"\"\n\n # inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)\n (a1, a2), (b1, b2) = box1[:, None].chunk(2, 2), box2.chunk(2, 1)\n inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)\n\n # IoU = inter / (area1 + area2 - inter)\n return inter / (box_area(box1.T)[:, None] + box_area(box2.T) - inter + eps)\n\n\ndef bbox_ioa(box1, box2, eps=1e-7):\n \"\"\" Returns the intersection over box2 area given box1, box2. Boxes are x1y1x2y2\n box1: np.array of shape(4)\n box2: np.array of shape(nx4)\n returns: np.array of shape(n)\n \"\"\"\n\n # Get the coordinates of bounding boxes\n b1_x1, b1_y1, b1_x2, b1_y2 = box1\n b2_x1, b2_y1, b2_x2, b2_y2 = box2.T\n\n # Intersection area\n inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * \\\n (np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)).clip(0)\n\n # box2 area\n box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps\n\n # Intersection over box2 area\n return inter_area / box2_area\n\n\ndef wh_iou(wh1, wh2, eps=1e-7):\n # Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2\n wh1 = wh1[:, None] # [N,1,2]\n wh2 = wh2[None] # [1,M,2]\n inter = torch.min(wh1, wh2).prod(2) # [N,M]\n return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)\n\n\n# Plots ----------------------------------------------------------------------------------------------------------------\n\n\ndef plot_pr_curve(px, py, ap, save_dir=Path('pr_curve.png'), names=()):\n # Precision-recall curve\n fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)\n py = np.stack(py, axis=1)\n\n if 0 < len(names) < 21: # display per-class legend if < 21 classes\n for i, y in enumerate(py.T):\n ax.plot(px, y, linewidth=1, label=f'{names[i]} {ap[i, 0]:.3f}') # plot(recall, precision)\n else:\n ax.plot(px, py, linewidth=1, color='grey') # plot(recall, precision)\n\n ax.plot(px, py.mean(1), linewidth=3, color='blue', label='all classes %.3f mAP@0.5' % ap[:, 0].mean())\n ax.set_xlabel('Recall')\n ax.set_ylabel('Precision')\n ax.set_xlim(0, 1)\n ax.set_ylim(0, 1)\n plt.legend(bbox_to_anchor=(1.04, 1), loc=\"upper left\")\n fig.savefig(save_dir, dpi=250)\n plt.close()\n\n\ndef plot_mc_curve(px, py, save_dir=Path('mc_curve.png'), names=(), xlabel='Confidence', ylabel='Metric'):\n # Metric-confidence curve\n fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)\n\n if 0 < len(names) < 21: # display per-class legend if < 21 classes\n for i, y in enumerate(py):\n ax.plot(px, y, linewidth=1, label=f'{names[i]}') # plot(confidence, metric)\n else:\n ax.plot(px, py.T, linewidth=1, color='grey') # plot(confidence, metric)\n\n y = smooth(py.mean(0), 0.05)\n ax.plot(px, y, linewidth=3, color='blue', label=f'all classes {y.max():.2f} at {px[y.argmax()]:.3f}')\n ax.set_xlabel(xlabel)\n ax.set_ylabel(ylabel)\n ax.set_xlim(0, 1)\n ax.set_ylim(0, 1)\n plt.legend(bbox_to_anchor=(1.04, 1), loc=\"upper left\")\n fig.savefig(save_dir, dpi=250)\n plt.close()\n"
},
{
"path": "module/detect/utils/plots.py",
"content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nPlotting utils\n\"\"\"\n\nimport math\nimport os\nfrom copy import copy\nfrom pathlib import Path\nfrom urllib.error import URLError\n\nimport cv2\nimport matplotlib\nimport matplotlib.pyplot as plt\nimport numpy as np\nimport pandas as pd\nimport seaborn as sn\nimport torch\nfrom PIL import Image, ImageDraw, ImageFont\nfrom utils.general import (CONFIG_DIR, FONT, LOGGER, Timeout, check_font, check_requirements, clip_coords,\n increment_path, is_ascii, threaded, try_except, xywh2xyxy, xyxy2xywh)\nfrom utils.metrics import fitness\n\n# Settings\nRANK = int(os.getenv('RANK', -1))\nmatplotlib.rc('font', **{'size': 11})\nmatplotlib.use('Agg') # for writing to files only\n\n\nclass Colors:\n # Ultralytics color palette https://ultralytics.com/\n def __init__(self):\n # hex = matplotlib.colors.TABLEAU_COLORS.values()\n hexs = ('FF3838', 'FF9D97', 'FF701F', 'FFB21D', 'CFD231', '48F90A', '92CC17', '3DDB86', '1A9334', '00D4BB',\n '2C99A8', '00C2FF', '344593', '6473FF', '0018EC', '8438FF', '520085', 'CB38FF', 'FF95C8', 'FF37C7')\n self.palette = [self.hex2rgb(f'#{c}') for c in hexs]\n self.n = len(self.palette)\n\n def __call__(self, i, bgr=False):\n c = self.palette[int(i) % self.n]\n return (c[2], c[1], c[0]) if bgr else c\n\n @staticmethod\n def hex2rgb(h): # rgb order (PIL)\n return tuple(int(h[1 + i:1 + i + 2], 16) for i in (0, 2, 4))\n\n\ncolors = Colors() # create instance for 'from utils.plots import colors'\n\n\ndef check_pil_font(font=FONT, size=10):\n # Return a PIL TrueType Font, downloading to CONFIG_DIR if necessary\n font = Path(font)\n font = font if font.exists() else (CONFIG_DIR / font.name)\n try:\n return ImageFont.truetype(str(font) if font.exists() else font.name, size)\n except Exception: # download if missing\n try:\n check_font(font)\n return ImageFont.truetype(str(font), size)\n except TypeError:\n check_requirements('Pillow>=8.4.0') # known issue https://github.com/ultralytics/yolov5/issues/5374\n except URLError: # not online\n return ImageFont.load_default()\n\n\nclass Annotator:\n # YOLOv5 Annotator for train/eval mosaics and jpgs and detect/hub inference annotations\n def __init__(self, im, line_width=None, font_size=None, font='Arial.ttf', pil=False, example='abc'):\n assert im.data.contiguous, 'Image not contiguous. Apply np.ascontiguousarray(im) to Annotator() input images.'\n non_ascii = not is_ascii(example) # non-latin labels, i.e. asian, arabic, cyrillic\n self.pil = pil or non_ascii\n if self.pil: # use PIL\n self.im = im if isinstance(im, Image.Image) else Image.fromarray(im)\n self.draw = ImageDraw.Draw(self.im)\n self.font = check_pil_font(\n font='Arial.Unicode.ttf' if non_ascii else font,\n size=font_size or max(round(sum(self.im.size) / 2 * 0.035), 12)\n )\n else: # use cv2\n self.im = im\n self.lw = line_width or max(round(sum(im.shape) / 2 * 0.003), 2) # line width\n\n def box_label(self, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):\n # Add one xyxy box to image with label\n if self.pil or not is_ascii(label):\n self.draw.rectangle(box, width=self.lw, outline=color) # box\n if label:\n w, h = self.font.getsize(label) # text width, height\n outside = box[1] - h >= 0 # label fits outside box\n self.draw.rectangle(\n (box[0], box[1] - h if outside else box[1], box[0] + w + 1,\n box[1] + 1 if outside else box[1] + h + 1),\n fill=color,\n )\n # self.draw.text((box[0], box[1]), label, fill=txt_color, font=self.font, anchor='ls') # for PIL>8.0\n self.draw.text((box[0], box[1] - h if outside else box[1]), label, fill=txt_color, font=self.font)\n else: # cv2\n p1, p2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))\n cv2.rectangle(self.im, p1, p2, color, thickness=self.lw, lineType=cv2.LINE_AA)\n if label:\n tf = max(self.lw - 1, 1) # font thickness\n w, h = cv2.getTextSize(label, 0, fontScale=self.lw / 3, thickness=tf)[0] # text width, height\n outside = p1[1] - h >= 3\n p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3\n cv2.rectangle(self.im, p1, p2, color, -1, cv2.LINE_AA) # filled\n cv2.putText(\n self.im,\n label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),\n 0,\n self.lw / 3,\n txt_color,\n thickness=tf,\n lineType=cv2.LINE_AA\n )\n\n def rectangle(self, xy, fill=None, outline=None, width=1):\n # Add rectangle to image (PIL-only)\n self.draw.rectangle(xy, fill, outline, width)\n\n def text(self, xy, text, txt_color=(255, 255, 255)):\n # Add text to image (PIL-only)\n w, h = self.font.getsize(text) # text width, height\n self.draw.text((xy[0], xy[1] - h + 1), text, fill=txt_color, font=self.font)\n\n def result(self):\n # Return annotated image as array\n return np.asarray(self.im)\n\n\ndef feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):\n \"\"\"\n x: Features to be visualized\n module_type: Module type\n stage: Module stage within model\n n: Maximum number of feature maps to plot\n save_dir: Directory to save results\n \"\"\"\n if 'Detect' not in module_type:\n batch, channels, height, width = x.shape # batch, channels, height, width\n if height > 1 and width > 1:\n f = save_dir / f\"stage{stage}_{module_type.split('.')[-1]}_features.png\" # filename\n\n blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels\n n = min(n, channels) # number of plots\n fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols\n ax = ax.ravel()\n plt.subplots_adjust(wspace=0.05, hspace=0.05)\n for i in range(n):\n ax[i].imshow(blocks[i].squeeze()) # cmap='gray'\n ax[i].axis('off')\n\n LOGGER.info(f'Saving {f}... ({n}/{channels})')\n plt.savefig(f, dpi=300, bbox_inches='tight')\n plt.close()\n np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save\n\n\ndef hist2d(x, y, n=100):\n # 2d histogram used in labels.png and evolve.png\n xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)\n hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))\n xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)\n yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)\n return np.log(hist[xidx, yidx])\n\n\ndef butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):\n from scipy.signal import butter, filtfilt\n\n # https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy\n def butter_lowpass(cutoff, fs, order):\n nyq = 0.5 * fs\n normal_cutoff = cutoff / nyq\n return butter(order, normal_cutoff, btype='low', analog=False)\n\n b, a = butter_lowpass(cutoff, fs, order=order)\n return filtfilt(b, a, data) # forward-backward filter\n\n\ndef output_to_target(output):\n # Convert model output to target format [batch_id, class_id, x, y, w, h, conf]\n targets = []\n for i, o in enumerate(output):\n for *box, conf, cls in o.cpu().numpy():\n targets.append([i, cls, *list(*xyxy2xywh(np.array(box)[None])), conf])\n return np.array(targets)\n\n\n@threaded\ndef plot_images(images, targets, paths=None, fname='images.jpg', names=None, max_size=1920, max_subplots=16):\n # Plot image grid with labels\n if isinstance(images, torch.Tensor):\n images = images.cpu().float().numpy()\n if isinstance(targets, torch.Tensor):\n targets = targets.cpu().numpy()\n if np.max(images[0]) <= 1:\n images *= 255 # de-normalise (optional)\n bs, _, h, w = images.shape # batch size, _, height, width\n bs = min(bs, max_subplots) # limit plot images\n ns = np.ceil(bs ** 0.5) # number of subplots (square)\n\n # Build Image\n mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init\n for i, im in enumerate(images):\n if i == max_subplots: # if last batch has fewer images than we expect\n break\n x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin\n im = im.transpose(1, 2, 0)\n mosaic[y:y + h, x:x + w, :] = im\n\n # Resize (optional)\n scale = max_size / ns / max(h, w)\n if scale < 1:\n h = math.ceil(scale * h)\n w = math.ceil(scale * w)\n mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))\n\n # Annotate\n fs = int((h + w) * ns * 0.01) # font size\n annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)\n for i in range(i + 1):\n x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin\n annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders\n if paths:\n annotator.text((x + 5, y + 5 + h), text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames\n if len(targets) > 0:\n ti = targets[targets[:, 0] == i] # image targets\n boxes = xywh2xyxy(ti[:, 2:6]).T\n classes = ti[:, 1].astype('int')\n labels = ti.shape[1] == 6 # labels if no conf column\n conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)\n\n if boxes.shape[1]:\n if boxes.max() <= 1.01: # if normalized with tolerance 0.01\n boxes[[0, 2]] *= w # scale to pixels\n boxes[[1, 3]] *= h\n elif scale < 1: # absolute coords need scale if image scales\n boxes *= scale\n boxes[[0, 2]] += x\n boxes[[1, 3]] += y\n for j, box in enumerate(boxes.T.tolist()):\n cls = classes[j]\n color = colors(cls)\n cls = names[cls] if names else cls\n if labels or conf[j] > 0.25: # 0.25 conf thresh\n label = f'{cls}' if labels else f'{cls} {conf[j]:.1f}'\n annotator.box_label(box, label, color=color)\n annotator.im.save(fname) # save\n\n\ndef plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=''):\n # Plot LR simulating training for full epochs\n optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals\n y = []\n for _ in range(epochs):\n scheduler.step()\n y.append(optimizer.param_groups[0]['lr'])\n plt.plot(y, '.-', label='LR')\n plt.xlabel('epoch')\n plt.ylabel('LR')\n plt.grid()\n plt.xlim(0, epochs)\n plt.ylim(0)\n plt.savefig(Path(save_dir) / 'LR.png', dpi=200)\n plt.close()\n\n\ndef plot_val_txt(): # from utils.plots import *; plot_val()\n # Plot eval.txt histograms\n x = np.loadtxt('eval.txt', dtype=np.float32)\n box = xyxy2xywh(x[:, :4])\n cx, cy = box[:, 0], box[:, 1]\n\n fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)\n ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)\n ax.set_aspect('equal')\n plt.savefig('hist2d.png', dpi=300)\n\n fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)\n ax[0].hist(cx, bins=600)\n ax[1].hist(cy, bins=600)\n plt.savefig('hist1d.png', dpi=200)\n\n\ndef plot_targets_txt(): # from utils.plots import *; plot_targets_txt()\n # Plot targets.txt histograms\n x = np.loadtxt('targets.txt', dtype=np.float32).T\n s = ['x targets', 'y targets', 'width targets', 'height targets']\n fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)\n ax = ax.ravel()\n for i in range(4):\n ax[i].hist(x[i], bins=100, label=f'{x[i].mean():.3g} +/- {x[i].std():.3g}')\n ax[i].legend()\n ax[i].set_title(s[i])\n plt.savefig('targets.jpg', dpi=200)\n\n\ndef plot_val_study(file='', dir='', x=None): # from utils.plots import *; plot_val_study()\n # Plot file=study.txt generated by eval.py (or plot all study*.txt in dir)\n save_dir = Path(file).parent if file else Path(dir)\n plot2 = False # plot additional results\n if plot2:\n ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()\n\n fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)\n # for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:\n for f in sorted(save_dir.glob('study*.txt')):\n y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T\n x = np.arange(y.shape[1]) if x is None else np.array(x)\n if plot2:\n s = ['P', 'R', 'mAP@.5', 'mAP@.5:.95', 't_preprocess (ms/img)', 't_inference (ms/img)', 't_NMS (ms/img)']\n for i in range(7):\n ax[i].plot(x, y[i], '.-', linewidth=2, markersize=8)\n ax[i].set_title(s[i])\n\n j = y[3].argmax() + 1\n ax2.plot(\n y[5, 1:j],\n y[3, 1:j] * 1E2,\n '.-',\n linewidth=2,\n markersize=8,\n label=f.stem.replace('study_coco_', '').replace('yolo', 'YOLO')\n )\n\n ax2.plot(\n 1E3 / np.array([209, 140, 97, 58, 35, 18]), [34.6, 40.5, 43.0, 47.5, 49.7, 51.5],\n 'k.-',\n linewidth=2,\n markersize=8,\n alpha=.25,\n label='EfficientDet'\n )\n\n ax2.grid(alpha=0.2)\n ax2.set_yticks(np.arange(20, 60, 5))\n ax2.set_xlim(0, 57)\n ax2.set_ylim(25, 55)\n ax2.set_xlabel('GPU Speed (ms/img)')\n ax2.set_ylabel('COCO AP eval')\n ax2.legend(loc='lower right')\n f = save_dir / 'study.png'\n print(f'Saving {f}...')\n plt.savefig(f, dpi=300)\n\n\n@try_except # known issue https://github.com/ultralytics/yolov5/issues/5395\n@Timeout(30) # known issue https://github.com/ultralytics/yolov5/issues/5611\ndef plot_labels(labels, names=(), save_dir=Path('')):\n # plot dataset labels\n LOGGER.info(f\"Plotting labels to {save_dir / 'labels.jpg'}... \")\n c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes\n nc = int(c.max() + 1) # number of classes\n x = pd.DataFrame(b.transpose(), columns=['x', 'y', 'width', 'height'])\n\n # seaborn correlogram\n sn.pairplot(x, corner=True, diag_kind='auto', kind='hist', diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))\n plt.savefig(save_dir / 'labels_correlogram.jpg', dpi=200)\n plt.close()\n\n # matplotlib labels\n matplotlib.use('svg') # faster\n ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()\n y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)\n try: # color histogram bars by class\n [y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195\n except Exception:\n pass\n ax[0].set_ylabel('instances')\n if 0 < len(names) < 30:\n ax[0].set_xticks(range(len(names)))\n ax[0].set_xticklabels(names, rotation=90, fontsize=10)\n else:\n ax[0].set_xlabel('classes')\n sn.histplot(x, x='x', y='y', ax=ax[2], bins=50, pmax=0.9)\n sn.histplot(x, x='width', y='height', ax=ax[3], bins=50, pmax=0.9)\n\n # rectangles\n labels[:, 1:3] = 0.5 # center\n labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000\n img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)\n for cls, *box in labels[:1000]:\n ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot\n ax[1].imshow(img)\n ax[1].axis('off')\n\n for a in [0, 1, 2, 3]:\n for s in ['top', 'right', 'left', 'bottom']:\n ax[a].spines[s].set_visible(False)\n\n plt.savefig(save_dir / 'labels.jpg', dpi=200)\n matplotlib.use('Agg')\n plt.close()\n\n\ndef plot_evolve(evolve_csv='path/to/evolve.csv'): # from utils.plots import *; plot_evolve()\n # Plot evolve.csv hyp evolution results\n evolve_csv = Path(evolve_csv)\n data = pd.read_csv(evolve_csv)\n keys = [x.strip() for x in data.columns]\n x = data.values\n f = fitness(x)\n j = np.argmax(f) # max fitness index\n plt.figure(figsize=(10, 12), tight_layout=True)\n matplotlib.rc('font', **{'size': 8})\n print(f'Best results from row {j} of {evolve_csv}:')\n for i, k in enumerate(keys[7:]):\n v = x[:, 7 + i]\n mu = v[j] # best single result\n plt.subplot(6, 5, i + 1)\n plt.scatter(v, f, c=hist2d(v, f, 20), cmap='viridis', alpha=.8, edgecolors='none')\n plt.plot(mu, f.max(), 'k+', markersize=15)\n plt.title(f'{k} = {mu:.3g}', fontdict={'size': 9}) # limit to 40 characters\n if i % 5 != 0:\n plt.yticks([])\n print(f'{k:>15}: {mu:.3g}')\n f = evolve_csv.with_suffix('.png') # filename\n plt.savefig(f, dpi=200)\n plt.close()\n print(f'Saved {f}')\n\n\ndef plot_results(file='path/to/results.csv', dir=''):\n # Plot training results.csv. Usage: from utils.plots import *; plot_results('path/to/results.csv')\n save_dir = Path(file).parent if file else Path(dir)\n fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)\n ax = ax.ravel()\n files = list(save_dir.glob('results*.csv'))\n assert len(files), f'No results.csv files found in {save_dir.resolve()}, nothing to plot.'\n for f in files:\n try:\n data = pd.read_csv(f)\n s = [x.strip() for x in data.columns]\n x = data.values[:, 0]\n for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):\n y = data.values[:, j].astype('float')\n # y[y == 0] = np.nan # don't show zero values\n ax[i].plot(x, y, marker='.', label=f.stem, linewidth=2, markersize=8)\n ax[i].set_title(s[j], fontsize=12)\n # if j in [8, 9, 10]: # share train and eval loss y axes\n # ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])\n except Exception as e:\n LOGGER.info(f'Warning: Plotting error for {f}: {e}')\n ax[1].legend()\n fig.savefig(save_dir / 'results.png', dpi=200)\n plt.close()\n\n\ndef profile_idetection(start=0, stop=0, labels=(), save_dir=''):\n # Plot iDetection '*.txt' per-image logs. from utils.plots import *; profile_idetection()\n ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()\n s = ['Images', 'Free Storage (GB)', 'RAM Usage (GB)', 'Battery', 'dt_raw (ms)', 'dt_smooth (ms)', 'real-world FPS']\n files = list(Path(save_dir).glob('frames*.txt'))\n for fi, f in enumerate(files):\n try:\n results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows\n n = results.shape[1] # number of rows\n x = np.arange(start, min(stop, n) if stop else n)\n results = results[:, x]\n t = (results[0] - results[0].min()) # set t0=0s\n results[0] = x\n for i, a in enumerate(ax):\n if i < len(results):\n label = labels[fi] if len(labels) else f.stem.replace('frames_', '')\n a.plot(t, results[i], marker='.', label=label, linewidth=1, markersize=5)\n a.set_title(s[i])\n a.set_xlabel('time (s)')\n # if fi == len(files) - 1:\n # a.set_ylim(bottom=0)\n for side in ['top', 'right']:\n a.spines[side].set_visible(False)\n else:\n a.remove()\n except Exception as e:\n print(f'Warning: Plotting error for {f}; {e}')\n ax[1].legend()\n plt.savefig(Path(save_dir) / 'idetection_profile.png', dpi=200)\n\n\ndef save_one_box(xyxy, im, file=Path('im.jpg'), gain=1.02, pad=10, square=False, BGR=False, save=True):\n # Save image crop as {file} with crop size multiple {gain} and {pad} pixels. Save and/or return crop\n xyxy = torch.tensor(xyxy).view(-1, 4)\n b = xyxy2xywh(xyxy) # boxes\n if square:\n b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square\n b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad\n xyxy = xywh2xyxy(b).long()\n clip_coords(xyxy, im.shape)\n crop = im[int(xyxy[0, 1]):int(xyxy[0, 3]), int(xyxy[0, 0]):int(xyxy[0, 2]), ::(1 if BGR else -1)]\n if save:\n file.parent.mkdir(parents=True, exist_ok=True) # make directory\n f = str(increment_path(file).with_suffix('.jpg'))\n # cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue\n Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB\n return crop\n"
},
{
"path": "module/detect/utils/torch_utils.py",
"content": "# YOLOv5 🚀 by Ultralytics, GPL-3.0 license\n\"\"\"\nPyTorch utils\n\"\"\"\n\nimport math\nimport os\nimport platform\nimport subprocess\nimport time\nimport warnings\nfrom contextlib import contextmanager\nfrom copy import deepcopy\nfrom pathlib import Path\n\nimport torch\nimport torch.distributed as dist\nimport torch.nn as nn\nimport torch.nn.functional as F\nfrom torch.nn.parallel import DistributedDataParallel as DDP\nfrom utils.general import LOGGER, check_version, colorstr, file_date, git_describe\n\nLOCAL_RANK = int(os.getenv('LOCAL_RANK', -1)) # https://pytorch.org/docs/stable/elastic/run.html\nRANK = int(os.getenv('RANK', -1))\nWORLD_SIZE = int(os.getenv('WORLD_SIZE', 1))\n\ntry:\n import thop # for FLOPs computation\nexcept ImportError:\n thop = None\n\n# Suppress PyTorch warnings\nwarnings.filterwarnings('ignore', message='User provided device_type of \\'cuda\\', but CUDA is not available. Disabling')\n\n\ndef smart_DDP(model):\n # Model DDP creation with checks\n assert not check_version(torch.__version__, '1.12.0', pinned=True), \\\n 'torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. ' \\\n 'Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395'\n if check_version(torch.__version__, '1.11.0'):\n return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)\n else:\n return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)\n\n\n@contextmanager\ndef torch_distributed_zero_first(local_rank: int):\n # Decorator to make all processes in distributed training wait for each local_master to do something\n if local_rank not in [-1, 0]:\n dist.barrier(device_ids=[local_rank])\n yield\n if local_rank == 0:\n dist.barrier(device_ids=[0])\n\n\ndef device_count():\n # Returns number of CUDA devices available. Safe version of torch.cuda.device_count(). Supports Linux and Windows\n assert platform.system() in ('Linux', 'Windows'), 'device_count() only supported on Linux or Windows'\n try:\n cmd = 'nvidia-smi -L | wc -l' if platform.system() == 'Linux' else 'nvidia-smi -L | find /c /v \"\"' # Windows\n return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])\n except Exception:\n return 0\n\n\ndef select_device(device='', batch_size=0, newline=True):\n # device = None or 'cpu' or 0 or '0' or '0,1,2,3'\n s = f'YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} '\n device = str(device).strip().lower().replace('cuda:', '').replace('none', '') # to string, 'cuda:0' to '0'\n cpu = device == 'cpu'\n mps = device == 'mps' # Apple Metal Performance Shaders (MPS)\n if cpu or mps:\n os.environ['CUDA_VISIBLE_DEVICES'] = '-1' # force torch.cuda.is_available() = False\n elif device: # non-cpu device requested\n os.environ['CUDA_VISIBLE_DEVICES'] = device # set environment variable - must be before assert is_available()\n assert torch.cuda.is_available() and torch.cuda.device_count() >= len(device.replace(',', '')), \\\n f\"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)\"\n\n if not (cpu or mps) and torch.cuda.is_available(): # prefer GPU if available\n devices = device.split(',') if device else '0' # range(torch.cuda.device_count()) # i.e. 0,1,6,7\n n = len(devices) # device count\n if n > 1 and batch_size > 0: # check batch_size is divisible by device_count\n assert batch_size % n == 0, f'batch-size {batch_size} not multiple of GPU count {n}'\n space = ' ' * (len(s) + 1)\n for i, d in enumerate(devices):\n p = torch.cuda.get_device_properties(i)\n s += f\"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\\n\" # bytes to MB\n arg = 'cuda:0'\n elif mps and getattr(torch, 'has_mps', False) and torch.backends.mps.is_available(): # prefer MPS if available\n s += 'MPS\\n'\n arg = 'mps'\n else: # revert to CPU\n s += 'CPU\\n'\n arg = 'cpu'\n\n if not newline:\n s = s.rstrip()\n LOGGER.info(s.encode().decode('ascii', 'ignore') if platform.system() == 'Windows' else s) # emoji-safe\n return torch.device(arg)\n\n\ndef time_sync():\n # PyTorch-accurate time\n if torch.cuda.is_available():\n torch.cuda.synchronize()\n return time.time()\n\n\ndef profile(input, ops, n=10, device=None):\n # YOLOv5 speed/memory/FLOPs profiler\n #\n # Usage:\n # input = torch.randn(16, 3, 640, 640)\n # m1 = lambda x: x * torch.sigmoid(x)\n # m2 = nn.SiLU()\n # profile(input, [m1, m2], n=100) # profile over 100 iterations\n\n results = []\n if not isinstance(device, torch.device):\n device = select_device(device)\n print(\n f\"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}\"\n f\"{'input':>24s}{'output':>24s}\"\n )\n\n for x in input if isinstance(input, list) else [input]:\n x = x.to(device)\n x.requires_grad = True\n for m in ops if isinstance(ops, list) else [ops]:\n m = m.to(device) if hasattr(m, 'to') else m # device\n m = m.half() if hasattr(m, 'half') and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m\n tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward\n try:\n flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # GFLOPs\n except Exception:\n flops = 0\n\n try:\n for _ in range(n):\n t[0] = time_sync()\n y = m(x)\n t[1] = time_sync()\n try:\n _ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()\n t[2] = time_sync()\n except Exception: # no backward method\n # print(e) # for debug\n t[2] = float('nan')\n tf += (t[1] - t[0]) * 1000 / n # ms per op forward\n tb += (t[2] - t[1]) * 1000 / n # ms per op backward\n mem = torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0 # (GB)\n s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else 'list' for x in (x, y)) # shapes\n p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters\n print(f'{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}')\n results.append([p, flops, mem, tf, tb, s_in, s_out])\n except Exception as e:\n print(e)\n results.append(None)\n torch.cuda.empty_cache()\n return results\n\n\ndef is_parallel(model):\n # Returns True if model is of type DP or DDP\n return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)\n\n\ndef de_parallel(model):\n # De-parallelize a model: returns single-GPU model if model is of type DP or DDP\n return model.module if is_parallel(model) else model\n\n\ndef initialize_weights(model):\n for m in model.modules():\n t = type(m)\n if t is nn.Conv2d:\n pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')\n elif t is nn.BatchNorm2d:\n m.eps = 1e-3\n m.momentum = 0.03\n elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:\n m.inplace = True\n\n\ndef find_modules(model, mclass=nn.Conv2d):\n # Finds layer indices matching module class 'mclass'\n return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]\n\n\ndef sparsity(model):\n # Return global model sparsity\n a, b = 0, 0\n for p in model.parameters():\n a += p.numel()\n b += (p == 0).sum()\n return b / a\n\n\ndef prune(model, amount=0.3):\n # Prune model to requested global sparsity\n import torch.nn.utils.prune as prune\n print('Pruning model... ', end='')\n for name, m in model.named_modules():\n if isinstance(m, nn.Conv2d):\n prune.l1_unstructured(m, name='weight', amount=amount) # prune\n prune.remove(m, 'weight') # make permanent\n print(' %.3g global sparsity' % sparsity(model))\n\n\ndef fuse_conv_and_bn(conv, bn):\n # Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/\n fusedconv = nn.Conv2d(\n conv.in_channels,\n conv.out_channels,\n kernel_size=conv.kernel_size,\n stride=conv.stride,\n padding=conv.padding,\n groups=conv.groups,\n bias=True\n ).requires_grad_(False).to(conv.weight.device)\n\n # Prepare filters\n w_conv = conv.weight.clone().view(conv.out_channels, -1)\n w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))\n fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))\n\n # Prepare spatial bias\n b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias\n b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))\n fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)\n\n return fusedconv\n\n\ndef model_info(model, verbose=False, img_size=640):\n # Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]\n n_p = sum(x.numel() for x in model.parameters()) # number parameters\n n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients\n if verbose:\n print(f\"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}\")\n for i, (name, p) in enumerate(model.named_parameters()):\n name = name.replace('module_list.', '')\n print(\n '%5g %40s %9s %12g %20s %10.3g %10.3g' %\n (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std())\n )\n\n try: # FLOPs\n from thop import profile\n stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32\n img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input\n flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPs\n img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float\n fs = ', %.1f GFLOPs' % (flops * img_size[0] / stride * img_size[1] / stride) # 640x640 GFLOPs\n except Exception:\n fs = ''\n\n name = Path(model.yaml_file).stem.replace('yolov5', 'YOLOv5') if hasattr(model, 'yaml_file') else 'Model'\n LOGGER.info(f\"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}\")\n\n\ndef scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)\n # Scales img(bs,3,y,x) by ratio constrained to gs-multiple\n if ratio == 1.0:\n return img\n h, w = img.shape[2:]\n s = (int(h * ratio), int(w * ratio)) # new size\n img = F.interpolate(img, size=s, mode='bilinear', align_corners=False) # resize\n if not same_shape: # pad/crop img\n h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))\n return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean\n\n\ndef copy_attr(a, b, include=(), exclude=()):\n # Copy attributes from b to a, options to only include [...] and to exclude [...]\n for k, v in b.__dict__.items():\n if (len(include) and k not in include) or k.startswith('_') or k in exclude:\n continue\n else:\n setattr(a, k, v)\n\n\ndef smart_optimizer(model, name='Adam', lr=0.001, momentum=0.9, weight_decay=1e-5):\n # YOLOv5 3-param group optimizer: 0) weights with decay, 1) weights no decay, 2) biases no decay\n g = [], [], [] # optimizer parameter groups\n bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()\n for v in model.modules():\n if hasattr(v, 'bias') and isinstance(v.bias, nn.Parameter): # bias (no decay)\n g[2].append(v.bias)\n if isinstance(v, bn): # weight (no decay)\n g[1].append(v.weight)\n elif hasattr(v, 'weight') and isinstance(v.weight, nn.Parameter): # weight (with decay)\n g[0].append(v.weight)\n\n if name == 'Adam':\n optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum\n elif name == 'AdamW':\n optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)\n elif name == 'RMSProp':\n optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)\n elif name == 'SGD':\n optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)\n else:\n raise NotImplementedError(f'Optimizer {name} not implemented.')\n\n optimizer.add_param_group({'params': g[0], 'weight_decay': weight_decay}) # add g0 with weight_decay\n optimizer.add_param_group({'params': g[1], 'weight_decay': 0.0}) # add g1 (BatchNorm2d weights)\n LOGGER.info(\n f\"{colorstr('optimizer:')} {type(optimizer).__name__} with parameter groups \"\n f\"{len(g[1])} weight (no decay), {len(g[0])} weight, {len(g[2])} bias\"\n )\n return optimizer\n\n\nclass EarlyStopping:\n # YOLOv5 simple early stopper\n def __init__(self, patience=30):\n self.best_fitness = 0.0 # i.e. mAP\n self.best_epoch = 0\n self.patience = patience or float('inf') # epochs to wait after fitness stops improving to stop\n self.possible_stop = False # possible stop may occur next epoch\n\n def __call__(self, epoch, fitness):\n if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training\n self.best_epoch = epoch\n self.best_fitness = fitness\n delta = epoch - self.best_epoch # epochs without improvement\n self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch\n stop = delta >= self.patience # stop training if patience exceeded\n if stop:\n LOGGER.info(\n f'Stopping training early as no improvement observed in last {self.patience} epochs. '\n f'Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\\n'\n f'To update EarlyStopping(patience={self.patience}) pass a new patience value, '\n f'i.e. `python trainfd.py --patience 300` or use `--patience 0` to disable EarlyStopping.'\n )\n return stop\n\n\nclass ModelEMA:\n \"\"\" Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models\n Keeps a moving average of everything in the model state_dict (parameters and buffers)\n For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage\n \"\"\"\n\n def __init__(self, model, decay=0.9999, tau=2000, updates=0):\n # Create EMA\n self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA\n # if next(model.parameters()).device.type != 'cpu':\n # self.ema.half() # FP16 EMA\n self.updates = updates # number of EMA updates\n self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)\n for p in self.ema.parameters():\n p.requires_grad_(False)\n\n def update(self, model):\n # Update EMA parameters\n with torch.no_grad():\n self.updates += 1\n d = self.decay(self.updates)\n\n msd = de_parallel(model).state_dict() # model state_dict\n for k, v in self.ema.state_dict().items():\n if v.dtype.is_floating_point:\n v *= d\n v += (1 - d) * msd[k].detach()\n\n def update_attr(self, model, include=(), exclude=('process_group', 'reducer')):\n # Update EMA attributes\n copy_attr(self.ema, model, include, exclude)\n"
},
{
"path": "module/fuse/__init__.py",
"content": ""
},
{
"path": "module/fuse/discriminator.py",
"content": "from torch import nn, Tensor\n\n\nclass Discriminator(nn.Module):\n \"\"\"\n Use to discriminate fused images and source images.\n \"\"\"\n\n def __init__(self, dim: int = 32, size: tuple[int, int] = (224, 224)):\n super(Discriminator, self).__init__()\n\n self.conv = nn.Sequential(\n nn.Sequential(\n nn.Conv2d(1, dim, (3, 3), (2, 2), 1),\n nn.LeakyReLU(0.2, True),\n ),\n nn.Sequential(\n nn.Conv2d(dim, dim * 2, (3, 3), (2, 2), 1),\n nn.LeakyReLU(0.2, True),\n ),\n nn.Sequential(\n nn.Conv2d(dim * 2, dim * 4, (3, 3), (2, 2), 1),\n nn.LeakyReLU(0.2, True),\n ),\n )\n\n self.flatten = nn.Flatten()\n self.linear = nn.Linear((size[0] // 8) * (size[1] // 8) * 4 * dim, 1)\n\n def forward(self, x: Tensor) -> Tensor:\n x = self.conv(x)\n x = self.flatten(x)\n x = self.linear(x)\n return x\n"
},
{
"path": "module/fuse/generator.py",
"content": "import torch\nimport torch.nn as nn\nfrom torch import Tensor\n\n\nclass Generator(nn.Module):\n r\"\"\"\n Use to generate fused images.\n ir + vi -> fus\n \"\"\"\n\n def __init__(self, dim: int = 32, depth: int = 3):\n super(Generator, self).__init__()\n self.depth = depth\n\n self.encoder = nn.Sequential(\n nn.Conv2d(2, dim, (3, 3), (1, 1), 1),\n nn.BatchNorm2d(dim),\n nn.ReLU()\n )\n\n self.dense = nn.ModuleList([\n nn.Sequential(\n nn.Conv2d(dim * (i + 1), dim, (3, 3), (1, 1), 1),\n nn.BatchNorm2d(dim),\n nn.ReLU()\n ) for i in range(depth)\n ])\n\n self.fuse = nn.Sequential(\n nn.Sequential(\n nn.Conv2d(dim * (depth + 1), dim * 4, (3, 3), (1, 1), 1),\n nn.ReLU()\n ),\n nn.Sequential(\n nn.Conv2d(dim * 4, dim * 2, (3, 3), (1, 1), 1),\n nn.BatchNorm2d(dim * 2),\n nn.ReLU()\n ),\n nn.Sequential(\n nn.Conv2d(dim * 2, dim, (3, 3), (1, 1), 1),\n nn.BatchNorm2d(dim),\n nn.ReLU()\n ),\n nn.Sequential(\n nn.Conv2d(dim, 1, (3, 3), (1, 1), 1),\n nn.Tanh()\n ),\n )\n\n def forward(self, ir: Tensor, vi: Tensor) -> Tensor:\n src = torch.cat([ir, vi], dim=1)\n x = self.encoder(src)\n for i in range(self.depth):\n t = self.dense[i](x)\n x = torch.cat([x, t], dim=1)\n fus = self.fuse(x)\n return fus\n"
},
{
"path": "module/saliency/__init__.py",
"content": ""
},
{
"path": "module/saliency/u2net.py",
"content": "import torch\nimport torch.nn as nn\nimport torch.nn.functional as F\n\n\n# U^2-Net: Going Deeper with Nested U-Structure for Salient Object Detection.\n# Author: Xuebin Qin, Zichen Zhang, Chenyang Huang et al.\n# Code Reference: https://github.com/xuebinqin/U-2-Net/blob/master/model/u2net.py\n\nclass REBNCONV(nn.Module):\n def __init__(self, in_ch=3, out_ch=3, dirate=1):\n super(REBNCONV, self).__init__()\n\n self.conv_s1 = nn.Conv2d(in_ch, out_ch, 3, padding=1 * dirate, dilation=1 * dirate)\n self.bn_s1 = nn.BatchNorm2d(out_ch)\n self.relu_s1 = nn.ReLU(inplace=True)\n\n def forward(self, x):\n hx = x\n xout = self.relu_s1(self.bn_s1(self.conv_s1(hx)))\n\n return xout\n\n\n## upsample tensor 'src' to have the same spatial size with tensor 'tar'\ndef _upsample_like(src, tar):\n src = nn.functional.interpolate(src, size=tar.shape[2:], mode='bilinear')\n return src\n\n\n### RSU-7 ###\nclass RSU7(nn.Module): # UNet07DRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU7, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool5 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv6 = REBNCONV(mid_ch, mid_ch, dirate=1)\n\n self.rebnconv7 = REBNCONV(mid_ch, mid_ch, dirate=2)\n\n self.rebnconv6d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv5d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx = self.pool1(hx1)\n\n hx2 = self.rebnconv2(hx)\n hx = self.pool2(hx2)\n\n hx3 = self.rebnconv3(hx)\n hx = self.pool3(hx3)\n\n hx4 = self.rebnconv4(hx)\n hx = self.pool4(hx4)\n\n hx5 = self.rebnconv5(hx)\n hx = self.pool5(hx5)\n\n hx6 = self.rebnconv6(hx)\n\n hx7 = self.rebnconv7(hx6)\n\n hx6d = self.rebnconv6d(torch.cat((hx7, hx6), 1))\n hx6dup = _upsample_like(hx6d, hx5)\n\n hx5d = self.rebnconv5d(torch.cat((hx6dup, hx5), 1))\n hx5dup = _upsample_like(hx5d, hx4)\n\n hx4d = self.rebnconv4d(torch.cat((hx5dup, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))\n\n return hx1d + hxin\n\n\n### RSU-6 ###\nclass RSU6(nn.Module): # UNet06DRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU6, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=1)\n\n self.rebnconv6 = REBNCONV(mid_ch, mid_ch, dirate=2)\n\n self.rebnconv5d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx = self.pool1(hx1)\n\n hx2 = self.rebnconv2(hx)\n hx = self.pool2(hx2)\n\n hx3 = self.rebnconv3(hx)\n hx = self.pool3(hx3)\n\n hx4 = self.rebnconv4(hx)\n hx = self.pool4(hx4)\n\n hx5 = self.rebnconv5(hx)\n\n hx6 = self.rebnconv6(hx5)\n\n hx5d = self.rebnconv5d(torch.cat((hx6, hx5), 1))\n hx5dup = _upsample_like(hx5d, hx4)\n\n hx4d = self.rebnconv4d(torch.cat((hx5dup, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))\n\n return hx1d + hxin\n\n\n### RSU-5 ###\nclass RSU5(nn.Module): # UNet05DRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU5, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)\n\n self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=2)\n\n self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx = self.pool1(hx1)\n\n hx2 = self.rebnconv2(hx)\n hx = self.pool2(hx2)\n\n hx3 = self.rebnconv3(hx)\n hx = self.pool3(hx3)\n\n hx4 = self.rebnconv4(hx)\n\n hx5 = self.rebnconv5(hx4)\n\n hx4d = self.rebnconv4d(torch.cat((hx5, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))\n\n return hx1d + hxin\n\n\n### RSU-4 ###\nclass RSU4(nn.Module): # UNet04DRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU4, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)\n self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=2)\n\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx = self.pool1(hx1)\n\n hx2 = self.rebnconv2(hx)\n hx = self.pool2(hx2)\n\n hx3 = self.rebnconv3(hx)\n\n hx4 = self.rebnconv4(hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))\n\n return hx1d + hxin\n\n\n### RSU-4F ###\nclass RSU4F(nn.Module): # UNet04FRES(nn.Module):\n\n def __init__(self, in_ch=3, mid_ch=12, out_ch=3):\n super(RSU4F, self).__init__()\n\n self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)\n\n self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)\n self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=2)\n self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=4)\n\n self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=8)\n\n self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=4)\n self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=2)\n self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)\n\n def forward(self, x):\n hx = x\n\n hxin = self.rebnconvin(hx)\n\n hx1 = self.rebnconv1(hxin)\n hx2 = self.rebnconv2(hx1)\n hx3 = self.rebnconv3(hx2)\n\n hx4 = self.rebnconv4(hx3)\n\n hx3d = self.rebnconv3d(torch.cat((hx4, hx3), 1))\n hx2d = self.rebnconv2d(torch.cat((hx3d, hx2), 1))\n hx1d = self.rebnconv1d(torch.cat((hx2d, hx1), 1))\n\n return hx1d + hxin\n\n\n##### U^2-Net ####\nclass U2NET(nn.Module):\n\n def __init__(self, in_ch=3, out_ch=1):\n super(U2NET, self).__init__()\n\n self.stage1 = RSU7(in_ch, 32, 64)\n self.pool12 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage2 = RSU6(64, 32, 128)\n self.pool23 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage3 = RSU5(128, 64, 256)\n self.pool34 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage4 = RSU4(256, 128, 512)\n self.pool45 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage5 = RSU4F(512, 256, 512)\n self.pool56 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage6 = RSU4F(512, 256, 512)\n\n # decoder\n self.stage5d = RSU4F(1024, 256, 512)\n self.stage4d = RSU4(1024, 128, 256)\n self.stage3d = RSU5(512, 64, 128)\n self.stage2d = RSU6(256, 32, 64)\n self.stage1d = RSU7(128, 16, 64)\n\n self.side1 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side2 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side3 = nn.Conv2d(128, out_ch, 3, padding=1)\n self.side4 = nn.Conv2d(256, out_ch, 3, padding=1)\n self.side5 = nn.Conv2d(512, out_ch, 3, padding=1)\n self.side6 = nn.Conv2d(512, out_ch, 3, padding=1)\n\n self.outconv = nn.Conv2d(6 * out_ch, out_ch, 1)\n\n def forward(self, x):\n hx = x\n\n # stage 1\n hx1 = self.stage1(hx)\n hx = self.pool12(hx1)\n\n # stage 2\n hx2 = self.stage2(hx)\n hx = self.pool23(hx2)\n\n # stage 3\n hx3 = self.stage3(hx)\n hx = self.pool34(hx3)\n\n # stage 4\n hx4 = self.stage4(hx)\n hx = self.pool45(hx4)\n\n # stage 5\n hx5 = self.stage5(hx)\n hx = self.pool56(hx5)\n\n # stage 6\n hx6 = self.stage6(hx)\n hx6up = _upsample_like(hx6, hx5)\n\n # -------------------- decoder --------------------\n hx5d = self.stage5d(torch.cat((hx6up, hx5), 1))\n hx5dup = _upsample_like(hx5d, hx4)\n\n hx4d = self.stage4d(torch.cat((hx5dup, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.stage3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.stage2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.stage1d(torch.cat((hx2dup, hx1), 1))\n\n # side output\n d1 = self.side1(hx1d)\n\n d2 = self.side2(hx2d)\n d2 = _upsample_like(d2, d1)\n\n d3 = self.side3(hx3d)\n d3 = _upsample_like(d3, d1)\n\n d4 = self.side4(hx4d)\n d4 = _upsample_like(d4, d1)\n\n d5 = self.side5(hx5d)\n d5 = _upsample_like(d5, d1)\n\n d6 = self.side6(hx6)\n d6 = _upsample_like(d6, d1)\n\n d0 = self.outconv(torch.cat((d1, d2, d3, d4, d5, d6), 1))\n\n return [torch.sigmoid(x) for x in [d0, d1, d2, d3, d4, d5, d6]]\n\n\n### U^2-Net small ###\nclass U2NETP(nn.Module):\n\n def __init__(self, in_ch=3, out_ch=1):\n super(U2NETP, self).__init__()\n\n self.stage1 = RSU7(in_ch, 16, 64)\n self.pool12 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage2 = RSU6(64, 16, 64)\n self.pool23 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage3 = RSU5(64, 16, 64)\n self.pool34 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage4 = RSU4(64, 16, 64)\n self.pool45 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage5 = RSU4F(64, 16, 64)\n self.pool56 = nn.MaxPool2d(2, stride=2, ceil_mode=True)\n\n self.stage6 = RSU4F(64, 16, 64)\n\n # decoder\n self.stage5d = RSU4F(128, 16, 64)\n self.stage4d = RSU4(128, 16, 64)\n self.stage3d = RSU5(128, 16, 64)\n self.stage2d = RSU6(128, 16, 64)\n self.stage1d = RSU7(128, 16, 64)\n\n self.side1 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side2 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side3 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side4 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side5 = nn.Conv2d(64, out_ch, 3, padding=1)\n self.side6 = nn.Conv2d(64, out_ch, 3, padding=1)\n\n self.outconv = nn.Conv2d(6 * out_ch, out_ch, 1)\n\n def forward(self, x):\n hx = x\n\n # stage 1\n hx1 = self.stage1(hx)\n hx = self.pool12(hx1)\n\n # stage 2\n hx2 = self.stage2(hx)\n hx = self.pool23(hx2)\n\n # stage 3\n hx3 = self.stage3(hx)\n hx = self.pool34(hx3)\n\n # stage 4\n hx4 = self.stage4(hx)\n hx = self.pool45(hx4)\n\n # stage 5\n hx5 = self.stage5(hx)\n hx = self.pool56(hx5)\n\n # stage 6\n hx6 = self.stage6(hx)\n hx6up = _upsample_like(hx6, hx5)\n\n # decoder\n hx5d = self.stage5d(torch.cat((hx6up, hx5), 1))\n hx5dup = _upsample_like(hx5d, hx4)\n\n hx4d = self.stage4d(torch.cat((hx5dup, hx4), 1))\n hx4dup = _upsample_like(hx4d, hx3)\n\n hx3d = self.stage3d(torch.cat((hx4dup, hx3), 1))\n hx3dup = _upsample_like(hx3d, hx2)\n\n hx2d = self.stage2d(torch.cat((hx3dup, hx2), 1))\n hx2dup = _upsample_like(hx2d, hx1)\n\n hx1d = self.stage1d(torch.cat((hx2dup, hx1), 1))\n\n # side output\n d1 = self.side1(hx1d)\n\n d2 = self.side2(hx2d)\n d2 = _upsample_like(d2, d1)\n\n d3 = self.side3(hx3d)\n d3 = _upsample_like(d3, d1)\n\n d4 = self.side4(hx4d)\n d4 = _upsample_like(d4, d1)\n\n d5 = self.side5(hx5d)\n d5 = _upsample_like(d5, d1)\n\n d6 = self.side6(hx6)\n d6 = _upsample_like(d6, d1)\n\n d0 = self.outconv(torch.cat((d1, d2, d3, d4, d5, d6), 1))\n\n return [torch.sigmoid(x) for x in [d0, d1, d2, d3, d4, d5, d6]]\n"
},
{
"path": "pipeline/__init__.py",
"content": ""
},
{
"path": "pipeline/detect.py",
"content": "import logging\nimport sys\nfrom pathlib import Path\nfrom typing import Literal, List, Tuple\n\nimport numpy\nimport torch\nimport torch.backends.cudnn\nfrom numpy import number\nfrom torch import Tensor, nn\nfrom torchvision.ops import box_convert\nfrom torchvision.utils import draw_bounding_boxes\n\nfrom functions.get_param_groups import get_param_groups\nfrom module.detect.models.common import Conv\nfrom module.detect.models.yolo import Model\nfrom module.detect.utils.general import labels_to_class_weights, non_max_suppression\nfrom module.detect.utils.loss import ComputeLoss\nfrom module.detect.utils.metrics import box_iou\n\n\nclass Detect:\n r\"\"\"\n Init detect pipeline to detect objects from fused images.\n \"\"\"\n\n def __init__(self, config, mode: Literal['train', 'inference'], nc: int, classes: List[str], labels: List[Tensor]):\n # attach hyper parameters\n self.config = config\n self.mode = mode # fuse computation mode: train(grad+graph), eval(graph), inference(x)\n\n # init device\n device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')\n logging.info(f'deploy {config.detect.model} on device {str(device)}')\n self.device = device\n\n # init yolo model\n model_t = config.detect.model\n config_p = Path(__file__).parents[1] / 'module' / 'detect' / 'models' / f'{model_t}.yaml'\n net = Model(cfg=config_p, ch=config.detect.channels, nc=nc).to(self.device)\n logging.info(f'init {model_t} with (nc: {nc})')\n self.net = net\n\n # init hyperparameters\n hyp = config.loss.detect\n nl = net.model[-1].nl # number of detection layers\n\n # model parameters\n hyp['box'] *= 3 / nl # scale to layers\n hyp['cls'] *= nc / 80 * 3 / nl # scale to classes and layers\n hyp['obj'] *= (config.train.image_size[0] / 640) ** 2 * 3 / nl # scale to image size and layers\n hyp['label_smoothing'] = False # label smoothing\n\n # attach constants\n net.nc = nc # attach number of classes to model\n net.hyp = hyp # attach hyper parameters to model\n net.class_weights = labels_to_class_weights(labels, nc).to(self.device) # attach class weights\n net.names = classes\n\n # load pretrained parameters (optional)\n d_ckpt = config.detect.pretrained\n if d_ckpt is not None:\n if 'http' in d_ckpt:\n ckpt_p = Path.cwd() / 'weights' / 'v1' / 'tardal.pth'\n url = d_ckpt\n logging.info(f'download pretrained parameters from {url}')\n try:\n ckpt = torch.hub.load_state_dict_from_url(url, model_dir=ckpt_p.parent, map_location='cpu')\n except Exception as err:\n logging.fatal(f'connect to {url} failed: {err}, try download pretrained weights manually')\n sys.exit(1)\n else:\n ckpt = torch.load(d_ckpt, map_location='cpu')\n self.load_ckpt(ckpt)\n\n # criterion (reference: YOLOv5 official)\n self.loss = ComputeLoss(net)\n\n def load_ckpt(self, ckpt: dict):\n ckpt = ckpt if 'detect' not in ckpt else ckpt['detect']\n self.net.load_state_dict(ckpt)\n\n def load_ckpt_fuse(self, ckpt: dict):\n ckpt = ckpt if 'detect' not in ckpt else ckpt['detect']\n # fuse conv & bn\n self.net.fuse()\n # compatibility updates\n for m in self.net.modules():\n t = type(m)\n if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Model):\n m.inplace = True # torch 1.7.0 compatibility\n if t is Detect and not isinstance(m.anchor_grid, list):\n delattr(m, 'anchor_grid')\n setattr(m, 'anchor_grid', [torch.zeros(1)] * m.nl)\n elif t is Conv:\n m._non_persistent_buffers_set = set() # torch 1.6.0 compatibility\n elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):\n m.recompute_scale_factor = None # torch 1.11.0 compatibility\n # return as expect\n self.net.load_state_dict(ckpt)\n\n def save_ckpt(self) -> dict:\n ckpt = {'detect': self.net.state_dict()}\n return ckpt\n\n def forward(self, imgs: Tensor) -> Tensor:\n self.net.train()\n pred = self.net(imgs)\n return pred\n\n @torch.no_grad()\n def eval(self, imgs: Tensor, targets: Tensor, stats: List, preview: bool = False) -> Tuple[int, Tensor | None]:\n self.net.eval()\n\n # forward\n preds, _ = self.net(imgs) # (xyxy, conf, cls) [h, w]\n\n # convert pred format\n batch_size, _, height, width = imgs.shape\n targets[:, 2:] *= torch.tensor((width, height, width, height), device=self.device) # (id, cls, xyxy) [1, 1] -> [h, w]\n preds = non_max_suppression(preds, conf_thres=0.001, iou_thres=0.6, labels=[], multi_label=True) # (xyxy, conf, cls) [h, w]\n\n # const\n iou_v = torch.linspace(0.5, 0.95, 10).to(self.device) # iou vector for mAP@0.5:0.95\n n_iou = iou_v.numel()\n\n # record\n seen = 0\n\n # statistics per images\n for si, pred in enumerate(preds):\n labels = targets[targets[:, 0] == si, 1:] # (cls, xyxy) [h, w]\n\n num_l, num_p = labels.shape[0], pred.shape[0]\n correct = torch.zeros(num_p, n_iou, dtype=torch.bool, device=self.device)\n seen += 1\n\n # no pred result\n if num_p == 0:\n if num_l:\n stats.append((correct, *torch.zeros((2, 0), device=self.device), labels[:, 0]))\n continue\n\n # predictions\n pred_n = pred.clone()\n\n # evaluate\n if num_l:\n t_box = labels[:, 1:5] # (xyxy) [h, w]\n labels_n = torch.cat((labels[:, 0:1], t_box), 1) # (xyxy, cls) [h, w]\n correct = self.process_batch(pred_n, labels_n, iou_v)\n\n # update stats matrix\n stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)\n\n # preview\n if preview:\n prv = self.preview(imgs, preds)\n return seen, prv\n\n # return as expected\n return seen, None\n\n @torch.inference_mode()\n def inference(self, imgs: Tensor) -> Tensor:\n self.net.eval()\n # forward\n preds, _ = self.net(imgs)\n # convert pred format\n batch_size, _, height, width = imgs.shape\n preds = non_max_suppression(preds, conf_thres=0.001, iou_thres=0.6, multi_label=True) # [xyxy, conf, cls]\n # return as expected\n return preds\n\n def criterion(self, imgs: Tensor, targets: Tensor) -> Tuple[Tensor, List[number]]:\n \"\"\"\n criterion on detector\n \"\"\"\n\n logging.debug('criterion on yolo')\n\n # forward\n pred = self.forward(imgs) # (bs, 3, 80, 80, class + 5)\n\n # calculate loss\n targets[:, 2:] = box_convert(targets[:, 2:], 'xyxy', 'cxcywh') # (idx, cls, x1, y1, x2, y2) -> (idx, cls, cx, cy, w, h)\n loss, loss_items = self.loss(pred, targets.to(self.device))\n\n return loss, [x.item() for x in loss_items]\n\n @staticmethod\n def preview(imgs: Tensor, preds: Tensor, conf_th: float = 0.6):\n imgs_mk = []\n # preds: (xyxy, conf, cls)\n\n # mark on images\n for img, pred in zip(imgs, preds):\n pred = list(filter(lambda x: x[4] > conf_th, pred))\n logging.debug(f'detect {len(pred)} on images')\n img = (img * 255).type(torch.uint8)\n boxes = [x[:4] for x in pred]\n cls = [int(x[5].cpu().numpy()) for x in pred]\n labels = [f'{[cls]}: {x[4].cpu().numpy():.2f}' for cls, x in zip(cls, pred)]\n if len(boxes):\n img = draw_bounding_boxes(img, torch.stack(boxes, dim=0), labels=labels, width=2)\n imgs_mk.append((img / 255).float().to(imgs.device))\n\n # fill or crop to 9 images\n if len(imgs_mk) > 9:\n imgs_mk = imgs_mk[:9]\n elif len(imgs_mk) < 9:\n zeros = [torch.zeros_like(imgs_mk[0], device=imgs[0].device) for _ in range(9 - len(imgs_mk))]\n imgs_mk = imgs_mk + zeros\n\n # merge images(9, 3, h, w) to one image (3, 3h, 3w)\n imgs_mk = torch.stack(imgs_mk, dim=0)\n imgs_c = []\n for i in range(3):\n t = [imgs_mk[i * 3 + j] for j in range(3)] # [(3, h, w), (3, h, w), (3, h, w)]\n imgs_c.append(torch.cat(t, dim=2)) # (3, h, 3w)\n imgs_one = torch.cat(imgs_c, dim=1) # (3, 3h, 3w)\n\n # return as expected\n return imgs_one\n\n def param_groups(self) -> tuple[List, List, List]:\n group = [], [], []\n tmp = get_param_groups(self.net)\n for idx in range(3):\n group[idx].extend(tmp[idx])\n return group\n\n @staticmethod\n def process_batch(detections, labels, iou_v):\n \"\"\"\n Return correct predictions' matrix. Both sets of boxes are in (x1, y1, x2, y2) format.\n Arguments:\n detections (Array[N, 6]), x1, y1, x2, y2, conf, class\n labels (Array[M, 5]), class, x1, y1, x2, y2\n iou_v (Array[10]), iou thresholds\n Returns:\n correct (Array[N, 10]), for 10 IoU levels\n \"\"\"\n correct = torch.zeros(detections.shape[0], iou_v.shape[0], dtype=torch.bool, device=iou_v.device)\n iou = box_iou(labels[:, 1:], detections[:, :4])\n x = torch.where((iou >= iou_v[0]) & (labels[:, 0:1] == detections[:, 5])) # IoU above threshold and classes match\n if x[0].shape[0]:\n matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detection, iou]\n if x[0].shape[0] > 1:\n matches = matches[matches[:, 2].argsort()[::-1]]\n matches = matches[numpy.unique(matches[:, 1], return_index=True)[1]]\n # matches = matches[matches[:, 2].argsort()[::-1]]\n matches = matches[numpy.unique(matches[:, 0], return_index=True)[1]]\n matches = torch.Tensor(matches).to(iou_v.device)\n correct[matches[:, 1].long()] = matches[:, 2:3] >= iou_v\n return correct\n"
},
{
"path": "pipeline/fuse.py",
"content": "import logging\nimport sys\nfrom pathlib import Path\nfrom typing import Literal, List, Tuple, Optional\n\nimport torch\nimport torch.backends.cudnn\nfrom kornia.filters import spatial_gradient\nfrom kornia.losses import MS_SSIMLoss, ssim_loss\nfrom numpy import number\nfrom torch import Tensor\nfrom torch.nn.functional import l1_loss\n\nfrom functions.div_loss import div_loss\nfrom functions.get_param_groups import get_param_groups\nfrom module.fuse.discriminator import Discriminator\nfrom module.fuse.generator import Generator\n\n\nclass Fuse:\n r\"\"\"\n Init fuse pipeline to generate fused images from infrared and visible images.\n \"\"\"\n\n def __init__(self, config, mode: Literal['train', 'inference']):\n # attach hyper parameters\n self.config = config\n self.mode = mode # fuse computation mode: train(grad+graph), eval(graph), inference(x)\n modules = []\n\n # init device\n device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')\n logging.info(f'deploy tardal-fuse on device {str(device)}')\n self.device = device\n\n # init tardal generator\n f_dim, f_depth = config.fuse.dim, config.fuse.depth\n generator = Generator(dim=f_dim, depth=f_depth)\n modules.append(generator)\n logging.info(f'init generator with (dim: {f_dim} depth: {f_depth})')\n self.generator = generator\n\n # init tardel discriminator during train mode\n if mode == 'train':\n f_size = config.train.image_size\n dis_t = Discriminator(dim=f_dim, size=f_size)\n dis_d = Discriminator(dim=f_dim, size=f_size)\n modules += [dis_t, dis_d]\n logging.info(f'init discriminators with (dim: {f_dim} size: {f_size})')\n self.dis_t, self.dis_d = dis_t, dis_d\n\n # load pretrained parameters (optional)\n f_ckpt = config.fuse.pretrained\n if f_ckpt is not None:\n if 'http' in f_ckpt:\n ckpt_p = Path.cwd() / 'weights' / 'v1' / 'tardal.pth'\n url = f_ckpt\n logging.info(f'download pretrained parameters from {url}')\n try:\n ckpt = torch.hub.load_state_dict_from_url(url, model_dir=ckpt_p.parent, map_location='cpu')\n except Exception as err:\n logging.fatal(f'connect to {url} failed: {err}, try download pretrained weights manually')\n sys.exit(1)\n else:\n ckpt = torch.load(f_ckpt, map_location='cpu')\n self.load_ckpt(ckpt)\n\n # criterion\n if config.loss.fuse.src_fn == 'v1':\n ms_ssim_loss = MS_SSIMLoss()\n modules.append(ms_ssim_loss)\n self.ms_ssim_loss = ms_ssim_loss\n\n # move to device\n _ = [x.to(device) for x in modules]\n\n # more parameters\n # WGAN div hyper parameters\n self.wk, self.wp = 2, 6\n\n def load_ckpt(self, ckpt: dict):\n f_ckpt = ckpt if 'fuse' not in ckpt else ckpt['fuse']\n\n # check eval mode\n if self.config.inference.use_eval is None:\n if 'use_eval' in f_ckpt:\n logging.warning(f'overwriting inference.use_eval {self.config.inference.use_eval} with {f_ckpt[\"use_eval\"]}')\n self.config.inference.use_eval = f_ckpt['use_eval']\n else:\n logging.warning(f'no use_eval settings found, using default (true)')\n self.config.inference.use_eval = True\n if 'use_eval' in f_ckpt:\n f_ckpt.pop('use_eval')\n\n # load state dict\n self.generator.load_state_dict(f_ckpt)\n if self.mode == 'train' and 'disc' in ckpt:\n self.dis_t.load_state_dict(ckpt['disc']['t'])\n self.dis_d.load_state_dict(ckpt['disc']['d'])\n\n def save_ckpt(self) -> dict:\n ckpt = {'fuse': self.generator.state_dict()}\n if self.mode == 'train':\n ckpt |= {'disc': {'t': self.dis_t.state_dict(), 'd': self.dis_t.state_dict()}}\n return ckpt\n\n def forward(self, ir: Tensor, vi: Tensor) -> Tensor:\n self.generator.train()\n fus = self.generator(ir, vi)\n return fus\n\n @torch.no_grad()\n def eval(self, ir: Tensor, vi: Tensor) -> Tensor:\n self.generator.eval()\n fus = self.generator(ir, vi)\n return fus\n\n @torch.inference_mode()\n def inference(self, ir: Tensor, vi: Tensor) -> Tensor:\n if self.config.inference.use_eval:\n self.generator.eval()\n fus = self.generator(ir, vi)\n return fus\n\n def criterion_dis_t(self, ir: Tensor, vi: Tensor, mk: Tensor) -> Tensor:\n \"\"\"\n criterion on target discriminator 'ir * m <- pixel distribution -> fus * m'\n \"\"\"\n\n logging.debug('criterion on target discriminator')\n\n # switch to train mode\n self.dis_t.train()\n\n # sample real & fake\n real_s = ir * mk\n fake_s = self.eval(ir, vi) * mk\n fake_s.detach_()\n\n # judge value towards real & fake\n real_v = torch.squeeze(self.dis_t(real_s))\n fake_v = torch.squeeze(self.dis_t(fake_s))\n\n # loss calculate\n real_l, fake_l = -real_v.mean(), fake_v.mean()\n div = div_loss(self.dis_t, real_s, fake_s, self.wp)\n loss = real_l + fake_l + self.wk * div\n\n return loss\n\n def criterion_dis_d(self, ir: Tensor, vi: Tensor, mk: Tensor) -> Tensor:\n \"\"\"\n criterion on detail discriminator 'vi * m <- grad distribution -> fus * (1-m)'\n mask: optional\n \"\"\"\n\n logging.debug('criterion on detail discriminator')\n\n # switch to train mode\n self.dis_d.train()\n\n # sample real & fake\n mk = mk if self.config.loss.fuse.d_mask else 0 # use mask or not\n real_s = self.gradient(vi) * (1 - mk)\n fake_s = self.gradient(self.eval(ir, vi)) * (1 - mk)\n fake_s.detach_()\n\n # judge value towards real & fake\n real_v = torch.squeeze(self.dis_d(real_s))\n fake_v = torch.squeeze(self.dis_d(fake_s))\n\n # loss calculate\n real_l, fake_l = -real_v.mean(), fake_v.mean()\n div = div_loss(self.dis_d, real_s, fake_s, self.wp)\n loss = real_l + fake_l + self.wk * div\n\n return loss\n\n def criterion_generator(self, ir: Tensor, vi: Tensor, mk: Tensor, w1: Tensor, w2: Tensor, d_warming: bool = True):\n \"\"\"\n criterion on generator 'ir, vi <- loss -> fus'\n return: Tuple[Tensor, List[number]] (only fuse), Tuple[Tensor, Tensor, List[number]] (joint mode)\n \"\"\"\n\n logging.debug('criterion on generator')\n\n # forward (train mode for calculate loss)\n fus = self.forward(ir, vi)\n\n # calculate src and adv loss\n f_loss = self.config.loss.fuse\n src_w, adv_w = f_loss.src, f_loss.adv\n adv_w = 0 if d_warming else adv_w\n src_l = w1 * self.src_loss(fus, ir) + w2 * self.src_loss(fus, vi)\n adv_l, tar_l, det_l = self.adv_loss(fus, mk)\n loss = src_w * src_l.mean() + adv_w * adv_l.mean()\n\n # only fuse\n return loss, [src_l.mean().item(), adv_l.mean().item(), tar_l, det_l]\n\n @staticmethod\n def gradient(x: Tensor, eps: float = 1e-8) -> Tensor:\n s = spatial_gradient(x, 'sobel')\n dx, dy = s[:, :, 0, :, :], s[:, :, 1, :, :]\n u = torch.sqrt(torch.pow(dx, 2) + torch.pow(dy, 2) + eps) # sqrt backwork x range: (0, n]\n return u\n\n def src_loss(self, x: Tensor, y: Tensor) -> Tensor:\n src_fn = self.config.loss.fuse.src_fn\n match src_fn:\n case 'v0':\n \"fus <- 0.01*ssim + 0.99*l1 -> src\"\n return 0.01 * ssim_loss(x, y, window_size=11) + 0.99 * l1_loss(x, y)\n case 'v1':\n \"fus <- ms-ssim -> src\"\n return self.ms_ssim_loss(x, y)\n case _:\n assert NotImplemented, f'unsupported src function: {src_fn}'\n\n def adv_loss(self, fus: Tensor, mk: Tensor) -> Tuple[Tensor, number, number]:\n # weights\n f_loss = self.config.loss.fuse\n tar_w, det_w = f_loss.t_adv, f_loss.d_adv\n # target loss\n self.dis_t.eval()\n tar_l = -self.dis_t(fus * mk) # fus * m -> target pixel distribution (max -> -min)\n # detail loss\n self.dis_d.eval()\n mk = mk if self.config.loss.fuse.d_mask else 0 # use mask or not\n det_l = -self.dis_d(self.gradient(fus) * (1 - mk)) # grad(fus) * (1-m) -> grad distribution (max -> -min)\n return tar_w * tar_l + det_w * det_l, tar_l.mean().item(), det_l.mean().item()\n\n def param_groups(self, key: Optional[Literal['g', 'd']] = None) -> tuple[List, List, List]:\n match key:\n case 'g':\n return self.g_params()\n case 'd':\n return self.d_params()\n case _:\n g_params, d_params = self.g_params(), self.d_params()\n group = [], [], []\n for idx in range(3):\n group[idx].extend(g_params[idx])\n group[idx].extend(d_params[idx])\n return group\n\n def g_params(self) -> tuple[List, List, List]:\n return get_param_groups(self.generator)\n\n def d_params(self) -> tuple[List, List, List]:\n group = [], [], []\n for module in [self.dis_t, self.dis_d]:\n tmp = get_param_groups(module)\n for idx in range(3):\n group[idx].extend(tmp[idx])\n return group\n"
},
{
"path": "pipeline/iqa.py",
"content": "import logging\nimport socket\nimport sys\nfrom pathlib import Path\nfrom typing import Literal\n\nimport cv2\nimport torch.cuda\nfrom kornia import image_to_tensor, tensor_to_image\nfrom torch import Tensor\nfrom torchvision.models import vgg16\nfrom torchvision.transforms import Compose, Resize, Normalize\nfrom tqdm import tqdm\n\n\nclass IQA:\n r\"\"\"\n Init information measurement pipeline to generate iqa from source images.\n \"\"\"\n\n def __init__(self, url: str):\n # init device\n device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')\n logging.info(f'deploy iqa on device {str(device)}')\n self.device = device\n\n # init vgg backbone\n extractor = vgg16().features\n logging.info(f'init iqa extractor with (3 -> 1)')\n self.extractor = extractor\n\n # download pretrained parameters\n ckpt_p = Path.cwd() / 'weights' / 'v1' / 'iqa.pth'\n logging.info(f'download pretrained iqa weights from {url}')\n socket.setdefaulttimeout(5)\n try:\n logging.info(f'starting download of pretrained weights from {url}')\n ckpt = torch.hub.load_state_dict_from_url(url, model_dir=ckpt_p.parent, map_location='cpu')\n except Exception as err:\n logging.fatal(f'load {url} failed: {err}, try download pretrained weights manually')\n sys.exit(1)\n extractor.load_state_dict(ckpt)\n logging.info(f'load pretrained iqa weights from {str(ckpt_p)}')\n\n # move to device\n extractor.to(device)\n\n # more parameters\n self.transform_fn = Compose([Resize((672, 672)), Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])\n self.upsample = Resize((672, 672))\n\n @torch.inference_mode()\n def inference(self, src: str | Path, dst: str | Path):\n self.modality_inference(src, dst, 'ir')\n self.modality_inference(src, dst, 'vi')\n\n @torch.inference_mode()\n def modality_inference(self, src: str | Path, dst: str | Path, modality: Literal['ir', 'vi']):\n # create save folder\n dst = Path(dst / modality)\n dst.mkdir(parents=True, exist_ok=True)\n logging.debug(f'create save folder {str(dst)}')\n\n # forward\n self.extractor.eval()\n img_list = sorted(Path(src / modality).rglob('*.png'))\n logging.info(f'load {len(img_list)} images from {str(src)}')\n process = tqdm(img_list)\n for img_p in process:\n process.set_description(f'generate iqa for {img_p.name} to {str(dst)}')\n img = self._imread(img_p).to(self.device)\n reverse_fn = Resize(size=img.shape[-2:])\n iqa = self.extractor_inference(img.unsqueeze(0))[0]\n iqa = reverse_fn(iqa).squeeze()\n cv2.imwrite(str(dst / img_p.name), tensor_to_image(iqa) * 255)\n\n @torch.inference_mode()\n def extractor_inference(self, x: Tensor) -> Tensor:\n # information measurement\n l_ids = [3, 8, 15, 22, 29] # layers before max-pooling\n f = []\n x = x.repeat(1, 3, 1, 1) if x.size(dim=1) == 1 else x\n x = self.transform_fn(x)\n for index, layer in enumerate(self.extractor):\n x = layer(x)\n if index in l_ids:\n t = x.mean(axis=1, keepdims=True)\n f.append(self.upsample(t))\n f = torch.cat(f, dim=1).mean(axis=1, keepdims=True)\n return f\n\n @staticmethod\n def _imread(img_p: str | Path):\n img = cv2.imread(str(img_p), cv2.IMREAD_GRAYSCALE)\n img = image_to_tensor(img).float() / 255\n return img\n"
},
{
"path": "pipeline/saliency.py",
"content": "import logging\nimport socket\nimport sys\nimport warnings\nfrom pathlib import Path\n\nimport cv2\nimport torch.hub\nfrom kornia import image_to_tensor, tensor_to_image\nfrom torchvision.transforms import Resize, Compose, Normalize\nfrom tqdm import tqdm\n\nfrom module.saliency.u2net import U2NETP\n\n\nclass Saliency:\n r\"\"\"\n Init saliency detection pipeline to generate mask from infrared images.\n \"\"\"\n\n def __init__(self, url: str):\n # init device\n device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')\n logging.info(f'deploy u2net on device {str(device)}')\n self.device = device\n\n # init u2net small (u2netp)\n net = U2NETP(in_ch=1, out_ch=1)\n logging.info(f'init u2net small model with (1 -> 1)')\n self.net = net\n\n # download pretrained parameters\n ckpt_p = Path.cwd() / 'weights' / 'v1' / 'u2netp.pth'\n logging.info(f'download pretrained u2net weights from {url}')\n socket.setdefaulttimeout(5)\n try:\n logging.info(f'starting download of pretrained weights from {url}')\n ckpt = torch.hub.load_state_dict_from_url(url, model_dir=ckpt_p.parent, map_location='cpu')\n except Exception as err:\n logging.fatal(f'load {url} failed: {err}, try download pretrained weights manually')\n sys.exit(1)\n net.load_state_dict(ckpt)\n logging.info(f'load pretrained u2net weights from {str(ckpt_p)}')\n\n # move to device\n net.to(device)\n\n # more parameters\n self.transform_fn = Compose([Resize(size=(320, 320)), Normalize(mean=0.485, std=0.229)])\n\n @torch.inference_mode()\n def inference(self, src: str | Path, dst: str | Path):\n # create save folder\n dst = Path(dst)\n dst.mkdir(parents=True, exist_ok=True)\n logging.debug(f'create save folder {str(dst)}')\n\n # forward\n self.net.eval()\n warnings.filterwarnings(action='ignore', lineno=780)\n img_list = sorted(Path(src).rglob('*.png'))\n logging.info(f'load {len(img_list)} images from {str(src)}')\n process = tqdm(img_list)\n for img_p in process:\n process.set_description(f'generate mask for {img_p.name} to {str(dst)}')\n img = self._imread(img_p).to(self.device)\n reverse_fn = Resize(size=img.shape[-2:])\n img = self.transform_fn(img)\n mask = self.net(img.unsqueeze(0))[0]\n mask = (mask - mask.min()) / (mask.max() - mask.min())\n mask = reverse_fn(mask).squeeze()\n cv2.imwrite(str(dst / img_p.name), tensor_to_image(mask) * 255)\n\n @staticmethod\n def _imread(img_p: str | Path):\n img = cv2.imread(str(img_p), cv2.IMREAD_GRAYSCALE)\n img = image_to_tensor(img).float() / 255\n return img\n"
},
{
"path": "pipeline/train.py",
"content": "import logging\nfrom functools import reduce\nfrom pathlib import Path\n\nimport torch\nimport wandb\nfrom kornia.filters import SpatialGradient\nfrom kornia.losses import SSIMLoss\nfrom kornia.metrics import AverageMeter\nfrom torch import nn, Tensor\nfrom torch.optim import RMSprop\nfrom torch.utils.data import DataLoader\nfrom torchvision import transforms\nfrom tqdm import tqdm\n\nfrom functions.div_loss import div_loss\nfrom modules.discriminator import Discriminator\nfrom modules.generator import Generator\nfrom utils.environment_probe import EnvironmentProbe\nfrom utils.fusion_data import FusionData\n\n\nclass Train:\n \"\"\"\n The train process for TarDAL.\n \"\"\"\n\n def __init__(self, environment_probe: EnvironmentProbe, config: dict):\n logging.info(f'TarDAL Training | mask: {config.mask} | weight: {config.weight} | adv: {config.adv_weight}')\n self.config = config\n self.environment_probe = environment_probe\n\n # modules\n logging.info(f'generator | dim: {config.dim} | depth: {config.depth}')\n self.generator = Generator(config.dim, config.depth)\n logging.info(f'discriminator | dim: {config.dim} | size: {config.size}')\n self.dis_target = Discriminator(config.dim, (config.size, config.size))\n self.dis_detail = Discriminator(config.dim, (config.size, config.size))\n\n # WGAN adam optim\n logging.info(f'RMSprop | learning rate: {config.learning_rate}')\n self.opt_generator = RMSprop(self.generator.parameters(), lr=config.learning_rate)\n self.opt_dis_target = RMSprop(self.dis_target.parameters(), lr=config.learning_rate)\n self.opt_dis_detail = RMSprop(self.dis_detail.parameters(), lr=config.learning_rate)\n\n # move to device\n logging.info(f'module device: {environment_probe.device}')\n self.generator.to(environment_probe.device)\n self.dis_target.to(environment_probe.device)\n self.dis_detail.to(environment_probe.device)\n\n # loss\n self.l1 = nn.L1Loss(reduction='none')\n self.ssim = SSIMLoss(window_size=11, reduction='none')\n self.l1.cuda()\n self.ssim.cuda()\n\n # functions\n self.spatial = SpatialGradient('diff')\n\n # WGAN div hyper parameters\n self.wk, self.wp = 2, 6\n\n # datasets\n folder = Path(config.folder)\n resize = transforms.Resize((config.size, config.size))\n dataset = FusionData(folder, config.mask, 'train', transforms=resize)\n self.dataloader = DataLoader(dataset, config.batch_size, True, num_workers=config.num_workers, pin_memory=True)\n logging.info(f'dataset | folder: {str(folder)} | size: {len(self.dataloader) * config.batch_size}')\n\n def train_dis_target(self, ir: Tensor, vi: Tensor, mk: Tensor) -> Tensor:\n \"\"\"\n Train target discriminator for 'ir * m <- pixel -> fus * m'\n \"\"\"\n\n logging.debug('train target discriminator')\n # switch to train mode\n self.dis_target.train()\n\n # sample real & fake\n real_s = ir * mk\n self.generator.eval()\n fake_s = self.generator(ir, vi).detach() * mk\n\n # judge value towards real & fake\n real_v = torch.squeeze(self.dis_target(real_s))\n fake_v = torch.squeeze(self.dis_target(fake_s))\n\n # loss calculate\n real_l, fake_l = -real_v.mean(), fake_v.mean()\n div = div_loss(self.dis_target, real_s, fake_s, self.wp)\n loss = real_l + fake_l + self.wk * div\n\n # backward\n self.opt_dis_target.zero_grad()\n loss.backward()\n self.opt_dis_target.step()\n\n return loss.item()\n\n def train_dis_detail(self, ir: Tensor, vi: Tensor, mk: Tensor) -> Tensor:\n \"\"\"\n Train detail discriminator for 'vi * (1-m) <- Grad -> fus * (1-m)'\n \"\"\"\n\n logging.debug('train detail discriminator')\n # switch to train mode\n self.dis_detail.train()\n\n # sample real & fake\n real_s = self.gradient(vi * (1 - mk))\n self.generator.eval()\n fake_s = self.gradient(self.generator(ir, vi).detach() * (1 - mk))\n\n # judge value towards real & fake\n real_v = torch.squeeze(self.dis_detail(real_s))\n fake_v = torch.squeeze(self.dis_detail(fake_s))\n\n # loss calculate\n real_l, fake_l = -real_v.mean(), fake_v.mean()\n div = div_loss(self.dis_detail, real_s, fake_s, self.wp)\n loss = real_l + fake_l + self.wk * div\n\n # backward\n self.opt_dis_detail.zero_grad()\n loss.backward()\n self.opt_dis_detail.step()\n\n return loss.item()\n\n def gradient(self, x: Tensor, eps: float = 1e-6) -> Tensor:\n s = self.spatial(x)\n dx, dy = s[:, :, 0, :, :], s[:, :, 1, :, :]\n u = torch.sqrt(torch.pow(dx, 2) + torch.pow(dy, 2) + eps)\n return u\n\n def train_generator(self, ir: Tensor, vi: Tensor, mk: Tensor, s1: Tensor, s2: Tensor) -> dict:\n \"\"\"\n Train generator 'ir + vi -> fus'\n \"\"\"\n\n logging.debug('train generator')\n self.generator.train()\n fus = self.generator(ir, vi)\n\n # calculate loss towards criterion\n b1, b2, b3 = self.config.weight # b1 * ssim + b2 * l1 + b3 * adv\n\n l_ir = b1 * self.ssim(fus, ir) + b2 * self.l1(fus, ir)\n l_vi = b1 * self.ssim(fus, vi) + b2 * self.l1(fus, vi)\n\n w1, w2 = 0.5 + 0.5 * (s1 - s2), 0.5 + 0.5 * (s2 - s1) # data driven loss weights\n l_src = w1 * l_ir + w2 * l_vi # fus <- ssim + l1 -> (ir, vi)\n l_src = l_src.mean()\n\n self.dis_target.eval()\n l_target = -self.dis_target(fus * mk).mean() # judge target: fus * m\n self.dis_detail.eval()\n l_detail = -self.dis_detail(self.gradient(fus * (1 - mk))).mean() # judge detail: Grad(fus * (1-mk))\n\n c1, c2 = self.config.adv_weight # c1 * l_target + c2 * l_detail\n l_adv = c1 * l_target + c2 * l_detail\n\n loss = l_src + b3 * l_adv\n\n # backward\n self.opt_generator.zero_grad()\n loss.backward()\n self.opt_generator.step()\n\n # loss state\n state = {\n 'g_loss': loss.item(),\n 'g_src_ir': l_ir.mean().item(),\n 'g_src_vi': l_vi.mean().item(),\n 'g_adv_target': l_target.item(),\n 'g_adv_detail': l_detail.item(),\n }\n\n return state\n\n def run(self):\n for epoch in range(1, self.config.epochs + 1):\n process = tqdm(enumerate(self.dataloader), disable=not self.config.debug)\n meter = AverageMeter()\n for idx, sample in process:\n ir, vi, mk = sample['ir'], sample['vi'], sample['mk']\n s1, s2 = sample['vsm']['ir'], sample['vsm']['vi']\n im = torch.cat([ir, vi, mk, s1, s2], dim=1)\n im = im.to(self.environment_probe.device)\n ir, vi, mk, s1, s2 = torch.chunk(im, 5, dim=1)\n\n g_loss = self.train_generator(ir, vi, mk, s1, s2)\n d_target_loss = self.train_dis_target(ir, vi, mk)\n d_detail_loss = self.train_dis_detail(ir, vi, mk)\n\n process.set_description(f'g: {g_loss[\"g_loss\"]:03f} | d: {d_target_loss:03f}, {d_detail_loss:03f}')\n meter.update(Tensor(list(g_loss.values()) + [d_target_loss] + [d_detail_loss]))\n\n keys = ['g_loss', 'g_src_ir', 'g_src_vi', 'g_adv_t', 'g_adv_d', 'd_t', 'd_d']\n state = reduce(lambda x, y: x | y, [{k: v} for k, v in zip(keys, meter.avg)])\n print(state)\n wandb.log(state)\n if epoch % 5 == 0:\n self.save(epoch)\n\n def save(self, epoch: int):\n path = Path(self.config.cache) / self.config.id\n path.mkdir(parents=True, exist_ok=True)\n cache = path / f'{epoch:03d}.pth'\n logging.info(f'save checkpoint to {str(cache)}')\n state = {\n 'g': self.generator.state_dict(),\n 'd': {\n 't': self.dis_target.state_dict(),\n 'd': self.dis_target.state_dict(),\n },\n 'opt': {\n 'g': self.opt_generator.state_dict(),\n 't': self.opt_dis_target.state_dict(),\n 'd': self.opt_dis_detail.state_dict(),\n },\n }\n torch.save(state, cache)\n"
},
{
"path": "requirements.txt",
"content": "# TarDAL requirements\n# Usage: pip install -r requirements.txt\n\n# Base ----------------------------------------\nnumpy>=1.20\ntorch>=1.9\ntorchvision>=0.10\nkornia>=0.6.8\nopencv-python>=4.5.5.64\nPyYAML>=6.0\npandas>=1.5.1\nmatplotlib>=3.6.3\n\n# Logging -------------------------------------\nwandb>=0.12.11\ntqdm>=4.63.0\ntabulate>=0.8.9\n"
},
{
"path": "scripts/__init__.py",
"content": "from scripts.infer_f import InferF\nfrom scripts.infer_fd import InferFD\nfrom scripts.train_f import TrainF\nfrom scripts.train_fd import TrainFD\n\n__all__ = ['TrainF', 'TrainFD', 'InferF', 'InferFD']\n"
},
{
"path": "scripts/infer_f.py",
"content": "import logging\nfrom pathlib import Path\n\nimport torch\nimport yaml\nfrom kornia.color import ycbcr_to_rgb\nfrom torch.utils.data import DataLoader\nfrom tqdm import tqdm\n\nimport loader\nfrom config import ConfigDict, from_dict\nfrom pipeline.fuse import Fuse\nfrom tools.dict_to_device import dict_to_device\n\n\nclass InferF:\n def __init__(self, config: str | Path | ConfigDict, save_dir: str | Path):\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level='INFO', format=log_f)\n logging.info(f'TarDAL-v1 Inference Script')\n\n # init config\n if isinstance(config, str) or isinstance(config, Path):\n config = yaml.safe_load(Path(config).open('r'))\n config = from_dict(config) # convert dict to object\n else:\n config = config\n self.config = config\n\n # debug mode\n if config.debug.fast_run:\n logging.warning('fast run mode is on, only for debug!')\n\n # create save(output) folder\n save_dir = Path(save_dir)\n save_dir.mkdir(parents=True, exist_ok=True)\n logging.info(f'create save folder {str(save_dir)}')\n self.save_dir = save_dir\n\n # init dataset & dataloader\n data_t = getattr(loader, config.dataset.name) # dataset type\n self.data_t = data_t\n p_dataset = data_t(root=config.dataset.root, mode='pred', config=config)\n self.p_loader = DataLoader(\n p_dataset, batch_size=config.inference.batch_size, shuffle=False,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.inference.num_workers,\n )\n\n # init pipeline\n fuse = Fuse(config, mode='inference')\n self.fuse = fuse\n\n @torch.inference_mode()\n def run(self):\n p_l = tqdm(self.p_loader, total=len(self.p_loader), ncols=120)\n for sample in p_l:\n sample = dict_to_device(sample, self.fuse.device)\n # f_net forward\n fus = self.fuse.inference(ir=sample['ir'], vi=sample['vi'])\n # recolor\n if self.data_t.color and self.config.inference.grayscale is False:\n fus = torch.cat([fus, sample['cbcr']], dim=1)\n fus = ycbcr_to_rgb(fus)\n # save images\n self.data_t.pred_save(\n fus, [self.save_dir / name for name in sample['name']],\n shape=sample['shape']\n )\n"
},
{
"path": "scripts/infer_fd.py",
"content": "import logging\nfrom pathlib import Path\n\nimport torch\nimport yaml\nfrom kornia.color import ycbcr_to_rgb\nfrom torch.utils.data import DataLoader\nfrom tqdm import tqdm\n\nimport loader\nfrom config import ConfigDict, from_dict\nfrom pipeline.detect import Detect\nfrom pipeline.fuse import Fuse\nfrom tools.dict_to_device import dict_to_device\n\n\nclass InferFD:\n def __init__(self, config: str | Path | ConfigDict, save_dir: str | Path):\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level='INFO', format=log_f)\n logging.info(f'TarDAL-v1 Inference Script')\n\n # init config\n if isinstance(config, str) or isinstance(config, Path):\n config = yaml.safe_load(Path(config).open('r'))\n config = from_dict(config) # convert dict to object\n else:\n config = config\n self.config = config\n\n # debug mode\n if config.debug.fast_run:\n logging.warning('fast run mode is on, only for debug!')\n\n # save label as txt warning\n if config.inference.save_txt:\n logging.warning('labels will be saved as txt, this will slow down the inference speed!')\n\n # create save(output) folder\n save_dir = Path(save_dir)\n save_dir.mkdir(parents=True, exist_ok=True)\n (save_dir / 'images').mkdir(exist_ok=True)\n (save_dir / 'labels').mkdir(exist_ok=True)\n logging.info(f'create save folder {str(save_dir)}')\n self.save_dir = save_dir\n\n # init dataset & dataloader\n data_t = getattr(loader, config.dataset.name) # dataset type\n self.data_t = data_t\n p_dataset = data_t(root=config.dataset.root, mode='pred', config=config)\n self.p_loader = DataLoader(\n p_dataset, batch_size=config.inference.batch_size, shuffle=False,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.inference.num_workers,\n )\n\n # init pipeline\n fuse = Fuse(config, mode='inference')\n self.fuse = fuse\n detect = Detect(config, mode='inference', nc=len(p_dataset.classes), classes=p_dataset.classes, labels=p_dataset.labels)\n self.detect = detect\n\n @torch.inference_mode()\n def run(self):\n p_l = tqdm(self.p_loader, total=len(self.p_loader), ncols=80)\n for sample in p_l:\n sample = dict_to_device(sample, self.fuse.device)\n # set description\n p_l.set_description(f'infer {sample[\"name\"][0]} ({len(sample[\"name\"])} images)')\n # f_net forward\n fus = self.fuse.inference(ir=sample['ir'], vi=sample['vi'])\n # recolor\n if self.data_t.color and self.config.inference.grayscale is False:\n fus = torch.cat([fus, sample['cbcr']], dim=1)\n fus = ycbcr_to_rgb(fus)\n # d_net forward\n pred = self.detect.inference(fus)\n # save images\n self.data_t.pred_save(\n fus, [self.save_dir / name for name in sample['name']],\n shape=sample['shape'], pred=pred,\n save_txt=self.config.inference.save_txt,\n )\n"
},
{
"path": "scripts/train_f.py",
"content": "import argparse\nimport logging\nfrom functools import reduce\nfrom pathlib import Path\n\nimport torch\nimport wandb\nimport yaml\nfrom kornia.metrics import AverageMeter\nfrom torch import Tensor\nfrom torch.optim import AdamW, Adam, SGD\nfrom torch.optim.lr_scheduler import LambdaLR\nfrom torch.utils.data import DataLoader\nfrom tqdm import tqdm\n\nimport loader\nfrom config import from_dict, ConfigDict\nfrom pipeline.fuse import Fuse\nfrom tools.dict_to_device import dict_to_device\n\n\nclass TrainF:\n def __init__(self, config: str | Path | ConfigDict, wandb_key: str):\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level='INFO', format=log_f)\n logging.info(f'TarDAL-v1 Training Script')\n\n # init config\n if isinstance(config, str) or isinstance(config, Path):\n config = yaml.safe_load(Path(config).open('r'))\n config = from_dict(config) # convert dict to object\n else:\n config = config\n self.config = config\n\n # debug mode\n if config.debug.fast_run:\n logging.warning('fast run mode is on, only for debug!')\n\n # wandb run\n wandb.login(key=wandb_key) # wandb api key\n runs = wandb.init(project='TarDAL-v1', config=config, mode=config.debug.wandb_mode)\n self.runs = runs\n\n # init save folder\n save_dir = Path(self.config.save_dir) / self.runs.id\n save_dir.mkdir(parents=True, exist_ok=True)\n self.save_dir = save_dir\n logging.info(f'model weights will be saved to {str(save_dir)}')\n\n # init pipeline\n fuse = Fuse(config, mode='train')\n self.fuse = fuse\n\n # freeze & grad\n for k, v in fuse.generator.named_parameters():\n v.requires_grad = True # train all layers\n if any(x in k for x in config.train.freeze):\n logging.info(f'freezing {k}')\n v.requires_grad = False\n\n # init optimizer\n o_cfg = config.optimizer\n fuse_pg = fuse.param_groups() # [weight(with decay), weight(no decay), bias]\n groups = [\n {'params': fuse_pg[0], 'lr': o_cfg.lr_i, 'weight_decay': o_cfg.weight_decay},\n {'params': fuse_pg[1], 'lr': o_cfg.lr_i, 'weight_decay': 0},\n ]\n match o_cfg.name:\n case 'sgd':\n optimizer = SGD(fuse_pg[2], lr=o_cfg.lr_i, momentum=o_cfg.momentum, nesterov=True)\n case 'adam':\n optimizer = Adam(fuse_pg[2], lr=o_cfg.lr_i, betas=(o_cfg.momentum, 0.999))\n case 'adamw':\n optimizer = AdamW(fuse_pg[2], lr=o_cfg.lr_i, betas=(o_cfg.momentum, 0.999), weight_decay=0)\n case _:\n optimizer = None\n assert NotImplemented, f'unsupported optimizer: {o_cfg.name}'\n self.optimizer = optimizer\n self.optimizer.add_param_group(groups[0])\n self.optimizer.add_param_group(groups[1])\n\n # init scheduler\n lr_fn = lambda x: (1 - x / config.train.epochs) * (1 - o_cfg.lr_f) + o_cfg.lr_f\n self.scheduler = LambdaLR(self.optimizer, lr_lambda=lr_fn)\n\n # init dataset & dataloader\n data_t = getattr(loader, config.dataset.name) # dataset type\n t_dataset = data_t(root=config.dataset.root, mode='train', config=config)\n v_dataset = data_t(root=config.dataset.root, mode='val', config=config)\n self.t_loader = DataLoader(\n t_dataset, batch_size=config.train.batch_size, shuffle=True,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.train.num_workers,\n )\n self.v_loader = DataLoader(\n v_dataset, batch_size=config.train.batch_size,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.train.num_workers,\n )\n\n def run(self):\n # epochs & eval interval & save interval\n epochs = self.config.train.epochs\n e_interval = self.config.train.eval_interval\n s_interval = self.config.train.save_interval\n # start training process\n for epoch in range(1, epochs + 1):\n # train\n t_l = tqdm(self.t_loader, disable=False, total=len(self.t_loader) if not self.config.debug.fast_run else 3, ncols=120)\n g_history = [AverageMeter() for _ in range(5)] # tot, src, adv, tar, det\n disc_history = AverageMeter(), AverageMeter() # target, detail\n log_dict = {}\n for sample in t_l:\n sample = dict_to_device(sample, self.fuse.device)\n # train generator\n g_loss, [src_l, adv_l, tar_l, det_l] = self.fuse.criterion_generator(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n w1=sample['ir_w'], w2=sample['vi_w'],\n d_warming=epoch <= self.config.loss.fuse.d_warm,\n )\n g_history[0].update(g_loss.item())\n _ = [g_history[idx + 1].update(v) for idx, v in enumerate([src_l, adv_l, tar_l, det_l])]\n self.optim(g_loss)\n # train target discriminator\n d_t_loss = self.fuse.criterion_dis_t(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n )\n disc_history[0].update(d_t_loss.item())\n self.optim(d_t_loss)\n # train detail discriminator\n d_d_loss = self.fuse.criterion_dis_d(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n )\n disc_history[1].update(d_d_loss.item())\n self.optim(d_d_loss)\n # fast run (jump out)\n if self.config.debug.fast_run and t_l.n > 2:\n logging.info('fast mode: jump')\n break\n # train logs\n g_l, src_l, adv_l, tar_l, det_l = [g_history[i].avg for i in range(5)]\n d_t_l, d_d_l = disc_history[0].avg, disc_history[1].avg\n log_dict |= {'g/tot': g_l, 'g/src': src_l, 'g/adv': adv_l, 'g/tar': d_t_l, 'g/det': d_d_l, 'disc/tar': tar_l, 'disc/det': det_l}\n logging.info(f'Epoch {epoch}/{epochs} | Generator Loss: {g_l:.4f} | Source Loss: {src_l:.4f} | Adversarial Loss: {adv_l:.4f}')\n\n # eval (fuse: show in wandb)\n if epoch % e_interval == 0 or self.config.debug.fast_run:\n e_l = tqdm(self.v_loader, disable=True)\n for sample in e_l:\n sample = dict_to_device(sample, self.fuse.device)\n fus = self.fuse.eval(ir=sample['ir'], vi=sample['vi'])\n log_dict |= {'fuse': wandb.Image(fus), 'mask': wandb.Image(sample['mask'])}\n break\n # update scheduler and show lr\n log_dict |= reduce(lambda x, y: x | y, [{f'lr_{i}': v['lr']} for i, v in enumerate(self.optimizer.param_groups)])\n self.scheduler.step()\n\n # update wandb\n self.runs.log(log_dict)\n # save model\n if epoch % s_interval == 0 or self.config.debug.fast_run:\n ckpt = self.fuse.save_ckpt()\n torch.save(ckpt, self.save_dir / f'{str(epoch).zfill(5)}.pth')\n logging.info(f'Epoch {epoch}/{epochs} | Model Saved')\n\n def optim(self, loss: Tensor):\n self.optimizer.zero_grad()\n loss.backward()\n self.optimizer.step()\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser()\n parser.add_argument('--cfg', default='config/default.yaml', help='config file path')\n parser.add_argument('--auth', help='wandb auth api key')\n args = parser.parse_args()\n train = TrainF(args.cfg, args.auth)\n train.run()\n"
},
{
"path": "scripts/train_fd.py",
"content": "import argparse\nimport logging\nimport sys\nfrom functools import reduce\nfrom itertools import chain\nfrom pathlib import Path\n\nimport numpy\nimport torch\nimport wandb\nimport yaml\nfrom kornia.color import ycbcr_to_rgb\nfrom kornia.metrics import AverageMeter\nfrom torch.nn.utils import clip_grad_norm_\nfrom torch.optim.lr_scheduler import LambdaLR\nfrom torch.utils.data import DataLoader\nfrom tqdm import tqdm\n\nimport loader\nfrom config import from_dict, ConfigDict\nfrom module.detect.utils.metrics import ap_per_class\nfrom pipeline.detect import Detect\nfrom pipeline.fuse import Fuse\nfrom scripts.utils.smart_optimizer import smart_optimizer\nfrom tools.dict_to_device import dict_to_device\n\n\nclass TrainFD:\n def __init__(self, config: str | Path | ConfigDict, wandb_key: str):\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level='INFO', format=log_f)\n logging.info(f'TarDAL-v1 Training Script')\n\n # init config\n if isinstance(config, str) or isinstance(config, Path):\n config = yaml.safe_load(Path(config).open('r'))\n config = from_dict(config) # convert dict to object\n else:\n config = config\n self.config = config\n\n # debug mode\n if config.debug.fast_run:\n logging.warning('fast run mode is on, only for debug!')\n\n # wandb run\n wandb.login(key=wandb_key) # wandb api key\n runs = wandb.init(project='TarDAL-v1', config=config, mode=config.debug.wandb_mode)\n self.runs = runs\n\n # init save folder\n save_dir = Path(config.save_dir) / runs.id\n save_dir.mkdir(parents=True, exist_ok=True)\n self.save_dir = save_dir\n logging.info(f'model weights will be saved to {str(save_dir)}')\n\n # load dataset\n data_t = getattr(loader, config.dataset.name)\n self.data_t = data_t\n t_dataset = data_t(root=config.dataset.root, mode='train', config=config)\n v_dataset = data_t(root=config.dataset.root, mode='val', config=config)\n if 'detect' not in t_dataset.type:\n logging.fatal(f'dataset {config.dataset.name} not support detect')\n sys.exit(1)\n self.t_loader = DataLoader(\n t_dataset, batch_size=config.train.batch_size, shuffle=True,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.train.num_workers,\n )\n self.v_loader = DataLoader(\n v_dataset, batch_size=config.train.batch_size,\n collate_fn=data_t.collate_fn, pin_memory=True, num_workers=config.train.num_workers,\n )\n\n # init pipeline\n fuse = Fuse(config, mode='train')\n self.fuse = fuse\n detect = Detect(config, mode='train', nc=len(t_dataset.classes), classes=t_dataset.classes, labels=t_dataset.labels)\n self.detect = detect\n\n # freeze & grad\n for k, v in chain(fuse.generator.named_parameters(), detect.net.named_parameters()):\n v.requires_grad = True # train all layers\n if any(x in k for x in config.train.freeze):\n logging.info(f'freezing {k}')\n v.requires_grad = False\n\n # init fuse optimizer\n o_cfg = config.optimizer\n f_p, d_p = fuse.param_groups('g'), detect.param_groups()\n self.fd_opt = smart_optimizer(o_cfg, tuple(f_p[i] + d_p[i] for i in range(3)))\n self.disc_opt = smart_optimizer(o_cfg, fuse.param_groups('d'), lr=o_cfg.lr_d)\n\n # init scheduler\n lr_fn = lambda x: (1 - x / config.train.epochs) * (1 - o_cfg.lr_f) + o_cfg.lr_f\n self.lr_fn = lr_fn\n self.scheduler = LambdaLR(self.fd_opt, lr_lambda=lr_fn)\n\n # hyperparameters check\n # bridge warm & scheduler warm phase.0\n if config.loss.bridge.warm != config.scheduler.warmup_epochs[0]:\n logging.warning(f'overwriting bridge warm {config.loss.bridge.warm} with {config.scheduler.warmup_epochs[0]}')\n config.loss.bridge.warm = config.scheduler.warmup_epochs[0]\n # discriminator warm & bridge warm\n if config.loss.fuse.d_warm >= config.loss.bridge.warm / 2:\n logging.warning(f'overwriting discriminator warm {config.loss.fuse.d_warm} with {round(config.loss.bridge.warm / 2)}')\n config.loss.fuse.d_warm = round(config.loss.bridge.warm / 2)\n\n def run(self):\n # epochs & eval interval & save interval\n epochs = self.config.train.epochs\n e_interval = self.config.train.eval_interval\n s_interval = self.config.train.save_interval\n # history switch\n best_map = -1\n\n # start training process\n l_opt_shot = -1\n n_batch_size = 64\n accumulate = max(round(n_batch_size / self.config.train.batch_size), 1)\n for epoch in range(1, epochs + 1):\n # train\n t_l = tqdm(self.t_loader, disable=False, total=len(self.t_loader) if not self.config.debug.fast_run else 3, ncols=120)\n # recorder\n g_history = AverageMeter() # generator total loss\n f_history = [AverageMeter() for _ in range(5)] # fuse loss: tot, src, adv, tar, det\n d_history = [AverageMeter() for _ in range(4)] # detect loss: tot, box, obj, cls\n disc_history = AverageMeter(), AverageMeter() # discriminator loss: target, detail\n log_dict = {}\n # warm up shots, max(warmup_epochs, 100 shots)\n w_config = self.config.scheduler\n w_shots_0 = max(round(w_config.warmup_epochs[0] * len(self.t_loader)), 100) # bridge warm\n w_shots_1 = max(round(w_config.warmup_epochs[1] * len(self.t_loader)), 100) # normal warm\n w_shots = (w_shots_0, w_shots_1)\n # process\n self.fd_opt.zero_grad()\n for idx, sample in enumerate(t_l):\n # warm up\n c_shots = idx + len(self.t_loader) * (epoch - 1)\n if c_shots < w_shots[0]:\n for jdx, x in enumerate(self.fd_opt.param_groups):\n x['lr'] = w_config.warmup_bias_lr if jdx == 0 else 0\n if 'momentum' in x:\n x['momentum'] = w_config.warmup_momentum\n if w_shots[0] <= c_shots < w_shots[1]:\n x_shot = [c_shots, w_shots[1] + c_shots]\n # accumulate = max(1, numpy.interp(c_shots, x_shot, [1, n_batch_size / self.config.train.batch_size]).round())\n for jdx, x in enumerate(self.fd_opt.param_groups):\n o_config = self.config.optimizer\n # bias lr falls from 0.1 to lr_i, all other lrs rise from 0.0 to lr_i\n w_range = [w_config.warmup_bias_lr if jdx == 0 else 0, x['initial_lr'] * self.lr_fn(epoch - 1)]\n x['lr'] = numpy.interp(c_shots, x_shot, w_range)\n if 'momentum' in x:\n x['momentum'] = numpy.interp(c_shots, x_shot, [w_config.warmup_momentum, o_config.momentum])\n lr_s = [x['lr'] for x in self.fd_opt.param_groups]\n logging.debug(f'adjust lr {lr_s[0]:.6f} {lr_s[1]:.6f} {lr_s[2]:.6f}')\n\n # forward\n sample = dict_to_device(sample, self.fuse.device)\n\n # train generator\n # ir & vi -> f_net -> fus -> d_net -> obj\n # loss: fus -> src + adv, obj -> ground truth\n # f_net forward and cal loss\n f_loss, [src_l, adv_l, tar_l, det_l] = self.fuse.criterion_generator(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n w1=sample['ir_w'], w2=sample['vi_w'],\n d_warming=epoch <= self.config.loss.fuse.d_warm,\n )\n fus = self.fuse.eval(ir=sample['ir'], vi=sample['vi'])\n if epoch <= self.config.loss.bridge.warm:\n fus.detach_() # (det -> det, fuse -> fuse, det no-> fuse)\n # recolor\n if self.data_t.color:\n fus = torch.cat([fus, sample['cbcr']], dim=1)\n fus = ycbcr_to_rgb(fus)\n # d_net forward and cal loss\n d_loss, [box_l, obj_l, cls_l] = self.detect.criterion(\n imgs=fus,\n targets=sample['labels'],\n )\n # merge loss\n b_c = self.config.loss.bridge\n g_loss = b_c['fuse'] * f_loss + b_c['detect'] * d_loss # generator total loss\n g_history.update(g_loss.item())\n _ = [f_history[idx].update(v) for idx, v in enumerate([f_loss.item(), src_l, adv_l, tar_l, det_l])]\n _ = [d_history[idx].update(v) for idx, v in enumerate([d_loss.item(), box_l, obj_l, cls_l])]\n # optimize\n g_loss.backward()\n if c_shots - l_opt_shot >= accumulate:\n clip_grad_norm_(chain(self.fuse.generator.parameters(), self.detect.net.parameters()), max_norm=10.0)\n self.fd_opt.step()\n self.fd_opt.zero_grad()\n l_opt_shot = c_shots\n logging.debug(f'optimize f+d | shots: {c_shots} | accumulate: {accumulate} | last: {l_opt_shot}')\n\n # train target discriminator\n d_t_loss = self.fuse.criterion_dis_t(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n )\n disc_history[0].update(d_t_loss.item())\n self.disc_opt.zero_grad()\n d_t_loss.backward()\n self.disc_opt.step()\n\n # train detail discriminator\n d_d_loss = self.fuse.criterion_dis_d(\n ir=sample['ir'], vi=sample['vi'],\n mk=sample['mask'],\n )\n disc_history[1].update(d_d_loss.item())\n self.disc_opt.zero_grad()\n d_d_loss.backward()\n self.disc_opt.step()\n\n # update description\n t_l.set_description(f'{epoch}/{epochs} | g: {g_history.avg:.4f} | f: {f_history[0].avg:.4f} | d: {d_history[0].avg:.4f}')\n\n # fast run (jump out)\n if self.config.debug.fast_run and t_l.n > 2:\n logging.info('fast mode: jump')\n break\n\n # train logs\n # fuse loss\n f_l, src_l, adv_l, tar_l, det_l = [f_history[idx].avg for idx in range(5)]\n log_dict |= {'fus/tot': f_l, 'fus/src': src_l, 'fus/adv': adv_l, 'fus/tar': tar_l, 'fus/det': det_l}\n # detect loss\n d_l, box_l, obj_l, cls_l = [d_history[idx].avg for idx in range(4)]\n log_dict |= {'det/tot': d_l, 'det/box': box_l, 'det/obj': obj_l, 'det/cls': cls_l}\n # generator loss\n g_l = g_history.avg\n log_dict |= {'gen/tot': g_l, 'gen/fus': f_l, 'gen/det': d_l}\n # discriminator loss\n d_t_l, d_d_l = [disc_history[idx].avg for idx in range(2)]\n log_dict |= {'disc/tar': d_t_l, 'disc/det': d_d_l}\n # learning rate\n lrs = [x['lr'] for x in self.fd_opt.param_groups]\n log_dict |= {'lr/0': lrs[0], 'lr/1': lrs[1], 'lr/2': lrs[2]}\n # log to console\n logging.info(f'Epoch {epoch}/{epochs} | Generator Loss: {g_l:.4f} | Fuse loss: {f_l:.4f} | Detect loss: {d_l:.4f}')\n\n # update scheduler\n self.scheduler.step()\n\n # eval (fuse & detect: print result in wandb)\n if epoch % e_interval == 0 or self.config.debug.fast_run:\n e_l = tqdm(self.v_loader, disable=False, total=len(self.v_loader) if not self.config.debug.fast_run else 3, ncols=120)\n\n # matrix\n seen = 0\n dt, p, r, f1, mp, mr, map50, map_all = [0.0, 0.0, 0.0], 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0\n j_dict, stats, ap50, ap, ap_class = [], [], [], [], []\n\n # process\n for sample in e_l:\n sample = dict_to_device(sample, self.fuse.device)\n # f_net\n fus = self.fuse.eval(ir=sample['ir'], vi=sample['vi'])\n # recolor\n if self.data_t.color:\n fus = torch.cat([fus, sample['cbcr']], dim=1)\n fus = ycbcr_to_rgb(fus)\n # d_net\n seen_x, preview = self.detect.eval(imgs=fus, targets=sample['labels'], stats=stats, preview='detect' not in log_dict)\n seen += seen_x\n if preview is not None and 'detect' not in log_dict:\n log_dict |= {'detect': wandb.Image(preview)}\n # fast run (jump out)\n if self.config.debug.fast_run and t_l.n > 2:\n logging.info('fast mode: jump')\n break\n\n # compute statistics\n stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)]\n names = reduce(lambda x, y: x | y, [{idx: name} for idx, name in enumerate(self.data_t.classes)])\n if len(stats) and stats[0].any():\n tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, names=names)\n ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95\n mp, mr, map50, map_all = p.mean(), r.mean(), ap50.mean(), ap.mean()\n num_t = numpy.bincount(stats[3].astype(int), minlength=len(self.data_t.classes)) # number of targets per class\n if num_t.sum() == 0:\n logging.warning(f'no labels found, can not compute metrics without labels.')\n\n # eval logs\n log_dict |= {'eval/precision': mp, 'eval/recall': mr, 'eval/map50': map50, 'eval/map': map_all}\n # log to console (per class)\n logging.info(f'Epoch {epoch}/{epochs} | Precision: {mp:.4f} | Recall: {mr:.4f} | mAP50: {map50:.4f} | mAP: {map_all:.4f}')\n if len(stats) and len(self.data_t.classes) > 1:\n for i, c in enumerate(ap_class):\n logging.info(\n f'{names[c]} | tot: {num_t[c]} | p: {p[i]:.4f} | r: {r[i]:.4f} | ap50: {ap50[i]:.4f} | ap: {ap[i]:.4f}'\n )\n\n # mark best\n if map_all > best_map:\n best_map = map_all\n Path(self.save_dir / 'meta.txt').write_text(f'best_map: {best_map:.4f} | epoch: {epoch}')\n ckpt = self.fuse.save_ckpt() | self.detect.save_ckpt()\n torch.save(ckpt, self.save_dir / f'{str(epoch).zfill(5)}-{best_map:.4f}.pth')\n\n # update wandb\n self.runs.log(log_dict)\n # save model\n if epoch % s_interval == 0 or self.config.debug.fast_run:\n ckpt = self.fuse.save_ckpt() | self.detect.save_ckpt()\n torch.save(ckpt, self.save_dir / f'{str(epoch).zfill(5)}.pth')\n logging.info(f'Epoch {epoch}/{epochs} | Model Saved')\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser()\n parser.add_argument('--cfg', default='config/default.yaml', help='config file path')\n parser.add_argument('--auth', help='wandb auth api key')\n args = parser.parse_args()\n train = TrainFD(args.cfg, args.auth)\n train.run()\n"
},
{
"path": "scripts/utils/smart_optimizer.py",
"content": "from typing import Tuple, List, Optional\n\nfrom torch.optim import Optimizer, AdamW, Adam, SGD\n\nfrom config import ConfigDict\n\n\ndef smart_optimizer(config: ConfigDict, param_group: Tuple[List, List, List], lr: Optional[float] = None) -> Optimizer:\n if lr is not None:\n config.lr_i = lr\n groups = [\n {'params': param_group[0], 'lr': config.lr_i, 'weight_decay': config.weight_decay},\n {'params': param_group[1], 'lr': config.lr_i, 'weight_decay': 0},\n ]\n match config.name:\n case 'sgd':\n opt = SGD(param_group[2], lr=config.lr_i, momentum=config.momentum, nesterov=True)\n case 'adam':\n opt = Adam(param_group[2], lr=config.lr_i, betas=(config.momentum, 0.999))\n case 'adamw':\n opt = AdamW(param_group[2], lr=config.lr_i, betas=(config.momentum, 0.999), weight_decay=0)\n case _:\n opt = None\n assert NotImplemented, f'unsupported optimizer: {config.name}'\n opt.add_param_group(groups[0])\n opt.add_param_group(groups[1])\n return opt\n"
},
{
"path": "tools/choose_images.py",
"content": "from functools import reduce\nfrom pathlib import Path\nfrom typing import Literal\n\nimport cv2\nimport numpy\n\n\ndef choose_images(root: str | Path, mode: str = Literal['train', 'val', 'pred']):\n root = Path(root)\n names = [x.name for x in sorted(root.glob('ir/*')) if x.suffix in ['.png', '.jpg', '.bmp']]\n save = []\n for name in names:\n x = cv2.imread(str(root / 'ir' / name), cv2.IMREAD_GRAYSCALE)\n y = cv2.imread(str(root / 'vi' / name), cv2.IMREAD_GRAYSCALE)\n t = numpy.hstack([x, y])\n cv2.imshow(name, t)\n if cv2.waitKey() == ord('s'):\n save.append(name)\n cv2.destroyWindow(name)\n meta = root / 'meta'\n meta.mkdir(parents=True, exist_ok=True)\n meta_f = meta / f'{mode}.txt'\n meta_f.write_text(reduce(lambda i, j: i + j, [t + '\\n' for t in save]))\n\n\nif __name__ == '__main__':\n choose_images('data/tno', mode='train')\n"
},
{
"path": "tools/convert_to_png.py",
"content": "import argparse\nimport logging\nfrom pathlib import Path\n\nimport cv2\nfrom tqdm import tqdm\n\n\ndef convert_to_png(src: str | Path, color: bool):\n img_list = [x for x in Path(src).rglob('*') if x.suffix in ['.bmp', '.jpg', '.tiff']]\n process = tqdm(sorted(img_list))\n for o_path in process:\n n_path = o_path.with_suffix('.png')\n process.set_description(f'convert {o_path.name} to {n_path.name}')\n img = cv2.imread(str(o_path), cv2.IMREAD_COLOR if color else cv2.IMREAD_GRAYSCALE)\n cv2.imwrite(str(n_path), img)\n o_path.unlink()\n\n\nif __name__ == '__main__':\n logging.basicConfig(level='DEBUG')\n parser = argparse.ArgumentParser('convert to png')\n parser.add_argument('--src', help='folder need to be converted')\n parser.add_argument('--color', action='store_true', help='use color mode (recommend on for vis, off for ir)')\n config = parser.parse_args()\n convert_to_png(**vars(config))\n"
},
{
"path": "tools/data_preview.py",
"content": "import argparse\nfrom pathlib import Path\nfrom typing import Optional\n\nimport cv2\nimport torch\nfrom kornia import image_to_tensor, tensor_to_image\nfrom torch import Tensor\nfrom torchvision.utils import draw_bounding_boxes\nfrom tqdm import tqdm\n\nimport loader\nfrom loader.utils.reader import label_read\n\n\ndef data_preview(img_f: str | Path, lbl_f: str | Path, dst_f: str | Path, dataset: Optional[str] = None):\n # create dst\n dst_f = Path(dst_f)\n dst_f.mkdir(parents=True, exist_ok=True)\n # images list\n img_f, lbl_f = Path(img_f), Path(lbl_f)\n img_l = sorted([x.stem for x in img_f.glob('*.png')])\n # dataset settings\n classes, palette = [], []\n if dataset is not None:\n dataset = getattr(loader, dataset)\n classes = dataset.classes\n palette = dataset.palette\n t_l = tqdm(img_l)\n for stem in t_l:\n t_l.set_description(f'draw on {stem}')\n lbl = label_read(lbl_f / f'{stem}.txt')\n img = image_to_tensor(cv2.imread(str(img_f / f'{stem}.png')))\n lbl[:, 1:] *= Tensor([img.shape[-1], img.shape[-2], img.shape[-1], img.shape[-2]])\n boxes = [x[1:] for x in lbl]\n if dataset is not None:\n cls = [classes[int(x[0])] for x in lbl]\n colors = [palette[int(x[0])] for x in lbl]\n img = draw_bounding_boxes(img, torch.stack(boxes, dim=0), cls, colors, width=3)\n else:\n img = draw_bounding_boxes(img, torch.stack(boxes, dim=0), width=3)\n cv2.imwrite(str(dst_f / f'{stem}.png'), tensor_to_image(img))\n\n\nif __name__ == '__main__':\n parser = argparse.ArgumentParser('data preview')\n parser.add_argument('--img', help='image folder')\n parser.add_argument('--lbl', help='label folder')\n parser.add_argument('--dst', help='mask output folder (we will create it if not exists)')\n parser.add_argument('--cls', required=False, help='dataset type (random if not specified)')\n config = parser.parse_args()\n data_preview(img_f=config.img, lbl_f=config.lbl, dst_f=config.dst, dataset=config.cls)\n"
},
{
"path": "tools/dict_to_device.py",
"content": "from typing import Dict\n\nfrom torch import Tensor\nfrom torch.types import Device\n\n\ndef dict_to_device(d: Dict, device: Device) -> Dict | None:\n if d is None:\n return None\n for k, v in d.items():\n if isinstance(v, Tensor):\n d[k] = d[k].to(device)\n return d\n"
},
{
"path": "tools/environment_probe.py",
"content": "import logging\nimport sys\n\nimport torch\n\n\nclass EnvironmentProbe:\n \"\"\"\n Detects the configuration of the environment and returns devices status.\n \"\"\"\n\n def __init__(self):\n python_v = sys.version.split()[0]\n pytorch_v = torch.__version__\n cuda_s = torch.cuda.is_available()\n device = torch.cuda.current_device() if cuda_s else 'cpu'\n device_n = torch.cuda.get_device_name(device)\n logging.info(f'python: {python_v} | pytorch: {pytorch_v} | gpu: {device_n if cuda_s else False}')\n self.device = device\n\n def memory_status(self):\n if not torch.cuda.is_available():\n return {'current': 'unavailable', 'max': 'unavailable'}\n memory_a = torch.cuda.memory_allocated(self.device) / 1024 ** 3\n memory_ma = torch.cuda.max_memory_allocated(self.device) / 1024 ** 3\n logging.debug(f'memory: {memory_a:.2f}GB (history max: {memory_ma:.2f}GB)')\n return {'current': memory_a, 'max': memory_ma}\n\n\nif __name__ == '__main__':\n logging.basicConfig(level=logging.DEBUG)\n probe = EnvironmentProbe()\n probe.memory_status()\n"
},
{
"path": "tools/generate_mask.py",
"content": "import argparse\nimport logging\n\nfrom pipeline.saliency import Saliency\n\n\ndef generate_mask(url: str, src: str, dst: str):\n saliency = Saliency(url=url)\n saliency.inference(src=src, dst=dst)\n\n\nif __name__ == '__main__':\n logging.basicConfig(level='INFO')\n default_url = 'https://github.com/JinyuanLiu-CV/TarDAL/releases/download/v1.0.0/u2netp.pth'\n parser = argparse.ArgumentParser('mask generator')\n parser.add_argument('--url', default=default_url, help='checkpoint url')\n parser.add_argument('--src', help='folder need to be detected')\n parser.add_argument('--dst', help='mask output folder (we will create it if not exists)')\n config = parser.parse_args()\n generate_mask(**vars(config))\n"
},
{
"path": "tools/scenario_reader.py",
"content": "import json\nimport logging\nfrom functools import reduce\nfrom pathlib import Path\n\n\ndef scenario_counter(src: str | Path):\n # read scenario from json file\n src = Path(src)\n scenarios = json.load(open(src, 'r'))\n # output as tree format\n logging.debug(f'total scenarios: {len(scenarios)}')\n tot_t_frame, tot_v_frame = 0, 0\n for scenario in scenarios:\n t_frame, v_frame = 0, 0\n frame_buf = []\n # count frame\n for scene in scenario['scene']:\n frame = 0\n for fr in scene['range']:\n frame += fr['max'] - fr['min'] + 1\n frame_buf.append(f' | -- {scene[\"name\"]} (frame: {frame}, mode: {scene[\"mode\"]})')\n if scene['mode'] == 'train':\n t_frame += frame\n else:\n v_frame += frame\n # output\n logging.debug(f'-- {scenario[\"name\"]} (scenes: {len(scenario[\"scene\"])}, train: {t_frame}, val: {v_frame})')\n _ = [logging.debug(x) for x in frame_buf]\n tot_t_frame += t_frame\n tot_v_frame += v_frame\n logging.debug(f'total train frame: {tot_t_frame}, total val frame: {tot_v_frame}')\n\n\ndef generate_meta(root: str | Path):\n root = Path(root)\n # read scenario from json file\n t_frame, v_frame = [], []\n scenarios = json.load((root / 'meta' / 'scenario.json').open('r'))\n # count frame\n for scenario in scenarios:\n for scene in scenario['scene']:\n for fr in scene['range']:\n frame = list(range(fr['min'], fr['max'] + 1))\n if scene['mode'] == 'train':\n t_frame += frame\n else:\n v_frame += frame\n # sort by index\n t_frame.sort()\n v_frame.sort()\n # write to file\n (root / 'meta' / 'train.txt').write_text(reduce(lambda i, j: i + j, [f'{str(x).zfill(5)}.png\\n' for x in t_frame]))\n (root / 'meta' / 'val.txt').write_text(reduce(lambda i, j: i + j, [f'{str(x).zfill(5)}.png\\n' for x in v_frame]))\n # total frame\n logging.info(f'total train frame: {len(t_frame)}, total val frame: {len(v_frame)}')\n\n\nif __name__ == '__main__':\n scenario_counter('data/m3fd/meta/scenario.json')\n generate_meta('data/m3fd')\n"
},
{
"path": "train.py",
"content": "import argparse\nimport logging\nfrom pathlib import Path\n\nimport torch.backends.cudnn\nimport yaml\n\nimport scripts\nfrom config import from_dict\n\nif __name__ == '__main__':\n # args parser\n parser = argparse.ArgumentParser()\n parser.add_argument('--cfg', default='config/default.yaml', help='config file path')\n parser.add_argument('--auth', help='wandb auth api key')\n args = parser.parse_args()\n\n # init config\n config = yaml.safe_load(Path(args.cfg).open('r'))\n config = from_dict(config) # convert dict to object\n config = config\n\n # init logger\n log_f = '%(asctime)s | %(filename)s[line:%(lineno)d] | %(levelname)s | %(message)s'\n logging.basicConfig(level=config.debug.log, format=log_f)\n\n # init device & anomaly detector\n torch.backends.cudnn.benchmark = True\n torch.autograd.set_detect_anomaly(True)\n\n # choose train script\n logging.info(f'enter {config.strategy} train mode')\n match config.strategy:\n case 'fuse':\n train_p = getattr(scripts, 'TrainF')\n case 'detect':\n if config.loss.bridge.fuse != 0:\n logging.warning('overwrite fuse loss weight to 0')\n config.loss.bridge.fuse = 0\n train_p = getattr(scripts, 'TrainFD')\n case 'fuse & detect':\n train_p = getattr(scripts, 'TrainFD')\n case _:\n raise ValueError(f'unknown strategy: {config.strategy}')\n\n # create script instance\n train = train_p(config, wandb_key=args.auth)\n train.run()\n"
},
{
"path": "tutorial.ipynb",
"content": "{\n \"cells\": [\n {\n \"cell_type\": \"markdown\",\n \"source\": [\n \"# TarDAL online tutorial | CVPR 2022\\n\",\n \"\\n\",\n \"This is the **official** TarDAL notebook, and is freely available for everyone.\\n\",\n \"For more information please visit [GitHub Repository](https://github.com/JinyuanLiu-CV/TarDAL).\\n\",\n \"Thank you!\"\n ],\n \"metadata\": {\n \"collapsed\": false,\n \"pycharm\": {\n \"name\": \"#%% md\\n\"\n }\n }\n },\n {\n \"cell_type\": \"markdown\",\n \"source\": [\n \"## Setup Environment\\n\",\n \"\\n\",\n \"Install requirements for TarDAL.\"\n ],\n \"metadata\": {\n \"collapsed\": false,\n \"pycharm\": {\n \"name\": \"#%% md\\n\"\n }\n }\n },\n {\n \"cell_type\": \"code\",\n \"execution_count\": null,\n \"metadata\": {\n \"collapsed\": true\n },\n \"outputs\": [],\n \"source\": [\n \"!nvidia-smi # check GPU environment\\n\",\n \"!git clone https://github.com/JinyuanLiu-CV/TarDAL.git # clone repository from GitHub\\n\",\n \"\\n\",\n \"# use python 3.10\\n\",\n \"!wget https://github.com/korakot/kora/releases/download/v0.10/py310.sh\\n\",\n \"!bash ./py310.sh -b -f -p /usr/local\\n\",\n \"!python -m ipykernel install --name \\\"py310\\\" --user\\n\",\n \"\\n\",\n \"%cd TarDAL\\n\",\n \"%pip install -r requirements.txt # install tardal requirements\\n\",\n \"%pip install -r module/detect/requirements.txt # install yolov5 requirements\"\n ]\n },\n {\n \"cell_type\": \"markdown\",\n \"source\": [\n \"## Fuse or Eval\\n\",\n \"\\n\",\n \"### Load Image (List)\\n\",\n \"\\n\",\n \"infrared image(s):\\n\",\n \"\\n\",\n \"\\n\",\n \"visible image(s):\\n\",\n \"\\n\",\n \"\\n\",\n \"### Init TarDAL Pipeline\"\n ],\n \"metadata\": {\n \"collapsed\": false\n }\n },\n {\n \"cell_type\": \"code\",\n \"execution_count\": null,\n \"outputs\": [],\n \"source\": [\n \"from scripts import InferF\\n\",\n \"from config import from_dict\\n\",\n \"import yaml\\n\",\n \"from pathlib import Path\\n\",\n \"from IPython import display\\n\",\n \"\\n\",\n \"# init config\\n\",\n \"config = yaml.safe_load(Path('config/official/colab.yaml').open('r'))\\n\",\n \"config = from_dict(config) # convert dict to object\\n\",\n \"\\n\",\n \"# init infer pipeline\\n\",\n \"infer_p = InferF(config, save_dir='runs/sample/s1')\\n\",\n \"\\n\",\n \"# generate fusion sample\\n\",\n \"infer_p.run()\\n\",\n \"\\n\",\n \"# display sample\\n\",\n \"display.Image('runs/sample/s1/M3FD_00471.png')\"\n ],\n \"metadata\": {\n \"collapsed\": false,\n \"pycharm\": {\n \"is_executing\": true\n }\n }\n },\n {\n \"cell_type\": \"markdown\",\n \"source\": [],\n \"metadata\": {\n \"collapsed\": false\n }\n }\n ],\n \"metadata\": {\n \"kernelspec\": {\n \"display_name\": \"Python 3\",\n \"language\": \"python\",\n \"name\": \"python3\"\n },\n \"language_info\": {\n \"codemirror_mode\": {\n \"name\": \"ipython\",\n \"version\": 2\n },\n \"file_extension\": \".py\",\n \"mimetype\": \"text/x-python\",\n \"name\": \"python\",\n \"nbconvert_exporter\": \"python\",\n \"pygments_lexer\": \"ipython2\",\n \"version\": \"2.7.6\"\n }\n },\n \"nbformat\": 4,\n \"nbformat_minor\": 0\n}\n"
}
]