Repository: eriklindernoren/Keras-GAN
Branch: master
Commit: 3ff3be4b4b2f
Files: 76
Total size: 179.3 KB
Directory structure:
gitextract_yxj1175v/
├── .gitignore
├── LICENSE
├── README.md
├── aae/
│ ├── aae.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── acgan/
│ ├── acgan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── bgan/
│ ├── bgan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── bigan/
│ ├── bigan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── ccgan/
│ ├── ccgan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── cgan/
│ ├── cgan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── cogan/
│ ├── cogan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── context_encoder/
│ ├── context_encoder.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── cyclegan/
│ ├── cyclegan.py
│ ├── data_loader.py
│ ├── download_dataset.sh
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── dcgan/
│ ├── dcgan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── discogan/
│ ├── data_loader.py
│ ├── discogan.py
│ ├── download_dataset.sh
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── dualgan/
│ ├── dualgan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── gan/
│ ├── gan.py
│ ├── images/
│ │ └── .gitignore
│ └── saved_model/
│ └── .gitignore
├── infogan/
│ ├── images/
│ │ └── .gitignore
│ ├── infogan.py
│ └── saved_model/
│ └── .gitignore
├── lsgan/
│ ├── images/
│ │ └── .gitignore
│ ├── lsgan.py
│ └── saved_model/
│ └── .gitignore
├── pix2pix/
│ ├── data_loader.py
│ ├── download_dataset.sh
│ ├── images/
│ │ └── .gitignore
│ ├── pix2pix.py
│ └── saved_model/
│ └── .gitignore
├── pixelda/
│ ├── data_loader.py
│ ├── images/
│ │ └── .gitignore
│ ├── pixelda.py
│ ├── saved_model/
│ │ └── .gitignore
│ └── test.py
├── requirements.txt
├── sgan/
│ ├── images/
│ │ └── .gitignore
│ ├── saved_model/
│ │ └── .gitignore
│ └── sgan.py
├── srgan/
│ ├── data_loader.py
│ ├── images/
│ │ └── .gitignore
│ ├── saved_model/
│ │ └── .gitignore
│ └── srgan.py
├── wgan/
│ ├── images/
│ │ └── .gitignore
│ ├── saved_model/
│ │ └── .gitignore
│ └── wgan.py
└── wgan_gp/
├── images/
│ └── .gitignore
├── saved_model/
│ └── .gitignore
└── wgan_gp.py
================================================
FILE CONTENTS
================================================
================================================
FILE: .gitignore
================================================
*/images/*.png
*/images/*.jpg
*/*.jpg
*/*.png
*.json
*.h5
*.hdf5
.DS_Store
*/datasets
__pycache__
================================================
FILE: LICENSE
================================================
MIT License
Copyright (c) 2017 Erik Linder-Norén
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
================================================
FILE: README.md
================================================

**This repository has gone stale as I unfortunately do not have the time to maintain it anymore. If you would like to continue the development of it as a collaborator send me an email at eriklindernoren@gmail.com.**
## Keras-GAN
Collection of Keras implementations of Generative Adversarial Networks (GANs) suggested in research papers. These models are in some cases simplified versions of the ones ultimately described in the papers, but I have chosen to focus on getting the core ideas covered instead of getting every layer configuration right. Contributions and suggestions of GAN varieties to implement are very welcomed.
See also: [PyTorch-GAN](https://github.com/eriklindernoren/PyTorch-GAN)
## Table of Contents
* [Installation](#installation)
* [Implementations](#implementations)
+ [Auxiliary Classifier GAN](#ac-gan)
+ [Adversarial Autoencoder](#adversarial-autoencoder)
+ [Bidirectional GAN](#bigan)
+ [Boundary-Seeking GAN](#bgan)
+ [Conditional GAN](#cgan)
+ [Context-Conditional GAN](#cc-gan)
+ [Context Encoder](#context-encoder)
+ [Coupled GANs](#cogan)
+ [CycleGAN](#cyclegan)
+ [Deep Convolutional GAN](#dcgan)
+ [DiscoGAN](#discogan)
+ [DualGAN](#dualgan)
+ [Generative Adversarial Network](#gan)
+ [InfoGAN](#infogan)
+ [LSGAN](#lsgan)
+ [Pix2Pix](#pix2pix)
+ [PixelDA](#pixelda)
+ [Semi-Supervised GAN](#sgan)
+ [Super-Resolution GAN](#srgan)
+ [Wasserstein GAN](#wgan)
+ [Wasserstein GAN GP](#wgan-gp)
## Installation
$ git clone https://github.com/eriklindernoren/Keras-GAN
$ cd Keras-GAN/
$ sudo pip3 install -r requirements.txt
## Implementations
### AC-GAN
Implementation of _Auxiliary Classifier Generative Adversarial Network_.
[Code](acgan/acgan.py)
Paper: https://arxiv.org/abs/1610.09585
#### Example
```
$ cd acgan/
$ python3 acgan.py
```

### Adversarial Autoencoder
Implementation of _Adversarial Autoencoder_.
[Code](aae/aae.py)
Paper: https://arxiv.org/abs/1511.05644
#### Example
```
$ cd aae/
$ python3 aae.py
```
### BiGAN
Implementation of _Bidirectional Generative Adversarial Network_.
[Code](bigan/bigan.py)
Paper: https://arxiv.org/abs/1605.09782
#### Example
```
$ cd bigan/
$ python3 bigan.py
```
### BGAN
Implementation of _Boundary-Seeking Generative Adversarial Networks_.
[Code](bgan/bgan.py)
Paper: https://arxiv.org/abs/1702.08431
#### Example
```
$ cd bgan/
$ python3 bgan.py
```
### CC-GAN
Implementation of _Semi-Supervised Learning with Context-Conditional Generative Adversarial Networks_.
[Code](ccgan/ccgan.py)
Paper: https://arxiv.org/abs/1611.06430
#### Example
```
$ cd ccgan/
$ python3 ccgan.py
```

### CGAN
Implementation of _Conditional Generative Adversarial Nets_.
[Code](cgan/cgan.py)
Paper:https://arxiv.org/abs/1411.1784
#### Example
```
$ cd cgan/
$ python3 cgan.py
```

### Context Encoder
Implementation of _Context Encoders: Feature Learning by Inpainting_.
[Code](context_encoder/context_encoder.py)
Paper: https://arxiv.org/abs/1604.07379
#### Example
```
$ cd context_encoder/
$ python3 context_encoder.py
```

### CoGAN
Implementation of _Coupled generative adversarial networks_.
[Code](cogan/cogan.py)
Paper: https://arxiv.org/abs/1606.07536
#### Example
```
$ cd cogan/
$ python3 cogan.py
```
### CycleGAN
Implementation of _Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks_.
[Code](cyclegan/cyclegan.py)
Paper: https://arxiv.org/abs/1703.10593
#### Example
```
$ cd cyclegan/
$ bash download_dataset.sh apple2orange
$ python3 cyclegan.py
```
### DCGAN
Implementation of _Deep Convolutional Generative Adversarial Network_.
[Code](dcgan/dcgan.py)
Paper: https://arxiv.org/abs/1511.06434
#### Example
```
$ cd dcgan/
$ python3 dcgan.py
```

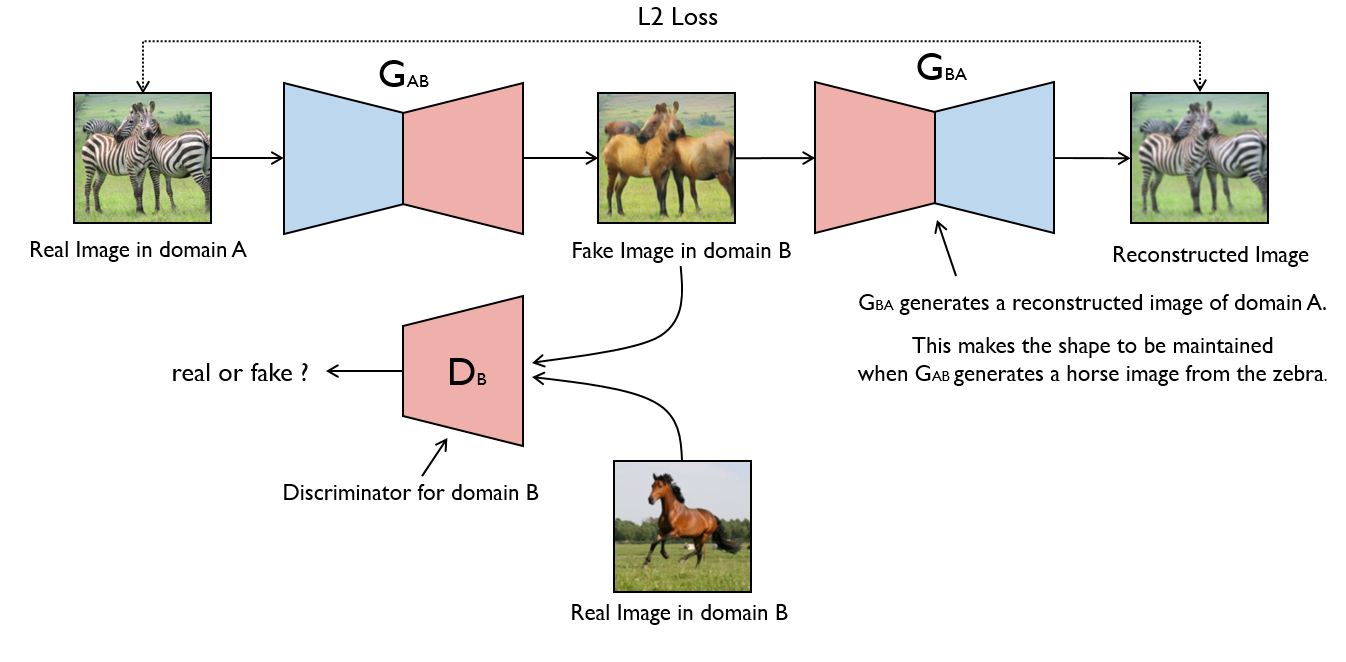
### DiscoGAN
Implementation of _Learning to Discover Cross-Domain Relations with Generative Adversarial Networks_.
[Code](discogan/discogan.py)
Paper: https://arxiv.org/abs/1703.05192
#### Example
```
$ cd discogan/
$ bash download_dataset.sh edges2shoes
$ python3 discogan.py
```

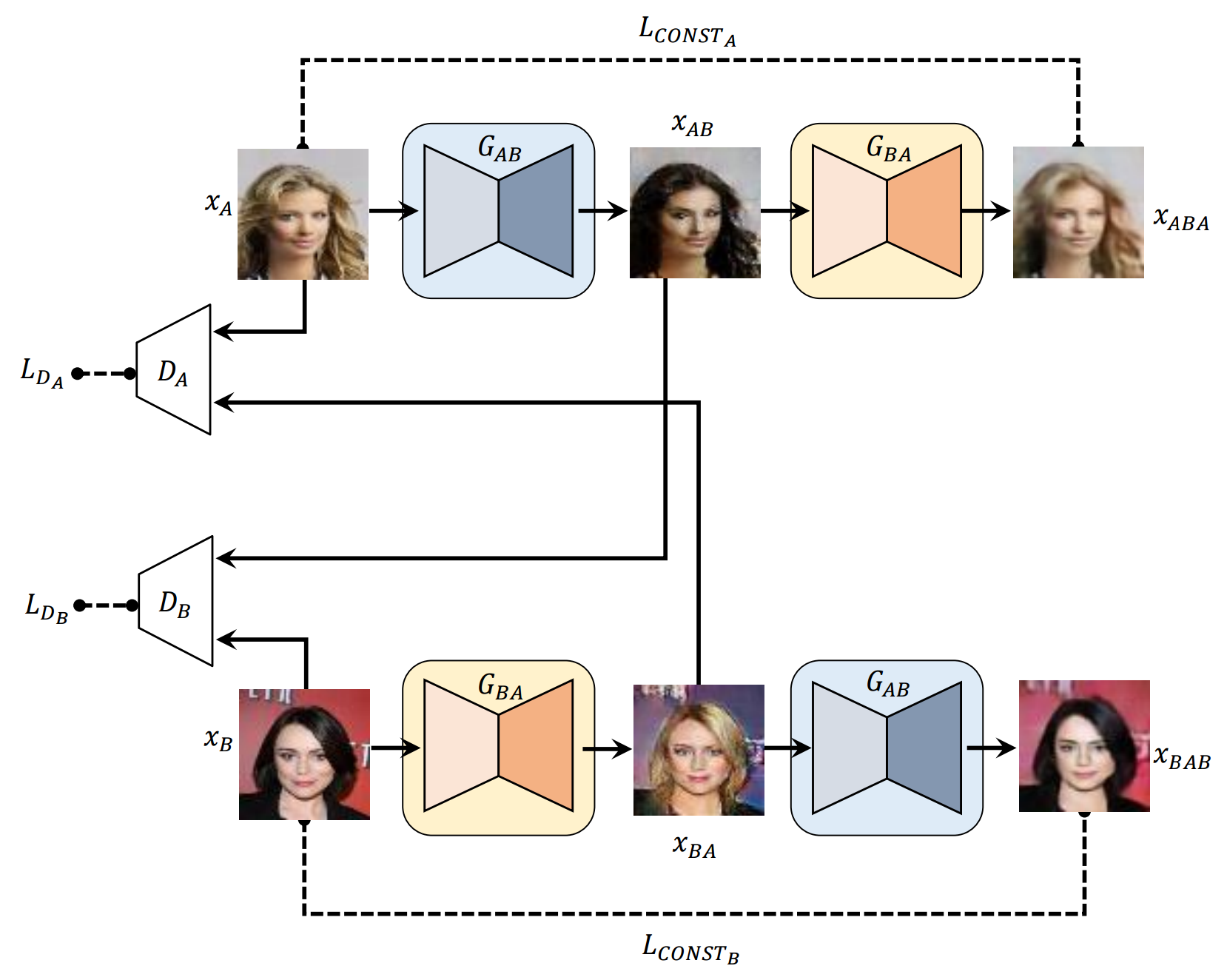
### DualGAN
Implementation of _DualGAN: Unsupervised Dual Learning for Image-to-Image Translation_.
[Code](dualgan/dualgan.py)
Paper: https://arxiv.org/abs/1704.02510
#### Example
```
$ cd dualgan/
$ python3 dualgan.py
```
### GAN
Implementation of _Generative Adversarial Network_ with a MLP generator and discriminator.
[Code](gan/gan.py)
Paper: https://arxiv.org/abs/1406.2661
#### Example
```
$ cd gan/
$ python3 gan.py
```
### InfoGAN
Implementation of _InfoGAN: Interpretable Representation Learning by Information Maximizing Generative Adversarial Nets_.
[Code](infogan/infogan.py)
Paper: https://arxiv.org/abs/1606.03657
#### Example
```
$ cd infogan/
$ python3 infogan.py
```
### LSGAN
Implementation of _Least Squares Generative Adversarial Networks_.
[Code](lsgan/lsgan.py)
Paper: https://arxiv.org/abs/1611.04076
#### Example
```
$ cd lsgan/
$ python3 lsgan.py
```
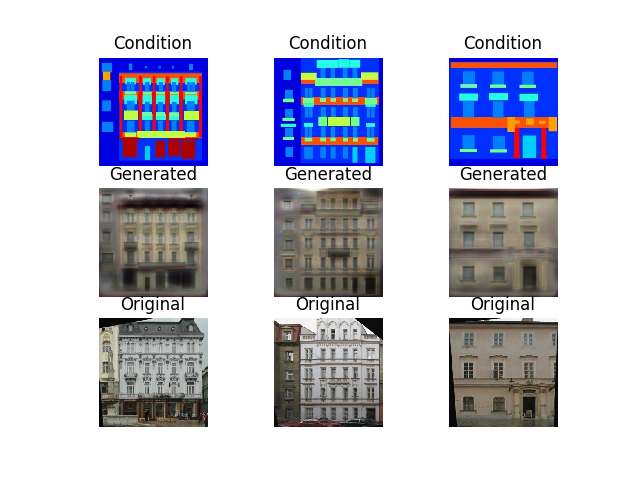
### Pix2Pix
Implementation of _Image-to-Image Translation with Conditional Adversarial Networks_.
[Code](pix2pix/pix2pix.py)
Paper: https://arxiv.org/abs/1611.07004

#### Example
```
$ cd pix2pix/
$ bash download_dataset.sh facades
$ python3 pix2pix.py
```
### PixelDA
Implementation of _Unsupervised Pixel-Level Domain Adaptation with Generative Adversarial Networks_.
[Code](pixelda/pixelda.py)
Paper: https://arxiv.org/abs/1612.05424
#### MNIST to MNIST-M Classification
Trains a classifier on MNIST images that are translated to resemble MNIST-M (by performing unsupervised image-to-image domain adaptation). This model is compared to the naive solution of training a classifier on MNIST and evaluating it on MNIST-M. The naive model manages a 55% classification accuracy on MNIST-M while the one trained during domain adaptation gets a 95% classification accuracy.
```
$ cd pixelda/
$ python3 pixelda.py
```
| Method | Accuracy |
| ------------ |:---------:|
| Naive | 55% |
| PixelDA | 95% |
### SGAN
Implementation of _Semi-Supervised Generative Adversarial Network_.
[Code](sgan/sgan.py)
Paper: https://arxiv.org/abs/1606.01583
#### Example
```
$ cd sgan/
$ python3 sgan.py
```

### SRGAN
Implementation of _Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network_.
[Code](srgan/srgan.py)
Paper: https://arxiv.org/abs/1609.04802
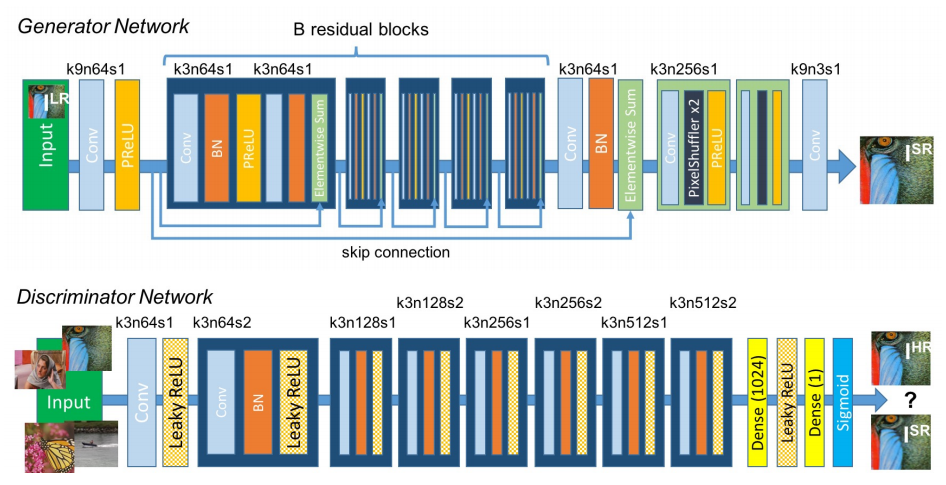
#### Example
```
$ cd srgan/
$ python3 srgan.py
```

### WGAN
Implementation of _Wasserstein GAN_ (with DCGAN generator and discriminator).
[Code](wgan/wgan.py)
Paper: https://arxiv.org/abs/1701.07875
#### Example
```
$ cd wgan/
$ python3 wgan.py
```
### WGAN GP
Implementation of _Improved Training of Wasserstein GANs_.
[Code](wgan_gp/wgan_gp.py)
Paper: https://arxiv.org/abs/1704.00028
#### Example
```
$ cd wgan_gp/
$ python3 wgan_gp.py
```

================================================
FILE: aae/aae.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, multiply, GaussianNoise
from keras.layers import BatchNormalization, Activation, Embedding, ZeroPadding2D
from keras.layers import MaxPooling2D, merge
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
from keras import losses
from keras.utils import to_categorical
import keras.backend as K
import matplotlib.pyplot as plt
import numpy as np
class AdversarialAutoencoder():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 10
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='binary_crossentropy',
optimizer=optimizer,
metrics=['accuracy'])
# Build the encoder / decoder
self.encoder = self.build_encoder()
self.decoder = self.build_decoder()
img = Input(shape=self.img_shape)
# The generator takes the image, encodes it and reconstructs it
# from the encoding
encoded_repr = self.encoder(img)
reconstructed_img = self.decoder(encoded_repr)
# For the adversarial_autoencoder model we will only train the generator
self.discriminator.trainable = False
# The discriminator determines validity of the encoding
validity = self.discriminator(encoded_repr)
# The adversarial_autoencoder model (stacked generator and discriminator)
self.adversarial_autoencoder = Model(img, [reconstructed_img, validity])
self.adversarial_autoencoder.compile(loss=['mse', 'binary_crossentropy'],
loss_weights=[0.999, 0.001],
optimizer=optimizer)
def build_encoder(self):
# Encoder
img = Input(shape=self.img_shape)
h = Flatten()(img)
h = Dense(512)(h)
h = LeakyReLU(alpha=0.2)(h)
h = Dense(512)(h)
h = LeakyReLU(alpha=0.2)(h)
mu = Dense(self.latent_dim)(h)
log_var = Dense(self.latent_dim)(h)
latent_repr = merge([mu, log_var],
mode=lambda p: p[0] + K.random_normal(K.shape(p[0])) * K.exp(p[1] / 2),
output_shape=lambda p: p[0])
return Model(img, latent_repr)
def build_decoder(self):
model = Sequential()
model.add(Dense(512, input_dim=self.latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(np.prod(self.img_shape), activation='tanh'))
model.add(Reshape(self.img_shape))
model.summary()
z = Input(shape=(self.latent_dim,))
img = model(z)
return Model(z, img)
def build_discriminator(self):
model = Sequential()
model.add(Dense(512, input_dim=self.latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(256))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(1, activation="sigmoid"))
model.summary()
encoded_repr = Input(shape=(self.latent_dim, ))
validity = model(encoded_repr)
return Model(encoded_repr, validity)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
latent_fake = self.encoder.predict(imgs)
latent_real = np.random.normal(size=(batch_size, self.latent_dim))
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch(latent_real, valid)
d_loss_fake = self.discriminator.train_on_batch(latent_fake, fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
# Train the generator
g_loss = self.adversarial_autoencoder.train_on_batch(imgs, [imgs, valid])
# Plot the progress
print ("%d [D loss: %f, acc: %.2f%%] [G loss: %f, mse: %f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss[0], g_loss[1]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 5, 5
z = np.random.normal(size=(r*c, self.latent_dim))
gen_imgs = self.decoder.predict(z)
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
def save_model(self):
def save(model, model_name):
model_path = "saved_model/%s.json" % model_name
weights_path = "saved_model/%s_weights.hdf5" % model_name
options = {"file_arch": model_path,
"file_weight": weights_path}
json_string = model.to_json()
open(options['file_arch'], 'w').write(json_string)
model.save_weights(options['file_weight'])
save(self.generator, "aae_generator")
save(self.discriminator, "aae_discriminator")
if __name__ == '__main__':
aae = AdversarialAutoencoder()
aae.train(epochs=20000, batch_size=32, sample_interval=200)
================================================
FILE: aae/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: aae/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: acgan/acgan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, multiply
from keras.layers import BatchNormalization, Activation, Embedding, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import matplotlib.pyplot as plt
import numpy as np
class ACGAN():
def __init__(self):
# Input shape
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.num_classes = 10
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
losses = ['binary_crossentropy', 'sparse_categorical_crossentropy']
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss=losses,
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise and the target label as input
# and generates the corresponding digit of that label
noise = Input(shape=(self.latent_dim,))
label = Input(shape=(1,))
img = self.generator([noise, label])
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The discriminator takes generated image as input and determines validity
# and the label of that image
valid, target_label = self.discriminator(img)
# The combined model (stacked generator and discriminator)
# Trains the generator to fool the discriminator
self.combined = Model([noise, label], [valid, target_label])
self.combined.compile(loss=losses,
optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(128 * 7 * 7, activation="relu", input_dim=self.latent_dim))
model.add(Reshape((7, 7, 128)))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(128, kernel_size=3, padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(64, kernel_size=3, padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(self.channels, kernel_size=3, padding='same'))
model.add(Activation("tanh"))
model.summary()
noise = Input(shape=(self.latent_dim,))
label = Input(shape=(1,), dtype='int32')
label_embedding = Flatten()(Embedding(self.num_classes, self.latent_dim)(label))
model_input = multiply([noise, label_embedding])
img = model(model_input)
return Model([noise, label], img)
def build_discriminator(self):
model = Sequential()
model.add(Conv2D(16, kernel_size=3, strides=2, input_shape=self.img_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(32, kernel_size=3, strides=2, padding="same"))
model.add(ZeroPadding2D(padding=((0,1),(0,1))))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(64, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(128, kernel_size=3, strides=1, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Flatten())
model.summary()
img = Input(shape=self.img_shape)
# Extract feature representation
features = model(img)
# Determine validity and label of the image
validity = Dense(1, activation="sigmoid")(features)
label = Dense(self.num_classes, activation="softmax")(features)
return Model(img, [validity, label])
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, y_train), (_, _) = mnist.load_data()
# Configure inputs
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
y_train = y_train.reshape(-1, 1)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
# Sample noise as generator input
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
# The labels of the digits that the generator tries to create an
# image representation of
sampled_labels = np.random.randint(0, 10, (batch_size, 1))
# Generate a half batch of new images
gen_imgs = self.generator.predict([noise, sampled_labels])
# Image labels. 0-9
img_labels = y_train[idx]
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch(imgs, [valid, img_labels])
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, [fake, sampled_labels])
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
# Train the generator
g_loss = self.combined.train_on_batch([noise, sampled_labels], [valid, sampled_labels])
# Plot the progress
print ("%d [D loss: %f, acc.: %.2f%%, op_acc: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[3], 100*d_loss[4], g_loss[0]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.save_model()
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 10, 10
noise = np.random.normal(0, 1, (r * c, self.latent_dim))
sampled_labels = np.array([num for _ in range(r) for num in range(c)])
gen_imgs = self.generator.predict([noise, sampled_labels])
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt,:,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/%d.png" % epoch)
plt.close()
def save_model(self):
def save(model, model_name):
model_path = "saved_model/%s.json" % model_name
weights_path = "saved_model/%s_weights.hdf5" % model_name
options = {"file_arch": model_path,
"file_weight": weights_path}
json_string = model.to_json()
open(options['file_arch'], 'w').write(json_string)
model.save_weights(options['file_weight'])
save(self.generator, "generator")
save(self.discriminator, "discriminator")
if __name__ == '__main__':
acgan = ACGAN()
acgan.train(epochs=14000, batch_size=32, sample_interval=200)
================================================
FILE: acgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: acgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: bgan/bgan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import keras.backend as K
import matplotlib.pyplot as plt
import sys
import numpy as np
class BGAN():
"""Reference: https://wiseodd.github.io/techblog/2017/03/07/boundary-seeking-gan/"""
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='binary_crossentropy',
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise as input and generated imgs
z = Input(shape=(self.latent_dim,))
img = self.generator(z)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The valid takes generated images as input and determines validity
valid = self.discriminator(img)
# The combined model (stacked generator and discriminator)
# Trains the generator to fool the discriminator
self.combined = Model(z, valid)
self.combined.compile(loss=self.boundary_loss, optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(256, input_dim=self.latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(1024))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(np.prod(self.img_shape), activation='tanh'))
model.add(Reshape(self.img_shape))
model.summary()
noise = Input(shape=(self.latent_dim,))
img = model(noise)
return Model(noise, img)
def build_discriminator(self):
model = Sequential()
model.add(Flatten(input_shape=self.img_shape))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(256))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(1, activation='sigmoid'))
model.summary()
img = Input(shape=self.img_shape)
validity = model(img)
return Model(img, validity)
def boundary_loss(self, y_true, y_pred):
"""
Boundary seeking loss.
Reference: https://wiseodd.github.io/techblog/2017/03/07/boundary-seeking-gan/
"""
return 0.5 * K.mean((K.log(y_pred) - K.log(1 - y_pred))**2)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = X_train / 127.5 - 1.
X_train = np.expand_dims(X_train, axis=3)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
# Generate a batch of new images
gen_imgs = self.generator.predict(noise)
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch(imgs, valid)
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
g_loss = self.combined.train_on_batch(noise, valid)
# Plot the progress
print ("%d [D loss: %f, acc.: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 5, 5
noise = np.random.normal(0, 1, (r * c, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
if __name__ == '__main__':
bgan = BGAN()
bgan.train(epochs=30000, batch_size=32, sample_interval=200)
================================================
FILE: bgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: bgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: bigan/bigan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, multiply, GaussianNoise
from keras.layers import BatchNormalization, Activation, Embedding, ZeroPadding2D
from keras.layers import MaxPooling2D, concatenate
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
from keras import losses
from keras.utils import to_categorical
import keras.backend as K
import matplotlib.pyplot as plt
import numpy as np
class BIGAN():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss=['binary_crossentropy'],
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# Build the encoder
self.encoder = self.build_encoder()
# The part of the bigan that trains the discriminator and encoder
self.discriminator.trainable = False
# Generate image from sampled noise
z = Input(shape=(self.latent_dim, ))
img_ = self.generator(z)
# Encode image
img = Input(shape=self.img_shape)
z_ = self.encoder(img)
# Latent -> img is fake, and img -> latent is valid
fake = self.discriminator([z, img_])
valid = self.discriminator([z_, img])
# Set up and compile the combined model
# Trains generator to fool the discriminator
self.bigan_generator = Model([z, img], [fake, valid])
self.bigan_generator.compile(loss=['binary_crossentropy', 'binary_crossentropy'],
optimizer=optimizer)
def build_encoder(self):
model = Sequential()
model.add(Flatten(input_shape=self.img_shape))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(self.latent_dim))
model.summary()
img = Input(shape=self.img_shape)
z = model(img)
return Model(img, z)
def build_generator(self):
model = Sequential()
model.add(Dense(512, input_dim=self.latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(np.prod(self.img_shape), activation='tanh'))
model.add(Reshape(self.img_shape))
model.summary()
z = Input(shape=(self.latent_dim,))
gen_img = model(z)
return Model(z, gen_img)
def build_discriminator(self):
z = Input(shape=(self.latent_dim, ))
img = Input(shape=self.img_shape)
d_in = concatenate([z, Flatten()(img)])
model = Dense(1024)(d_in)
model = LeakyReLU(alpha=0.2)(model)
model = Dropout(0.5)(model)
model = Dense(1024)(model)
model = LeakyReLU(alpha=0.2)(model)
model = Dropout(0.5)(model)
model = Dense(1024)(model)
model = LeakyReLU(alpha=0.2)(model)
model = Dropout(0.5)(model)
validity = Dense(1, activation="sigmoid")(model)
return Model([z, img], validity)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Sample noise and generate img
z = np.random.normal(size=(batch_size, self.latent_dim))
imgs_ = self.generator.predict(z)
# Select a random batch of images and encode
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
z_ = self.encoder.predict(imgs)
# Train the discriminator (img -> z is valid, z -> img is fake)
d_loss_real = self.discriminator.train_on_batch([z_, imgs], valid)
d_loss_fake = self.discriminator.train_on_batch([z, imgs_], fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
# Train the generator (z -> img is valid and img -> z is is invalid)
g_loss = self.bigan_generator.train_on_batch([z, imgs], [valid, fake])
# Plot the progress
print ("%d [D loss: %f, acc: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss[0]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_interval(epoch)
def sample_interval(self, epoch):
r, c = 5, 5
z = np.random.normal(size=(25, self.latent_dim))
gen_imgs = self.generator.predict(z)
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
if __name__ == '__main__':
bigan = BIGAN()
bigan.train(epochs=40000, batch_size=32, sample_interval=400)
================================================
FILE: bigan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: bigan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: ccgan/ccgan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, multiply, GaussianNoise
from keras.layers import BatchNormalization, Activation, Embedding, ZeroPadding2D
from keras.layers import Concatenate
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
from keras import losses
from keras.utils import to_categorical
import keras.backend as K
import scipy
import matplotlib.pyplot as plt
import numpy as np
class CCGAN():
def __init__(self):
self.img_rows = 32
self.img_cols = 32
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.mask_height = 10
self.mask_width = 10
self.num_classes = 10
# Number of filters in first layer of generator and discriminator
self.gf = 32
self.df = 32
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss=['mse', 'categorical_crossentropy'],
loss_weights=[0.5, 0.5],
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise as input and generates imgs
masked_img = Input(shape=self.img_shape)
gen_img = self.generator(masked_img)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The valid takes generated images as input and determines validity
valid, _ = self.discriminator(gen_img)
# The combined model (stacked generator and discriminator)
# Trains the generator to fool the discriminator
self.combined = Model(masked_img , valid)
self.combined.compile(loss=['mse'],
optimizer=optimizer)
def build_generator(self):
"""U-Net Generator"""
def conv2d(layer_input, filters, f_size=4, bn=True):
"""Layers used during downsampling"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if bn:
d = BatchNormalization(momentum=0.8)(d)
return d
def deconv2d(layer_input, skip_input, filters, f_size=4, dropout_rate=0):
"""Layers used during upsampling"""
u = UpSampling2D(size=2)(layer_input)
u = Conv2D(filters, kernel_size=f_size, strides=1, padding='same', activation='relu')(u)
if dropout_rate:
u = Dropout(dropout_rate)(u)
u = BatchNormalization(momentum=0.8)(u)
u = Concatenate()([u, skip_input])
return u
img = Input(shape=self.img_shape)
# Downsampling
d1 = conv2d(img, self.gf, bn=False)
d2 = conv2d(d1, self.gf*2)
d3 = conv2d(d2, self.gf*4)
d4 = conv2d(d3, self.gf*8)
# Upsampling
u1 = deconv2d(d4, d3, self.gf*4)
u2 = deconv2d(u1, d2, self.gf*2)
u3 = deconv2d(u2, d1, self.gf)
u4 = UpSampling2D(size=2)(u3)
output_img = Conv2D(self.channels, kernel_size=4, strides=1, padding='same', activation='tanh')(u4)
return Model(img, output_img)
def build_discriminator(self):
img = Input(shape=self.img_shape)
model = Sequential()
model.add(Conv2D(64, kernel_size=4, strides=2, padding='same', input_shape=self.img_shape))
model.add(LeakyReLU(alpha=0.8))
model.add(Conv2D(128, kernel_size=4, strides=2, padding='same'))
model.add(LeakyReLU(alpha=0.2))
model.add(InstanceNormalization())
model.add(Conv2D(256, kernel_size=4, strides=2, padding='same'))
model.add(LeakyReLU(alpha=0.2))
model.add(InstanceNormalization())
model.summary()
img = Input(shape=self.img_shape)
features = model(img)
validity = Conv2D(1, kernel_size=4, strides=1, padding='same')(features)
label = Flatten()(features)
label = Dense(self.num_classes+1, activation="softmax")(label)
return Model(img, [validity, label])
def mask_randomly(self, imgs):
y1 = np.random.randint(0, self.img_rows - self.mask_height, imgs.shape[0])
y2 = y1 + self.mask_height
x1 = np.random.randint(0, self.img_rows - self.mask_width, imgs.shape[0])
x2 = x1 + self.mask_width
masked_imgs = np.empty_like(imgs)
for i, img in enumerate(imgs):
masked_img = img.copy()
_y1, _y2, _x1, _x2 = y1[i], y2[i], x1[i], x2[i],
masked_img[_y1:_y2, _x1:_x2, :] = 0
masked_imgs[i] = masked_img
return masked_imgs
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, y_train), (_, _) = mnist.load_data()
# Rescale MNIST to 32x32
X_train = np.array([scipy.misc.imresize(x, [self.img_rows, self.img_cols]) for x in X_train])
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
y_train = y_train.reshape(-1, 1)
# Adversarial ground truths
valid = np.ones((batch_size, 4, 4, 1))
fake = np.zeros((batch_size, 4, 4, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Sample half batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
labels = y_train[idx]
masked_imgs = self.mask_randomly(imgs)
# Generate a half batch of new images
gen_imgs = self.generator.predict(masked_imgs)
# One-hot encoding of labels
labels = to_categorical(labels, num_classes=self.num_classes+1)
fake_labels = to_categorical(np.full((batch_size, 1), self.num_classes), num_classes=self.num_classes+1)
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch(imgs, [valid, labels])
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, [fake, fake_labels])
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
# Train the generator
g_loss = self.combined.train_on_batch(masked_imgs, valid)
# Plot the progress
print ("%d [D loss: %f, op_acc: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[4], g_loss))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
# Select a random half batch of images
idx = np.random.randint(0, X_train.shape[0], 6)
imgs = X_train[idx]
self.sample_images(epoch, imgs)
self.save_model()
def sample_images(self, epoch, imgs):
r, c = 3, 6
masked_imgs = self.mask_randomly(imgs)
gen_imgs = self.generator.predict(masked_imgs)
imgs = (imgs + 1.0) * 0.5
masked_imgs = (masked_imgs + 1.0) * 0.5
gen_imgs = (gen_imgs + 1.0) * 0.5
gen_imgs = np.where(gen_imgs < 0, 0, gen_imgs)
fig, axs = plt.subplots(r, c)
for i in range(c):
axs[0,i].imshow(imgs[i, :, :, 0], cmap='gray')
axs[0,i].axis('off')
axs[1,i].imshow(masked_imgs[i, :, :, 0], cmap='gray')
axs[1,i].axis('off')
axs[2,i].imshow(gen_imgs[i, :, :, 0], cmap='gray')
axs[2,i].axis('off')
fig.savefig("images/%d.png" % epoch)
plt.close()
def save_model(self):
def save(model, model_name):
model_path = "saved_model/%s.json" % model_name
weights_path = "saved_model/%s_weights.hdf5" % model_name
options = {"file_arch": model_path,
"file_weight": weights_path}
json_string = model.to_json()
open(options['file_arch'], 'w').write(json_string)
model.save_weights(options['file_weight'])
save(self.generator, "ccgan_generator")
save(self.discriminator, "ccgan_discriminator")
if __name__ == '__main__':
ccgan = CCGAN()
ccgan.train(epochs=20000, batch_size=32, sample_interval=200)
================================================
FILE: ccgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: ccgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: cgan/cgan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, multiply
from keras.layers import BatchNormalization, Activation, Embedding, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import matplotlib.pyplot as plt
import numpy as np
class CGAN():
def __init__(self):
# Input shape
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.num_classes = 10
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss=['binary_crossentropy'],
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise and the target label as input
# and generates the corresponding digit of that label
noise = Input(shape=(self.latent_dim,))
label = Input(shape=(1,))
img = self.generator([noise, label])
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The discriminator takes generated image as input and determines validity
# and the label of that image
valid = self.discriminator([img, label])
# The combined model (stacked generator and discriminator)
# Trains generator to fool discriminator
self.combined = Model([noise, label], valid)
self.combined.compile(loss=['binary_crossentropy'],
optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(256, input_dim=self.latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(1024))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(np.prod(self.img_shape), activation='tanh'))
model.add(Reshape(self.img_shape))
model.summary()
noise = Input(shape=(self.latent_dim,))
label = Input(shape=(1,), dtype='int32')
label_embedding = Flatten()(Embedding(self.num_classes, self.latent_dim)(label))
model_input = multiply([noise, label_embedding])
img = model(model_input)
return Model([noise, label], img)
def build_discriminator(self):
model = Sequential()
model.add(Dense(512, input_dim=np.prod(self.img_shape)))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.4))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.4))
model.add(Dense(1, activation='sigmoid'))
model.summary()
img = Input(shape=self.img_shape)
label = Input(shape=(1,), dtype='int32')
label_embedding = Flatten()(Embedding(self.num_classes, np.prod(self.img_shape))(label))
flat_img = Flatten()(img)
model_input = multiply([flat_img, label_embedding])
validity = model(model_input)
return Model([img, label], validity)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, y_train), (_, _) = mnist.load_data()
# Configure input
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
y_train = y_train.reshape(-1, 1)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random half batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs, labels = X_train[idx], y_train[idx]
# Sample noise as generator input
noise = np.random.normal(0, 1, (batch_size, 100))
# Generate a half batch of new images
gen_imgs = self.generator.predict([noise, labels])
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch([imgs, labels], valid)
d_loss_fake = self.discriminator.train_on_batch([gen_imgs, labels], fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
# Condition on labels
sampled_labels = np.random.randint(0, 10, batch_size).reshape(-1, 1)
# Train the generator
g_loss = self.combined.train_on_batch([noise, sampled_labels], valid)
# Plot the progress
print ("%d [D loss: %f, acc.: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 2, 5
noise = np.random.normal(0, 1, (r * c, 100))
sampled_labels = np.arange(0, 10).reshape(-1, 1)
gen_imgs = self.generator.predict([noise, sampled_labels])
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt,:,:,0], cmap='gray')
axs[i,j].set_title("Digit: %d" % sampled_labels[cnt])
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/%d.png" % epoch)
plt.close()
if __name__ == '__main__':
cgan = CGAN()
cgan.train(epochs=20000, batch_size=32, sample_interval=200)
================================================
FILE: cgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: cgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: cogan/cogan.py
================================================
from __future__ import print_function, division
import scipy
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import matplotlib.pyplot as plt
import sys
import numpy as np
class COGAN():
"""Reference: https://wiseodd.github.io/techblog/2017/02/18/coupled_gan/"""
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.d1, self.d2 = self.build_discriminators()
self.d1.compile(loss='binary_crossentropy',
optimizer=optimizer,
metrics=['accuracy'])
self.d2.compile(loss='binary_crossentropy',
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.g1, self.g2 = self.build_generators()
# The generator takes noise as input and generated imgs
z = Input(shape=(self.latent_dim,))
img1 = self.g1(z)
img2 = self.g2(z)
# For the combined model we will only train the generators
self.d1.trainable = False
self.d2.trainable = False
# The valid takes generated images as input and determines validity
valid1 = self.d1(img1)
valid2 = self.d2(img2)
# The combined model (stacked generators and discriminators)
# Trains generators to fool discriminators
self.combined = Model(z, [valid1, valid2])
self.combined.compile(loss=['binary_crossentropy', 'binary_crossentropy'],
optimizer=optimizer)
def build_generators(self):
# Shared weights between generators
model = Sequential()
model.add(Dense(256, input_dim=self.latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
noise = Input(shape=(self.latent_dim,))
feature_repr = model(noise)
# Generator 1
g1 = Dense(1024)(feature_repr)
g1 = LeakyReLU(alpha=0.2)(g1)
g1 = BatchNormalization(momentum=0.8)(g1)
g1 = Dense(np.prod(self.img_shape), activation='tanh')(g1)
img1 = Reshape(self.img_shape)(g1)
# Generator 2
g2 = Dense(1024)(feature_repr)
g2 = LeakyReLU(alpha=0.2)(g2)
g2 = BatchNormalization(momentum=0.8)(g2)
g2 = Dense(np.prod(self.img_shape), activation='tanh')(g2)
img2 = Reshape(self.img_shape)(g2)
model.summary()
return Model(noise, img1), Model(noise, img2)
def build_discriminators(self):
img1 = Input(shape=self.img_shape)
img2 = Input(shape=self.img_shape)
# Shared discriminator layers
model = Sequential()
model.add(Flatten(input_shape=self.img_shape))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(256))
model.add(LeakyReLU(alpha=0.2))
img1_embedding = model(img1)
img2_embedding = model(img2)
# Discriminator 1
validity1 = Dense(1, activation='sigmoid')(img1_embedding)
# Discriminator 2
validity2 = Dense(1, activation='sigmoid')(img2_embedding)
return Model(img1, validity1), Model(img2, validity2)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
# Images in domain A and B (rotated)
X1 = X_train[:int(X_train.shape[0]/2)]
X2 = X_train[int(X_train.shape[0]/2):]
X2 = scipy.ndimage.interpolation.rotate(X2, 90, axes=(1, 2))
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ----------------------
# Train Discriminators
# ----------------------
# Select a random batch of images
idx = np.random.randint(0, X1.shape[0], batch_size)
imgs1 = X1[idx]
imgs2 = X2[idx]
# Sample noise as generator input
noise = np.random.normal(0, 1, (batch_size, 100))
# Generate a batch of new images
gen_imgs1 = self.g1.predict(noise)
gen_imgs2 = self.g2.predict(noise)
# Train the discriminators
d1_loss_real = self.d1.train_on_batch(imgs1, valid)
d2_loss_real = self.d2.train_on_batch(imgs2, valid)
d1_loss_fake = self.d1.train_on_batch(gen_imgs1, fake)
d2_loss_fake = self.d2.train_on_batch(gen_imgs2, fake)
d1_loss = 0.5 * np.add(d1_loss_real, d1_loss_fake)
d2_loss = 0.5 * np.add(d2_loss_real, d2_loss_fake)
# ------------------
# Train Generators
# ------------------
g_loss = self.combined.train_on_batch(noise, [valid, valid])
# Plot the progress
print ("%d [D1 loss: %f, acc.: %.2f%%] [D2 loss: %f, acc.: %.2f%%] [G loss: %f]" \
% (epoch, d1_loss[0], 100*d1_loss[1], d2_loss[0], 100*d2_loss[1], g_loss[0]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 4, 4
noise = np.random.normal(0, 1, (r * int(c/2), 100))
gen_imgs1 = self.g1.predict(noise)
gen_imgs2 = self.g2.predict(noise)
gen_imgs = np.concatenate([gen_imgs1, gen_imgs2])
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
if __name__ == '__main__':
gan = COGAN()
gan.train(epochs=30000, batch_size=32, sample_interval=200)
================================================
FILE: cogan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: cogan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: context_encoder/context_encoder.py
================================================
from __future__ import print_function, division
from keras.datasets import cifar10
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, multiply, GaussianNoise
from keras.layers import BatchNormalization, Activation, Embedding, ZeroPadding2D
from keras.layers import MaxPooling2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
from keras import losses
from keras.utils import to_categorical
import keras.backend as K
import matplotlib.pyplot as plt
import numpy as np
class ContextEncoder():
def __init__(self):
self.img_rows = 32
self.img_cols = 32
self.mask_height = 8
self.mask_width = 8
self.channels = 3
self.num_classes = 2
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.missing_shape = (self.mask_height, self.mask_width, self.channels)
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='binary_crossentropy',
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise as input and generates the missing
# part of the image
masked_img = Input(shape=self.img_shape)
gen_missing = self.generator(masked_img)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The discriminator takes generated images as input and determines
# if it is generated or if it is a real image
valid = self.discriminator(gen_missing)
# The combined model (stacked generator and discriminator)
# Trains generator to fool discriminator
self.combined = Model(masked_img , [gen_missing, valid])
self.combined.compile(loss=['mse', 'binary_crossentropy'],
loss_weights=[0.999, 0.001],
optimizer=optimizer)
def build_generator(self):
model = Sequential()
# Encoder
model.add(Conv2D(32, kernel_size=3, strides=2, input_shape=self.img_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(64, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(128, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(512, kernel_size=1, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.5))
# Decoder
model.add(UpSampling2D())
model.add(Conv2D(128, kernel_size=3, padding="same"))
model.add(Activation('relu'))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(64, kernel_size=3, padding="same"))
model.add(Activation('relu'))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(self.channels, kernel_size=3, padding="same"))
model.add(Activation('tanh'))
model.summary()
masked_img = Input(shape=self.img_shape)
gen_missing = model(masked_img)
return Model(masked_img, gen_missing)
def build_discriminator(self):
model = Sequential()
model.add(Conv2D(64, kernel_size=3, strides=2, input_shape=self.missing_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(128, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(256, kernel_size=3, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Flatten())
model.add(Dense(1, activation='sigmoid'))
model.summary()
img = Input(shape=self.missing_shape)
validity = model(img)
return Model(img, validity)
def mask_randomly(self, imgs):
y1 = np.random.randint(0, self.img_rows - self.mask_height, imgs.shape[0])
y2 = y1 + self.mask_height
x1 = np.random.randint(0, self.img_rows - self.mask_width, imgs.shape[0])
x2 = x1 + self.mask_width
masked_imgs = np.empty_like(imgs)
missing_parts = np.empty((imgs.shape[0], self.mask_height, self.mask_width, self.channels))
for i, img in enumerate(imgs):
masked_img = img.copy()
_y1, _y2, _x1, _x2 = y1[i], y2[i], x1[i], x2[i]
missing_parts[i] = masked_img[_y1:_y2, _x1:_x2, :].copy()
masked_img[_y1:_y2, _x1:_x2, :] = 0
masked_imgs[i] = masked_img
return masked_imgs, missing_parts, (y1, y2, x1, x2)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, y_train), (_, _) = cifar10.load_data()
# Extract dogs and cats
X_cats = X_train[(y_train == 3).flatten()]
X_dogs = X_train[(y_train == 5).flatten()]
X_train = np.vstack((X_cats, X_dogs))
# Rescale -1 to 1
X_train = X_train / 127.5 - 1.
y_train = y_train.reshape(-1, 1)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
masked_imgs, missing_parts, _ = self.mask_randomly(imgs)
# Generate a batch of new images
gen_missing = self.generator.predict(masked_imgs)
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch(missing_parts, valid)
d_loss_fake = self.discriminator.train_on_batch(gen_missing, fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
g_loss = self.combined.train_on_batch(masked_imgs, [missing_parts, valid])
# Plot the progress
print ("%d [D loss: %f, acc: %.2f%%] [G loss: %f, mse: %f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss[0], g_loss[1]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
idx = np.random.randint(0, X_train.shape[0], 6)
imgs = X_train[idx]
self.sample_images(epoch, imgs)
def sample_images(self, epoch, imgs):
r, c = 3, 6
masked_imgs, missing_parts, (y1, y2, x1, x2) = self.mask_randomly(imgs)
gen_missing = self.generator.predict(masked_imgs)
imgs = 0.5 * imgs + 0.5
masked_imgs = 0.5 * masked_imgs + 0.5
gen_missing = 0.5 * gen_missing + 0.5
fig, axs = plt.subplots(r, c)
for i in range(c):
axs[0,i].imshow(imgs[i, :,:])
axs[0,i].axis('off')
axs[1,i].imshow(masked_imgs[i, :,:])
axs[1,i].axis('off')
filled_in = imgs[i].copy()
filled_in[y1[i]:y2[i], x1[i]:x2[i], :] = gen_missing[i]
axs[2,i].imshow(filled_in)
axs[2,i].axis('off')
fig.savefig("images/%d.png" % epoch)
plt.close()
def save_model(self):
def save(model, model_name):
model_path = "saved_model/%s.json" % model_name
weights_path = "saved_model/%s_weights.hdf5" % model_name
options = {"file_arch": model_path,
"file_weight": weights_path}
json_string = model.to_json()
open(options['file_arch'], 'w').write(json_string)
model.save_weights(options['file_weight'])
save(self.generator, "generator")
save(self.discriminator, "discriminator")
if __name__ == '__main__':
context_encoder = ContextEncoder()
context_encoder.train(epochs=30000, batch_size=64, sample_interval=50)
================================================
FILE: context_encoder/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: context_encoder/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: cyclegan/cyclegan.py
================================================
from __future__ import print_function, division
import scipy
from keras.datasets import mnist
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, Concatenate
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import datetime
import matplotlib.pyplot as plt
import sys
from data_loader import DataLoader
import numpy as np
import os
class CycleGAN():
def __init__(self):
# Input shape
self.img_rows = 128
self.img_cols = 128
self.channels = 3
self.img_shape = (self.img_rows, self.img_cols, self.channels)
# Configure data loader
self.dataset_name = 'apple2orange'
self.data_loader = DataLoader(dataset_name=self.dataset_name,
img_res=(self.img_rows, self.img_cols))
# Calculate output shape of D (PatchGAN)
patch = int(self.img_rows / 2**4)
self.disc_patch = (patch, patch, 1)
# Number of filters in the first layer of G and D
self.gf = 32
self.df = 64
# Loss weights
self.lambda_cycle = 10.0 # Cycle-consistency loss
self.lambda_id = 0.1 * self.lambda_cycle # Identity loss
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminators
self.d_A = self.build_discriminator()
self.d_B = self.build_discriminator()
self.d_A.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
self.d_B.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
#-------------------------
# Construct Computational
# Graph of Generators
#-------------------------
# Build the generators
self.g_AB = self.build_generator()
self.g_BA = self.build_generator()
# Input images from both domains
img_A = Input(shape=self.img_shape)
img_B = Input(shape=self.img_shape)
# Translate images to the other domain
fake_B = self.g_AB(img_A)
fake_A = self.g_BA(img_B)
# Translate images back to original domain
reconstr_A = self.g_BA(fake_B)
reconstr_B = self.g_AB(fake_A)
# Identity mapping of images
img_A_id = self.g_BA(img_A)
img_B_id = self.g_AB(img_B)
# For the combined model we will only train the generators
self.d_A.trainable = False
self.d_B.trainable = False
# Discriminators determines validity of translated images
valid_A = self.d_A(fake_A)
valid_B = self.d_B(fake_B)
# Combined model trains generators to fool discriminators
self.combined = Model(inputs=[img_A, img_B],
outputs=[ valid_A, valid_B,
reconstr_A, reconstr_B,
img_A_id, img_B_id ])
self.combined.compile(loss=['mse', 'mse',
'mae', 'mae',
'mae', 'mae'],
loss_weights=[ 1, 1,
self.lambda_cycle, self.lambda_cycle,
self.lambda_id, self.lambda_id ],
optimizer=optimizer)
def build_generator(self):
"""U-Net Generator"""
def conv2d(layer_input, filters, f_size=4):
"""Layers used during downsampling"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
d = InstanceNormalization()(d)
return d
def deconv2d(layer_input, skip_input, filters, f_size=4, dropout_rate=0):
"""Layers used during upsampling"""
u = UpSampling2D(size=2)(layer_input)
u = Conv2D(filters, kernel_size=f_size, strides=1, padding='same', activation='relu')(u)
if dropout_rate:
u = Dropout(dropout_rate)(u)
u = InstanceNormalization()(u)
u = Concatenate()([u, skip_input])
return u
# Image input
d0 = Input(shape=self.img_shape)
# Downsampling
d1 = conv2d(d0, self.gf)
d2 = conv2d(d1, self.gf*2)
d3 = conv2d(d2, self.gf*4)
d4 = conv2d(d3, self.gf*8)
# Upsampling
u1 = deconv2d(d4, d3, self.gf*4)
u2 = deconv2d(u1, d2, self.gf*2)
u3 = deconv2d(u2, d1, self.gf)
u4 = UpSampling2D(size=2)(u3)
output_img = Conv2D(self.channels, kernel_size=4, strides=1, padding='same', activation='tanh')(u4)
return Model(d0, output_img)
def build_discriminator(self):
def d_layer(layer_input, filters, f_size=4, normalization=True):
"""Discriminator layer"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if normalization:
d = InstanceNormalization()(d)
return d
img = Input(shape=self.img_shape)
d1 = d_layer(img, self.df, normalization=False)
d2 = d_layer(d1, self.df*2)
d3 = d_layer(d2, self.df*4)
d4 = d_layer(d3, self.df*8)
validity = Conv2D(1, kernel_size=4, strides=1, padding='same')(d4)
return Model(img, validity)
def train(self, epochs, batch_size=1, sample_interval=50):
start_time = datetime.datetime.now()
# Adversarial loss ground truths
valid = np.ones((batch_size,) + self.disc_patch)
fake = np.zeros((batch_size,) + self.disc_patch)
for epoch in range(epochs):
for batch_i, (imgs_A, imgs_B) in enumerate(self.data_loader.load_batch(batch_size)):
# ----------------------
# Train Discriminators
# ----------------------
# Translate images to opposite domain
fake_B = self.g_AB.predict(imgs_A)
fake_A = self.g_BA.predict(imgs_B)
# Train the discriminators (original images = real / translated = Fake)
dA_loss_real = self.d_A.train_on_batch(imgs_A, valid)
dA_loss_fake = self.d_A.train_on_batch(fake_A, fake)
dA_loss = 0.5 * np.add(dA_loss_real, dA_loss_fake)
dB_loss_real = self.d_B.train_on_batch(imgs_B, valid)
dB_loss_fake = self.d_B.train_on_batch(fake_B, fake)
dB_loss = 0.5 * np.add(dB_loss_real, dB_loss_fake)
# Total disciminator loss
d_loss = 0.5 * np.add(dA_loss, dB_loss)
# ------------------
# Train Generators
# ------------------
# Train the generators
g_loss = self.combined.train_on_batch([imgs_A, imgs_B],
[valid, valid,
imgs_A, imgs_B,
imgs_A, imgs_B])
elapsed_time = datetime.datetime.now() - start_time
# Plot the progress
print ("[Epoch %d/%d] [Batch %d/%d] [D loss: %f, acc: %3d%%] [G loss: %05f, adv: %05f, recon: %05f, id: %05f] time: %s " \
% ( epoch, epochs,
batch_i, self.data_loader.n_batches,
d_loss[0], 100*d_loss[1],
g_loss[0],
np.mean(g_loss[1:3]),
np.mean(g_loss[3:5]),
np.mean(g_loss[5:6]),
elapsed_time))
# If at save interval => save generated image samples
if batch_i % sample_interval == 0:
self.sample_images(epoch, batch_i)
def sample_images(self, epoch, batch_i):
os.makedirs('images/%s' % self.dataset_name, exist_ok=True)
r, c = 2, 3
imgs_A = self.data_loader.load_data(domain="A", batch_size=1, is_testing=True)
imgs_B = self.data_loader.load_data(domain="B", batch_size=1, is_testing=True)
# Demo (for GIF)
#imgs_A = self.data_loader.load_img('datasets/apple2orange/testA/n07740461_1541.jpg')
#imgs_B = self.data_loader.load_img('datasets/apple2orange/testB/n07749192_4241.jpg')
# Translate images to the other domain
fake_B = self.g_AB.predict(imgs_A)
fake_A = self.g_BA.predict(imgs_B)
# Translate back to original domain
reconstr_A = self.g_BA.predict(fake_B)
reconstr_B = self.g_AB.predict(fake_A)
gen_imgs = np.concatenate([imgs_A, fake_B, reconstr_A, imgs_B, fake_A, reconstr_B])
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
titles = ['Original', 'Translated', 'Reconstructed']
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt])
axs[i, j].set_title(titles[j])
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/%s/%d_%d.png" % (self.dataset_name, epoch, batch_i))
plt.close()
if __name__ == '__main__':
gan = CycleGAN()
gan.train(epochs=200, batch_size=1, sample_interval=200)
================================================
FILE: cyclegan/data_loader.py
================================================
import scipy
from glob import glob
import numpy as np
class DataLoader():
def __init__(self, dataset_name, img_res=(128, 128)):
self.dataset_name = dataset_name
self.img_res = img_res
def load_data(self, domain, batch_size=1, is_testing=False):
data_type = "train%s" % domain if not is_testing else "test%s" % domain
path = glob('./datasets/%s/%s/*' % (self.dataset_name, data_type))
batch_images = np.random.choice(path, size=batch_size)
imgs = []
for img_path in batch_images:
img = self.imread(img_path)
if not is_testing:
img = scipy.misc.imresize(img, self.img_res)
if np.random.random() > 0.5:
img = np.fliplr(img)
else:
img = scipy.misc.imresize(img, self.img_res)
imgs.append(img)
imgs = np.array(imgs)/127.5 - 1.
return imgs
def load_batch(self, batch_size=1, is_testing=False):
data_type = "train" if not is_testing else "val"
path_A = glob('./datasets/%s/%sA/*' % (self.dataset_name, data_type))
path_B = glob('./datasets/%s/%sB/*' % (self.dataset_name, data_type))
self.n_batches = int(min(len(path_A), len(path_B)) / batch_size)
total_samples = self.n_batches * batch_size
# Sample n_batches * batch_size from each path list so that model sees all
# samples from both domains
path_A = np.random.choice(path_A, total_samples, replace=False)
path_B = np.random.choice(path_B, total_samples, replace=False)
for i in range(self.n_batches-1):
batch_A = path_A[i*batch_size:(i+1)*batch_size]
batch_B = path_B[i*batch_size:(i+1)*batch_size]
imgs_A, imgs_B = [], []
for img_A, img_B in zip(batch_A, batch_B):
img_A = self.imread(img_A)
img_B = self.imread(img_B)
img_A = scipy.misc.imresize(img_A, self.img_res)
img_B = scipy.misc.imresize(img_B, self.img_res)
if not is_testing and np.random.random() > 0.5:
img_A = np.fliplr(img_A)
img_B = np.fliplr(img_B)
imgs_A.append(img_A)
imgs_B.append(img_B)
imgs_A = np.array(imgs_A)/127.5 - 1.
imgs_B = np.array(imgs_B)/127.5 - 1.
yield imgs_A, imgs_B
def load_img(self, path):
img = self.imread(path)
img = scipy.misc.imresize(img, self.img_res)
img = img/127.5 - 1.
return img[np.newaxis, :, :, :]
def imread(self, path):
return scipy.misc.imread(path, mode='RGB').astype(np.float)
================================================
FILE: cyclegan/download_dataset.sh
================================================
mkdir datasets
FILE=$1
if [[ $FILE != "ae_photos" && $FILE != "apple2orange" && $FILE != "summer2winter_yosemite" && $FILE != "horse2zebra" && $FILE != "monet2photo" && $FILE != "cezanne2photo" && $FILE != "ukiyoe2photo" && $FILE != "vangogh2photo" && $FILE != "maps" && $FILE != "cityscapes" && $FILE != "facades" && $FILE != "iphone2dslr_flower" && $FILE != "ae_photos" ]]; then
echo "Available datasets are: apple2orange, summer2winter_yosemite, horse2zebra, monet2photo, cezanne2photo, ukiyoe2photo, vangogh2photo, maps, cityscapes, facades, iphone2dslr_flower, ae_photos"
exit 1
fi
URL=https://people.eecs.berkeley.edu/~taesung_park/CycleGAN/datasets/$FILE.zip
ZIP_FILE=./datasets/$FILE.zip
TARGET_DIR=./datasets/$FILE/
wget -N $URL -O $ZIP_FILE
mkdir $TARGET_DIR
unzip $ZIP_FILE -d ./datasets/
rm $ZIP_FILE
================================================
FILE: cyclegan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: cyclegan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: dcgan/dcgan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import matplotlib.pyplot as plt
import sys
import numpy as np
class DCGAN():
def __init__(self):
# Input shape
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='binary_crossentropy',
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise as input and generates imgs
z = Input(shape=(self.latent_dim,))
img = self.generator(z)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The discriminator takes generated images as input and determines validity
valid = self.discriminator(img)
# The combined model (stacked generator and discriminator)
# Trains the generator to fool the discriminator
self.combined = Model(z, valid)
self.combined.compile(loss='binary_crossentropy', optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(128 * 7 * 7, activation="relu", input_dim=self.latent_dim))
model.add(Reshape((7, 7, 128)))
model.add(UpSampling2D())
model.add(Conv2D(128, kernel_size=3, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(Activation("relu"))
model.add(UpSampling2D())
model.add(Conv2D(64, kernel_size=3, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(Activation("relu"))
model.add(Conv2D(self.channels, kernel_size=3, padding="same"))
model.add(Activation("tanh"))
model.summary()
noise = Input(shape=(self.latent_dim,))
img = model(noise)
return Model(noise, img)
def build_discriminator(self):
model = Sequential()
model.add(Conv2D(32, kernel_size=3, strides=2, input_shape=self.img_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(64, kernel_size=3, strides=2, padding="same"))
model.add(ZeroPadding2D(padding=((0,1),(0,1))))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(128, kernel_size=3, strides=2, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(256, kernel_size=3, strides=1, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Flatten())
model.add(Dense(1, activation='sigmoid'))
model.summary()
img = Input(shape=self.img_shape)
validity = model(img)
return Model(img, validity)
def train(self, epochs, batch_size=128, save_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = X_train / 127.5 - 1.
X_train = np.expand_dims(X_train, axis=3)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random half of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
# Sample noise and generate a batch of new images
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# Train the discriminator (real classified as ones and generated as zeros)
d_loss_real = self.discriminator.train_on_batch(imgs, valid)
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
# Train the generator (wants discriminator to mistake images as real)
g_loss = self.combined.train_on_batch(noise, valid)
# Plot the progress
print ("%d [D loss: %f, acc.: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss))
# If at save interval => save generated image samples
if epoch % save_interval == 0:
self.save_imgs(epoch)
def save_imgs(self, epoch):
r, c = 5, 5
noise = np.random.normal(0, 1, (r * c, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
if __name__ == '__main__':
dcgan = DCGAN()
dcgan.train(epochs=4000, batch_size=32, save_interval=50)
================================================
FILE: dcgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: dcgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: discogan/data_loader.py
================================================
import scipy
from glob import glob
import numpy as np
class DataLoader():
def __init__(self, dataset_name, img_res=(128, 128)):
self.dataset_name = dataset_name
self.img_res = img_res
def load_data(self, batch_size=1, is_testing=False):
data_type = "train" if not is_testing else "val"
path = glob('./datasets/%s/%s/*' % (self.dataset_name, data_type))
batch = np.random.choice(path, size=batch_size)
imgs_A, imgs_B = [], []
for img in batch:
img = self.imread(img)
h, w, _ = img.shape
half_w = int(w/2)
img_A = img[:, :half_w, :]
img_B = img[:, half_w:, :]
img_A = scipy.misc.imresize(img_A, self.img_res)
img_B = scipy.misc.imresize(img_B, self.img_res)
if not is_testing and np.random.random() > 0.5:
img_A = np.fliplr(img_A)
img_B = np.fliplr(img_B)
imgs_A.append(img_A)
imgs_B.append(img_B)
imgs_A = np.array(imgs_A)/127.5 - 1.
imgs_B = np.array(imgs_B)/127.5 - 1.
return imgs_A, imgs_B
def load_batch(self, batch_size=1, is_testing=False):
data_type = "train" if not is_testing else "val"
path = glob('./datasets/%s/%s/*' % (self.dataset_name, data_type))
self.n_batches = int(len(path) / batch_size)
for i in range(self.n_batches-1):
batch = path[i*batch_size:(i+1)*batch_size]
imgs_A, imgs_B = [], []
for img in batch:
img = self.imread(img)
h, w, _ = img.shape
half_w = int(w/2)
img_A = img[:, :half_w, :]
img_B = img[:, half_w:, :]
img_A = scipy.misc.imresize(img_A, self.img_res)
img_B = scipy.misc.imresize(img_B, self.img_res)
if not is_testing and np.random.random() > 0.5:
img_A = np.fliplr(img_A)
img_B = np.fliplr(img_B)
imgs_A.append(img_A)
imgs_B.append(img_B)
imgs_A = np.array(imgs_A)/127.5 - 1.
imgs_B = np.array(imgs_B)/127.5 - 1.
yield imgs_A, imgs_B
def load_img(self, path):
img = self.imread(path)
img = scipy.misc.imresize(img, self.img_res)
img = img/127.5 - 1.
return img[np.newaxis, :, :, :]
def imread(self, path):
return scipy.misc.imread(path, mode='RGB').astype(np.float)
================================================
FILE: discogan/discogan.py
================================================
from __future__ import print_function, division
import scipy
from keras.datasets import mnist
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, Concatenate
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import datetime
import matplotlib.pyplot as plt
import sys
from data_loader import DataLoader
import numpy as np
import os
class DiscoGAN():
def __init__(self):
# Input shape
self.img_rows = 128
self.img_cols = 128
self.channels = 3
self.img_shape = (self.img_rows, self.img_cols, self.channels)
# Configure data loader
self.dataset_name = 'edges2shoes'
self.data_loader = DataLoader(dataset_name=self.dataset_name,
img_res=(self.img_rows, self.img_cols))
# Calculate output shape of D (PatchGAN)
patch = int(self.img_rows / 2**4)
self.disc_patch = (patch, patch, 1)
# Number of filters in the first layer of G and D
self.gf = 64
self.df = 64
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminators
self.d_A = self.build_discriminator()
self.d_B = self.build_discriminator()
self.d_A.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
self.d_B.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
#-------------------------
# Construct Computational
# Graph of Generators
#-------------------------
# Build the generators
self.g_AB = self.build_generator()
self.g_BA = self.build_generator()
# Input images from both domains
img_A = Input(shape=self.img_shape)
img_B = Input(shape=self.img_shape)
# Translate images to the other domain
fake_B = self.g_AB(img_A)
fake_A = self.g_BA(img_B)
# Translate images back to original domain
reconstr_A = self.g_BA(fake_B)
reconstr_B = self.g_AB(fake_A)
# For the combined model we will only train the generators
self.d_A.trainable = False
self.d_B.trainable = False
# Discriminators determines validity of translated images
valid_A = self.d_A(fake_A)
valid_B = self.d_B(fake_B)
# Objectives
# + Adversarial: Fool domain discriminators
# + Translation: Minimize MAE between e.g. fake B and true B
# + Cycle-consistency: Minimize MAE between reconstructed images and original
self.combined = Model(inputs=[img_A, img_B],
outputs=[ valid_A, valid_B,
fake_B, fake_A,
reconstr_A, reconstr_B ])
self.combined.compile(loss=['mse', 'mse',
'mae', 'mae',
'mae', 'mae'],
optimizer=optimizer)
def build_generator(self):
"""U-Net Generator"""
def conv2d(layer_input, filters, f_size=4, normalize=True):
"""Layers used during downsampling"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if normalize:
d = InstanceNormalization()(d)
return d
def deconv2d(layer_input, skip_input, filters, f_size=4, dropout_rate=0):
"""Layers used during upsampling"""
u = UpSampling2D(size=2)(layer_input)
u = Conv2D(filters, kernel_size=f_size, strides=1, padding='same', activation='relu')(u)
if dropout_rate:
u = Dropout(dropout_rate)(u)
u = InstanceNormalization()(u)
u = Concatenate()([u, skip_input])
return u
# Image input
d0 = Input(shape=self.img_shape)
# Downsampling
d1 = conv2d(d0, self.gf, normalize=False)
d2 = conv2d(d1, self.gf*2)
d3 = conv2d(d2, self.gf*4)
d4 = conv2d(d3, self.gf*8)
d5 = conv2d(d4, self.gf*8)
d6 = conv2d(d5, self.gf*8)
d7 = conv2d(d6, self.gf*8)
# Upsampling
u1 = deconv2d(d7, d6, self.gf*8)
u2 = deconv2d(u1, d5, self.gf*8)
u3 = deconv2d(u2, d4, self.gf*8)
u4 = deconv2d(u3, d3, self.gf*4)
u5 = deconv2d(u4, d2, self.gf*2)
u6 = deconv2d(u5, d1, self.gf)
u7 = UpSampling2D(size=2)(u6)
output_img = Conv2D(self.channels, kernel_size=4, strides=1,
padding='same', activation='tanh')(u7)
return Model(d0, output_img)
def build_discriminator(self):
def d_layer(layer_input, filters, f_size=4, normalization=True):
"""Discriminator layer"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if normalization:
d = InstanceNormalization()(d)
return d
img = Input(shape=self.img_shape)
d1 = d_layer(img, self.df, normalization=False)
d2 = d_layer(d1, self.df*2)
d3 = d_layer(d2, self.df*4)
d4 = d_layer(d3, self.df*8)
validity = Conv2D(1, kernel_size=4, strides=1, padding='same')(d4)
return Model(img, validity)
def train(self, epochs, batch_size=128, sample_interval=50):
start_time = datetime.datetime.now()
# Adversarial loss ground truths
valid = np.ones((batch_size,) + self.disc_patch)
fake = np.zeros((batch_size,) + self.disc_patch)
for epoch in range(epochs):
for batch_i, (imgs_A, imgs_B) in enumerate(self.data_loader.load_batch(batch_size)):
# ----------------------
# Train Discriminators
# ----------------------
# Translate images to opposite domain
fake_B = self.g_AB.predict(imgs_A)
fake_A = self.g_BA.predict(imgs_B)
# Train the discriminators (original images = real / translated = Fake)
dA_loss_real = self.d_A.train_on_batch(imgs_A, valid)
dA_loss_fake = self.d_A.train_on_batch(fake_A, fake)
dA_loss = 0.5 * np.add(dA_loss_real, dA_loss_fake)
dB_loss_real = self.d_B.train_on_batch(imgs_B, valid)
dB_loss_fake = self.d_B.train_on_batch(fake_B, fake)
dB_loss = 0.5 * np.add(dB_loss_real, dB_loss_fake)
# Total disciminator loss
d_loss = 0.5 * np.add(dA_loss, dB_loss)
# ------------------
# Train Generators
# ------------------
# Train the generators
g_loss = self.combined.train_on_batch([imgs_A, imgs_B], [valid, valid, \
imgs_B, imgs_A, \
imgs_A, imgs_B])
elapsed_time = datetime.datetime.now() - start_time
# Plot the progress
print ("[%d] [%d/%d] time: %s, [d_loss: %f, g_loss: %f]" % (epoch, batch_i,
self.data_loader.n_batches,
elapsed_time,
d_loss[0], g_loss[0]))
# If at save interval => save generated image samples
if batch_i % sample_interval == 0:
self.sample_images(epoch, batch_i)
def sample_images(self, epoch, batch_i):
os.makedirs('images/%s' % self.dataset_name, exist_ok=True)
r, c = 2, 3
imgs_A, imgs_B = self.data_loader.load_data(batch_size=1, is_testing=True)
# Translate images to the other domain
fake_B = self.g_AB.predict(imgs_A)
fake_A = self.g_BA.predict(imgs_B)
# Translate back to original domain
reconstr_A = self.g_BA.predict(fake_B)
reconstr_B = self.g_AB.predict(fake_A)
gen_imgs = np.concatenate([imgs_A, fake_B, reconstr_A, imgs_B, fake_A, reconstr_B])
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
titles = ['Original', 'Translated', 'Reconstructed']
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt])
axs[i, j].set_title(titles[j])
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/%s/%d_%d.png" % (self.dataset_name, epoch, batch_i))
plt.close()
if __name__ == '__main__':
gan = DiscoGAN()
gan.train(epochs=20, batch_size=1, sample_interval=200)
================================================
FILE: discogan/download_dataset.sh
================================================
mkdir datasets
FILE=$1
URL=https://people.eecs.berkeley.edu/~tinghuiz/projects/pix2pix/datasets/$FILE.tar.gz
TAR_FILE=./datasets/$FILE.tar.gz
TARGET_DIR=./datasets/$FILE/
wget -N $URL -O $TAR_FILE
mkdir $TARGET_DIR
tar -zxvf $TAR_FILE -C ./datasets/
rm $TAR_FILE
================================================
FILE: discogan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: discogan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: dualgan/dualgan.py
================================================
from __future__ import print_function, division
import scipy
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, Concatenate
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import RMSprop, Adam
from keras.utils import to_categorical
import keras.backend as K
import matplotlib.pyplot as plt
import sys
import numpy as np
class DUALGAN():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_dim = self.img_rows*self.img_cols
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminators
self.D_A = self.build_discriminator()
self.D_A.compile(loss=self.wasserstein_loss,
optimizer=optimizer,
metrics=['accuracy'])
self.D_B = self.build_discriminator()
self.D_B.compile(loss=self.wasserstein_loss,
optimizer=optimizer,
metrics=['accuracy'])
#-------------------------
# Construct Computational
# Graph of Generators
#-------------------------
# Build the generators
self.G_AB = self.build_generator()
self.G_BA = self.build_generator()
# For the combined model we will only train the generators
self.D_A.trainable = False
self.D_B.trainable = False
# The generator takes images from their respective domains as inputs
imgs_A = Input(shape=(self.img_dim,))
imgs_B = Input(shape=(self.img_dim,))
# Generators translates the images to the opposite domain
fake_B = self.G_AB(imgs_A)
fake_A = self.G_BA(imgs_B)
# The discriminators determines validity of translated images
valid_A = self.D_A(fake_A)
valid_B = self.D_B(fake_B)
# Generators translate the images back to their original domain
recov_A = self.G_BA(fake_B)
recov_B = self.G_AB(fake_A)
# The combined model (stacked generators and discriminators)
self.combined = Model(inputs=[imgs_A, imgs_B], outputs=[valid_A, valid_B, recov_A, recov_B])
self.combined.compile(loss=[self.wasserstein_loss, self.wasserstein_loss, 'mae', 'mae'],
optimizer=optimizer,
loss_weights=[1, 1, 100, 100])
def build_generator(self):
X = Input(shape=(self.img_dim,))
model = Sequential()
model.add(Dense(256, input_dim=self.img_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dropout(0.4))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dropout(0.4))
model.add(Dense(1024))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dropout(0.4))
model.add(Dense(self.img_dim, activation='tanh'))
X_translated = model(X)
return Model(X, X_translated)
def build_discriminator(self):
img = Input(shape=(self.img_dim,))
model = Sequential()
model.add(Dense(512, input_dim=self.img_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(256))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(1))
validity = model(img)
return Model(img, validity)
def sample_generator_input(self, X, batch_size):
# Sample random batch of images from X
idx = np.random.randint(0, X.shape[0], batch_size)
return X[idx]
def wasserstein_loss(self, y_true, y_pred):
return K.mean(y_true * y_pred)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
# Domain A and B (rotated)
X_A = X_train[:int(X_train.shape[0]/2)]
X_B = scipy.ndimage.interpolation.rotate(X_train[int(X_train.shape[0]/2):], 90, axes=(1, 2))
X_A = X_A.reshape(X_A.shape[0], self.img_dim)
X_B = X_B.reshape(X_B.shape[0], self.img_dim)
clip_value = 0.01
n_critic = 4
# Adversarial ground truths
valid = -np.ones((batch_size, 1))
fake = np.ones((batch_size, 1))
for epoch in range(epochs):
# Train the discriminator for n_critic iterations
for _ in range(n_critic):
# ----------------------
# Train Discriminators
# ----------------------
# Sample generator inputs
imgs_A = self.sample_generator_input(X_A, batch_size)
imgs_B = self.sample_generator_input(X_B, batch_size)
# Translate images to their opposite domain
fake_B = self.G_AB.predict(imgs_A)
fake_A = self.G_BA.predict(imgs_B)
# Train the discriminators
D_A_loss_real = self.D_A.train_on_batch(imgs_A, valid)
D_A_loss_fake = self.D_A.train_on_batch(fake_A, fake)
D_B_loss_real = self.D_B.train_on_batch(imgs_B, valid)
D_B_loss_fake = self.D_B.train_on_batch(fake_B, fake)
D_A_loss = 0.5 * np.add(D_A_loss_real, D_A_loss_fake)
D_B_loss = 0.5 * np.add(D_B_loss_real, D_B_loss_fake)
# Clip discriminator weights
for d in [self.D_A, self.D_B]:
for l in d.layers:
weights = l.get_weights()
weights = [np.clip(w, -clip_value, clip_value) for w in weights]
l.set_weights(weights)
# ------------------
# Train Generators
# ------------------
# Train the generators
g_loss = self.combined.train_on_batch([imgs_A, imgs_B], [valid, valid, imgs_A, imgs_B])
# Plot the progress
print ("%d [D1 loss: %f] [D2 loss: %f] [G loss: %f]" \
% (epoch, D_A_loss[0], D_B_loss[0], g_loss[0]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.save_imgs(epoch, X_A, X_B)
def save_imgs(self, epoch, X_A, X_B):
r, c = 4, 4
# Sample generator inputs
imgs_A = self.sample_generator_input(X_A, c)
imgs_B = self.sample_generator_input(X_B, c)
# Images translated to their opposite domain
fake_B = self.G_AB.predict(imgs_A)
fake_A = self.G_BA.predict(imgs_B)
gen_imgs = np.concatenate([imgs_A, fake_B, imgs_B, fake_A])
gen_imgs = gen_imgs.reshape((r, c, self.img_rows, self.img_cols, 1))
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[i, j, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
if __name__ == '__main__':
gan = DUALGAN()
gan.train(epochs=30000, batch_size=32, sample_interval=200)
================================================
FILE: dualgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: dualgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: gan/gan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import matplotlib.pyplot as plt
import sys
import numpy as np
class GAN():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='binary_crossentropy',
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise as input and generates imgs
z = Input(shape=(self.latent_dim,))
img = self.generator(z)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The discriminator takes generated images as input and determines validity
validity = self.discriminator(img)
# The combined model (stacked generator and discriminator)
# Trains the generator to fool the discriminator
self.combined = Model(z, validity)
self.combined.compile(loss='binary_crossentropy', optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(256, input_dim=self.latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(1024))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(np.prod(self.img_shape), activation='tanh'))
model.add(Reshape(self.img_shape))
model.summary()
noise = Input(shape=(self.latent_dim,))
img = model(noise)
return Model(noise, img)
def build_discriminator(self):
model = Sequential()
model.add(Flatten(input_shape=self.img_shape))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(256))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(1, activation='sigmoid'))
model.summary()
img = Input(shape=self.img_shape)
validity = model(img)
return Model(img, validity)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = X_train / 127.5 - 1.
X_train = np.expand_dims(X_train, axis=3)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
# Generate a batch of new images
gen_imgs = self.generator.predict(noise)
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch(imgs, valid)
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
# Train the generator (to have the discriminator label samples as valid)
g_loss = self.combined.train_on_batch(noise, valid)
# Plot the progress
print ("%d [D loss: %f, acc.: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 5, 5
noise = np.random.normal(0, 1, (r * c, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/%d.png" % epoch)
plt.close()
if __name__ == '__main__':
gan = GAN()
gan.train(epochs=30000, batch_size=32, sample_interval=200)
================================================
FILE: gan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: gan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: infogan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: infogan/infogan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, multiply, concatenate
from keras.layers import BatchNormalization, Activation, Embedding, ZeroPadding2D, Lambda
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
from keras.utils import to_categorical
import keras.backend as K
import matplotlib.pyplot as plt
import numpy as np
class INFOGAN():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.num_classes = 10
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 72
optimizer = Adam(0.0002, 0.5)
losses = ['binary_crossentropy', self.mutual_info_loss]
# Build and the discriminator and recognition network
self.discriminator, self.auxilliary = self.build_disk_and_q_net()
self.discriminator.compile(loss=['binary_crossentropy'],
optimizer=optimizer,
metrics=['accuracy'])
# Build and compile the recognition network Q
self.auxilliary.compile(loss=[self.mutual_info_loss],
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise and the target label as input
# and generates the corresponding digit of that label
gen_input = Input(shape=(self.latent_dim,))
img = self.generator(gen_input)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The discriminator takes generated image as input and determines validity
valid = self.discriminator(img)
# The recognition network produces the label
target_label = self.auxilliary(img)
# The combined model (stacked generator and discriminator)
self.combined = Model(gen_input, [valid, target_label])
self.combined.compile(loss=losses,
optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(128 * 7 * 7, activation="relu", input_dim=self.latent_dim))
model.add(Reshape((7, 7, 128)))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(128, kernel_size=3, padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(64, kernel_size=3, padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(self.channels, kernel_size=3, padding='same'))
model.add(Activation("tanh"))
gen_input = Input(shape=(self.latent_dim,))
img = model(gen_input)
model.summary()
return Model(gen_input, img)
def build_disk_and_q_net(self):
img = Input(shape=self.img_shape)
# Shared layers between discriminator and recognition network
model = Sequential()
model.add(Conv2D(64, kernel_size=3, strides=2, input_shape=self.img_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(128, kernel_size=3, strides=2, padding="same"))
model.add(ZeroPadding2D(padding=((0,1),(0,1))))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(256, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(512, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Flatten())
img_embedding = model(img)
# Discriminator
validity = Dense(1, activation='sigmoid')(img_embedding)
# Recognition
q_net = Dense(128, activation='relu')(img_embedding)
label = Dense(self.num_classes, activation='softmax')(q_net)
# Return discriminator and recognition network
return Model(img, validity), Model(img, label)
def mutual_info_loss(self, c, c_given_x):
"""The mutual information metric we aim to minimize"""
eps = 1e-8
conditional_entropy = K.mean(- K.sum(K.log(c_given_x + eps) * c, axis=1))
entropy = K.mean(- K.sum(K.log(c + eps) * c, axis=1))
return conditional_entropy + entropy
def sample_generator_input(self, batch_size):
# Generator inputs
sampled_noise = np.random.normal(0, 1, (batch_size, 62))
sampled_labels = np.random.randint(0, self.num_classes, batch_size).reshape(-1, 1)
sampled_labels = to_categorical(sampled_labels, num_classes=self.num_classes)
return sampled_noise, sampled_labels
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, y_train), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
y_train = y_train.reshape(-1, 1)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random half batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
# Sample noise and categorical labels
sampled_noise, sampled_labels = self.sample_generator_input(batch_size)
gen_input = np.concatenate((sampled_noise, sampled_labels), axis=1)
# Generate a half batch of new images
gen_imgs = self.generator.predict(gen_input)
# Train on real and generated data
d_loss_real = self.discriminator.train_on_batch(imgs, valid)
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, fake)
# Avg. loss
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator and Q-network
# ---------------------
g_loss = self.combined.train_on_batch(gen_input, [valid, sampled_labels])
# Plot the progress
print ("%d [D loss: %.2f, acc.: %.2f%%] [Q loss: %.2f] [G loss: %.2f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss[1], g_loss[2]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 10, 10
fig, axs = plt.subplots(r, c)
for i in range(c):
sampled_noise, _ = self.sample_generator_input(c)
label = to_categorical(np.full(fill_value=i, shape=(r,1)), num_classes=self.num_classes)
gen_input = np.concatenate((sampled_noise, label), axis=1)
gen_imgs = self.generator.predict(gen_input)
gen_imgs = 0.5 * gen_imgs + 0.5
for j in range(r):
axs[j,i].imshow(gen_imgs[j,:,:,0], cmap='gray')
axs[j,i].axis('off')
fig.savefig("images/%d.png" % epoch)
plt.close()
def save_model(self):
def save(model, model_name):
model_path = "saved_model/%s.json" % model_name
weights_path = "saved_model/%s_weights.hdf5" % model_name
options = {"file_arch": model_path,
"file_weight": weights_path}
json_string = model.to_json()
open(options['file_arch'], 'w').write(json_string)
model.save_weights(options['file_weight'])
save(self.generator, "generator")
save(self.discriminator, "discriminator")
if __name__ == '__main__':
infogan = INFOGAN()
infogan.train(epochs=50000, batch_size=128, sample_interval=50)
================================================
FILE: infogan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: lsgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: lsgan/lsgan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import matplotlib.pyplot as plt
import sys
import numpy as np
class LSGAN():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise as input and generated imgs
z = Input(shape=(self.latent_dim,))
img = self.generator(z)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The valid takes generated images as input and determines validity
valid = self.discriminator(img)
# The combined model (stacked generator and discriminator)
# Trains generator to fool discriminator
self.combined = Model(z, valid)
# (!!!) Optimize w.r.t. MSE loss instead of crossentropy
self.combined.compile(loss='mse', optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(256, input_dim=self.latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(1024))
model.add(LeakyReLU(alpha=0.2))
model.add(BatchNormalization(momentum=0.8))
model.add(Dense(np.prod(self.img_shape), activation='tanh'))
model.add(Reshape(self.img_shape))
model.summary()
noise = Input(shape=(self.latent_dim,))
img = model(noise)
return Model(noise, img)
def build_discriminator(self):
model = Sequential()
model.add(Flatten(input_shape=self.img_shape))
model.add(Dense(512))
model.add(LeakyReLU(alpha=0.2))
model.add(Dense(256))
model.add(LeakyReLU(alpha=0.2))
# (!!!) No softmax
model.add(Dense(1))
model.summary()
img = Input(shape=self.img_shape)
validity = model(img)
return Model(img, validity)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
# Sample noise as generator input
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
# Generate a batch of new images
gen_imgs = self.generator.predict(noise)
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch(imgs, valid)
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
g_loss = self.combined.train_on_batch(noise, valid)
# Plot the progress
print ("%d [D loss: %f, acc.: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[1], g_loss))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 5, 5
noise = np.random.normal(0, 1, (r * c, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
if __name__ == '__main__':
gan = LSGAN()
gan.train(epochs=30000, batch_size=32, sample_interval=200)
================================================
FILE: lsgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: pix2pix/data_loader.py
================================================
import scipy
from glob import glob
import numpy as np
import matplotlib.pyplot as plt
class DataLoader():
def __init__(self, dataset_name, img_res=(128, 128)):
self.dataset_name = dataset_name
self.img_res = img_res
def load_data(self, batch_size=1, is_testing=False):
data_type = "train" if not is_testing else "test"
path = glob('./datasets/%s/%s/*' % (self.dataset_name, data_type))
batch_images = np.random.choice(path, size=batch_size)
imgs_A = []
imgs_B = []
for img_path in batch_images:
img = self.imread(img_path)
h, w, _ = img.shape
_w = int(w/2)
img_A, img_B = img[:, :_w, :], img[:, _w:, :]
img_A = scipy.misc.imresize(img_A, self.img_res)
img_B = scipy.misc.imresize(img_B, self.img_res)
# If training => do random flip
if not is_testing and np.random.random() < 0.5:
img_A = np.fliplr(img_A)
img_B = np.fliplr(img_B)
imgs_A.append(img_A)
imgs_B.append(img_B)
imgs_A = np.array(imgs_A)/127.5 - 1.
imgs_B = np.array(imgs_B)/127.5 - 1.
return imgs_A, imgs_B
def load_batch(self, batch_size=1, is_testing=False):
data_type = "train" if not is_testing else "val"
path = glob('./datasets/%s/%s/*' % (self.dataset_name, data_type))
self.n_batches = int(len(path) / batch_size)
for i in range(self.n_batches-1):
batch = path[i*batch_size:(i+1)*batch_size]
imgs_A, imgs_B = [], []
for img in batch:
img = self.imread(img)
h, w, _ = img.shape
half_w = int(w/2)
img_A = img[:, :half_w, :]
img_B = img[:, half_w:, :]
img_A = scipy.misc.imresize(img_A, self.img_res)
img_B = scipy.misc.imresize(img_B, self.img_res)
if not is_testing and np.random.random() > 0.5:
img_A = np.fliplr(img_A)
img_B = np.fliplr(img_B)
imgs_A.append(img_A)
imgs_B.append(img_B)
imgs_A = np.array(imgs_A)/127.5 - 1.
imgs_B = np.array(imgs_B)/127.5 - 1.
yield imgs_A, imgs_B
def imread(self, path):
return scipy.misc.imread(path, mode='RGB').astype(np.float)
================================================
FILE: pix2pix/download_dataset.sh
================================================
mkdir datasets
FILE=$1
URL=https://people.eecs.berkeley.edu/~tinghuiz/projects/pix2pix/datasets/$FILE.tar.gz
TAR_FILE=./datasets/$FILE.tar.gz
TARGET_DIR=./datasets/$FILE/
wget -N $URL -O $TAR_FILE
mkdir $TARGET_DIR
tar -zxvf $TAR_FILE -C ./datasets/
rm $TAR_FILE
================================================
FILE: pix2pix/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: pix2pix/pix2pix.py
================================================
from __future__ import print_function, division
import scipy
from keras.datasets import mnist
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, Concatenate
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
import datetime
import matplotlib.pyplot as plt
import sys
from data_loader import DataLoader
import numpy as np
import os
class Pix2Pix():
def __init__(self):
# Input shape
self.img_rows = 256
self.img_cols = 256
self.channels = 3
self.img_shape = (self.img_rows, self.img_cols, self.channels)
# Configure data loader
self.dataset_name = 'facades'
self.data_loader = DataLoader(dataset_name=self.dataset_name,
img_res=(self.img_rows, self.img_cols))
# Calculate output shape of D (PatchGAN)
patch = int(self.img_rows / 2**4)
self.disc_patch = (patch, patch, 1)
# Number of filters in the first layer of G and D
self.gf = 64
self.df = 64
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
#-------------------------
# Construct Computational
# Graph of Generator
#-------------------------
# Build the generator
self.generator = self.build_generator()
# Input images and their conditioning images
img_A = Input(shape=self.img_shape)
img_B = Input(shape=self.img_shape)
# By conditioning on B generate a fake version of A
fake_A = self.generator(img_B)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# Discriminators determines validity of translated images / condition pairs
valid = self.discriminator([fake_A, img_B])
self.combined = Model(inputs=[img_A, img_B], outputs=[valid, fake_A])
self.combined.compile(loss=['mse', 'mae'],
loss_weights=[1, 100],
optimizer=optimizer)
def build_generator(self):
"""U-Net Generator"""
def conv2d(layer_input, filters, f_size=4, bn=True):
"""Layers used during downsampling"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if bn:
d = BatchNormalization(momentum=0.8)(d)
return d
def deconv2d(layer_input, skip_input, filters, f_size=4, dropout_rate=0):
"""Layers used during upsampling"""
u = UpSampling2D(size=2)(layer_input)
u = Conv2D(filters, kernel_size=f_size, strides=1, padding='same', activation='relu')(u)
if dropout_rate:
u = Dropout(dropout_rate)(u)
u = BatchNormalization(momentum=0.8)(u)
u = Concatenate()([u, skip_input])
return u
# Image input
d0 = Input(shape=self.img_shape)
# Downsampling
d1 = conv2d(d0, self.gf, bn=False)
d2 = conv2d(d1, self.gf*2)
d3 = conv2d(d2, self.gf*4)
d4 = conv2d(d3, self.gf*8)
d5 = conv2d(d4, self.gf*8)
d6 = conv2d(d5, self.gf*8)
d7 = conv2d(d6, self.gf*8)
# Upsampling
u1 = deconv2d(d7, d6, self.gf*8)
u2 = deconv2d(u1, d5, self.gf*8)
u3 = deconv2d(u2, d4, self.gf*8)
u4 = deconv2d(u3, d3, self.gf*4)
u5 = deconv2d(u4, d2, self.gf*2)
u6 = deconv2d(u5, d1, self.gf)
u7 = UpSampling2D(size=2)(u6)
output_img = Conv2D(self.channels, kernel_size=4, strides=1, padding='same', activation='tanh')(u7)
return Model(d0, output_img)
def build_discriminator(self):
def d_layer(layer_input, filters, f_size=4, bn=True):
"""Discriminator layer"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if bn:
d = BatchNormalization(momentum=0.8)(d)
return d
img_A = Input(shape=self.img_shape)
img_B = Input(shape=self.img_shape)
# Concatenate image and conditioning image by channels to produce input
combined_imgs = Concatenate(axis=-1)([img_A, img_B])
d1 = d_layer(combined_imgs, self.df, bn=False)
d2 = d_layer(d1, self.df*2)
d3 = d_layer(d2, self.df*4)
d4 = d_layer(d3, self.df*8)
validity = Conv2D(1, kernel_size=4, strides=1, padding='same')(d4)
return Model([img_A, img_B], validity)
def train(self, epochs, batch_size=1, sample_interval=50):
start_time = datetime.datetime.now()
# Adversarial loss ground truths
valid = np.ones((batch_size,) + self.disc_patch)
fake = np.zeros((batch_size,) + self.disc_patch)
for epoch in range(epochs):
for batch_i, (imgs_A, imgs_B) in enumerate(self.data_loader.load_batch(batch_size)):
# ---------------------
# Train Discriminator
# ---------------------
# Condition on B and generate a translated version
fake_A = self.generator.predict(imgs_B)
# Train the discriminators (original images = real / generated = Fake)
d_loss_real = self.discriminator.train_on_batch([imgs_A, imgs_B], valid)
d_loss_fake = self.discriminator.train_on_batch([fake_A, imgs_B], fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# -----------------
# Train Generator
# -----------------
# Train the generators
g_loss = self.combined.train_on_batch([imgs_A, imgs_B], [valid, imgs_A])
elapsed_time = datetime.datetime.now() - start_time
# Plot the progress
print ("[Epoch %d/%d] [Batch %d/%d] [D loss: %f, acc: %3d%%] [G loss: %f] time: %s" % (epoch, epochs,
batch_i, self.data_loader.n_batches,
d_loss[0], 100*d_loss[1],
g_loss[0],
elapsed_time))
# If at save interval => save generated image samples
if batch_i % sample_interval == 0:
self.sample_images(epoch, batch_i)
def sample_images(self, epoch, batch_i):
os.makedirs('images/%s' % self.dataset_name, exist_ok=True)
r, c = 3, 3
imgs_A, imgs_B = self.data_loader.load_data(batch_size=3, is_testing=True)
fake_A = self.generator.predict(imgs_B)
gen_imgs = np.concatenate([imgs_B, fake_A, imgs_A])
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
titles = ['Condition', 'Generated', 'Original']
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt])
axs[i, j].set_title(titles[i])
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/%s/%d_%d.png" % (self.dataset_name, epoch, batch_i))
plt.close()
if __name__ == '__main__':
gan = Pix2Pix()
gan.train(epochs=200, batch_size=1, sample_interval=200)
================================================
FILE: pix2pix/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: pixelda/data_loader.py
================================================
import scipy
from glob import glob
import numpy as np
from keras.datasets import mnist
from skimage.transform import resize as imresize
import pickle
import os
import urllib
import gzip
class DataLoader():
"""Loads images from MNIST (domain A) and MNIST-M (domain B)"""
def __init__(self, img_res=(128, 128)):
self.img_res = img_res
self.mnistm_url = 'https://github.com/VanushVaswani/keras_mnistm/releases/download/1.0/keras_mnistm.pkl.gz'
self.setup_mnist(img_res)
self.setup_mnistm(img_res)
def normalize(self, images):
return images.astype(np.float32) / 127.5 - 1.
def setup_mnist(self, img_res):
print ("Setting up MNIST...")
if not os.path.exists('datasets/mnist_x.npy'):
# Load the dataset
(mnist_X, mnist_y), (_, _) = mnist.load_data()
# Normalize and rescale images
mnist_X = self.normalize(mnist_X)
mnist_X = np.array([imresize(x, img_res) for x in mnist_X])
mnist_X = np.expand_dims(mnist_X, axis=-1)
mnist_X = np.repeat(mnist_X, 3, axis=-1)
self.mnist_X, self.mnist_y = mnist_X, mnist_y
# Save formatted images
np.save('datasets/mnist_x.npy', self.mnist_X)
np.save('datasets/mnist_y.npy', self.mnist_y)
else:
self.mnist_X = np.load('datasets/mnist_x.npy')
self.mnist_y = np.load('datasets/mnist_y.npy')
print ("+ Done.")
def setup_mnistm(self, img_res):
print ("Setting up MNIST-M...")
if not os.path.exists('datasets/mnistm_x.npy'):
# Download the MNIST-M pkl file
filepath = 'datasets/keras_mnistm.pkl.gz'
if not os.path.exists(filepath.replace('.gz', '')):
print('+ Downloading ' + self.mnistm_url)
data = urllib.request.urlopen(self.mnistm_url)
with open(filepath, 'wb') as f:
f.write(data.read())
with open(filepath.replace('.gz', ''), 'wb') as out_f, \
gzip.GzipFile(filepath) as zip_f:
out_f.write(zip_f.read())
os.unlink(filepath)
# load MNIST-M images from pkl file
with open('datasets/keras_mnistm.pkl', "rb") as f:
data = pickle.load(f, encoding='bytes')
# Normalize and rescale images
mnistm_X = np.array(data[b'train'])
mnistm_X = self.normalize(mnistm_X)
mnistm_X = np.array([imresize(x, img_res) for x in mnistm_X])
self.mnistm_X, self.mnistm_y = mnistm_X, self.mnist_y.copy()
# Save formatted images
np.save('datasets/mnistm_x.npy', self.mnistm_X)
np.save('datasets/mnistm_y.npy', self.mnistm_y)
else:
self.mnistm_X = np.load('datasets/mnistm_x.npy')
self.mnistm_y = np.load('datasets/mnistm_y.npy')
print ("+ Done.")
def load_data(self, domain, batch_size=1):
X = self.mnist_X if domain == 'A' else self.mnistm_X
y = self.mnist_y if domain == 'A' else self.mnistm_y
idx = np.random.choice(list(range(len(X))), size=batch_size)
return X[idx], y[idx]
================================================
FILE: pixelda/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: pixelda/pixelda.py
================================================
from __future__ import print_function, division
import scipy
from keras.datasets import mnist
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, Concatenate
from keras.layers import BatchNormalization, Activation, ZeroPadding2D, Add
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
from keras.utils import to_categorical
import datetime
import matplotlib.pyplot as plt
import sys
from data_loader import DataLoader
import numpy as np
import os
class PixelDA():
def __init__(self):
# Input shape
self.img_rows = 32
self.img_cols = 32
self.channels = 3
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.num_classes = 10
# Configure MNIST and MNIST-M data loader
self.data_loader = DataLoader(img_res=(self.img_rows, self.img_cols))
# Loss weights
lambda_adv = 10
lambda_clf = 1
# Calculate output shape of D (PatchGAN)
patch = int(self.img_rows / 2**4)
self.disc_patch = (patch, patch, 1)
# Number of residual blocks in the generator
self.residual_blocks = 6
optimizer = Adam(0.0002, 0.5)
# Number of filters in first layer of discriminator and classifier
self.df = 64
self.cf = 64
# Build and compile the discriminators
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# Build the task (classification) network
self.clf = self.build_classifier()
# Input images from both domains
img_A = Input(shape=self.img_shape)
img_B = Input(shape=self.img_shape)
# Translate images from domain A to domain B
fake_B = self.generator(img_A)
# Classify the translated image
class_pred = self.clf(fake_B)
# For the combined model we will only train the generator and classifier
self.discriminator.trainable = False
# Discriminator determines validity of translated images
valid = self.discriminator(fake_B)
self.combined = Model(img_A, [valid, class_pred])
self.combined.compile(loss=['mse', 'categorical_crossentropy'],
loss_weights=[lambda_adv, lambda_clf],
optimizer=optimizer,
metrics=['accuracy'])
def build_generator(self):
"""Resnet Generator"""
def residual_block(layer_input):
"""Residual block described in paper"""
d = Conv2D(64, kernel_size=3, strides=1, padding='same')(layer_input)
d = BatchNormalization(momentum=0.8)(d)
d = Activation('relu')(d)
d = Conv2D(64, kernel_size=3, strides=1, padding='same')(d)
d = BatchNormalization(momentum=0.8)(d)
d = Add()([d, layer_input])
return d
# Image input
img = Input(shape=self.img_shape)
l1 = Conv2D(64, kernel_size=3, padding='same', activation='relu')(img)
# Propogate signal through residual blocks
r = residual_block(l1)
for _ in range(self.residual_blocks - 1):
r = residual_block(r)
output_img = Conv2D(self.channels, kernel_size=3, padding='same', activation='tanh')(r)
return Model(img, output_img)
def build_discriminator(self):
def d_layer(layer_input, filters, f_size=4, normalization=True):
"""Discriminator layer"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if normalization:
d = InstanceNormalization()(d)
return d
img = Input(shape=self.img_shape)
d1 = d_layer(img, self.df, normalization=False)
d2 = d_layer(d1, self.df*2)
d3 = d_layer(d2, self.df*4)
d4 = d_layer(d3, self.df*8)
validity = Conv2D(1, kernel_size=4, strides=1, padding='same')(d4)
return Model(img, validity)
def build_classifier(self):
def clf_layer(layer_input, filters, f_size=4, normalization=True):
"""Classifier layer"""
d = Conv2D(filters, kernel_size=f_size, strides=2, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if normalization:
d = InstanceNormalization()(d)
return d
img = Input(shape=self.img_shape)
c1 = clf_layer(img, self.cf, normalization=False)
c2 = clf_layer(c1, self.cf*2)
c3 = clf_layer(c2, self.cf*4)
c4 = clf_layer(c3, self.cf*8)
c5 = clf_layer(c4, self.cf*8)
class_pred = Dense(self.num_classes, activation='softmax')(Flatten()(c5))
return Model(img, class_pred)
def train(self, epochs, batch_size=128, sample_interval=50):
half_batch = int(batch_size / 2)
# Classification accuracy on 100 last batches of domain B
test_accs = []
# Adversarial ground truths
valid = np.ones((batch_size, *self.disc_patch))
fake = np.zeros((batch_size, *self.disc_patch))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
imgs_A, labels_A = self.data_loader.load_data(domain="A", batch_size=batch_size)
imgs_B, labels_B = self.data_loader.load_data(domain="B", batch_size=batch_size)
# Translate images from domain A to domain B
fake_B = self.generator.predict(imgs_A)
# Train the discriminators (original images = real / translated = Fake)
d_loss_real = self.discriminator.train_on_batch(imgs_B, valid)
d_loss_fake = self.discriminator.train_on_batch(fake_B, fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# --------------------------------
# Train Generator and Classifier
# --------------------------------
# One-hot encoding of labels
labels_A = to_categorical(labels_A, num_classes=self.num_classes)
# Train the generator and classifier
g_loss = self.combined.train_on_batch(imgs_A, [valid, labels_A])
#-----------------------
# Evaluation (domain B)
#-----------------------
pred_B = self.clf.predict(imgs_B)
test_acc = np.mean(np.argmax(pred_B, axis=1) == labels_B)
# Add accuracy to list of last 100 accuracy measurements
test_accs.append(test_acc)
if len(test_accs) > 100:
test_accs.pop(0)
# Plot the progress
print ( "%d : [D - loss: %.5f, acc: %3d%%], [G - loss: %.5f], [clf - loss: %.5f, acc: %3d%%, test_acc: %3d%% (%3d%%)]" % \
(epoch, d_loss[0], 100*float(d_loss[1]),
g_loss[1], g_loss[2], 100*float(g_loss[-1]),
100*float(test_acc), 100*float(np.mean(test_accs))))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 2, 5
imgs_A, _ = self.data_loader.load_data(domain="A", batch_size=5)
# Translate images to the other domain
fake_B = self.generator.predict(imgs_A)
gen_imgs = np.concatenate([imgs_A, fake_B])
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
#titles = ['Original', 'Translated']
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt])
#axs[i, j].set_title(titles[i])
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/%d.png" % (epoch))
plt.close()
if __name__ == '__main__':
gan = PixelDA()
gan.train(epochs=30000, batch_size=32, sample_interval=500)
================================================
FILE: pixelda/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: pixelda/test.py
================================================
from __future__ import print_function, division
import scipy
import datetime
import matplotlib.pyplot as plt
import sys
from data_loader import DataLoader
import numpy as np
import os
# Configure MNIST and MNIST-M data loader
data_loader = DataLoader(img_res=(32, 32))
mnist, _ = data_loader.load_data(domain="A", batch_size=25)
mnistm, _ = data_loader.load_data(domain="B", batch_size=25)
r, c = 5, 5
for img_i, imgs in enumerate([mnist, mnistm]):
#titles = ['Original', 'Translated']
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(imgs[cnt])
#axs[i, j].set_title(titles[i])
axs[i,j].axis('off')
cnt += 1
fig.savefig("%d.png" % (img_i))
plt.close()
================================================
FILE: requirements.txt
================================================
keras
git+https://www.github.com/keras-team/keras-contrib.git
matplotlib
numpy
scipy
pillow
#urllib
#skimage
scikit-image
#gzip
#pickle
================================================
FILE: sgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: sgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: sgan/sgan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, multiply, GaussianNoise
from keras.layers import BatchNormalization, Activation, Embedding, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import Adam
from keras import losses
from keras.utils import to_categorical
import keras.backend as K
import matplotlib.pyplot as plt
import numpy as np
class SGAN:
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.num_classes = 10
self.latent_dim = 100
optimizer = Adam(0.0002, 0.5)
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(
loss=['binary_crossentropy', 'categorical_crossentropy'],
loss_weights=[0.5, 0.5],
optimizer=optimizer,
metrics=['accuracy']
)
# Build the generator
self.generator = self.build_generator()
# The generator takes noise as input and generates imgs
noise = Input(shape=(100,))
img = self.generator(noise)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# The valid takes generated images as input and determines validity
valid, _ = self.discriminator(img)
# The combined model (stacked generator and discriminator)
# Trains generator to fool discriminator
self.combined = Model(noise, valid)
self.combined.compile(loss=['binary_crossentropy'], optimizer=optimizer)
def build_generator(self):
model = Sequential()
model.add(Dense(128 * 7 * 7, activation="relu", input_dim=self.latent_dim))
model.add(Reshape((7, 7, 128)))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(128, kernel_size=3, padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(momentum=0.8))
model.add(UpSampling2D())
model.add(Conv2D(64, kernel_size=3, padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(1, kernel_size=3, padding="same"))
model.add(Activation("tanh"))
model.summary()
noise = Input(shape=(self.latent_dim,))
img = model(noise)
return Model(noise, img)
def build_discriminator(self):
model = Sequential()
model.add(Conv2D(32, kernel_size=3, strides=2, input_shape=self.img_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(64, kernel_size=3, strides=2, padding="same"))
model.add(ZeroPadding2D(padding=((0,1),(0,1))))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(128, kernel_size=3, strides=2, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(BatchNormalization(momentum=0.8))
model.add(Conv2D(256, kernel_size=3, strides=1, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Flatten())
model.summary()
img = Input(shape=self.img_shape)
features = model(img)
valid = Dense(1, activation="sigmoid")(features)
label = Dense(self.num_classes+1, activation="softmax")(features)
return Model(img, [valid, label])
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, y_train), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
y_train = y_train.reshape(-1, 1)
# Class weights:
# To balance the difference in occurences of digit class labels.
# 50% of labels that the discriminator trains on are 'fake'.
# Weight = 1 / frequency
half_batch = batch_size // 2
cw1 = {0: 1, 1: 1}
cw2 = {i: self.num_classes / half_batch for i in range(self.num_classes)}
cw2[self.num_classes] = 1 / half_batch
# Adversarial ground truths
valid = np.ones((batch_size, 1))
fake = np.zeros((batch_size, 1))
for epoch in range(epochs):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
# Sample noise and generate a batch of new images
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# One-hot encoding of labels
labels = to_categorical(y_train[idx], num_classes=self.num_classes+1)
fake_labels = to_categorical(np.full((batch_size, 1), self.num_classes), num_classes=self.num_classes+1)
# Train the discriminator
d_loss_real = self.discriminator.train_on_batch(imgs, [valid, labels], class_weight=[cw1, cw2])
d_loss_fake = self.discriminator.train_on_batch(gen_imgs, [fake, fake_labels], class_weight=[cw1, cw2])
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ---------------------
# Train Generator
# ---------------------
g_loss = self.combined.train_on_batch(noise, valid, class_weight=[cw1, cw2])
# Plot the progress
print ("%d [D loss: %f, acc: %.2f%%, op_acc: %.2f%%] [G loss: %f]" % (epoch, d_loss[0], 100*d_loss[3], 100*d_loss[4], g_loss))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 5, 5
noise = np.random.normal(0, 1, (r * c, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
def save_model(self):
def save(model, model_name):
model_path = "saved_model/%s.json" % model_name
weights_path = "saved_model/%s_weights.hdf5" % model_name
options = {"file_arch": model_path,
"file_weight": weights_path}
json_string = model.to_json()
open(options['file_arch'], 'w').write(json_string)
model.save_weights(options['file_weight'])
save(self.generator, "mnist_sgan_generator")
save(self.discriminator, "mnist_sgan_discriminator")
save(self.combined, "mnist_sgan_adversarial")
if __name__ == '__main__':
sgan = SGAN()
sgan.train(epochs=20000, batch_size=32, sample_interval=50)
================================================
FILE: srgan/data_loader.py
================================================
import scipy
from glob import glob
import numpy as np
import matplotlib.pyplot as plt
class DataLoader():
def __init__(self, dataset_name, img_res=(128, 128)):
self.dataset_name = dataset_name
self.img_res = img_res
def load_data(self, batch_size=1, is_testing=False):
data_type = "train" if not is_testing else "test"
path = glob('./datasets/%s/*' % (self.dataset_name))
batch_images = np.random.choice(path, size=batch_size)
imgs_hr = []
imgs_lr = []
for img_path in batch_images:
img = self.imread(img_path)
h, w = self.img_res
low_h, low_w = int(h / 4), int(w / 4)
img_hr = scipy.misc.imresize(img, self.img_res)
img_lr = scipy.misc.imresize(img, (low_h, low_w))
# If training => do random flip
if not is_testing and np.random.random() < 0.5:
img_hr = np.fliplr(img_hr)
img_lr = np.fliplr(img_lr)
imgs_hr.append(img_hr)
imgs_lr.append(img_lr)
imgs_hr = np.array(imgs_hr) / 127.5 - 1.
imgs_lr = np.array(imgs_lr) / 127.5 - 1.
return imgs_hr, imgs_lr
def imread(self, path):
return scipy.misc.imread(path, mode='RGB').astype(np.float)
================================================
FILE: srgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: srgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: srgan/srgan.py
================================================
"""
Super-resolution of CelebA using Generative Adversarial Networks.
The dataset can be downloaded from: https://www.dropbox.com/sh/8oqt9vytwxb3s4r/AADIKlz8PR9zr6Y20qbkunrba/Img/img_align_celeba.zip?dl=0
Instrustion on running the script:
1. Download the dataset from the provided link
2. Save the folder 'img_align_celeba' to 'datasets/'
4. Run the sript using command 'python srgan.py'
"""
from __future__ import print_function, division
import scipy
from keras.datasets import mnist
from keras_contrib.layers.normalization.instancenormalization import InstanceNormalization
from keras.layers import Input, Dense, Reshape, Flatten, Dropout, Concatenate
from keras.layers import BatchNormalization, Activation, ZeroPadding2D, Add
from keras.layers.advanced_activations import PReLU, LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.applications import VGG19
from keras.models import Sequential, Model
from keras.optimizers import Adam
import datetime
import matplotlib.pyplot as plt
import sys
from data_loader import DataLoader
import numpy as np
import os
import keras.backend as K
class SRGAN():
def __init__(self):
# Input shape
self.channels = 3
self.lr_height = 64 # Low resolution height
self.lr_width = 64 # Low resolution width
self.lr_shape = (self.lr_height, self.lr_width, self.channels)
self.hr_height = self.lr_height*4 # High resolution height
self.hr_width = self.lr_width*4 # High resolution width
self.hr_shape = (self.hr_height, self.hr_width, self.channels)
# Number of residual blocks in the generator
self.n_residual_blocks = 16
optimizer = Adam(0.0002, 0.5)
# We use a pre-trained VGG19 model to extract image features from the high resolution
# and the generated high resolution images and minimize the mse between them
self.vgg = self.build_vgg()
self.vgg.trainable = False
self.vgg.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
# Configure data loader
self.dataset_name = 'img_align_celeba'
self.data_loader = DataLoader(dataset_name=self.dataset_name,
img_res=(self.hr_height, self.hr_width))
# Calculate output shape of D (PatchGAN)
patch = int(self.hr_height / 2**4)
self.disc_patch = (patch, patch, 1)
# Number of filters in the first layer of G and D
self.gf = 64
self.df = 64
# Build and compile the discriminator
self.discriminator = self.build_discriminator()
self.discriminator.compile(loss='mse',
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# High res. and low res. images
img_hr = Input(shape=self.hr_shape)
img_lr = Input(shape=self.lr_shape)
# Generate high res. version from low res.
fake_hr = self.generator(img_lr)
# Extract image features of the generated img
fake_features = self.vgg(fake_hr)
# For the combined model we will only train the generator
self.discriminator.trainable = False
# Discriminator determines validity of generated high res. images
validity = self.discriminator(fake_hr)
self.combined = Model([img_lr, img_hr], [validity, fake_features])
self.combined.compile(loss=['binary_crossentropy', 'mse'],
loss_weights=[1e-3, 1],
optimizer=optimizer)
def build_vgg(self):
"""
Builds a pre-trained VGG19 model that outputs image features extracted at the
third block of the model
"""
vgg = VGG19(weights="imagenet")
# Set outputs to outputs of last conv. layer in block 3
# See architecture at: https://github.com/keras-team/keras/blob/master/keras/applications/vgg19.py
vgg.outputs = [vgg.layers[9].output]
img = Input(shape=self.hr_shape)
# Extract image features
img_features = vgg(img)
return Model(img, img_features)
def build_generator(self):
def residual_block(layer_input, filters):
"""Residual block described in paper"""
d = Conv2D(filters, kernel_size=3, strides=1, padding='same')(layer_input)
d = Activation('relu')(d)
d = BatchNormalization(momentum=0.8)(d)
d = Conv2D(filters, kernel_size=3, strides=1, padding='same')(d)
d = BatchNormalization(momentum=0.8)(d)
d = Add()([d, layer_input])
return d
def deconv2d(layer_input):
"""Layers used during upsampling"""
u = UpSampling2D(size=2)(layer_input)
u = Conv2D(256, kernel_size=3, strides=1, padding='same')(u)
u = Activation('relu')(u)
return u
# Low resolution image input
img_lr = Input(shape=self.lr_shape)
# Pre-residual block
c1 = Conv2D(64, kernel_size=9, strides=1, padding='same')(img_lr)
c1 = Activation('relu')(c1)
# Propogate through residual blocks
r = residual_block(c1, self.gf)
for _ in range(self.n_residual_blocks - 1):
r = residual_block(r, self.gf)
# Post-residual block
c2 = Conv2D(64, kernel_size=3, strides=1, padding='same')(r)
c2 = BatchNormalization(momentum=0.8)(c2)
c2 = Add()([c2, c1])
# Upsampling
u1 = deconv2d(c2)
u2 = deconv2d(u1)
# Generate high resolution output
gen_hr = Conv2D(self.channels, kernel_size=9, strides=1, padding='same', activation='tanh')(u2)
return Model(img_lr, gen_hr)
def build_discriminator(self):
def d_block(layer_input, filters, strides=1, bn=True):
"""Discriminator layer"""
d = Conv2D(filters, kernel_size=3, strides=strides, padding='same')(layer_input)
d = LeakyReLU(alpha=0.2)(d)
if bn:
d = BatchNormalization(momentum=0.8)(d)
return d
# Input img
d0 = Input(shape=self.hr_shape)
d1 = d_block(d0, self.df, bn=False)
d2 = d_block(d1, self.df, strides=2)
d3 = d_block(d2, self.df*2)
d4 = d_block(d3, self.df*2, strides=2)
d5 = d_block(d4, self.df*4)
d6 = d_block(d5, self.df*4, strides=2)
d7 = d_block(d6, self.df*8)
d8 = d_block(d7, self.df*8, strides=2)
d9 = Dense(self.df*16)(d8)
d10 = LeakyReLU(alpha=0.2)(d9)
validity = Dense(1, activation='sigmoid')(d10)
return Model(d0, validity)
def train(self, epochs, batch_size=1, sample_interval=50):
start_time = datetime.datetime.now()
for epoch in range(epochs):
# ----------------------
# Train Discriminator
# ----------------------
# Sample images and their conditioning counterparts
imgs_hr, imgs_lr = self.data_loader.load_data(batch_size)
# From low res. image generate high res. version
fake_hr = self.generator.predict(imgs_lr)
valid = np.ones((batch_size,) + self.disc_patch)
fake = np.zeros((batch_size,) + self.disc_patch)
# Train the discriminators (original images = real / generated = Fake)
d_loss_real = self.discriminator.train_on_batch(imgs_hr, valid)
d_loss_fake = self.discriminator.train_on_batch(fake_hr, fake)
d_loss = 0.5 * np.add(d_loss_real, d_loss_fake)
# ------------------
# Train Generator
# ------------------
# Sample images and their conditioning counterparts
imgs_hr, imgs_lr = self.data_loader.load_data(batch_size)
# The generators want the discriminators to label the generated images as real
valid = np.ones((batch_size,) + self.disc_patch)
# Extract ground truth image features using pre-trained VGG19 model
image_features = self.vgg.predict(imgs_hr)
# Train the generators
g_loss = self.combined.train_on_batch([imgs_lr, imgs_hr], [valid, image_features])
elapsed_time = datetime.datetime.now() - start_time
# Plot the progress
print ("%d time: %s" % (epoch, elapsed_time))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
os.makedirs('images/%s' % self.dataset_name, exist_ok=True)
r, c = 2, 2
imgs_hr, imgs_lr = self.data_loader.load_data(batch_size=2, is_testing=True)
fake_hr = self.generator.predict(imgs_lr)
# Rescale images 0 - 1
imgs_lr = 0.5 * imgs_lr + 0.5
fake_hr = 0.5 * fake_hr + 0.5
imgs_hr = 0.5 * imgs_hr + 0.5
# Save generated images and the high resolution originals
titles = ['Generated', 'Original']
fig, axs = plt.subplots(r, c)
cnt = 0
for row in range(r):
for col, image in enumerate([fake_hr, imgs_hr]):
axs[row, col].imshow(image[row])
axs[row, col].set_title(titles[col])
axs[row, col].axis('off')
cnt += 1
fig.savefig("images/%s/%d.png" % (self.dataset_name, epoch))
plt.close()
# Save low resolution images for comparison
for i in range(r):
fig = plt.figure()
plt.imshow(imgs_lr[i])
fig.savefig('images/%s/%d_lowres%d.png' % (self.dataset_name, epoch, i))
plt.close()
if __name__ == '__main__':
gan = SRGAN()
gan.train(epochs=30000, batch_size=1, sample_interval=50)
================================================
FILE: wgan/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: wgan/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: wgan/wgan.py
================================================
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers import Input, Dense, Reshape, Flatten, Dropout
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import RMSprop
import keras.backend as K
import matplotlib.pyplot as plt
import sys
import numpy as np
class WGAN():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 100
# Following parameter and optimizer set as recommended in paper
self.n_critic = 5
self.clip_value = 0.01
optimizer = RMSprop(lr=0.00005)
# Build and compile the critic
self.critic = self.build_critic()
self.critic.compile(loss=self.wasserstein_loss,
optimizer=optimizer,
metrics=['accuracy'])
# Build the generator
self.generator = self.build_generator()
# The generator takes noise as input and generated imgs
z = Input(shape=(self.latent_dim,))
img = self.generator(z)
# For the combined model we will only train the generator
self.critic.trainable = False
# The critic takes generated images as input and determines validity
valid = self.critic(img)
# The combined model (stacked generator and critic)
self.combined = Model(z, valid)
self.combined.compile(loss=self.wasserstein_loss,
optimizer=optimizer,
metrics=['accuracy'])
def wasserstein_loss(self, y_true, y_pred):
return K.mean(y_true * y_pred)
def build_generator(self):
model = Sequential()
model.add(Dense(128 * 7 * 7, activation="relu", input_dim=self.latent_dim))
model.add(Reshape((7, 7, 128)))
model.add(UpSampling2D())
model.add(Conv2D(128, kernel_size=4, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(Activation("relu"))
model.add(UpSampling2D())
model.add(Conv2D(64, kernel_size=4, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(Activation("relu"))
model.add(Conv2D(self.channels, kernel_size=4, padding="same"))
model.add(Activation("tanh"))
model.summary()
noise = Input(shape=(self.latent_dim,))
img = model(noise)
return Model(noise, img)
def build_critic(self):
model = Sequential()
model.add(Conv2D(16, kernel_size=3, strides=2, input_shape=self.img_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(32, kernel_size=3, strides=2, padding="same"))
model.add(ZeroPadding2D(padding=((0,1),(0,1))))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(64, kernel_size=3, strides=2, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(128, kernel_size=3, strides=1, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Flatten())
model.add(Dense(1))
model.summary()
img = Input(shape=self.img_shape)
validity = model(img)
return Model(img, validity)
def train(self, epochs, batch_size=128, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
# Adversarial ground truths
valid = -np.ones((batch_size, 1))
fake = np.ones((batch_size, 1))
for epoch in range(epochs):
for _ in range(self.n_critic):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
# Sample noise as generator input
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
# Generate a batch of new images
gen_imgs = self.generator.predict(noise)
# Train the critic
d_loss_real = self.critic.train_on_batch(imgs, valid)
d_loss_fake = self.critic.train_on_batch(gen_imgs, fake)
d_loss = 0.5 * np.add(d_loss_fake, d_loss_real)
# Clip critic weights
for l in self.critic.layers:
weights = l.get_weights()
weights = [np.clip(w, -self.clip_value, self.clip_value) for w in weights]
l.set_weights(weights)
# ---------------------
# Train Generator
# ---------------------
g_loss = self.combined.train_on_batch(noise, valid)
# Plot the progress
print ("%d [D loss: %f] [G loss: %f]" % (epoch, 1 - d_loss[0], 1 - g_loss[0]))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 5, 5
noise = np.random.normal(0, 1, (r * c, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
if __name__ == '__main__':
wgan = WGAN()
wgan.train(epochs=4000, batch_size=32, sample_interval=50)
================================================
FILE: wgan_gp/images/.gitignore
================================================
*
!.gitignore
================================================
FILE: wgan_gp/saved_model/.gitignore
================================================
*
!.gitignore
================================================
FILE: wgan_gp/wgan_gp.py
================================================
# Large amount of credit goes to:
# https://github.com/keras-team/keras-contrib/blob/master/examples/improved_wgan.py
# which I've used as a reference for this implementation
from __future__ import print_function, division
from keras.datasets import mnist
from keras.layers.merge import _Merge
from keras.layers import Input, Dense, Reshape, Flatten, Dropout
from keras.layers import BatchNormalization, Activation, ZeroPadding2D
from keras.layers.advanced_activations import LeakyReLU
from keras.layers.convolutional import UpSampling2D, Conv2D
from keras.models import Sequential, Model
from keras.optimizers import RMSprop
from functools import partial
import keras.backend as K
import matplotlib.pyplot as plt
import sys
import numpy as np
class RandomWeightedAverage(_Merge):
"""Provides a (random) weighted average between real and generated image samples"""
def _merge_function(self, inputs):
alpha = K.random_uniform((32, 1, 1, 1))
return (alpha * inputs[0]) + ((1 - alpha) * inputs[1])
class WGANGP():
def __init__(self):
self.img_rows = 28
self.img_cols = 28
self.channels = 1
self.img_shape = (self.img_rows, self.img_cols, self.channels)
self.latent_dim = 100
# Following parameter and optimizer set as recommended in paper
self.n_critic = 5
optimizer = RMSprop(lr=0.00005)
# Build the generator and critic
self.generator = self.build_generator()
self.critic = self.build_critic()
#-------------------------------
# Construct Computational Graph
# for the Critic
#-------------------------------
# Freeze generator's layers while training critic
self.generator.trainable = False
# Image input (real sample)
real_img = Input(shape=self.img_shape)
# Noise input
z_disc = Input(shape=(self.latent_dim,))
# Generate image based of noise (fake sample)
fake_img = self.generator(z_disc)
# Discriminator determines validity of the real and fake images
fake = self.critic(fake_img)
valid = self.critic(real_img)
# Construct weighted average between real and fake images
interpolated_img = RandomWeightedAverage()([real_img, fake_img])
# Determine validity of weighted sample
validity_interpolated = self.critic(interpolated_img)
# Use Python partial to provide loss function with additional
# 'averaged_samples' argument
partial_gp_loss = partial(self.gradient_penalty_loss,
averaged_samples=interpolated_img)
partial_gp_loss.__name__ = 'gradient_penalty' # Keras requires function names
self.critic_model = Model(inputs=[real_img, z_disc],
outputs=[valid, fake, validity_interpolated])
self.critic_model.compile(loss=[self.wasserstein_loss,
self.wasserstein_loss,
partial_gp_loss],
optimizer=optimizer,
loss_weights=[1, 1, 10])
#-------------------------------
# Construct Computational Graph
# for Generator
#-------------------------------
# For the generator we freeze the critic's layers
self.critic.trainable = False
self.generator.trainable = True
# Sampled noise for input to generator
z_gen = Input(shape=(self.latent_dim,))
# Generate images based of noise
img = self.generator(z_gen)
# Discriminator determines validity
valid = self.critic(img)
# Defines generator model
self.generator_model = Model(z_gen, valid)
self.generator_model.compile(loss=self.wasserstein_loss, optimizer=optimizer)
def gradient_penalty_loss(self, y_true, y_pred, averaged_samples):
"""
Computes gradient penalty based on prediction and weighted real / fake samples
"""
gradients = K.gradients(y_pred, averaged_samples)[0]
# compute the euclidean norm by squaring ...
gradients_sqr = K.square(gradients)
# ... summing over the rows ...
gradients_sqr_sum = K.sum(gradients_sqr,
axis=np.arange(1, len(gradients_sqr.shape)))
# ... and sqrt
gradient_l2_norm = K.sqrt(gradients_sqr_sum)
# compute lambda * (1 - ||grad||)^2 still for each single sample
gradient_penalty = K.square(1 - gradient_l2_norm)
# return the mean as loss over all the batch samples
return K.mean(gradient_penalty)
def wasserstein_loss(self, y_true, y_pred):
return K.mean(y_true * y_pred)
def build_generator(self):
model = Sequential()
model.add(Dense(128 * 7 * 7, activation="relu", input_dim=self.latent_dim))
model.add(Reshape((7, 7, 128)))
model.add(UpSampling2D())
model.add(Conv2D(128, kernel_size=4, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(Activation("relu"))
model.add(UpSampling2D())
model.add(Conv2D(64, kernel_size=4, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(Activation("relu"))
model.add(Conv2D(self.channels, kernel_size=4, padding="same"))
model.add(Activation("tanh"))
model.summary()
noise = Input(shape=(self.latent_dim,))
img = model(noise)
return Model(noise, img)
def build_critic(self):
model = Sequential()
model.add(Conv2D(16, kernel_size=3, strides=2, input_shape=self.img_shape, padding="same"))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(32, kernel_size=3, strides=2, padding="same"))
model.add(ZeroPadding2D(padding=((0,1),(0,1))))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(64, kernel_size=3, strides=2, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Conv2D(128, kernel_size=3, strides=1, padding="same"))
model.add(BatchNormalization(momentum=0.8))
model.add(LeakyReLU(alpha=0.2))
model.add(Dropout(0.25))
model.add(Flatten())
model.add(Dense(1))
model.summary()
img = Input(shape=self.img_shape)
validity = model(img)
return Model(img, validity)
def train(self, epochs, batch_size, sample_interval=50):
# Load the dataset
(X_train, _), (_, _) = mnist.load_data()
# Rescale -1 to 1
X_train = (X_train.astype(np.float32) - 127.5) / 127.5
X_train = np.expand_dims(X_train, axis=3)
# Adversarial ground truths
valid = -np.ones((batch_size, 1))
fake = np.ones((batch_size, 1))
dummy = np.zeros((batch_size, 1)) # Dummy gt for gradient penalty
for epoch in range(epochs):
for _ in range(self.n_critic):
# ---------------------
# Train Discriminator
# ---------------------
# Select a random batch of images
idx = np.random.randint(0, X_train.shape[0], batch_size)
imgs = X_train[idx]
# Sample generator input
noise = np.random.normal(0, 1, (batch_size, self.latent_dim))
# Train the critic
d_loss = self.critic_model.train_on_batch([imgs, noise],
[valid, fake, dummy])
# ---------------------
# Train Generator
# ---------------------
g_loss = self.generator_model.train_on_batch(noise, valid)
# Plot the progress
print ("%d [D loss: %f] [G loss: %f]" % (epoch, d_loss[0], g_loss))
# If at save interval => save generated image samples
if epoch % sample_interval == 0:
self.sample_images(epoch)
def sample_images(self, epoch):
r, c = 5, 5
noise = np.random.normal(0, 1, (r * c, self.latent_dim))
gen_imgs = self.generator.predict(noise)
# Rescale images 0 - 1
gen_imgs = 0.5 * gen_imgs + 0.5
fig, axs = plt.subplots(r, c)
cnt = 0
for i in range(r):
for j in range(c):
axs[i,j].imshow(gen_imgs[cnt, :,:,0], cmap='gray')
axs[i,j].axis('off')
cnt += 1
fig.savefig("images/mnist_%d.png" % epoch)
plt.close()
if __name__ == '__main__':
wgan = WGANGP()
wgan.train(epochs=30000, batch_size=32, sample_interval=100)