
[](https://discord.gg/uPEBbYYDB6)
[](https://crates.io/crates/burn)
[](https://crates.io/crates/burn)
[](https://burn.dev/docs/burn)
[](https://github.com/tracel-ai/burn/actions/workflows/test.yml)
[](#license)
[](https://deepwiki.com/tracel-ai/burn)
[
](https://www.runblaze.dev)
---
**Burn is a next generation Tensor Library and Deep Learning Framework that doesn't compromise on
flexibility, efficiency and portability.**
Burn is both a tensor library and a deep learning framework optimized for numerical computing, model
inference and model training. Burn leverages Rust to perform optimizations normally only available
in static-graph frameworks, offering optimal speed without impacting flexibility.
## Backend
Burn strives to be as fast as possible on as many hardwares as possible, with robust
implementations. We believe this flexibility is crucial for modern needs where you may train your
models in the cloud, then deploy on customer hardwares, which vary from user to user.
### Supported Backends
Most backends support all operating systems, so we don't mention them in the tables below.
**GPU Backends:**
| | CUDA | ROCm | Metal | Vulkan | WebGPU | LibTorch |
| ------- | ---- | ---- | ----- | ------ | ------ | -------- |
| Nvidia | ☑️ | - | - | ☑️ | ☑️ | ☑️ |
| AMD | - | ☑️ | - | ☑️ | ☑️ | ☑️ |
| Apple | - | - | ☑️ | - | ☑️ | ☑️ |
| Intel | - | - | - | ☑️ | ☑️ | - |
| Qualcom | - | - | - | ☑️ | ☑️ | - |
| Wasm | - | - | - | - | ☑️ | - |
**CPU Backends:**
| | Cpu (CubeCL) | NdArray | LibTorch |
| ------ | ------------ | ------- | -------- |
| X86 | ☑️ | ☑️ | ☑️ |
| Arm | ☑️ | ☑️ | ☑️ |
| Wasm | - | ☑️ | - |
| no-std | - | ☑️ | - |
Compared to other frameworks, Burn has a very different approach to supporting many backends. By
design, most code is generic over the Backend trait, which allows us to build Burn with swappable
backends. This makes composing backend possible, augmenting them with additional functionalities
such as autodifferentiation and automatic kernel fusion.
Autodiff: Backend decorator that brings backpropagation to any backend 🔄
Contrary to the aforementioned backends, Autodiff is actually a backend _decorator_. This means that
it cannot exist by itself; it must encapsulate another backend.
The simple act of wrapping a base backend with Autodiff transparently equips it with
autodifferentiation support, making it possible to call backward on your model.
```rust
use burn::backend::{Autodiff, Wgpu};
use burn::tensor::{Distribution, Tensor};
fn main() {
type Backend = Autodiff;
let device = Default::default();
let x: Tensor = Tensor::random([32, 32], Distribution::Default, &device);
let y: Tensor = Tensor::random([32, 32], Distribution::Default, &device).require_grad();
let tmp = x.clone() + y.clone();
let tmp = tmp.matmul(x);
let tmp = tmp.exp();
let grads = tmp.backward();
let y_grad = y.grad(&grads).unwrap();
println!("{y_grad}");
}
```
Of note, it is impossible to make the mistake of calling backward on a model that runs on a backend
that does not support autodiff (for inference), as this method is only offered by an Autodiff
backend.
See the [Autodiff Backend README](./crates/burn-autodiff/README.md) for more details.
Fusion: Backend decorator that brings kernel fusion to all first-party backends
This backend decorator enhances a backend with kernel fusion, provided that the inner backend
supports it. Note that you can compose this backend with other backend decorators such as Autodiff.
All first-party accelerated backends (like WGPU and CUDA) use Fusion by default (`burn/fusion`
feature flag), so you typically don't need to apply it manually.
```rust
#[cfg(not(feature = "fusion"))]
pub type Cuda = CubeBackend;
#[cfg(feature = "fusion")]
pub type Cuda = burn_fusion::Fusion>;
```
Of note, we plan to implement automatic gradient checkpointing based on compute bound and memory
bound operations, which will work gracefully with the fusion backend to make your code run even
faster during training, see [this issue](https://github.com/tracel-ai/burn/issues/936).
See the [Fusion Backend README](./crates/burn-fusion/README.md) for more details.
Router (Beta): Backend decorator that composes multiple backends into a single one
That backend simplifies hardware operability, if for instance you want to execute some operations on
the CPU and other operations on the GPU.
```rust
use burn::tensor::{Distribution, Tensor};
use burn::backend::{
NdArray, Router, Wgpu, ndarray::NdArrayDevice, router::duo::MultiDevice, wgpu::WgpuDevice,
};
fn main() {
type Backend = Router<(Wgpu, NdArray)>;
let device_0 = MultiDevice::B1(WgpuDevice::DiscreteGpu(0));
let device_1 = MultiDevice::B2(NdArrayDevice::Cpu);
let tensor_gpu =
Tensor::::random([3, 3], burn::tensor::Distribution::Default, &device_0);
let tensor_cpu =
Tensor::::random([3, 3], burn::tensor::Distribution::Default, &device_1);
}
```
Remote (Beta): Backend decorator for remote backend execution, useful for distributed computations
That backend has two parts, one client and one server. The client sends tensor operations over the
network to a remote compute backend. You can use any first-party backend as server in a single line
of code:
```rust
fn main_server() {
// Start a server on port 3000.
burn::server::start::(Default::default(), 3000);
}
fn main_client() {
// Create a client that communicate with the server on port 3000.
use burn::backend::{Autodiff, RemoteBackend};
type Backend = Autodiff;
let device = RemoteDevice::new("ws://localhost:3000");
let tensor_gpu =
Tensor::::random([3, 3], Distribution::Default, &device);
}
```
## Training & Inference
The whole deep learning workflow is made easy with Burn, as you can monitor your training progress
with an ergonomic dashboard, and run inference everywhere from embedded devices to large GPU
clusters.
Burn was built from the ground up with training and inference in mind. It's also worth noting how
Burn, in comparison to frameworks like PyTorch, simplifies the transition from training to
deployment, eliminating the need for code changes.
**Click on the following sections to expand 👇**
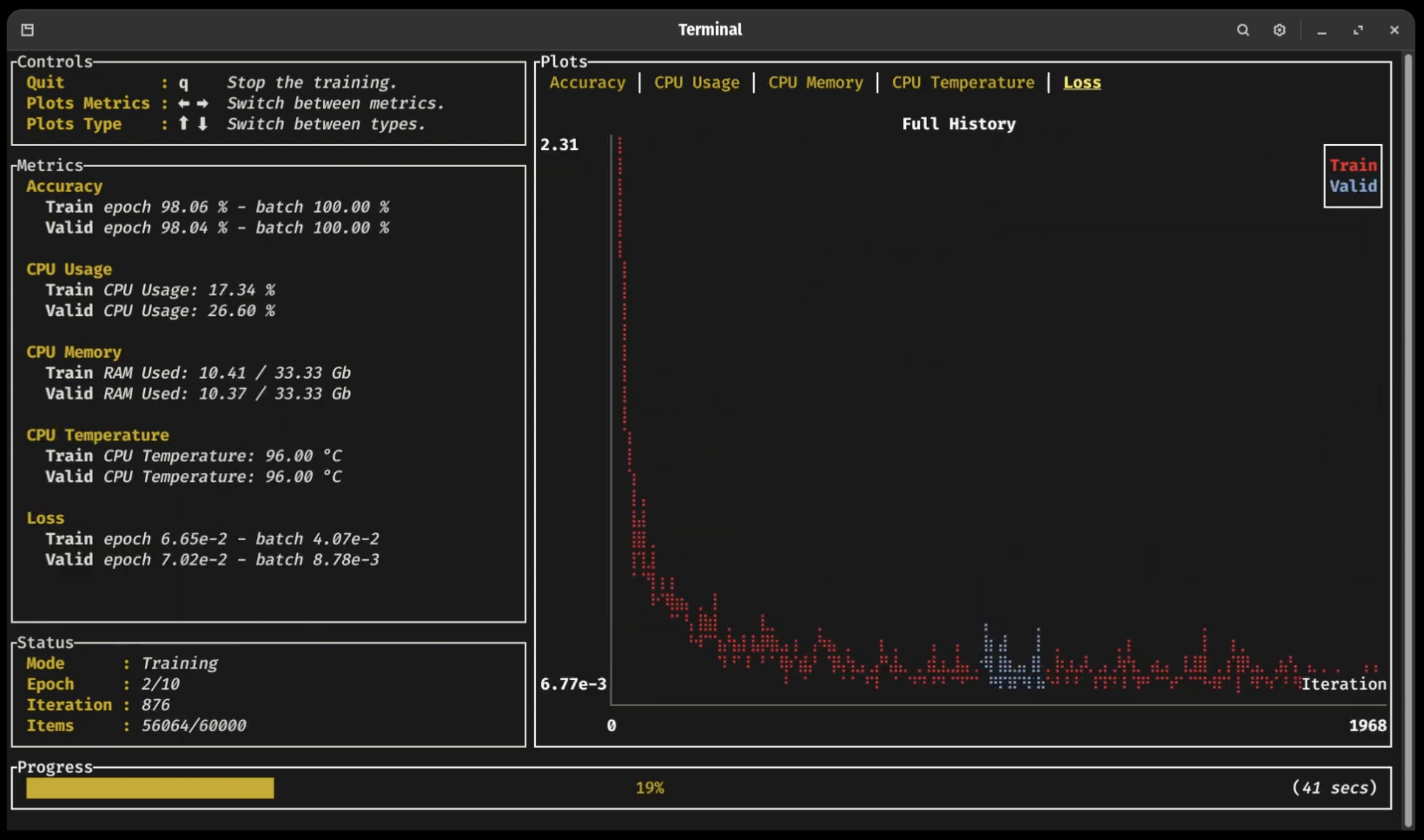
Training Dashboard 📈
As you can see in the previous video (click on the picture!), a new terminal UI dashboard based on
the [Ratatui](https://github.com/ratatui-org/ratatui) crate allows users to follow their training
with ease without having to connect to any external application.
You can visualize your training and validation metrics updating in real-time and analyze the
lifelong progression or recent history of any registered metrics using only the arrow keys. Break
from the training loop without crashing, allowing potential checkpoints to be fully written or
important pieces of code to complete without interruption 🛡
ONNX Support 🐫
Burn supports importing ONNX (Open Neural Network Exchange) models through the
[burn-onnx](https://github.com/tracel-ai/burn-onnx) crate, allowing you to easily port models from
TensorFlow or PyTorch to Burn. The ONNX model is converted into Rust code that uses Burn's native
APIs, enabling the imported model to run on any Burn backend (CPU, GPU, WebAssembly) and benefit
from all of Burn's optimizations like automatic kernel fusion.
Our ONNX support is further described in
[this section of the Burn Book 🔥](https://burn.dev/books/burn/onnx-import.html).
> **Note**: This crate is in active development and currently supports a
> [limited set of ONNX operators](https://github.com/tracel-ai/burn-onnx/blob/main/SUPPORTED-ONNX-OPS.md).
Importing PyTorch or Safetensors Models 🚚
You can load weights from PyTorch or Safetensors formats directly into your Burn-defined models.
This makes it easy to reuse existing models while benefiting from Burn's performance and deployment
features.
Learn more in the [Saving & Loading Models](https://burn.dev/books/burn/saving-and-loading.html)
section of the Burn Book.
Inference in the Browser 🌐
Several of our backends can run in WebAssembly environments: NdArray for CPU execution, and WGPU for
GPU acceleration via WebGPU. This means that you can run inference directly within a browser. We
provide several examples of this:
- [MNIST](./examples/mnist-inference-web) where you can draw digits and a small convnet tries to
find which one it is! 2️⃣ 7️⃣ 😰
- [Image Classification](https://github.com/tracel-ai/burn-onnx/tree/main/examples/image-classification-web)
where you can upload images and classify them! 🌄
Embedded: no_std support ⚙️
Burn's core components support [no_std](https://docs.rust-embedded.org/book/intro/no-std.html). This
means it can run in bare metal environment such as embedded devices without an operating system.
> As of now, only the NdArray backend can be used in a _no_std_ environment.
### Benchmarks
To evaluate performance across different backends and track improvements over time, we provide a
dedicated benchmarking suite.
Run and compare benchmarks using [burn-bench](https://github.com/tracel-ai/burn-bench).
> ⚠️ **Warning** When using one of the `wgpu` backends, you may encounter compilation errors related
> to recursive type evaluation. This is due to complex type nesting within the `wgpu` dependency
> chain. To resolve this issue, add the following line at the top of your `main.rs` or `lib.rs`
> file:
>
> ```rust
> #![recursion_limit = "256"]
> ```
>
> The default recursion limit (128) is often just below the required depth (typically 130-150) due
> to deeply nested associated types and trait bounds.
## Getting Started

Just heard of Burn? You are at the right place! Just continue reading this section and we hope you
can get on board really quickly.
The Burn Book 🔥
To begin working effectively with Burn, it is crucial to understand its key components and
philosophy. This is why we highly recommend new users to read the first sections of
[The Burn Book 🔥](https://burn.dev/books/burn/). It provides detailed examples and explanations
covering every facet of the framework, including building blocks like tensors, modules, and
optimizers, all the way to advanced usage, like coding your own GPU kernels.
> The project is constantly evolving, and we try as much as possible to keep the book up to date
> with new additions. However, we might miss some details sometimes, so if you see something weird,
> let us know! We also gladly accept Pull Requests 😄
Examples 🙏
Let's start with a code snippet that shows how intuitive the framework is to use! In the following,
we declare a neural network module with some parameters along with its forward pass.
```rust
use burn::nn;
use burn::module::Module;
use burn::tensor::backend::Backend;
#[derive(Module, Debug)]
pub struct PositionWiseFeedForward {
linear_inner: nn::Linear,
linear_outer: nn::Linear,
dropout: nn::Dropout,
gelu: nn::Gelu,
}
impl PositionWiseFeedForward {
pub fn forward(&self, input: Tensor) -> Tensor {
let x = self.linear_inner.forward(input);
let x = self.gelu.forward(x);
let x = self.dropout.forward(x);
self.linear_outer.forward(x)
}
}
```
We have a somewhat large amount of [examples](./examples) in the repository that shows how to use
the framework in different scenarios.
Following [the book](https://burn.dev/books/burn/):
- [Basic Workflow](./examples/guide) : Creates a custom CNN `Module` to train on the MNIST dataset
and use for inference.
- [Custom Training Loop](./examples/custom-training-loop) : Implements a basic training loop instead
of using the `Learner`.
- [Custom WGPU Kernel](./examples/custom-wgpu-kernel) : Learn how to create your own custom
operation with the WGPU backend.
Additional examples:
- [Custom CSV Dataset](./examples/custom-csv-dataset) : Implements a dataset to parse CSV data for a
regression task.
- [Regression](./examples/simple-regression) : Trains a simple MLP on the California Housing dataset
to predict the median house value for a district.
- [Custom Image Dataset](./examples/custom-image-dataset) : Trains a simple CNN on custom image
dataset following a simple folder structure.
- [Custom Renderer](./examples/custom-renderer) : Implements a custom renderer to display the
[`Learner`](./building-blocks/learner.md) progress.
- [Image Classification Web](./examples/image-classification-web) : Image classification web browser
demo using Burn, WGPU and WebAssembly.
- [MNIST Inference on Web](./examples/mnist-inference-web) : An interactive MNIST inference demo in
the browser. The demo is available [online](https://burn.dev/demo/).
- [MNIST Training](./examples/mnist) : Demonstrates how to train a custom `Module` (MLP) with the
`Learner` configured to log metrics and keep training checkpoints.
- [PyTorch Import Inference](./examples/import-model-weights) : Imports a PyTorch model pre-trained
on MNIST to perform inference on a sample image with Burn.
- [Text Classification](./examples/text-classification) : Trains a text classification transformer
model on the AG News or DbPedia dataset. The trained model can then be used to classify a text
sample.
- [Text Generation](./examples/text-generation) : Trains a text generation transformer model on the
DbPedia dataset.
- [Wasserstein GAN MNIST](./examples/wgan) : Trains a WGAN model to generate new handwritten digits
based on MNIST.
For more practical insights, you can clone the repository and run any of them directly on your
computer!
Pre-trained Models 🤖
We keep an updated and curated list of models and examples built with Burn, see the
[tracel-ai/models repository](https://github.com/tracel-ai/models) for more details.
Don't see the model you want? Don't hesitate to open an issue, and we may prioritize it. Built a
model using Burn and want to share it? You can also open a Pull Request and add your model under the
community section!
Why use Rust for Deep Learning? 🦀
Deep Learning is a special form of software where you need very high level abstractions as well as
extremely fast execution time. Rust is the perfect candidate for that use case since it provides
zero-cost abstractions to easily create neural network modules, and fine-grained control over memory
to optimize every detail.
It's important that a framework be easy to use at a high level so that its users can focus on
innovating in the AI field. However, since running models relies so heavily on computations,
performance can't be neglected.
To this day, the mainstream solution to this problem has been to offer APIs in Python, but rely on
bindings to low-level languages such as C/C++. This reduces portability, increases complexity and
creates frictions between researchers and engineers. We feel like Rust's approach to abstractions
makes it versatile enough to tackle this two languages dichotomy.
Rust also comes with the Cargo package manager, which makes it incredibly easy to build, test, and
deploy from any environment, which is usually a pain in Python.
Although Rust has the reputation of being a difficult language at first, we strongly believe it
leads to more reliable, bug-free solutions built faster (after some practice 😅)!
> **Deprecation Note**
Since `0.14.0`, the internal structure for tensor data has changed. The
> previous `Data` struct was deprecated and officially removed since `0.17.0` in favor of the new
> `TensorData` struct, which allows for more flexibility by storing the underlying data as bytes and
> keeping the data type as a field. If you are using `Data` in your code, make sure to switch to
> `TensorData`.
Loading Model Records From Previous Versions ⚠️
In the event that you are trying to load a model record saved in a version older than `0.14.0`, make
sure to use a compatible version (`0.14`, `0.15` or `0.16`) with the `record-backward-compat`
feature flag.
```
features = [..., "record-backward-compat"]
```
Otherwise, the record won't be deserialized correctly and you will get an error message. This error
will also point you to the backward compatible feature flag.
The backward compatibility was maintained for deserialization when loading records. Therefore, as
soon as you have saved the record again it will be saved according to the new structure and you can
upgrade back to the current version
Please note that binary formats are not backward compatible. Thus, you will need to load your record
in a previous version and save it in any of the other self-describing record format (e.g., using the
`NamedMpkFileRecorder`) before using a compatible version (as described) with the
`record-backward-compat` feature flag.
## Community
If you are excited about the project, don't hesitate to join our
[Discord](https://discord.gg/uPEBbYYDB6)! We try to be as welcoming as possible to everybody from
any background. You can ask your questions and share what you built with the community!
**Contributing**
Before contributing, please read the [Contributing Guidelines](./CONTRIBUTING.md) and our
[Code of Conduct](./CODE-OF-CONDUCT.md). The [Contributor Book](https://burn.dev/contributor-book/)
covers architecture, environment setup, and guides for common tasks.
## Status
Burn is currently in active development, and there will be breaking changes. While any resulting
issues are likely to be easy to fix, there are no guarantees at this stage.
## License
Burn is distributed under the terms of both the MIT license and the Apache License (Version 2.0).
See [LICENSE-APACHE](./LICENSE-APACHE) and [LICENSE-MIT](./LICENSE-MIT) for details. Opening a pull
request is assumed to signal agreement with these licensing terms.
 ================================================
FILE: burn-book/src/basic-workflow/data.md
================================================
# Data
Typically, one trains a model on some dataset. Burn provides a library of very useful dataset
sources and transformations, such as Hugging Face dataset utilities that allow to download and store
data into an SQLite database for extremely efficient data streaming and storage. For this guide
though, we will use the MNIST dataset from `burn::data::dataset::vision` which requires no external
dependency.
To iterate over a dataset efficiently, we will define a struct which will implement the `Batcher`
trait. The goal of a batcher is to map individual dataset items into a batched tensor that can be
used as input to our previously defined model.
Let us start by defining our dataset functionalities in a file `src/data.rs`. We shall omit some of
the imports for brevity, but the full code for following this guide can be found at
`examples/guide/` [directory](https://github.com/tracel-ai/burn/tree/main/examples/guide).
```rust , ignore
use burn::{
data::{dataloader::batcher::Batcher, dataset::vision::MnistItem},
prelude::*,
};
#[derive(Clone, Default)]
pub struct MnistBatcher {}
```
This batcher is pretty straightforward, as it only defines a struct that will implement the
`Batcher` trait. The trait is generic over the `Backend` trait, which includes an associated type
for the device, as not all backends expose the same devices. As an example, the Libtorch-based
backend exposes `Cuda(gpu_index)`, `Cpu`, `Vulkan` and `Metal` devices, while the ndarray backend
only exposes the `Cpu` device.
Next, we need to actually implement the batching logic.
```rust , ignore
# use burn::{
# data::{dataloader::batcher::Batcher, dataset::vision::MnistItem},
# prelude::*,
# };
#
# #[derive(Clone, Default)]
# pub struct MnistBatcher {}
#
#[derive(Clone, Debug)]
pub struct MnistBatch
================================================
FILE: burn-book/src/basic-workflow/data.md
================================================
# Data
Typically, one trains a model on some dataset. Burn provides a library of very useful dataset
sources and transformations, such as Hugging Face dataset utilities that allow to download and store
data into an SQLite database for extremely efficient data streaming and storage. For this guide
though, we will use the MNIST dataset from `burn::data::dataset::vision` which requires no external
dependency.
To iterate over a dataset efficiently, we will define a struct which will implement the `Batcher`
trait. The goal of a batcher is to map individual dataset items into a batched tensor that can be
used as input to our previously defined model.
Let us start by defining our dataset functionalities in a file `src/data.rs`. We shall omit some of
the imports for brevity, but the full code for following this guide can be found at
`examples/guide/` [directory](https://github.com/tracel-ai/burn/tree/main/examples/guide).
```rust , ignore
use burn::{
data::{dataloader::batcher::Batcher, dataset::vision::MnistItem},
prelude::*,
};
#[derive(Clone, Default)]
pub struct MnistBatcher {}
```
This batcher is pretty straightforward, as it only defines a struct that will implement the
`Batcher` trait. The trait is generic over the `Backend` trait, which includes an associated type
for the device, as not all backends expose the same devices. As an example, the Libtorch-based
backend exposes `Cuda(gpu_index)`, `Cpu`, `Vulkan` and `Metal` devices, while the ndarray backend
only exposes the `Cpu` device.
Next, we need to actually implement the batching logic.
```rust , ignore
# use burn::{
# data::{dataloader::batcher::Batcher, dataset::vision::MnistItem},
# prelude::*,
# };
#
# #[derive(Clone, Default)]
# pub struct MnistBatcher {}
#
#[derive(Clone, Debug)]
pub struct MnistBatch Although we have conveniently implemented the
[`MnistDataset`](https://github.com/tracel-ai/burn/blob/main/crates/burn-dataset/src/vision/mnist.rs)
used in the guide, we'll go over its implementation to demonstrate how the `Dataset` and `Batcher`
traits are used.
The [MNIST dataset](http://yann.lecun.com/exdb/mnist/) of handwritten digits has a training set of
60,000 examples and a test set of 10,000 examples. A single item in the dataset is represented by a
\\(28 \times 28\\) pixels black-and-white image (stored as raw bytes) with its corresponding label
(a digit between \\(0\\) and \\(9\\)). This is defined by the `MnistItemRaw` struct.
```rust, ignore
# #[derive(Deserialize, Debug, Clone)]
struct MnistItemRaw {
pub image_bytes: Vec
Although we have conveniently implemented the
[`MnistDataset`](https://github.com/tracel-ai/burn/blob/main/crates/burn-dataset/src/vision/mnist.rs)
used in the guide, we'll go over its implementation to demonstrate how the `Dataset` and `Batcher`
traits are used.
The [MNIST dataset](http://yann.lecun.com/exdb/mnist/) of handwritten digits has a training set of
60,000 examples and a test set of 10,000 examples. A single item in the dataset is represented by a
\\(28 \times 28\\) pixels black-and-white image (stored as raw bytes) with its corresponding label
(a digit between \\(0\\) and \\(9\\)). This is defined by the `MnistItemRaw` struct.
```rust, ignore
# #[derive(Deserialize, Debug, Clone)]
struct MnistItemRaw {
pub image_bytes: Vec