




 ##
## 
 ##
##
##
##  \n",
"\n",
"\n",
"
\n",
"\n",
"\n",
" \n",
"
\n",
" "
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "0eq1SMWl6Sfn"
},
"source": [
"# 2. Validate\n",
"Validate a model's accuracy on the [Imagenet](https://image-net.org/) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"colab": {
"base_uri": "https://localhost:8080/"
},
"id": "WQPtK1QYVaD_",
"outputId": "20fc0630-141e-4a90-ea06-342cbd7ce496"
},
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"--2022-11-22 19:53:40-- https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar\n",
"Resolving image-net.org (image-net.org)... 171.64.68.16\n",
"Connecting to image-net.org (image-net.org)|171.64.68.16|:443... connected.\n",
"HTTP request sent, awaiting response... 200 OK\n",
"Length: 6744924160 (6.3G) [application/x-tar]\n",
"Saving to: ‘ILSVRC2012_img_val.tar’\n",
"\n",
"ILSVRC2012_img_val. 100%[===================>] 6.28G 16.1MB/s in 10m 52s \n",
"\n",
"2022-11-22 20:04:32 (9.87 MB/s) - ‘ILSVRC2012_img_val.tar’ saved [6744924160/6744924160]\n",
"\n"
]
}
],
"source": [
"# Download Imagenet val (6.3G, 50000 images)\n",
"!bash data/scripts/get_imagenet.sh --val"
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"colab": {
"base_uri": "https://localhost:8080/"
},
"id": "X58w8JLpMnjH",
"outputId": "41843132-98e2-4c25-d474-4cd7b246fb8e"
},
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"\u001b[34m\u001b[1mclassify/val: \u001b[0mdata=../datasets/imagenet, weights=['yolov5s-cls.pt'], batch_size=128, imgsz=224, device=, workers=8, verbose=True, project=runs/val-cls, name=exp, exist_ok=False, half=True, dnn=False\n",
"YOLOv5 🚀 v7.0-3-g61ebf5e Python-3.7.15 torch-1.12.1+cu113 CUDA:0 (Tesla T4, 15110MiB)\n",
"\n",
"Fusing layers... \n",
"Model summary: 117 layers, 5447688 parameters, 0 gradients, 11.4 GFLOPs\n",
"validating: 100% 391/391 [04:57<00:00, 1.31it/s]\n",
" Class Images top1_acc top5_acc\n",
" all 50000 0.715 0.902\n",
" tench 50 0.94 0.98\n",
" goldfish 50 0.88 0.92\n",
" great white shark 50 0.78 0.96\n",
" tiger shark 50 0.68 0.96\n",
" hammerhead shark 50 0.82 0.92\n",
" electric ray 50 0.76 0.9\n",
" stingray 50 0.7 0.9\n",
" cock 50 0.78 0.92\n",
" hen 50 0.84 0.96\n",
" ostrich 50 0.98 1\n",
" brambling 50 0.9 0.96\n",
" goldfinch 50 0.92 0.98\n",
" house finch 50 0.88 0.96\n",
" junco 50 0.94 0.98\n",
" indigo bunting 50 0.86 0.88\n",
" American robin 50 0.9 0.96\n",
" bulbul 50 0.84 0.96\n",
" jay 50 0.9 0.96\n",
" magpie 50 0.84 0.96\n",
" chickadee 50 0.9 1\n",
" American dipper 50 0.82 0.92\n",
" kite 50 0.76 0.94\n",
" bald eagle 50 0.92 1\n",
" vulture 50 0.96 1\n",
" great grey owl 50 0.94 0.98\n",
" fire salamander 50 0.96 0.98\n",
" smooth newt 50 0.58 0.94\n",
" newt 50 0.74 0.9\n",
" spotted salamander 50 0.86 0.94\n",
" axolotl 50 0.86 0.96\n",
" American bullfrog 50 0.78 0.92\n",
" tree frog 50 0.84 0.96\n",
" tailed frog 50 0.48 0.8\n",
" loggerhead sea turtle 50 0.68 0.94\n",
" leatherback sea turtle 50 0.5 0.8\n",
" mud turtle 50 0.64 0.84\n",
" terrapin 50 0.52 0.98\n",
" box turtle 50 0.84 0.98\n",
" banded gecko 50 0.7 0.88\n",
" green iguana 50 0.76 0.94\n",
" Carolina anole 50 0.58 0.96\n",
"desert grassland whiptail lizard 50 0.82 0.94\n",
" agama 50 0.74 0.92\n",
" frilled-necked lizard 50 0.84 0.86\n",
" alligator lizard 50 0.58 0.78\n",
" Gila monster 50 0.72 0.8\n",
" European green lizard 50 0.42 0.9\n",
" chameleon 50 0.76 0.84\n",
" Komodo dragon 50 0.86 0.96\n",
" Nile crocodile 50 0.7 0.84\n",
" American alligator 50 0.76 0.96\n",
" triceratops 50 0.9 0.94\n",
" worm snake 50 0.76 0.88\n",
" ring-necked snake 50 0.8 0.92\n",
" eastern hog-nosed snake 50 0.58 0.88\n",
" smooth green snake 50 0.6 0.94\n",
" kingsnake 50 0.82 0.9\n",
" garter snake 50 0.88 0.94\n",
" water snake 50 0.7 0.94\n",
" vine snake 50 0.66 0.76\n",
" night snake 50 0.34 0.82\n",
" boa constrictor 50 0.8 0.96\n",
" African rock python 50 0.48 0.76\n",
" Indian cobra 50 0.82 0.94\n",
" green mamba 50 0.54 0.86\n",
" sea snake 50 0.62 0.9\n",
" Saharan horned viper 50 0.56 0.86\n",
"eastern diamondback rattlesnake 50 0.6 0.86\n",
" sidewinder 50 0.28 0.86\n",
" trilobite 50 0.98 0.98\n",
" harvestman 50 0.86 0.94\n",
" scorpion 50 0.86 0.94\n",
" yellow garden spider 50 0.92 0.96\n",
" barn spider 50 0.38 0.98\n",
" European garden spider 50 0.62 0.98\n",
" southern black widow 50 0.88 0.94\n",
" tarantula 50 0.94 1\n",
" wolf spider 50 0.82 0.92\n",
" tick 50 0.74 0.84\n",
" centipede 50 0.68 0.82\n",
" black grouse 50 0.88 0.98\n",
" ptarmigan 50 0.78 0.94\n",
" ruffed grouse 50 0.88 1\n",
" prairie grouse 50 0.92 1\n",
" peacock 50 0.88 0.9\n",
" quail 50 0.9 0.94\n",
" partridge 50 0.74 0.96\n",
" grey parrot 50 0.9 0.96\n",
" macaw 50 0.88 0.98\n",
"sulphur-crested cockatoo 50 0.86 0.92\n",
" lorikeet 50 0.96 1\n",
" coucal 50 0.82 0.88\n",
" bee eater 50 0.96 0.98\n",
" hornbill 50 0.9 0.96\n",
" hummingbird 50 0.88 0.96\n",
" jacamar 50 0.92 0.94\n",
" toucan 50 0.84 0.94\n",
" duck 50 0.76 0.94\n",
" red-breasted merganser 50 0.86 0.96\n",
" goose 50 0.74 0.96\n",
" black swan 50 0.94 0.98\n",
" tusker 50 0.54 0.92\n",
" echidna 50 0.98 1\n",
" platypus 50 0.72 0.84\n",
" wallaby 50 0.78 0.88\n",
" koala 50 0.84 0.92\n",
" wombat 50 0.78 0.84\n",
" jellyfish 50 0.88 0.96\n",
" sea anemone 50 0.72 0.9\n",
" brain coral 50 0.88 0.96\n",
" flatworm 50 0.8 0.98\n",
" nematode 50 0.86 0.9\n",
" conch 50 0.74 0.88\n",
" snail 50 0.78 0.88\n",
" slug 50 0.74 0.82\n",
" sea slug 50 0.88 0.98\n",
" chiton 50 0.88 0.98\n",
" chambered nautilus 50 0.88 0.92\n",
" Dungeness crab 50 0.78 0.94\n",
" rock crab 50 0.68 0.86\n",
" fiddler crab 50 0.64 0.86\n",
" red king crab 50 0.76 0.96\n",
" American lobster 50 0.78 0.96\n",
" spiny lobster 50 0.74 0.88\n",
" crayfish 50 0.56 0.86\n",
" hermit crab 50 0.78 0.96\n",
" isopod 50 0.66 0.78\n",
" white stork 50 0.88 0.96\n",
" black stork 50 0.84 0.98\n",
" spoonbill 50 0.96 1\n",
" flamingo 50 0.94 1\n",
" little blue heron 50 0.92 0.98\n",
" great egret 50 0.9 0.96\n",
" bittern 50 0.86 0.94\n",
" crane (bird) 50 0.62 0.9\n",
" limpkin 50 0.98 1\n",
" common gallinule 50 0.92 0.96\n",
" American coot 50 0.9 0.98\n",
" bustard 50 0.92 0.96\n",
" ruddy turnstone 50 0.94 1\n",
" dunlin 50 0.86 0.94\n",
" common redshank 50 0.9 0.96\n",
" dowitcher 50 0.84 0.96\n",
" oystercatcher 50 0.86 0.94\n",
" pelican 50 0.92 0.96\n",
" king penguin 50 0.88 0.96\n",
" albatross 50 0.9 1\n",
" grey whale 50 0.84 0.92\n",
" killer whale 50 0.92 1\n",
" dugong 50 0.84 0.96\n",
" sea lion 50 0.82 0.92\n",
" Chihuahua 50 0.66 0.84\n",
" Japanese Chin 50 0.72 0.98\n",
" Maltese 50 0.76 0.94\n",
" Pekingese 50 0.84 0.94\n",
" Shih Tzu 50 0.74 0.96\n",
" King Charles Spaniel 50 0.88 0.98\n",
" Papillon 50 0.86 0.94\n",
" toy terrier 50 0.48 0.94\n",
" Rhodesian Ridgeback 50 0.76 0.98\n",
" Afghan Hound 50 0.84 1\n",
" Basset Hound 50 0.8 0.92\n",
" Beagle 50 0.82 0.96\n",
" Bloodhound 50 0.48 0.72\n",
" Bluetick Coonhound 50 0.86 0.94\n",
" Black and Tan Coonhound 50 0.54 0.8\n",
"Treeing Walker Coonhound 50 0.66 0.98\n",
" English foxhound 50 0.32 0.84\n",
" Redbone Coonhound 50 0.62 0.94\n",
" borzoi 50 0.92 1\n",
" Irish Wolfhound 50 0.48 0.88\n",
" Italian Greyhound 50 0.76 0.98\n",
" Whippet 50 0.74 0.92\n",
" Ibizan Hound 50 0.6 0.86\n",
" Norwegian Elkhound 50 0.88 0.98\n",
" Otterhound 50 0.62 0.9\n",
" Saluki 50 0.72 0.92\n",
" Scottish Deerhound 50 0.86 0.98\n",
" Weimaraner 50 0.88 0.94\n",
"Staffordshire Bull Terrier 50 0.66 0.98\n",
"American Staffordshire Terrier 50 0.64 0.92\n",
" Bedlington Terrier 50 0.9 0.92\n",
" Border Terrier 50 0.86 0.92\n",
" Kerry Blue Terrier 50 0.78 0.98\n",
" Irish Terrier 50 0.7 0.96\n",
" Norfolk Terrier 50 0.68 0.9\n",
" Norwich Terrier 50 0.72 1\n",
" Yorkshire Terrier 50 0.66 0.9\n",
" Wire Fox Terrier 50 0.64 0.98\n",
" Lakeland Terrier 50 0.74 0.92\n",
" Sealyham Terrier 50 0.76 0.9\n",
" Airedale Terrier 50 0.82 0.92\n",
" Cairn Terrier 50 0.76 0.9\n",
" Australian Terrier 50 0.48 0.84\n",
" Dandie Dinmont Terrier 50 0.82 0.92\n",
" Boston Terrier 50 0.92 1\n",
" Miniature Schnauzer 50 0.68 0.9\n",
" Giant Schnauzer 50 0.72 0.98\n",
" Standard Schnauzer 50 0.74 1\n",
" Scottish Terrier 50 0.76 0.96\n",
" Tibetan Terrier 50 0.48 1\n",
"Australian Silky Terrier 50 0.66 0.96\n",
"Soft-coated Wheaten Terrier 50 0.74 0.96\n",
"West Highland White Terrier 50 0.88 0.96\n",
" Lhasa Apso 50 0.68 0.96\n",
" Flat-Coated Retriever 50 0.72 0.94\n",
" Curly-coated Retriever 50 0.82 0.94\n",
" Golden Retriever 50 0.86 0.94\n",
" Labrador Retriever 50 0.82 0.94\n",
"Chesapeake Bay Retriever 50 0.76 0.96\n",
"German Shorthaired Pointer 50 0.8 0.96\n",
" Vizsla 50 0.68 0.96\n",
" English Setter 50 0.7 1\n",
" Irish Setter 50 0.8 0.9\n",
" Gordon Setter 50 0.84 0.92\n",
" Brittany 50 0.84 0.96\n",
" Clumber Spaniel 50 0.92 0.96\n",
"English Springer Spaniel 50 0.88 1\n",
" Welsh Springer Spaniel 50 0.92 1\n",
" Cocker Spaniels 50 0.7 0.94\n",
" Sussex Spaniel 50 0.72 0.92\n",
" Irish Water Spaniel 50 0.88 0.98\n",
" Kuvasz 50 0.66 0.9\n",
" Schipperke 50 0.9 0.98\n",
" Groenendael 50 0.8 0.94\n",
" Malinois 50 0.86 0.98\n",
" Briard 50 0.52 0.8\n",
" Australian Kelpie 50 0.6 0.88\n",
" Komondor 50 0.88 0.94\n",
" Old English Sheepdog 50 0.94 0.98\n",
" Shetland Sheepdog 50 0.74 0.9\n",
" collie 50 0.6 0.96\n",
" Border Collie 50 0.74 0.96\n",
" Bouvier des Flandres 50 0.78 0.94\n",
" Rottweiler 50 0.88 0.96\n",
" German Shepherd Dog 50 0.8 0.98\n",
" Dobermann 50 0.68 0.96\n",
" Miniature Pinscher 50 0.76 0.88\n",
"Greater Swiss Mountain Dog 50 0.68 0.94\n",
" Bernese Mountain Dog 50 0.96 1\n",
" Appenzeller Sennenhund 50 0.22 1\n",
" Entlebucher Sennenhund 50 0.64 0.98\n",
" Boxer 50 0.7 0.92\n",
" Bullmastiff 50 0.78 0.98\n",
" Tibetan Mastiff 50 0.88 0.96\n",
" French Bulldog 50 0.84 0.94\n",
" Great Dane 50 0.54 0.9\n",
" St. Bernard 50 0.92 1\n",
" husky 50 0.46 0.98\n",
" Alaskan Malamute 50 0.76 0.96\n",
" Siberian Husky 50 0.46 0.98\n",
" Dalmatian 50 0.94 0.98\n",
" Affenpinscher 50 0.78 0.9\n",
" Basenji 50 0.92 0.94\n",
" pug 50 0.94 0.98\n",
" Leonberger 50 1 1\n",
" Newfoundland 50 0.78 0.96\n",
" Pyrenean Mountain Dog 50 0.78 0.96\n",
" Samoyed 50 0.96 1\n",
" Pomeranian 50 0.98 1\n",
" Chow Chow 50 0.9 0.96\n",
" Keeshond 50 0.88 0.94\n",
" Griffon Bruxellois 50 0.84 0.98\n",
" Pembroke Welsh Corgi 50 0.82 0.94\n",
" Cardigan Welsh Corgi 50 0.66 0.98\n",
" Toy Poodle 50 0.52 0.88\n",
" Miniature Poodle 50 0.52 0.92\n",
" Standard Poodle 50 0.8 1\n",
" Mexican hairless dog 50 0.88 0.98\n",
" grey wolf 50 0.82 0.92\n",
" Alaskan tundra wolf 50 0.78 0.98\n",
" red wolf 50 0.48 0.9\n",
" coyote 50 0.64 0.86\n",
" dingo 50 0.76 0.88\n",
" dhole 50 0.9 0.98\n",
" African wild dog 50 0.98 1\n",
" hyena 50 0.88 0.96\n",
" red fox 50 0.54 0.92\n",
" kit fox 50 0.72 0.98\n",
" Arctic fox 50 0.94 1\n",
" grey fox 50 0.7 0.94\n",
" tabby cat 50 0.54 0.92\n",
" tiger cat 50 0.22 0.94\n",
" Persian cat 50 0.9 0.98\n",
" Siamese cat 50 0.96 1\n",
" Egyptian Mau 50 0.54 0.8\n",
" cougar 50 0.9 1\n",
" lynx 50 0.72 0.88\n",
" leopard 50 0.78 0.98\n",
" snow leopard 50 0.9 0.98\n",
" jaguar 50 0.7 0.94\n",
" lion 50 0.9 0.98\n",
" tiger 50 0.92 0.98\n",
" cheetah 50 0.94 0.98\n",
" brown bear 50 0.94 0.98\n",
" American black bear 50 0.8 1\n",
" polar bear 50 0.84 0.96\n",
" sloth bear 50 0.72 0.92\n",
" mongoose 50 0.7 0.92\n",
" meerkat 50 0.82 0.92\n",
" tiger beetle 50 0.92 0.94\n",
" ladybug 50 0.86 0.94\n",
" ground beetle 50 0.64 0.94\n",
" longhorn beetle 50 0.62 0.88\n",
" leaf beetle 50 0.64 0.98\n",
" dung beetle 50 0.86 0.98\n",
" rhinoceros beetle 50 0.86 0.94\n",
" weevil 50 0.9 1\n",
" fly 50 0.78 0.94\n",
" bee 50 0.68 0.94\n",
" ant 50 0.68 0.78\n",
" grasshopper 50 0.5 0.92\n",
" cricket 50 0.64 0.92\n",
" stick insect 50 0.64 0.92\n",
" cockroach 50 0.72 0.8\n",
" mantis 50 0.64 0.86\n",
" cicada 50 0.9 0.96\n",
" leafhopper 50 0.88 0.94\n",
" lacewing 50 0.78 0.92\n",
" dragonfly 50 0.82 0.98\n",
" damselfly 50 0.82 1\n",
" red admiral 50 0.94 0.96\n",
" ringlet 50 0.86 0.98\n",
" monarch butterfly 50 0.9 0.92\n",
" small white 50 0.9 1\n",
" sulphur butterfly 50 0.92 1\n",
"gossamer-winged butterfly 50 0.88 1\n",
" starfish 50 0.88 0.92\n",
" sea urchin 50 0.84 0.94\n",
" sea cucumber 50 0.66 0.84\n",
" cottontail rabbit 50 0.72 0.94\n",
" hare 50 0.84 0.96\n",
" Angora rabbit 50 0.94 0.98\n",
" hamster 50 0.96 1\n",
" porcupine 50 0.88 0.98\n",
" fox squirrel 50 0.76 0.94\n",
" marmot 50 0.92 0.96\n",
" beaver 50 0.78 0.94\n",
" guinea pig 50 0.78 0.94\n",
" common sorrel 50 0.96 0.98\n",
" zebra 50 0.94 0.96\n",
" pig 50 0.5 0.76\n",
" wild boar 50 0.84 0.96\n",
" warthog 50 0.84 0.96\n",
" hippopotamus 50 0.88 0.96\n",
" ox 50 0.48 0.94\n",
" water buffalo 50 0.78 0.94\n",
" bison 50 0.88 0.96\n",
" ram 50 0.58 0.92\n",
" bighorn sheep 50 0.66 1\n",
" Alpine ibex 50 0.92 0.98\n",
" hartebeest 50 0.94 1\n",
" impala 50 0.82 0.96\n",
" gazelle 50 0.7 0.96\n",
" dromedary 50 0.9 1\n",
" llama 50 0.82 0.94\n",
" weasel 50 0.44 0.92\n",
" mink 50 0.78 0.96\n",
" European polecat 50 0.46 0.9\n",
" black-footed ferret 50 0.68 0.96\n",
" otter 50 0.66 0.88\n",
" skunk 50 0.96 0.96\n",
" badger 50 0.86 0.92\n",
" armadillo 50 0.88 0.9\n",
" three-toed sloth 50 0.96 1\n",
" orangutan 50 0.78 0.92\n",
" gorilla 50 0.82 0.94\n",
" chimpanzee 50 0.84 0.94\n",
" gibbon 50 0.76 0.86\n",
" siamang 50 0.68 0.94\n",
" guenon 50 0.8 0.94\n",
" patas monkey 50 0.62 0.82\n",
" baboon 50 0.9 0.98\n",
" macaque 50 0.8 0.86\n",
" langur 50 0.6 0.82\n",
" black-and-white colobus 50 0.86 0.9\n",
" proboscis monkey 50 1 1\n",
" marmoset 50 0.74 0.98\n",
" white-headed capuchin 50 0.72 0.9\n",
" howler monkey 50 0.86 0.94\n",
" titi 50 0.5 0.9\n",
"Geoffroy's spider monkey 50 0.42 0.8\n",
" common squirrel monkey 50 0.76 0.92\n",
" ring-tailed lemur 50 0.72 0.94\n",
" indri 50 0.9 0.96\n",
" Asian elephant 50 0.58 0.92\n",
" African bush elephant 50 0.7 0.98\n",
" red panda 50 0.94 0.94\n",
" giant panda 50 0.94 0.98\n",
" snoek 50 0.74 0.9\n",
" eel 50 0.6 0.84\n",
" coho salmon 50 0.84 0.96\n",
" rock beauty 50 0.88 0.98\n",
" clownfish 50 0.78 0.98\n",
" sturgeon 50 0.68 0.94\n",
" garfish 50 0.62 0.8\n",
" lionfish 50 0.96 0.96\n",
" pufferfish 50 0.88 0.96\n",
" abacus 50 0.74 0.88\n",
" abaya 50 0.84 0.92\n",
" academic gown 50 0.42 0.86\n",
" accordion 50 0.8 0.9\n",
" acoustic guitar 50 0.5 0.76\n",
" aircraft carrier 50 0.8 0.96\n",
" airliner 50 0.92 1\n",
" airship 50 0.76 0.82\n",
" altar 50 0.64 0.98\n",
" ambulance 50 0.88 0.98\n",
" amphibious vehicle 50 0.64 0.94\n",
" analog clock 50 0.52 0.92\n",
" apiary 50 0.82 0.96\n",
" apron 50 0.7 0.84\n",
" waste container 50 0.4 0.8\n",
" assault rifle 50 0.42 0.84\n",
" backpack 50 0.34 0.64\n",
" bakery 50 0.4 0.68\n",
" balance beam 50 0.8 0.98\n",
" balloon 50 0.86 0.96\n",
" ballpoint pen 50 0.52 0.96\n",
" Band-Aid 50 0.7 0.9\n",
" banjo 50 0.84 1\n",
" baluster 50 0.68 0.94\n",
" barbell 50 0.56 0.9\n",
" barber chair 50 0.7 0.92\n",
" barbershop 50 0.54 0.86\n",
" barn 50 0.96 0.96\n",
" barometer 50 0.84 0.98\n",
" barrel 50 0.56 0.88\n",
" wheelbarrow 50 0.66 0.88\n",
" baseball 50 0.74 0.98\n",
" basketball 50 0.88 0.98\n",
" bassinet 50 0.66 0.92\n",
" bassoon 50 0.74 0.98\n",
" swimming cap 50 0.62 0.88\n",
" bath towel 50 0.54 0.78\n",
" bathtub 50 0.4 0.88\n",
" station wagon 50 0.66 0.84\n",
" lighthouse 50 0.78 0.94\n",
" beaker 50 0.52 0.68\n",
" military cap 50 0.84 0.96\n",
" beer bottle 50 0.66 0.88\n",
" beer glass 50 0.6 0.84\n",
" bell-cot 50 0.56 0.96\n",
" bib 50 0.58 0.82\n",
" tandem bicycle 50 0.86 0.96\n",
" bikini 50 0.56 0.88\n",
" ring binder 50 0.64 0.84\n",
" binoculars 50 0.54 0.78\n",
" birdhouse 50 0.86 0.94\n",
" boathouse 50 0.74 0.92\n",
" bobsleigh 50 0.92 0.96\n",
" bolo tie 50 0.8 0.94\n",
" poke bonnet 50 0.64 0.86\n",
" bookcase 50 0.66 0.92\n",
" bookstore 50 0.62 0.88\n",
" bottle cap 50 0.58 0.7\n",
" bow 50 0.72 0.86\n",
" bow tie 50 0.7 0.9\n",
" brass 50 0.92 0.96\n",
" bra 50 0.5 0.7\n",
" breakwater 50 0.62 0.86\n",
" breastplate 50 0.4 0.9\n",
" broom 50 0.6 0.86\n",
" bucket 50 0.66 0.8\n",
" buckle 50 0.5 0.68\n",
" bulletproof vest 50 0.5 0.78\n",
" high-speed train 50 0.94 0.96\n",
" butcher shop 50 0.74 0.94\n",
" taxicab 50 0.64 0.86\n",
" cauldron 50 0.44 0.66\n",
" candle 50 0.48 0.74\n",
" cannon 50 0.88 0.94\n",
" canoe 50 0.94 1\n",
" can opener 50 0.66 0.86\n",
" cardigan 50 0.68 0.8\n",
" car mirror 50 0.94 0.96\n",
" carousel 50 0.94 0.98\n",
" tool kit 50 0.56 0.78\n",
" carton 50 0.42 0.7\n",
" car wheel 50 0.38 0.74\n",
"automated teller machine 50 0.76 0.94\n",
" cassette 50 0.52 0.8\n",
" cassette player 50 0.28 0.9\n",
" castle 50 0.78 0.88\n",
" catamaran 50 0.78 1\n",
" CD player 50 0.52 0.82\n",
" cello 50 0.82 1\n",
" mobile phone 50 0.68 0.86\n",
" chain 50 0.38 0.66\n",
" chain-link fence 50 0.7 0.84\n",
" chain mail 50 0.64 0.9\n",
" chainsaw 50 0.84 0.92\n",
" chest 50 0.68 0.92\n",
" chiffonier 50 0.26 0.64\n",
" chime 50 0.62 0.84\n",
" china cabinet 50 0.82 0.96\n",
" Christmas stocking 50 0.92 0.94\n",
" church 50 0.62 0.9\n",
" movie theater 50 0.58 0.88\n",
" cleaver 50 0.32 0.62\n",
" cliff dwelling 50 0.88 1\n",
" cloak 50 0.32 0.64\n",
" clogs 50 0.58 0.88\n",
" cocktail shaker 50 0.62 0.7\n",
" coffee mug 50 0.44 0.72\n",
" coffeemaker 50 0.64 0.92\n",
" coil 50 0.66 0.84\n",
" combination lock 50 0.64 0.84\n",
" computer keyboard 50 0.7 0.82\n",
" confectionery store 50 0.54 0.86\n",
" container ship 50 0.82 0.98\n",
" convertible 50 0.78 0.98\n",
" corkscrew 50 0.82 0.92\n",
" cornet 50 0.46 0.88\n",
" cowboy boot 50 0.64 0.8\n",
" cowboy hat 50 0.64 0.82\n",
" cradle 50 0.38 0.8\n",
" crane (machine) 50 0.78 0.94\n",
" crash helmet 50 0.92 0.96\n",
" crate 50 0.52 0.82\n",
" infant bed 50 0.74 1\n",
" Crock Pot 50 0.78 0.9\n",
" croquet ball 50 0.9 0.96\n",
" crutch 50 0.46 0.7\n",
" cuirass 50 0.54 0.86\n",
" dam 50 0.74 0.92\n",
" desk 50 0.6 0.86\n",
" desktop computer 50 0.54 0.94\n",
" rotary dial telephone 50 0.88 0.94\n",
" diaper 50 0.68 0.84\n",
" digital clock 50 0.54 0.76\n",
" digital watch 50 0.58 0.86\n",
" dining table 50 0.76 0.9\n",
" dishcloth 50 0.94 1\n",
" dishwasher 50 0.44 0.78\n",
" disc brake 50 0.98 1\n",
" dock 50 0.54 0.94\n",
" dog sled 50 0.84 1\n",
" dome 50 0.72 0.92\n",
" doormat 50 0.56 0.82\n",
" drilling rig 50 0.84 0.96\n",
" drum 50 0.38 0.68\n",
" drumstick 50 0.56 0.72\n",
" dumbbell 50 0.62 0.9\n",
" Dutch oven 50 0.7 0.84\n",
" electric fan 50 0.82 0.86\n",
" electric guitar 50 0.62 0.84\n",
" electric locomotive 50 0.92 0.98\n",
" entertainment center 50 0.9 0.98\n",
" envelope 50 0.44 0.86\n",
" espresso machine 50 0.72 0.94\n",
" face powder 50 0.7 0.92\n",
" feather boa 50 0.7 0.84\n",
" filing cabinet 50 0.88 0.98\n",
" fireboat 50 0.94 0.98\n",
" fire engine 50 0.84 0.9\n",
" fire screen sheet 50 0.62 0.76\n",
" flagpole 50 0.74 0.88\n",
" flute 50 0.36 0.72\n",
" folding chair 50 0.62 0.84\n",
" football helmet 50 0.86 0.94\n",
" forklift 50 0.8 0.92\n",
" fountain 50 0.84 0.94\n",
" fountain pen 50 0.76 0.92\n",
" four-poster bed 50 0.78 0.94\n",
" freight car 50 0.96 1\n",
" French horn 50 0.76 0.92\n",
" frying pan 50 0.36 0.78\n",
" fur coat 50 0.84 0.96\n",
" garbage truck 50 0.9 0.98\n",
" gas mask 50 0.84 0.92\n",
" gas pump 50 0.9 0.98\n",
" goblet 50 0.68 0.82\n",
" go-kart 50 0.9 1\n",
" golf ball 50 0.84 0.9\n",
" golf cart 50 0.78 0.86\n",
" gondola 50 0.98 0.98\n",
" gong 50 0.74 0.92\n",
" gown 50 0.62 0.96\n",
" grand piano 50 0.7 0.96\n",
" greenhouse 50 0.8 0.98\n",
" grille 50 0.72 0.9\n",
" grocery store 50 0.66 0.94\n",
" guillotine 50 0.86 0.92\n",
" barrette 50 0.52 0.66\n",
" hair spray 50 0.5 0.74\n",
" half-track 50 0.78 0.9\n",
" hammer 50 0.56 0.76\n",
" hamper 50 0.64 0.84\n",
" hair dryer 50 0.56 0.74\n",
" hand-held computer 50 0.42 0.86\n",
" handkerchief 50 0.78 0.94\n",
" hard disk drive 50 0.76 0.84\n",
" harmonica 50 0.7 0.88\n",
" harp 50 0.88 0.96\n",
" harvester 50 0.78 1\n",
" hatchet 50 0.54 0.74\n",
" holster 50 0.66 0.84\n",
" home theater 50 0.64 0.94\n",
" honeycomb 50 0.56 0.88\n",
" hook 50 0.3 0.6\n",
" hoop skirt 50 0.64 0.86\n",
" horizontal bar 50 0.68 0.98\n",
" horse-drawn vehicle 50 0.88 0.94\n",
" hourglass 50 0.88 0.96\n",
" iPod 50 0.76 0.94\n",
" clothes iron 50 0.82 0.88\n",
" jack-o'-lantern 50 0.98 0.98\n",
" jeans 50 0.68 0.84\n",
" jeep 50 0.72 0.9\n",
" T-shirt 50 0.72 0.96\n",
" jigsaw puzzle 50 0.84 0.94\n",
" pulled rickshaw 50 0.86 0.94\n",
" joystick 50 0.8 0.9\n",
" kimono 50 0.84 0.96\n",
" knee pad 50 0.62 0.88\n",
" knot 50 0.66 0.8\n",
" lab coat 50 0.8 0.96\n",
" ladle 50 0.36 0.64\n",
" lampshade 50 0.48 0.84\n",
" laptop computer 50 0.26 0.88\n",
" lawn mower 50 0.78 0.96\n",
" lens cap 50 0.46 0.72\n",
" paper knife 50 0.26 0.5\n",
" library 50 0.54 0.9\n",
" lifeboat 50 0.92 0.98\n",
" lighter 50 0.56 0.78\n",
" limousine 50 0.76 0.92\n",
" ocean liner 50 0.88 0.94\n",
" lipstick 50 0.74 0.9\n",
" slip-on shoe 50 0.74 0.92\n",
" lotion 50 0.5 0.86\n",
" speaker 50 0.52 0.68\n",
" loupe 50 0.32 0.52\n",
" sawmill 50 0.72 0.9\n",
" magnetic compass 50 0.52 0.82\n",
" mail bag 50 0.68 0.92\n",
" mailbox 50 0.82 0.92\n",
" tights 50 0.22 0.94\n",
" tank suit 50 0.24 0.9\n",
" manhole cover 50 0.96 0.98\n",
" maraca 50 0.74 0.9\n",
" marimba 50 0.84 0.94\n",
" mask 50 0.44 0.82\n",
" match 50 0.66 0.9\n",
" maypole 50 0.96 1\n",
" maze 50 0.8 0.96\n",
" measuring cup 50 0.54 0.76\n",
" medicine chest 50 0.6 0.84\n",
" megalith 50 0.8 0.92\n",
" microphone 50 0.52 0.7\n",
" microwave oven 50 0.48 0.72\n",
" military uniform 50 0.62 0.84\n",
" milk can 50 0.68 0.82\n",
" minibus 50 0.7 1\n",
" miniskirt 50 0.46 0.76\n",
" minivan 50 0.38 0.8\n",
" missile 50 0.4 0.84\n",
" mitten 50 0.76 0.88\n",
" mixing bowl 50 0.8 0.92\n",
" mobile home 50 0.54 0.78\n",
" Model T 50 0.92 0.96\n",
" modem 50 0.58 0.86\n",
" monastery 50 0.44 0.9\n",
" monitor 50 0.4 0.86\n",
" moped 50 0.56 0.94\n",
" mortar 50 0.68 0.94\n",
" square academic cap 50 0.5 0.84\n",
" mosque 50 0.9 1\n",
" mosquito net 50 0.9 0.98\n",
" scooter 50 0.9 0.98\n",
" mountain bike 50 0.78 0.96\n",
" tent 50 0.88 0.96\n",
" computer mouse 50 0.42 0.82\n",
" mousetrap 50 0.76 0.88\n",
" moving van 50 0.4 0.72\n",
" muzzle 50 0.5 0.72\n",
" nail 50 0.68 0.74\n",
" neck brace 50 0.56 0.68\n",
" necklace 50 0.86 1\n",
" nipple 50 0.7 0.88\n",
" notebook computer 50 0.34 0.84\n",
" obelisk 50 0.8 0.92\n",
" oboe 50 0.6 0.84\n",
" ocarina 50 0.8 0.86\n",
" odometer 50 0.96 1\n",
" oil filter 50 0.58 0.82\n",
" organ 50 0.82 0.9\n",
" oscilloscope 50 0.9 0.96\n",
" overskirt 50 0.2 0.7\n",
" bullock cart 50 0.7 0.94\n",
" oxygen mask 50 0.46 0.84\n",
" packet 50 0.5 0.78\n",
" paddle 50 0.56 0.94\n",
" paddle wheel 50 0.86 0.96\n",
" padlock 50 0.74 0.78\n",
" paintbrush 50 0.62 0.8\n",
" pajamas 50 0.56 0.92\n",
" palace 50 0.64 0.96\n",
" pan flute 50 0.84 0.86\n",
" paper towel 50 0.66 0.84\n",
" parachute 50 0.92 0.94\n",
" parallel bars 50 0.62 0.96\n",
" park bench 50 0.74 0.9\n",
" parking meter 50 0.84 0.92\n",
" passenger car 50 0.5 0.82\n",
" patio 50 0.58 0.84\n",
" payphone 50 0.74 0.92\n",
" pedestal 50 0.52 0.9\n",
" pencil case 50 0.64 0.92\n",
" pencil sharpener 50 0.52 0.78\n",
" perfume 50 0.7 0.9\n",
" Petri dish 50 0.6 0.8\n",
" photocopier 50 0.88 0.98\n",
" plectrum 50 0.7 0.84\n",
" Pickelhaube 50 0.72 0.86\n",
" picket fence 50 0.84 0.94\n",
" pickup truck 50 0.64 0.92\n",
" pier 50 0.52 0.82\n",
" piggy bank 50 0.82 0.94\n",
" pill bottle 50 0.76 0.86\n",
" pillow 50 0.76 0.9\n",
" ping-pong ball 50 0.84 0.88\n",
" pinwheel 50 0.76 0.88\n",
" pirate ship 50 0.76 0.94\n",
" pitcher 50 0.46 0.84\n",
" hand plane 50 0.84 0.94\n",
" planetarium 50 0.88 0.98\n",
" plastic bag 50 0.36 0.62\n",
" plate rack 50 0.52 0.78\n",
" plow 50 0.78 0.88\n",
" plunger 50 0.42 0.7\n",
" Polaroid camera 50 0.84 0.92\n",
" pole 50 0.38 0.74\n",
" police van 50 0.76 0.94\n",
" poncho 50 0.58 0.86\n",
" billiard table 50 0.8 0.88\n",
" soda bottle 50 0.56 0.94\n",
" pot 50 0.78 0.92\n",
" potter's wheel 50 0.9 0.94\n",
" power drill 50 0.42 0.72\n",
" prayer rug 50 0.7 0.86\n",
" printer 50 0.54 0.86\n",
" prison 50 0.7 0.9\n",
" projectile 50 0.28 0.9\n",
" projector 50 0.62 0.84\n",
" hockey puck 50 0.92 0.96\n",
" punching bag 50 0.6 0.68\n",
" purse 50 0.42 0.78\n",
" quill 50 0.68 0.84\n",
" quilt 50 0.64 0.9\n",
" race car 50 0.72 0.92\n",
" racket 50 0.72 0.9\n",
" radiator 50 0.66 0.76\n",
" radio 50 0.64 0.92\n",
" radio telescope 50 0.9 0.96\n",
" rain barrel 50 0.8 0.98\n",
" recreational vehicle 50 0.84 0.94\n",
" reel 50 0.72 0.82\n",
" reflex camera 50 0.72 0.92\n",
" refrigerator 50 0.7 0.9\n",
" remote control 50 0.7 0.88\n",
" restaurant 50 0.5 0.66\n",
" revolver 50 0.82 1\n",
" rifle 50 0.38 0.7\n",
" rocking chair 50 0.62 0.84\n",
" rotisserie 50 0.88 0.92\n",
" eraser 50 0.54 0.76\n",
" rugby ball 50 0.86 0.94\n",
" ruler 50 0.68 0.86\n",
" running shoe 50 0.78 0.94\n",
" safe 50 0.82 0.92\n",
" safety pin 50 0.4 0.62\n",
" salt shaker 50 0.66 0.9\n",
" sandal 50 0.66 0.86\n",
" sarong 50 0.64 0.86\n",
" saxophone 50 0.66 0.88\n",
" scabbard 50 0.76 0.92\n",
" weighing scale 50 0.58 0.78\n",
" school bus 50 0.92 1\n",
" schooner 50 0.84 1\n",
" scoreboard 50 0.9 0.96\n",
" CRT screen 50 0.14 0.7\n",
" screw 50 0.9 0.98\n",
" screwdriver 50 0.3 0.58\n",
" seat belt 50 0.88 0.94\n",
" sewing machine 50 0.76 0.9\n",
" shield 50 0.56 0.82\n",
" shoe store 50 0.78 0.96\n",
" shoji 50 0.8 0.92\n",
" shopping basket 50 0.52 0.88\n",
" shopping cart 50 0.76 0.92\n",
" shovel 50 0.62 0.84\n",
" shower cap 50 0.7 0.84\n",
" shower curtain 50 0.64 0.82\n",
" ski 50 0.74 0.92\n",
" ski mask 50 0.72 0.88\n",
" sleeping bag 50 0.68 0.8\n",
" slide rule 50 0.72 0.88\n",
" sliding door 50 0.44 0.78\n",
" slot machine 50 0.94 0.98\n",
" snorkel 50 0.86 0.98\n",
" snowmobile 50 0.88 1\n",
" snowplow 50 0.84 0.98\n",
" soap dispenser 50 0.56 0.86\n",
" soccer ball 50 0.86 0.96\n",
" sock 50 0.62 0.76\n",
" solar thermal collector 50 0.72 0.96\n",
" sombrero 50 0.6 0.84\n",
" soup bowl 50 0.56 0.94\n",
" space bar 50 0.34 0.88\n",
" space heater 50 0.52 0.74\n",
" space shuttle 50 0.82 0.96\n",
" spatula 50 0.3 0.6\n",
" motorboat 50 0.86 1\n",
" spider web 50 0.7 0.9\n",
" spindle 50 0.86 0.98\n",
" sports car 50 0.6 0.94\n",
" spotlight 50 0.26 0.6\n",
" stage 50 0.68 0.86\n",
" steam locomotive 50 0.94 1\n",
" through arch bridge 50 0.84 0.96\n",
" steel drum 50 0.82 0.9\n",
" stethoscope 50 0.6 0.82\n",
" scarf 50 0.5 0.92\n",
" stone wall 50 0.76 0.9\n",
" stopwatch 50 0.58 0.9\n",
" stove 50 0.46 0.74\n",
" strainer 50 0.64 0.84\n",
" tram 50 0.88 0.96\n",
" stretcher 50 0.6 0.8\n",
" couch 50 0.8 0.96\n",
" stupa 50 0.88 0.88\n",
" submarine 50 0.72 0.92\n",
" suit 50 0.4 0.78\n",
" sundial 50 0.58 0.74\n",
" sunglass 50 0.14 0.58\n",
" sunglasses 50 0.28 0.58\n",
" sunscreen 50 0.32 0.7\n",
" suspension bridge 50 0.6 0.94\n",
" mop 50 0.74 0.92\n",
" sweatshirt 50 0.28 0.66\n",
" swimsuit 50 0.52 0.82\n",
" swing 50 0.76 0.84\n",
" switch 50 0.56 0.76\n",
" syringe 50 0.62 0.82\n",
" table lamp 50 0.6 0.88\n",
" tank 50 0.8 0.96\n",
" tape player 50 0.46 0.76\n",
" teapot 50 0.84 1\n",
" teddy bear 50 0.82 0.94\n",
" television 50 0.6 0.9\n",
" tennis ball 50 0.7 0.94\n",
" thatched roof 50 0.88 0.9\n",
" front curtain 50 0.8 0.92\n",
" thimble 50 0.6 0.8\n",
" threshing machine 50 0.56 0.88\n",
" throne 50 0.72 0.82\n",
" tile roof 50 0.72 0.94\n",
" toaster 50 0.66 0.84\n",
" tobacco shop 50 0.42 0.7\n",
" toilet seat 50 0.62 0.88\n",
" torch 50 0.64 0.84\n",
" totem pole 50 0.92 0.98\n",
" tow truck 50 0.62 0.88\n",
" toy store 50 0.6 0.94\n",
" tractor 50 0.76 0.98\n",
" semi-trailer truck 50 0.78 0.92\n",
" tray 50 0.46 0.64\n",
" trench coat 50 0.54 0.72\n",
" tricycle 50 0.72 0.94\n",
" trimaran 50 0.7 0.98\n",
" tripod 50 0.58 0.86\n",
" triumphal arch 50 0.92 0.98\n",
" trolleybus 50 0.9 1\n",
" trombone 50 0.54 0.88\n",
" tub 50 0.24 0.82\n",
" turnstile 50 0.84 0.94\n",
" typewriter keyboard 50 0.68 0.98\n",
" umbrella 50 0.52 0.7\n",
" unicycle 50 0.74 0.96\n",
" upright piano 50 0.76 0.9\n",
" vacuum cleaner 50 0.62 0.9\n",
" vase 50 0.5 0.78\n",
" vault 50 0.76 0.92\n",
" velvet 50 0.2 0.42\n",
" vending machine 50 0.9 1\n",
" vestment 50 0.54 0.82\n",
" viaduct 50 0.78 0.86\n",
" violin 50 0.68 0.78\n",
" volleyball 50 0.86 1\n",
" waffle iron 50 0.72 0.88\n",
" wall clock 50 0.54 0.88\n",
" wallet 50 0.52 0.9\n",
" wardrobe 50 0.68 0.88\n",
" military aircraft 50 0.9 0.98\n",
" sink 50 0.72 0.96\n",
" washing machine 50 0.78 0.94\n",
" water bottle 50 0.54 0.74\n",
" water jug 50 0.22 0.74\n",
" water tower 50 0.9 0.96\n",
" whiskey jug 50 0.64 0.74\n",
" whistle 50 0.72 0.84\n",
" wig 50 0.84 0.9\n",
" window screen 50 0.68 0.8\n",
" window shade 50 0.52 0.76\n",
" Windsor tie 50 0.22 0.66\n",
" wine bottle 50 0.42 0.82\n",
" wing 50 0.54 0.96\n",
" wok 50 0.46 0.82\n",
" wooden spoon 50 0.58 0.8\n",
" wool 50 0.32 0.82\n",
" split-rail fence 50 0.74 0.9\n",
" shipwreck 50 0.84 0.96\n",
" yawl 50 0.78 0.96\n",
" yurt 50 0.84 1\n",
" website 50 0.98 1\n",
" comic book 50 0.62 0.9\n",
" crossword 50 0.84 0.88\n",
" traffic sign 50 0.78 0.9\n",
" traffic light 50 0.8 0.94\n",
" dust jacket 50 0.72 0.94\n",
" menu 50 0.82 0.96\n",
" plate 50 0.44 0.88\n",
" guacamole 50 0.8 0.92\n",
" consomme 50 0.54 0.88\n",
" hot pot 50 0.86 0.98\n",
" trifle 50 0.92 0.98\n",
" ice cream 50 0.68 0.94\n",
" ice pop 50 0.62 0.84\n",
" baguette 50 0.62 0.88\n",
" bagel 50 0.64 0.92\n",
" pretzel 50 0.72 0.88\n",
" cheeseburger 50 0.9 1\n",
" hot dog 50 0.74 0.94\n",
" mashed potato 50 0.74 0.9\n",
" cabbage 50 0.84 0.96\n",
" broccoli 50 0.9 0.96\n",
" cauliflower 50 0.82 1\n",
" zucchini 50 0.74 0.9\n",
" spaghetti squash 50 0.8 0.96\n",
" acorn squash 50 0.82 0.96\n",
" butternut squash 50 0.7 0.94\n",
" cucumber 50 0.6 0.96\n",
" artichoke 50 0.84 0.94\n",
" bell pepper 50 0.84 0.98\n",
" cardoon 50 0.88 0.94\n",
" mushroom 50 0.38 0.92\n",
" Granny Smith 50 0.9 0.96\n",
" strawberry 50 0.6 0.88\n",
" orange 50 0.7 0.92\n",
" lemon 50 0.78 0.98\n",
" fig 50 0.82 0.96\n",
" pineapple 50 0.86 0.96\n",
" banana 50 0.84 0.96\n",
" jackfruit 50 0.9 0.98\n",
" custard apple 50 0.86 0.96\n",
" pomegranate 50 0.82 0.98\n",
" hay 50 0.8 0.92\n",
" carbonara 50 0.88 0.94\n",
" chocolate syrup 50 0.46 0.84\n",
" dough 50 0.4 0.6\n",
" meatloaf 50 0.58 0.84\n",
" pizza 50 0.84 0.96\n",
" pot pie 50 0.68 0.9\n",
" burrito 50 0.8 0.98\n",
" red wine 50 0.54 0.82\n",
" espresso 50 0.64 0.88\n",
" cup 50 0.38 0.7\n",
" eggnog 50 0.38 0.7\n",
" alp 50 0.54 0.88\n",
" bubble 50 0.8 0.96\n",
" cliff 50 0.64 1\n",
" coral reef 50 0.72 0.96\n",
" geyser 50 0.94 1\n",
" lakeshore 50 0.54 0.88\n",
" promontory 50 0.58 0.94\n",
" shoal 50 0.6 0.96\n",
" seashore 50 0.44 0.78\n",
" valley 50 0.72 0.94\n",
" volcano 50 0.78 0.96\n",
" baseball player 50 0.72 0.94\n",
" bridegroom 50 0.72 0.88\n",
" scuba diver 50 0.8 1\n",
" rapeseed 50 0.94 0.98\n",
" daisy 50 0.96 0.98\n",
" yellow lady's slipper 50 1 1\n",
" corn 50 0.4 0.88\n",
" acorn 50 0.92 0.98\n",
" rose hip 50 0.92 0.98\n",
" horse chestnut seed 50 0.94 0.98\n",
" coral fungus 50 0.96 0.96\n",
" agaric 50 0.82 0.94\n",
" gyromitra 50 0.98 1\n",
" stinkhorn mushroom 50 0.8 0.94\n",
" earth star 50 0.98 1\n",
" hen-of-the-woods 50 0.8 0.96\n",
" bolete 50 0.74 0.94\n",
" ear 50 0.48 0.94\n",
" toilet paper 50 0.36 0.68\n",
"Speed: 0.1ms pre-process, 0.3ms inference, 0.0ms post-process per image at shape (1, 3, 224, 224)\n",
"Results saved to \u001b[1mruns/val-cls/exp\u001b[0m\n"
]
}
],
"source": [
"# Validate YOLOv5s on Imagenet val\n",
"!python classify/val.py --weights yolov5s-cls.pt --data ../datasets/imagenet --img 224 --half"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "ZY2VXXXu74w5"
},
"source": [
"# 3. Train\n",
"\n",
"
"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "0eq1SMWl6Sfn"
},
"source": [
"# 2. Validate\n",
"Validate a model's accuracy on the [Imagenet](https://image-net.org/) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"colab": {
"base_uri": "https://localhost:8080/"
},
"id": "WQPtK1QYVaD_",
"outputId": "20fc0630-141e-4a90-ea06-342cbd7ce496"
},
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"--2022-11-22 19:53:40-- https://image-net.org/data/ILSVRC/2012/ILSVRC2012_img_val.tar\n",
"Resolving image-net.org (image-net.org)... 171.64.68.16\n",
"Connecting to image-net.org (image-net.org)|171.64.68.16|:443... connected.\n",
"HTTP request sent, awaiting response... 200 OK\n",
"Length: 6744924160 (6.3G) [application/x-tar]\n",
"Saving to: ‘ILSVRC2012_img_val.tar’\n",
"\n",
"ILSVRC2012_img_val. 100%[===================>] 6.28G 16.1MB/s in 10m 52s \n",
"\n",
"2022-11-22 20:04:32 (9.87 MB/s) - ‘ILSVRC2012_img_val.tar’ saved [6744924160/6744924160]\n",
"\n"
]
}
],
"source": [
"# Download Imagenet val (6.3G, 50000 images)\n",
"!bash data/scripts/get_imagenet.sh --val"
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"colab": {
"base_uri": "https://localhost:8080/"
},
"id": "X58w8JLpMnjH",
"outputId": "41843132-98e2-4c25-d474-4cd7b246fb8e"
},
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"\u001b[34m\u001b[1mclassify/val: \u001b[0mdata=../datasets/imagenet, weights=['yolov5s-cls.pt'], batch_size=128, imgsz=224, device=, workers=8, verbose=True, project=runs/val-cls, name=exp, exist_ok=False, half=True, dnn=False\n",
"YOLOv5 🚀 v7.0-3-g61ebf5e Python-3.7.15 torch-1.12.1+cu113 CUDA:0 (Tesla T4, 15110MiB)\n",
"\n",
"Fusing layers... \n",
"Model summary: 117 layers, 5447688 parameters, 0 gradients, 11.4 GFLOPs\n",
"validating: 100% 391/391 [04:57<00:00, 1.31it/s]\n",
" Class Images top1_acc top5_acc\n",
" all 50000 0.715 0.902\n",
" tench 50 0.94 0.98\n",
" goldfish 50 0.88 0.92\n",
" great white shark 50 0.78 0.96\n",
" tiger shark 50 0.68 0.96\n",
" hammerhead shark 50 0.82 0.92\n",
" electric ray 50 0.76 0.9\n",
" stingray 50 0.7 0.9\n",
" cock 50 0.78 0.92\n",
" hen 50 0.84 0.96\n",
" ostrich 50 0.98 1\n",
" brambling 50 0.9 0.96\n",
" goldfinch 50 0.92 0.98\n",
" house finch 50 0.88 0.96\n",
" junco 50 0.94 0.98\n",
" indigo bunting 50 0.86 0.88\n",
" American robin 50 0.9 0.96\n",
" bulbul 50 0.84 0.96\n",
" jay 50 0.9 0.96\n",
" magpie 50 0.84 0.96\n",
" chickadee 50 0.9 1\n",
" American dipper 50 0.82 0.92\n",
" kite 50 0.76 0.94\n",
" bald eagle 50 0.92 1\n",
" vulture 50 0.96 1\n",
" great grey owl 50 0.94 0.98\n",
" fire salamander 50 0.96 0.98\n",
" smooth newt 50 0.58 0.94\n",
" newt 50 0.74 0.9\n",
" spotted salamander 50 0.86 0.94\n",
" axolotl 50 0.86 0.96\n",
" American bullfrog 50 0.78 0.92\n",
" tree frog 50 0.84 0.96\n",
" tailed frog 50 0.48 0.8\n",
" loggerhead sea turtle 50 0.68 0.94\n",
" leatherback sea turtle 50 0.5 0.8\n",
" mud turtle 50 0.64 0.84\n",
" terrapin 50 0.52 0.98\n",
" box turtle 50 0.84 0.98\n",
" banded gecko 50 0.7 0.88\n",
" green iguana 50 0.76 0.94\n",
" Carolina anole 50 0.58 0.96\n",
"desert grassland whiptail lizard 50 0.82 0.94\n",
" agama 50 0.74 0.92\n",
" frilled-necked lizard 50 0.84 0.86\n",
" alligator lizard 50 0.58 0.78\n",
" Gila monster 50 0.72 0.8\n",
" European green lizard 50 0.42 0.9\n",
" chameleon 50 0.76 0.84\n",
" Komodo dragon 50 0.86 0.96\n",
" Nile crocodile 50 0.7 0.84\n",
" American alligator 50 0.76 0.96\n",
" triceratops 50 0.9 0.94\n",
" worm snake 50 0.76 0.88\n",
" ring-necked snake 50 0.8 0.92\n",
" eastern hog-nosed snake 50 0.58 0.88\n",
" smooth green snake 50 0.6 0.94\n",
" kingsnake 50 0.82 0.9\n",
" garter snake 50 0.88 0.94\n",
" water snake 50 0.7 0.94\n",
" vine snake 50 0.66 0.76\n",
" night snake 50 0.34 0.82\n",
" boa constrictor 50 0.8 0.96\n",
" African rock python 50 0.48 0.76\n",
" Indian cobra 50 0.82 0.94\n",
" green mamba 50 0.54 0.86\n",
" sea snake 50 0.62 0.9\n",
" Saharan horned viper 50 0.56 0.86\n",
"eastern diamondback rattlesnake 50 0.6 0.86\n",
" sidewinder 50 0.28 0.86\n",
" trilobite 50 0.98 0.98\n",
" harvestman 50 0.86 0.94\n",
" scorpion 50 0.86 0.94\n",
" yellow garden spider 50 0.92 0.96\n",
" barn spider 50 0.38 0.98\n",
" European garden spider 50 0.62 0.98\n",
" southern black widow 50 0.88 0.94\n",
" tarantula 50 0.94 1\n",
" wolf spider 50 0.82 0.92\n",
" tick 50 0.74 0.84\n",
" centipede 50 0.68 0.82\n",
" black grouse 50 0.88 0.98\n",
" ptarmigan 50 0.78 0.94\n",
" ruffed grouse 50 0.88 1\n",
" prairie grouse 50 0.92 1\n",
" peacock 50 0.88 0.9\n",
" quail 50 0.9 0.94\n",
" partridge 50 0.74 0.96\n",
" grey parrot 50 0.9 0.96\n",
" macaw 50 0.88 0.98\n",
"sulphur-crested cockatoo 50 0.86 0.92\n",
" lorikeet 50 0.96 1\n",
" coucal 50 0.82 0.88\n",
" bee eater 50 0.96 0.98\n",
" hornbill 50 0.9 0.96\n",
" hummingbird 50 0.88 0.96\n",
" jacamar 50 0.92 0.94\n",
" toucan 50 0.84 0.94\n",
" duck 50 0.76 0.94\n",
" red-breasted merganser 50 0.86 0.96\n",
" goose 50 0.74 0.96\n",
" black swan 50 0.94 0.98\n",
" tusker 50 0.54 0.92\n",
" echidna 50 0.98 1\n",
" platypus 50 0.72 0.84\n",
" wallaby 50 0.78 0.88\n",
" koala 50 0.84 0.92\n",
" wombat 50 0.78 0.84\n",
" jellyfish 50 0.88 0.96\n",
" sea anemone 50 0.72 0.9\n",
" brain coral 50 0.88 0.96\n",
" flatworm 50 0.8 0.98\n",
" nematode 50 0.86 0.9\n",
" conch 50 0.74 0.88\n",
" snail 50 0.78 0.88\n",
" slug 50 0.74 0.82\n",
" sea slug 50 0.88 0.98\n",
" chiton 50 0.88 0.98\n",
" chambered nautilus 50 0.88 0.92\n",
" Dungeness crab 50 0.78 0.94\n",
" rock crab 50 0.68 0.86\n",
" fiddler crab 50 0.64 0.86\n",
" red king crab 50 0.76 0.96\n",
" American lobster 50 0.78 0.96\n",
" spiny lobster 50 0.74 0.88\n",
" crayfish 50 0.56 0.86\n",
" hermit crab 50 0.78 0.96\n",
" isopod 50 0.66 0.78\n",
" white stork 50 0.88 0.96\n",
" black stork 50 0.84 0.98\n",
" spoonbill 50 0.96 1\n",
" flamingo 50 0.94 1\n",
" little blue heron 50 0.92 0.98\n",
" great egret 50 0.9 0.96\n",
" bittern 50 0.86 0.94\n",
" crane (bird) 50 0.62 0.9\n",
" limpkin 50 0.98 1\n",
" common gallinule 50 0.92 0.96\n",
" American coot 50 0.9 0.98\n",
" bustard 50 0.92 0.96\n",
" ruddy turnstone 50 0.94 1\n",
" dunlin 50 0.86 0.94\n",
" common redshank 50 0.9 0.96\n",
" dowitcher 50 0.84 0.96\n",
" oystercatcher 50 0.86 0.94\n",
" pelican 50 0.92 0.96\n",
" king penguin 50 0.88 0.96\n",
" albatross 50 0.9 1\n",
" grey whale 50 0.84 0.92\n",
" killer whale 50 0.92 1\n",
" dugong 50 0.84 0.96\n",
" sea lion 50 0.82 0.92\n",
" Chihuahua 50 0.66 0.84\n",
" Japanese Chin 50 0.72 0.98\n",
" Maltese 50 0.76 0.94\n",
" Pekingese 50 0.84 0.94\n",
" Shih Tzu 50 0.74 0.96\n",
" King Charles Spaniel 50 0.88 0.98\n",
" Papillon 50 0.86 0.94\n",
" toy terrier 50 0.48 0.94\n",
" Rhodesian Ridgeback 50 0.76 0.98\n",
" Afghan Hound 50 0.84 1\n",
" Basset Hound 50 0.8 0.92\n",
" Beagle 50 0.82 0.96\n",
" Bloodhound 50 0.48 0.72\n",
" Bluetick Coonhound 50 0.86 0.94\n",
" Black and Tan Coonhound 50 0.54 0.8\n",
"Treeing Walker Coonhound 50 0.66 0.98\n",
" English foxhound 50 0.32 0.84\n",
" Redbone Coonhound 50 0.62 0.94\n",
" borzoi 50 0.92 1\n",
" Irish Wolfhound 50 0.48 0.88\n",
" Italian Greyhound 50 0.76 0.98\n",
" Whippet 50 0.74 0.92\n",
" Ibizan Hound 50 0.6 0.86\n",
" Norwegian Elkhound 50 0.88 0.98\n",
" Otterhound 50 0.62 0.9\n",
" Saluki 50 0.72 0.92\n",
" Scottish Deerhound 50 0.86 0.98\n",
" Weimaraner 50 0.88 0.94\n",
"Staffordshire Bull Terrier 50 0.66 0.98\n",
"American Staffordshire Terrier 50 0.64 0.92\n",
" Bedlington Terrier 50 0.9 0.92\n",
" Border Terrier 50 0.86 0.92\n",
" Kerry Blue Terrier 50 0.78 0.98\n",
" Irish Terrier 50 0.7 0.96\n",
" Norfolk Terrier 50 0.68 0.9\n",
" Norwich Terrier 50 0.72 1\n",
" Yorkshire Terrier 50 0.66 0.9\n",
" Wire Fox Terrier 50 0.64 0.98\n",
" Lakeland Terrier 50 0.74 0.92\n",
" Sealyham Terrier 50 0.76 0.9\n",
" Airedale Terrier 50 0.82 0.92\n",
" Cairn Terrier 50 0.76 0.9\n",
" Australian Terrier 50 0.48 0.84\n",
" Dandie Dinmont Terrier 50 0.82 0.92\n",
" Boston Terrier 50 0.92 1\n",
" Miniature Schnauzer 50 0.68 0.9\n",
" Giant Schnauzer 50 0.72 0.98\n",
" Standard Schnauzer 50 0.74 1\n",
" Scottish Terrier 50 0.76 0.96\n",
" Tibetan Terrier 50 0.48 1\n",
"Australian Silky Terrier 50 0.66 0.96\n",
"Soft-coated Wheaten Terrier 50 0.74 0.96\n",
"West Highland White Terrier 50 0.88 0.96\n",
" Lhasa Apso 50 0.68 0.96\n",
" Flat-Coated Retriever 50 0.72 0.94\n",
" Curly-coated Retriever 50 0.82 0.94\n",
" Golden Retriever 50 0.86 0.94\n",
" Labrador Retriever 50 0.82 0.94\n",
"Chesapeake Bay Retriever 50 0.76 0.96\n",
"German Shorthaired Pointer 50 0.8 0.96\n",
" Vizsla 50 0.68 0.96\n",
" English Setter 50 0.7 1\n",
" Irish Setter 50 0.8 0.9\n",
" Gordon Setter 50 0.84 0.92\n",
" Brittany 50 0.84 0.96\n",
" Clumber Spaniel 50 0.92 0.96\n",
"English Springer Spaniel 50 0.88 1\n",
" Welsh Springer Spaniel 50 0.92 1\n",
" Cocker Spaniels 50 0.7 0.94\n",
" Sussex Spaniel 50 0.72 0.92\n",
" Irish Water Spaniel 50 0.88 0.98\n",
" Kuvasz 50 0.66 0.9\n",
" Schipperke 50 0.9 0.98\n",
" Groenendael 50 0.8 0.94\n",
" Malinois 50 0.86 0.98\n",
" Briard 50 0.52 0.8\n",
" Australian Kelpie 50 0.6 0.88\n",
" Komondor 50 0.88 0.94\n",
" Old English Sheepdog 50 0.94 0.98\n",
" Shetland Sheepdog 50 0.74 0.9\n",
" collie 50 0.6 0.96\n",
" Border Collie 50 0.74 0.96\n",
" Bouvier des Flandres 50 0.78 0.94\n",
" Rottweiler 50 0.88 0.96\n",
" German Shepherd Dog 50 0.8 0.98\n",
" Dobermann 50 0.68 0.96\n",
" Miniature Pinscher 50 0.76 0.88\n",
"Greater Swiss Mountain Dog 50 0.68 0.94\n",
" Bernese Mountain Dog 50 0.96 1\n",
" Appenzeller Sennenhund 50 0.22 1\n",
" Entlebucher Sennenhund 50 0.64 0.98\n",
" Boxer 50 0.7 0.92\n",
" Bullmastiff 50 0.78 0.98\n",
" Tibetan Mastiff 50 0.88 0.96\n",
" French Bulldog 50 0.84 0.94\n",
" Great Dane 50 0.54 0.9\n",
" St. Bernard 50 0.92 1\n",
" husky 50 0.46 0.98\n",
" Alaskan Malamute 50 0.76 0.96\n",
" Siberian Husky 50 0.46 0.98\n",
" Dalmatian 50 0.94 0.98\n",
" Affenpinscher 50 0.78 0.9\n",
" Basenji 50 0.92 0.94\n",
" pug 50 0.94 0.98\n",
" Leonberger 50 1 1\n",
" Newfoundland 50 0.78 0.96\n",
" Pyrenean Mountain Dog 50 0.78 0.96\n",
" Samoyed 50 0.96 1\n",
" Pomeranian 50 0.98 1\n",
" Chow Chow 50 0.9 0.96\n",
" Keeshond 50 0.88 0.94\n",
" Griffon Bruxellois 50 0.84 0.98\n",
" Pembroke Welsh Corgi 50 0.82 0.94\n",
" Cardigan Welsh Corgi 50 0.66 0.98\n",
" Toy Poodle 50 0.52 0.88\n",
" Miniature Poodle 50 0.52 0.92\n",
" Standard Poodle 50 0.8 1\n",
" Mexican hairless dog 50 0.88 0.98\n",
" grey wolf 50 0.82 0.92\n",
" Alaskan tundra wolf 50 0.78 0.98\n",
" red wolf 50 0.48 0.9\n",
" coyote 50 0.64 0.86\n",
" dingo 50 0.76 0.88\n",
" dhole 50 0.9 0.98\n",
" African wild dog 50 0.98 1\n",
" hyena 50 0.88 0.96\n",
" red fox 50 0.54 0.92\n",
" kit fox 50 0.72 0.98\n",
" Arctic fox 50 0.94 1\n",
" grey fox 50 0.7 0.94\n",
" tabby cat 50 0.54 0.92\n",
" tiger cat 50 0.22 0.94\n",
" Persian cat 50 0.9 0.98\n",
" Siamese cat 50 0.96 1\n",
" Egyptian Mau 50 0.54 0.8\n",
" cougar 50 0.9 1\n",
" lynx 50 0.72 0.88\n",
" leopard 50 0.78 0.98\n",
" snow leopard 50 0.9 0.98\n",
" jaguar 50 0.7 0.94\n",
" lion 50 0.9 0.98\n",
" tiger 50 0.92 0.98\n",
" cheetah 50 0.94 0.98\n",
" brown bear 50 0.94 0.98\n",
" American black bear 50 0.8 1\n",
" polar bear 50 0.84 0.96\n",
" sloth bear 50 0.72 0.92\n",
" mongoose 50 0.7 0.92\n",
" meerkat 50 0.82 0.92\n",
" tiger beetle 50 0.92 0.94\n",
" ladybug 50 0.86 0.94\n",
" ground beetle 50 0.64 0.94\n",
" longhorn beetle 50 0.62 0.88\n",
" leaf beetle 50 0.64 0.98\n",
" dung beetle 50 0.86 0.98\n",
" rhinoceros beetle 50 0.86 0.94\n",
" weevil 50 0.9 1\n",
" fly 50 0.78 0.94\n",
" bee 50 0.68 0.94\n",
" ant 50 0.68 0.78\n",
" grasshopper 50 0.5 0.92\n",
" cricket 50 0.64 0.92\n",
" stick insect 50 0.64 0.92\n",
" cockroach 50 0.72 0.8\n",
" mantis 50 0.64 0.86\n",
" cicada 50 0.9 0.96\n",
" leafhopper 50 0.88 0.94\n",
" lacewing 50 0.78 0.92\n",
" dragonfly 50 0.82 0.98\n",
" damselfly 50 0.82 1\n",
" red admiral 50 0.94 0.96\n",
" ringlet 50 0.86 0.98\n",
" monarch butterfly 50 0.9 0.92\n",
" small white 50 0.9 1\n",
" sulphur butterfly 50 0.92 1\n",
"gossamer-winged butterfly 50 0.88 1\n",
" starfish 50 0.88 0.92\n",
" sea urchin 50 0.84 0.94\n",
" sea cucumber 50 0.66 0.84\n",
" cottontail rabbit 50 0.72 0.94\n",
" hare 50 0.84 0.96\n",
" Angora rabbit 50 0.94 0.98\n",
" hamster 50 0.96 1\n",
" porcupine 50 0.88 0.98\n",
" fox squirrel 50 0.76 0.94\n",
" marmot 50 0.92 0.96\n",
" beaver 50 0.78 0.94\n",
" guinea pig 50 0.78 0.94\n",
" common sorrel 50 0.96 0.98\n",
" zebra 50 0.94 0.96\n",
" pig 50 0.5 0.76\n",
" wild boar 50 0.84 0.96\n",
" warthog 50 0.84 0.96\n",
" hippopotamus 50 0.88 0.96\n",
" ox 50 0.48 0.94\n",
" water buffalo 50 0.78 0.94\n",
" bison 50 0.88 0.96\n",
" ram 50 0.58 0.92\n",
" bighorn sheep 50 0.66 1\n",
" Alpine ibex 50 0.92 0.98\n",
" hartebeest 50 0.94 1\n",
" impala 50 0.82 0.96\n",
" gazelle 50 0.7 0.96\n",
" dromedary 50 0.9 1\n",
" llama 50 0.82 0.94\n",
" weasel 50 0.44 0.92\n",
" mink 50 0.78 0.96\n",
" European polecat 50 0.46 0.9\n",
" black-footed ferret 50 0.68 0.96\n",
" otter 50 0.66 0.88\n",
" skunk 50 0.96 0.96\n",
" badger 50 0.86 0.92\n",
" armadillo 50 0.88 0.9\n",
" three-toed sloth 50 0.96 1\n",
" orangutan 50 0.78 0.92\n",
" gorilla 50 0.82 0.94\n",
" chimpanzee 50 0.84 0.94\n",
" gibbon 50 0.76 0.86\n",
" siamang 50 0.68 0.94\n",
" guenon 50 0.8 0.94\n",
" patas monkey 50 0.62 0.82\n",
" baboon 50 0.9 0.98\n",
" macaque 50 0.8 0.86\n",
" langur 50 0.6 0.82\n",
" black-and-white colobus 50 0.86 0.9\n",
" proboscis monkey 50 1 1\n",
" marmoset 50 0.74 0.98\n",
" white-headed capuchin 50 0.72 0.9\n",
" howler monkey 50 0.86 0.94\n",
" titi 50 0.5 0.9\n",
"Geoffroy's spider monkey 50 0.42 0.8\n",
" common squirrel monkey 50 0.76 0.92\n",
" ring-tailed lemur 50 0.72 0.94\n",
" indri 50 0.9 0.96\n",
" Asian elephant 50 0.58 0.92\n",
" African bush elephant 50 0.7 0.98\n",
" red panda 50 0.94 0.94\n",
" giant panda 50 0.94 0.98\n",
" snoek 50 0.74 0.9\n",
" eel 50 0.6 0.84\n",
" coho salmon 50 0.84 0.96\n",
" rock beauty 50 0.88 0.98\n",
" clownfish 50 0.78 0.98\n",
" sturgeon 50 0.68 0.94\n",
" garfish 50 0.62 0.8\n",
" lionfish 50 0.96 0.96\n",
" pufferfish 50 0.88 0.96\n",
" abacus 50 0.74 0.88\n",
" abaya 50 0.84 0.92\n",
" academic gown 50 0.42 0.86\n",
" accordion 50 0.8 0.9\n",
" acoustic guitar 50 0.5 0.76\n",
" aircraft carrier 50 0.8 0.96\n",
" airliner 50 0.92 1\n",
" airship 50 0.76 0.82\n",
" altar 50 0.64 0.98\n",
" ambulance 50 0.88 0.98\n",
" amphibious vehicle 50 0.64 0.94\n",
" analog clock 50 0.52 0.92\n",
" apiary 50 0.82 0.96\n",
" apron 50 0.7 0.84\n",
" waste container 50 0.4 0.8\n",
" assault rifle 50 0.42 0.84\n",
" backpack 50 0.34 0.64\n",
" bakery 50 0.4 0.68\n",
" balance beam 50 0.8 0.98\n",
" balloon 50 0.86 0.96\n",
" ballpoint pen 50 0.52 0.96\n",
" Band-Aid 50 0.7 0.9\n",
" banjo 50 0.84 1\n",
" baluster 50 0.68 0.94\n",
" barbell 50 0.56 0.9\n",
" barber chair 50 0.7 0.92\n",
" barbershop 50 0.54 0.86\n",
" barn 50 0.96 0.96\n",
" barometer 50 0.84 0.98\n",
" barrel 50 0.56 0.88\n",
" wheelbarrow 50 0.66 0.88\n",
" baseball 50 0.74 0.98\n",
" basketball 50 0.88 0.98\n",
" bassinet 50 0.66 0.92\n",
" bassoon 50 0.74 0.98\n",
" swimming cap 50 0.62 0.88\n",
" bath towel 50 0.54 0.78\n",
" bathtub 50 0.4 0.88\n",
" station wagon 50 0.66 0.84\n",
" lighthouse 50 0.78 0.94\n",
" beaker 50 0.52 0.68\n",
" military cap 50 0.84 0.96\n",
" beer bottle 50 0.66 0.88\n",
" beer glass 50 0.6 0.84\n",
" bell-cot 50 0.56 0.96\n",
" bib 50 0.58 0.82\n",
" tandem bicycle 50 0.86 0.96\n",
" bikini 50 0.56 0.88\n",
" ring binder 50 0.64 0.84\n",
" binoculars 50 0.54 0.78\n",
" birdhouse 50 0.86 0.94\n",
" boathouse 50 0.74 0.92\n",
" bobsleigh 50 0.92 0.96\n",
" bolo tie 50 0.8 0.94\n",
" poke bonnet 50 0.64 0.86\n",
" bookcase 50 0.66 0.92\n",
" bookstore 50 0.62 0.88\n",
" bottle cap 50 0.58 0.7\n",
" bow 50 0.72 0.86\n",
" bow tie 50 0.7 0.9\n",
" brass 50 0.92 0.96\n",
" bra 50 0.5 0.7\n",
" breakwater 50 0.62 0.86\n",
" breastplate 50 0.4 0.9\n",
" broom 50 0.6 0.86\n",
" bucket 50 0.66 0.8\n",
" buckle 50 0.5 0.68\n",
" bulletproof vest 50 0.5 0.78\n",
" high-speed train 50 0.94 0.96\n",
" butcher shop 50 0.74 0.94\n",
" taxicab 50 0.64 0.86\n",
" cauldron 50 0.44 0.66\n",
" candle 50 0.48 0.74\n",
" cannon 50 0.88 0.94\n",
" canoe 50 0.94 1\n",
" can opener 50 0.66 0.86\n",
" cardigan 50 0.68 0.8\n",
" car mirror 50 0.94 0.96\n",
" carousel 50 0.94 0.98\n",
" tool kit 50 0.56 0.78\n",
" carton 50 0.42 0.7\n",
" car wheel 50 0.38 0.74\n",
"automated teller machine 50 0.76 0.94\n",
" cassette 50 0.52 0.8\n",
" cassette player 50 0.28 0.9\n",
" castle 50 0.78 0.88\n",
" catamaran 50 0.78 1\n",
" CD player 50 0.52 0.82\n",
" cello 50 0.82 1\n",
" mobile phone 50 0.68 0.86\n",
" chain 50 0.38 0.66\n",
" chain-link fence 50 0.7 0.84\n",
" chain mail 50 0.64 0.9\n",
" chainsaw 50 0.84 0.92\n",
" chest 50 0.68 0.92\n",
" chiffonier 50 0.26 0.64\n",
" chime 50 0.62 0.84\n",
" china cabinet 50 0.82 0.96\n",
" Christmas stocking 50 0.92 0.94\n",
" church 50 0.62 0.9\n",
" movie theater 50 0.58 0.88\n",
" cleaver 50 0.32 0.62\n",
" cliff dwelling 50 0.88 1\n",
" cloak 50 0.32 0.64\n",
" clogs 50 0.58 0.88\n",
" cocktail shaker 50 0.62 0.7\n",
" coffee mug 50 0.44 0.72\n",
" coffeemaker 50 0.64 0.92\n",
" coil 50 0.66 0.84\n",
" combination lock 50 0.64 0.84\n",
" computer keyboard 50 0.7 0.82\n",
" confectionery store 50 0.54 0.86\n",
" container ship 50 0.82 0.98\n",
" convertible 50 0.78 0.98\n",
" corkscrew 50 0.82 0.92\n",
" cornet 50 0.46 0.88\n",
" cowboy boot 50 0.64 0.8\n",
" cowboy hat 50 0.64 0.82\n",
" cradle 50 0.38 0.8\n",
" crane (machine) 50 0.78 0.94\n",
" crash helmet 50 0.92 0.96\n",
" crate 50 0.52 0.82\n",
" infant bed 50 0.74 1\n",
" Crock Pot 50 0.78 0.9\n",
" croquet ball 50 0.9 0.96\n",
" crutch 50 0.46 0.7\n",
" cuirass 50 0.54 0.86\n",
" dam 50 0.74 0.92\n",
" desk 50 0.6 0.86\n",
" desktop computer 50 0.54 0.94\n",
" rotary dial telephone 50 0.88 0.94\n",
" diaper 50 0.68 0.84\n",
" digital clock 50 0.54 0.76\n",
" digital watch 50 0.58 0.86\n",
" dining table 50 0.76 0.9\n",
" dishcloth 50 0.94 1\n",
" dishwasher 50 0.44 0.78\n",
" disc brake 50 0.98 1\n",
" dock 50 0.54 0.94\n",
" dog sled 50 0.84 1\n",
" dome 50 0.72 0.92\n",
" doormat 50 0.56 0.82\n",
" drilling rig 50 0.84 0.96\n",
" drum 50 0.38 0.68\n",
" drumstick 50 0.56 0.72\n",
" dumbbell 50 0.62 0.9\n",
" Dutch oven 50 0.7 0.84\n",
" electric fan 50 0.82 0.86\n",
" electric guitar 50 0.62 0.84\n",
" electric locomotive 50 0.92 0.98\n",
" entertainment center 50 0.9 0.98\n",
" envelope 50 0.44 0.86\n",
" espresso machine 50 0.72 0.94\n",
" face powder 50 0.7 0.92\n",
" feather boa 50 0.7 0.84\n",
" filing cabinet 50 0.88 0.98\n",
" fireboat 50 0.94 0.98\n",
" fire engine 50 0.84 0.9\n",
" fire screen sheet 50 0.62 0.76\n",
" flagpole 50 0.74 0.88\n",
" flute 50 0.36 0.72\n",
" folding chair 50 0.62 0.84\n",
" football helmet 50 0.86 0.94\n",
" forklift 50 0.8 0.92\n",
" fountain 50 0.84 0.94\n",
" fountain pen 50 0.76 0.92\n",
" four-poster bed 50 0.78 0.94\n",
" freight car 50 0.96 1\n",
" French horn 50 0.76 0.92\n",
" frying pan 50 0.36 0.78\n",
" fur coat 50 0.84 0.96\n",
" garbage truck 50 0.9 0.98\n",
" gas mask 50 0.84 0.92\n",
" gas pump 50 0.9 0.98\n",
" goblet 50 0.68 0.82\n",
" go-kart 50 0.9 1\n",
" golf ball 50 0.84 0.9\n",
" golf cart 50 0.78 0.86\n",
" gondola 50 0.98 0.98\n",
" gong 50 0.74 0.92\n",
" gown 50 0.62 0.96\n",
" grand piano 50 0.7 0.96\n",
" greenhouse 50 0.8 0.98\n",
" grille 50 0.72 0.9\n",
" grocery store 50 0.66 0.94\n",
" guillotine 50 0.86 0.92\n",
" barrette 50 0.52 0.66\n",
" hair spray 50 0.5 0.74\n",
" half-track 50 0.78 0.9\n",
" hammer 50 0.56 0.76\n",
" hamper 50 0.64 0.84\n",
" hair dryer 50 0.56 0.74\n",
" hand-held computer 50 0.42 0.86\n",
" handkerchief 50 0.78 0.94\n",
" hard disk drive 50 0.76 0.84\n",
" harmonica 50 0.7 0.88\n",
" harp 50 0.88 0.96\n",
" harvester 50 0.78 1\n",
" hatchet 50 0.54 0.74\n",
" holster 50 0.66 0.84\n",
" home theater 50 0.64 0.94\n",
" honeycomb 50 0.56 0.88\n",
" hook 50 0.3 0.6\n",
" hoop skirt 50 0.64 0.86\n",
" horizontal bar 50 0.68 0.98\n",
" horse-drawn vehicle 50 0.88 0.94\n",
" hourglass 50 0.88 0.96\n",
" iPod 50 0.76 0.94\n",
" clothes iron 50 0.82 0.88\n",
" jack-o'-lantern 50 0.98 0.98\n",
" jeans 50 0.68 0.84\n",
" jeep 50 0.72 0.9\n",
" T-shirt 50 0.72 0.96\n",
" jigsaw puzzle 50 0.84 0.94\n",
" pulled rickshaw 50 0.86 0.94\n",
" joystick 50 0.8 0.9\n",
" kimono 50 0.84 0.96\n",
" knee pad 50 0.62 0.88\n",
" knot 50 0.66 0.8\n",
" lab coat 50 0.8 0.96\n",
" ladle 50 0.36 0.64\n",
" lampshade 50 0.48 0.84\n",
" laptop computer 50 0.26 0.88\n",
" lawn mower 50 0.78 0.96\n",
" lens cap 50 0.46 0.72\n",
" paper knife 50 0.26 0.5\n",
" library 50 0.54 0.9\n",
" lifeboat 50 0.92 0.98\n",
" lighter 50 0.56 0.78\n",
" limousine 50 0.76 0.92\n",
" ocean liner 50 0.88 0.94\n",
" lipstick 50 0.74 0.9\n",
" slip-on shoe 50 0.74 0.92\n",
" lotion 50 0.5 0.86\n",
" speaker 50 0.52 0.68\n",
" loupe 50 0.32 0.52\n",
" sawmill 50 0.72 0.9\n",
" magnetic compass 50 0.52 0.82\n",
" mail bag 50 0.68 0.92\n",
" mailbox 50 0.82 0.92\n",
" tights 50 0.22 0.94\n",
" tank suit 50 0.24 0.9\n",
" manhole cover 50 0.96 0.98\n",
" maraca 50 0.74 0.9\n",
" marimba 50 0.84 0.94\n",
" mask 50 0.44 0.82\n",
" match 50 0.66 0.9\n",
" maypole 50 0.96 1\n",
" maze 50 0.8 0.96\n",
" measuring cup 50 0.54 0.76\n",
" medicine chest 50 0.6 0.84\n",
" megalith 50 0.8 0.92\n",
" microphone 50 0.52 0.7\n",
" microwave oven 50 0.48 0.72\n",
" military uniform 50 0.62 0.84\n",
" milk can 50 0.68 0.82\n",
" minibus 50 0.7 1\n",
" miniskirt 50 0.46 0.76\n",
" minivan 50 0.38 0.8\n",
" missile 50 0.4 0.84\n",
" mitten 50 0.76 0.88\n",
" mixing bowl 50 0.8 0.92\n",
" mobile home 50 0.54 0.78\n",
" Model T 50 0.92 0.96\n",
" modem 50 0.58 0.86\n",
" monastery 50 0.44 0.9\n",
" monitor 50 0.4 0.86\n",
" moped 50 0.56 0.94\n",
" mortar 50 0.68 0.94\n",
" square academic cap 50 0.5 0.84\n",
" mosque 50 0.9 1\n",
" mosquito net 50 0.9 0.98\n",
" scooter 50 0.9 0.98\n",
" mountain bike 50 0.78 0.96\n",
" tent 50 0.88 0.96\n",
" computer mouse 50 0.42 0.82\n",
" mousetrap 50 0.76 0.88\n",
" moving van 50 0.4 0.72\n",
" muzzle 50 0.5 0.72\n",
" nail 50 0.68 0.74\n",
" neck brace 50 0.56 0.68\n",
" necklace 50 0.86 1\n",
" nipple 50 0.7 0.88\n",
" notebook computer 50 0.34 0.84\n",
" obelisk 50 0.8 0.92\n",
" oboe 50 0.6 0.84\n",
" ocarina 50 0.8 0.86\n",
" odometer 50 0.96 1\n",
" oil filter 50 0.58 0.82\n",
" organ 50 0.82 0.9\n",
" oscilloscope 50 0.9 0.96\n",
" overskirt 50 0.2 0.7\n",
" bullock cart 50 0.7 0.94\n",
" oxygen mask 50 0.46 0.84\n",
" packet 50 0.5 0.78\n",
" paddle 50 0.56 0.94\n",
" paddle wheel 50 0.86 0.96\n",
" padlock 50 0.74 0.78\n",
" paintbrush 50 0.62 0.8\n",
" pajamas 50 0.56 0.92\n",
" palace 50 0.64 0.96\n",
" pan flute 50 0.84 0.86\n",
" paper towel 50 0.66 0.84\n",
" parachute 50 0.92 0.94\n",
" parallel bars 50 0.62 0.96\n",
" park bench 50 0.74 0.9\n",
" parking meter 50 0.84 0.92\n",
" passenger car 50 0.5 0.82\n",
" patio 50 0.58 0.84\n",
" payphone 50 0.74 0.92\n",
" pedestal 50 0.52 0.9\n",
" pencil case 50 0.64 0.92\n",
" pencil sharpener 50 0.52 0.78\n",
" perfume 50 0.7 0.9\n",
" Petri dish 50 0.6 0.8\n",
" photocopier 50 0.88 0.98\n",
" plectrum 50 0.7 0.84\n",
" Pickelhaube 50 0.72 0.86\n",
" picket fence 50 0.84 0.94\n",
" pickup truck 50 0.64 0.92\n",
" pier 50 0.52 0.82\n",
" piggy bank 50 0.82 0.94\n",
" pill bottle 50 0.76 0.86\n",
" pillow 50 0.76 0.9\n",
" ping-pong ball 50 0.84 0.88\n",
" pinwheel 50 0.76 0.88\n",
" pirate ship 50 0.76 0.94\n",
" pitcher 50 0.46 0.84\n",
" hand plane 50 0.84 0.94\n",
" planetarium 50 0.88 0.98\n",
" plastic bag 50 0.36 0.62\n",
" plate rack 50 0.52 0.78\n",
" plow 50 0.78 0.88\n",
" plunger 50 0.42 0.7\n",
" Polaroid camera 50 0.84 0.92\n",
" pole 50 0.38 0.74\n",
" police van 50 0.76 0.94\n",
" poncho 50 0.58 0.86\n",
" billiard table 50 0.8 0.88\n",
" soda bottle 50 0.56 0.94\n",
" pot 50 0.78 0.92\n",
" potter's wheel 50 0.9 0.94\n",
" power drill 50 0.42 0.72\n",
" prayer rug 50 0.7 0.86\n",
" printer 50 0.54 0.86\n",
" prison 50 0.7 0.9\n",
" projectile 50 0.28 0.9\n",
" projector 50 0.62 0.84\n",
" hockey puck 50 0.92 0.96\n",
" punching bag 50 0.6 0.68\n",
" purse 50 0.42 0.78\n",
" quill 50 0.68 0.84\n",
" quilt 50 0.64 0.9\n",
" race car 50 0.72 0.92\n",
" racket 50 0.72 0.9\n",
" radiator 50 0.66 0.76\n",
" radio 50 0.64 0.92\n",
" radio telescope 50 0.9 0.96\n",
" rain barrel 50 0.8 0.98\n",
" recreational vehicle 50 0.84 0.94\n",
" reel 50 0.72 0.82\n",
" reflex camera 50 0.72 0.92\n",
" refrigerator 50 0.7 0.9\n",
" remote control 50 0.7 0.88\n",
" restaurant 50 0.5 0.66\n",
" revolver 50 0.82 1\n",
" rifle 50 0.38 0.7\n",
" rocking chair 50 0.62 0.84\n",
" rotisserie 50 0.88 0.92\n",
" eraser 50 0.54 0.76\n",
" rugby ball 50 0.86 0.94\n",
" ruler 50 0.68 0.86\n",
" running shoe 50 0.78 0.94\n",
" safe 50 0.82 0.92\n",
" safety pin 50 0.4 0.62\n",
" salt shaker 50 0.66 0.9\n",
" sandal 50 0.66 0.86\n",
" sarong 50 0.64 0.86\n",
" saxophone 50 0.66 0.88\n",
" scabbard 50 0.76 0.92\n",
" weighing scale 50 0.58 0.78\n",
" school bus 50 0.92 1\n",
" schooner 50 0.84 1\n",
" scoreboard 50 0.9 0.96\n",
" CRT screen 50 0.14 0.7\n",
" screw 50 0.9 0.98\n",
" screwdriver 50 0.3 0.58\n",
" seat belt 50 0.88 0.94\n",
" sewing machine 50 0.76 0.9\n",
" shield 50 0.56 0.82\n",
" shoe store 50 0.78 0.96\n",
" shoji 50 0.8 0.92\n",
" shopping basket 50 0.52 0.88\n",
" shopping cart 50 0.76 0.92\n",
" shovel 50 0.62 0.84\n",
" shower cap 50 0.7 0.84\n",
" shower curtain 50 0.64 0.82\n",
" ski 50 0.74 0.92\n",
" ski mask 50 0.72 0.88\n",
" sleeping bag 50 0.68 0.8\n",
" slide rule 50 0.72 0.88\n",
" sliding door 50 0.44 0.78\n",
" slot machine 50 0.94 0.98\n",
" snorkel 50 0.86 0.98\n",
" snowmobile 50 0.88 1\n",
" snowplow 50 0.84 0.98\n",
" soap dispenser 50 0.56 0.86\n",
" soccer ball 50 0.86 0.96\n",
" sock 50 0.62 0.76\n",
" solar thermal collector 50 0.72 0.96\n",
" sombrero 50 0.6 0.84\n",
" soup bowl 50 0.56 0.94\n",
" space bar 50 0.34 0.88\n",
" space heater 50 0.52 0.74\n",
" space shuttle 50 0.82 0.96\n",
" spatula 50 0.3 0.6\n",
" motorboat 50 0.86 1\n",
" spider web 50 0.7 0.9\n",
" spindle 50 0.86 0.98\n",
" sports car 50 0.6 0.94\n",
" spotlight 50 0.26 0.6\n",
" stage 50 0.68 0.86\n",
" steam locomotive 50 0.94 1\n",
" through arch bridge 50 0.84 0.96\n",
" steel drum 50 0.82 0.9\n",
" stethoscope 50 0.6 0.82\n",
" scarf 50 0.5 0.92\n",
" stone wall 50 0.76 0.9\n",
" stopwatch 50 0.58 0.9\n",
" stove 50 0.46 0.74\n",
" strainer 50 0.64 0.84\n",
" tram 50 0.88 0.96\n",
" stretcher 50 0.6 0.8\n",
" couch 50 0.8 0.96\n",
" stupa 50 0.88 0.88\n",
" submarine 50 0.72 0.92\n",
" suit 50 0.4 0.78\n",
" sundial 50 0.58 0.74\n",
" sunglass 50 0.14 0.58\n",
" sunglasses 50 0.28 0.58\n",
" sunscreen 50 0.32 0.7\n",
" suspension bridge 50 0.6 0.94\n",
" mop 50 0.74 0.92\n",
" sweatshirt 50 0.28 0.66\n",
" swimsuit 50 0.52 0.82\n",
" swing 50 0.76 0.84\n",
" switch 50 0.56 0.76\n",
" syringe 50 0.62 0.82\n",
" table lamp 50 0.6 0.88\n",
" tank 50 0.8 0.96\n",
" tape player 50 0.46 0.76\n",
" teapot 50 0.84 1\n",
" teddy bear 50 0.82 0.94\n",
" television 50 0.6 0.9\n",
" tennis ball 50 0.7 0.94\n",
" thatched roof 50 0.88 0.9\n",
" front curtain 50 0.8 0.92\n",
" thimble 50 0.6 0.8\n",
" threshing machine 50 0.56 0.88\n",
" throne 50 0.72 0.82\n",
" tile roof 50 0.72 0.94\n",
" toaster 50 0.66 0.84\n",
" tobacco shop 50 0.42 0.7\n",
" toilet seat 50 0.62 0.88\n",
" torch 50 0.64 0.84\n",
" totem pole 50 0.92 0.98\n",
" tow truck 50 0.62 0.88\n",
" toy store 50 0.6 0.94\n",
" tractor 50 0.76 0.98\n",
" semi-trailer truck 50 0.78 0.92\n",
" tray 50 0.46 0.64\n",
" trench coat 50 0.54 0.72\n",
" tricycle 50 0.72 0.94\n",
" trimaran 50 0.7 0.98\n",
" tripod 50 0.58 0.86\n",
" triumphal arch 50 0.92 0.98\n",
" trolleybus 50 0.9 1\n",
" trombone 50 0.54 0.88\n",
" tub 50 0.24 0.82\n",
" turnstile 50 0.84 0.94\n",
" typewriter keyboard 50 0.68 0.98\n",
" umbrella 50 0.52 0.7\n",
" unicycle 50 0.74 0.96\n",
" upright piano 50 0.76 0.9\n",
" vacuum cleaner 50 0.62 0.9\n",
" vase 50 0.5 0.78\n",
" vault 50 0.76 0.92\n",
" velvet 50 0.2 0.42\n",
" vending machine 50 0.9 1\n",
" vestment 50 0.54 0.82\n",
" viaduct 50 0.78 0.86\n",
" violin 50 0.68 0.78\n",
" volleyball 50 0.86 1\n",
" waffle iron 50 0.72 0.88\n",
" wall clock 50 0.54 0.88\n",
" wallet 50 0.52 0.9\n",
" wardrobe 50 0.68 0.88\n",
" military aircraft 50 0.9 0.98\n",
" sink 50 0.72 0.96\n",
" washing machine 50 0.78 0.94\n",
" water bottle 50 0.54 0.74\n",
" water jug 50 0.22 0.74\n",
" water tower 50 0.9 0.96\n",
" whiskey jug 50 0.64 0.74\n",
" whistle 50 0.72 0.84\n",
" wig 50 0.84 0.9\n",
" window screen 50 0.68 0.8\n",
" window shade 50 0.52 0.76\n",
" Windsor tie 50 0.22 0.66\n",
" wine bottle 50 0.42 0.82\n",
" wing 50 0.54 0.96\n",
" wok 50 0.46 0.82\n",
" wooden spoon 50 0.58 0.8\n",
" wool 50 0.32 0.82\n",
" split-rail fence 50 0.74 0.9\n",
" shipwreck 50 0.84 0.96\n",
" yawl 50 0.78 0.96\n",
" yurt 50 0.84 1\n",
" website 50 0.98 1\n",
" comic book 50 0.62 0.9\n",
" crossword 50 0.84 0.88\n",
" traffic sign 50 0.78 0.9\n",
" traffic light 50 0.8 0.94\n",
" dust jacket 50 0.72 0.94\n",
" menu 50 0.82 0.96\n",
" plate 50 0.44 0.88\n",
" guacamole 50 0.8 0.92\n",
" consomme 50 0.54 0.88\n",
" hot pot 50 0.86 0.98\n",
" trifle 50 0.92 0.98\n",
" ice cream 50 0.68 0.94\n",
" ice pop 50 0.62 0.84\n",
" baguette 50 0.62 0.88\n",
" bagel 50 0.64 0.92\n",
" pretzel 50 0.72 0.88\n",
" cheeseburger 50 0.9 1\n",
" hot dog 50 0.74 0.94\n",
" mashed potato 50 0.74 0.9\n",
" cabbage 50 0.84 0.96\n",
" broccoli 50 0.9 0.96\n",
" cauliflower 50 0.82 1\n",
" zucchini 50 0.74 0.9\n",
" spaghetti squash 50 0.8 0.96\n",
" acorn squash 50 0.82 0.96\n",
" butternut squash 50 0.7 0.94\n",
" cucumber 50 0.6 0.96\n",
" artichoke 50 0.84 0.94\n",
" bell pepper 50 0.84 0.98\n",
" cardoon 50 0.88 0.94\n",
" mushroom 50 0.38 0.92\n",
" Granny Smith 50 0.9 0.96\n",
" strawberry 50 0.6 0.88\n",
" orange 50 0.7 0.92\n",
" lemon 50 0.78 0.98\n",
" fig 50 0.82 0.96\n",
" pineapple 50 0.86 0.96\n",
" banana 50 0.84 0.96\n",
" jackfruit 50 0.9 0.98\n",
" custard apple 50 0.86 0.96\n",
" pomegranate 50 0.82 0.98\n",
" hay 50 0.8 0.92\n",
" carbonara 50 0.88 0.94\n",
" chocolate syrup 50 0.46 0.84\n",
" dough 50 0.4 0.6\n",
" meatloaf 50 0.58 0.84\n",
" pizza 50 0.84 0.96\n",
" pot pie 50 0.68 0.9\n",
" burrito 50 0.8 0.98\n",
" red wine 50 0.54 0.82\n",
" espresso 50 0.64 0.88\n",
" cup 50 0.38 0.7\n",
" eggnog 50 0.38 0.7\n",
" alp 50 0.54 0.88\n",
" bubble 50 0.8 0.96\n",
" cliff 50 0.64 1\n",
" coral reef 50 0.72 0.96\n",
" geyser 50 0.94 1\n",
" lakeshore 50 0.54 0.88\n",
" promontory 50 0.58 0.94\n",
" shoal 50 0.6 0.96\n",
" seashore 50 0.44 0.78\n",
" valley 50 0.72 0.94\n",
" volcano 50 0.78 0.96\n",
" baseball player 50 0.72 0.94\n",
" bridegroom 50 0.72 0.88\n",
" scuba diver 50 0.8 1\n",
" rapeseed 50 0.94 0.98\n",
" daisy 50 0.96 0.98\n",
" yellow lady's slipper 50 1 1\n",
" corn 50 0.4 0.88\n",
" acorn 50 0.92 0.98\n",
" rose hip 50 0.92 0.98\n",
" horse chestnut seed 50 0.94 0.98\n",
" coral fungus 50 0.96 0.96\n",
" agaric 50 0.82 0.94\n",
" gyromitra 50 0.98 1\n",
" stinkhorn mushroom 50 0.8 0.94\n",
" earth star 50 0.98 1\n",
" hen-of-the-woods 50 0.8 0.96\n",
" bolete 50 0.74 0.94\n",
" ear 50 0.48 0.94\n",
" toilet paper 50 0.36 0.68\n",
"Speed: 0.1ms pre-process, 0.3ms inference, 0.0ms post-process per image at shape (1, 3, 224, 224)\n",
"Results saved to \u001b[1mruns/val-cls/exp\u001b[0m\n"
]
}
],
"source": [
"# Validate YOLOv5s on Imagenet val\n",
"!python classify/val.py --weights yolov5s-cls.pt --data ../datasets/imagenet --img 224 --half"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "ZY2VXXXu74w5"
},
"source": [
"# 3. Train\n",
"\n",
"

 "
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "Lay2WsTjNJzP"
},
"source": [
"## ClearML Logging and Automation 🌟 NEW\n",
"\n",
"[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
"\n",
"- `pip install clearml`\n",
"- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
"\n",
"You'll get all the great expected features from an experiment manager: live updates, model upload, experiment comparison etc. but ClearML also tracks uncommitted changes and installed packages for example. Thanks to that ClearML Tasks (which is what we call experiments) are also reproducible on different machines! With only 1 extra line, we can schedule a YOLOv5 training task on a queue to be executed by any number of ClearML Agents (workers).\n",
"\n",
"You can use ClearML Data to version your dataset and then pass it to YOLOv5 simply using its unique ID. This will help you keep track of your data without adding extra hassle. Explore the [ClearML Tutorial](https://docs.ultralytics.com/yolov5/tutorials/clearml_logging_integration) for details!\n",
"\n",
"\n",
"
"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "Lay2WsTjNJzP"
},
"source": [
"## ClearML Logging and Automation 🌟 NEW\n",
"\n",
"[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
"\n",
"- `pip install clearml`\n",
"- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
"\n",
"You'll get all the great expected features from an experiment manager: live updates, model upload, experiment comparison etc. but ClearML also tracks uncommitted changes and installed packages for example. Thanks to that ClearML Tasks (which is what we call experiments) are also reproducible on different machines! With only 1 extra line, we can schedule a YOLOv5 training task on a queue to be executed by any number of ClearML Agents (workers).\n",
"\n",
"You can use ClearML Data to version your dataset and then pass it to YOLOv5 simply using its unique ID. This will help you keep track of your data without adding extra hassle. Explore the [ClearML Tutorial](https://docs.ultralytics.com/yolov5/tutorials/clearml_logging_integration) for details!\n",
"\n",
"\n",
" "
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "-WPvRbS5Swl6"
},
"source": [
"## Local Logging\n",
"\n",
"Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
"\n",
"This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices. \n",
"\n",
"
"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "-WPvRbS5Swl6"
},
"source": [
"## Local Logging\n",
"\n",
"Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
"\n",
"This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices. \n",
"\n",
" \n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "Zelyeqbyt3GD"
},
"source": [
"# Environments\n",
"\n",
"YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
"\n",
"- **Notebooks** with free GPU: \n",
"- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/google_cloud_quickstart_tutorial/)\n",
"- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/aws_quickstart_tutorial/)\n",
"- **Docker Image**. See [Docker Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/docker_image_quickstart_tutorial/)
\n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "Zelyeqbyt3GD"
},
"source": [
"# Environments\n",
"\n",
"YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
"\n",
"- **Notebooks** with free GPU: \n",
"- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/google_cloud_quickstart_tutorial/)\n",
"- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/aws_quickstart_tutorial/)\n",
"- **Docker Image**. See [Docker Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/docker_image_quickstart_tutorial/)  \n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "6Qu7Iesl0p54"
},
"source": [
"# Status\n",
"\n",
"\n",
"\n",
"If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "IEijrePND_2I"
},
"source": [
"# Appendix\n",
"\n",
"Additional content below."
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"id": "GMusP4OAxFu6"
},
"outputs": [],
"source": [
"# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
"import torch\n",
"\n",
"model = torch.hub.load('ultralytics/yolov5', 'yolov5s', force_reload=True, trust_repo=True) # or yolov5n - yolov5x6 or custom\n",
"im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
"results = model(im) # inference\n",
"results.print() # or .show(), .save(), .crop(), .pandas(), etc."
]
}
],
"metadata": {
"accelerator": "GPU",
"colab": {
"name": "YOLOv5 Classification Tutorial",
"provenance": []
},
"kernelspec": {
"display_name": "Python 3 (ipykernel)",
"language": "python",
"name": "python3"
},
"language_info": {
"codemirror_mode": {
"name": "ipython",
"version": 3
},
"file_extension": ".py",
"mimetype": "text/x-python",
"name": "python",
"nbconvert_exporter": "python",
"pygments_lexer": "ipython3",
"version": "3.7.12"
}
},
"nbformat": 4,
"nbformat_minor": 0
}
================================================
FILE: classify/val.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""
Validate a trained YOLOv5 classification model on a classification dataset.
Usage:
$ bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G, 50000 images)
$ python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validate ImageNet
Usage - formats:
$ python classify/val.py --weights yolov5s-cls.pt # PyTorch
yolov5s-cls.torchscript # TorchScript
yolov5s-cls.onnx # ONNX Runtime or OpenCV DNN with --dnn
yolov5s-cls_openvino_model # OpenVINO
yolov5s-cls.engine # TensorRT
yolov5s-cls.mlmodel # CoreML (macOS-only)
yolov5s-cls_saved_model # TensorFlow SavedModel
yolov5s-cls.pb # TensorFlow GraphDef
yolov5s-cls.tflite # TensorFlow Lite
yolov5s-cls_edgetpu.tflite # TensorFlow Edge TPU
yolov5s-cls_paddle_model # PaddlePaddle
"""
import argparse
import os
import sys
from pathlib import Path
import torch
from tqdm import tqdm
FILE = Path(__file__).resolve()
ROOT = FILE.parents[1] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
from models.common import DetectMultiBackend
from utils.dataloaders import create_classification_dataloader
from utils.general import (
LOGGER,
TQDM_BAR_FORMAT,
Profile,
check_img_size,
check_requirements,
colorstr,
increment_path,
print_args,
)
from utils.torch_utils import select_device, smart_inference_mode
@smart_inference_mode()
def run(
data=ROOT / "../datasets/mnist", # dataset dir
weights=ROOT / "yolov5s-cls.pt", # model.pt path(s)
batch_size=128, # batch size
imgsz=224, # inference size (pixels)
device="", # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
verbose=False, # verbose output
project=ROOT / "runs/val-cls", # save to project/name
name="exp", # save to project/name
exist_ok=False, # existing project/name ok, do not increment
half=False, # use FP16 half-precision inference
dnn=False, # use OpenCV DNN for ONNX inference
model=None,
dataloader=None,
criterion=None,
pbar=None,
):
# Initialize/load model and set device
training = model is not None
if training: # called by train.py
device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
half &= device.type != "cpu" # half precision only supported on CUDA
model.half() if half else model.float()
else: # called directly
device = select_device(device, batch_size=batch_size)
# Directories
save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
save_dir.mkdir(parents=True, exist_ok=True) # make dir
# Load model
model = DetectMultiBackend(weights, device=device, dnn=dnn, fp16=half)
stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
imgsz = check_img_size(imgsz, s=stride) # check image size
half = model.fp16 # FP16 supported on limited backends with CUDA
if engine:
batch_size = model.batch_size
else:
device = model.device
if not (pt or jit):
batch_size = 1 # export.py models default to batch-size 1
LOGGER.info(f"Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models")
# Dataloader
data = Path(data)
test_dir = data / "test" if (data / "test").exists() else data / "val" # data/test or data/val
dataloader = create_classification_dataloader(
path=test_dir, imgsz=imgsz, batch_size=batch_size, augment=False, rank=-1, workers=workers
)
model.eval()
pred, targets, loss, dt = [], [], 0, (Profile(device=device), Profile(device=device), Profile(device=device))
n = len(dataloader) # number of batches
action = "validating" if dataloader.dataset.root.stem == "val" else "testing"
desc = f"{pbar.desc[:-36]}{action:>36}" if pbar else f"{action}"
bar = tqdm(dataloader, desc, n, not training, bar_format=TQDM_BAR_FORMAT, position=0)
with torch.cuda.amp.autocast(enabled=device.type != "cpu"):
for images, labels in bar:
with dt[0]:
images, labels = images.to(device, non_blocking=True), labels.to(device)
with dt[1]:
y = model(images)
with dt[2]:
pred.append(y.argsort(1, descending=True)[:, :5])
targets.append(labels)
if criterion:
loss += criterion(y, labels)
loss /= n
pred, targets = torch.cat(pred), torch.cat(targets)
correct = (targets[:, None] == pred).float()
acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
top1, top5 = acc.mean(0).tolist()
if pbar:
pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
if verbose: # all classes
LOGGER.info(f"{'Class':>24}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
LOGGER.info(f"{'all':>24}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
for i, c in model.names.items():
acc_i = acc[targets == i]
top1i, top5i = acc_i.mean(0).tolist()
LOGGER.info(f"{c:>24}{acc_i.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
# Print results
t = tuple(x.t / len(dataloader.dataset.samples) * 1e3 for x in dt) # speeds per image
shape = (1, 3, imgsz, imgsz)
LOGGER.info(f"Speed: %.1fms pre-process, %.1fms inference, %.1fms post-process per image at shape {shape}" % t)
LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
return top1, top5, loss
def parse_opt():
"""Parses and returns command line arguments for YOLOv5 model evaluation and inference settings."""
parser = argparse.ArgumentParser()
parser.add_argument("--data", type=str, default=ROOT / "../datasets/mnist", help="dataset path")
parser.add_argument("--weights", nargs="+", type=str, default=ROOT / "yolov5s-cls.pt", help="model.pt path(s)")
parser.add_argument("--batch-size", type=int, default=128, help="batch size")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=224, help="inference size (pixels)")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--workers", type=int, default=8, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--verbose", nargs="?", const=True, default=True, help="verbose output")
parser.add_argument("--project", default=ROOT / "runs/val-cls", help="save to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--half", action="store_true", help="use FP16 half-precision inference")
parser.add_argument("--dnn", action="store_true", help="use OpenCV DNN for ONNX inference")
opt = parser.parse_args()
print_args(vars(opt))
return opt
def main(opt):
"""Executes the YOLOv5 model prediction workflow, handling argument parsing and requirement checks."""
check_requirements(ROOT / "requirements.txt", exclude=("tensorboard", "thop"))
run(**vars(opt))
if __name__ == "__main__":
opt = parse_opt()
main(opt)
================================================
FILE: client.py
================================================
import pickle
import socket
import sys
import threading
import time
import traceback
import mss
from PyQt5.QtWidgets import QApplication
import apex_yolov5.socket.socket_util as socket_util
from apex_recoils.core.GameWindowsStatus import GameWindowsStatus
from apex_recoils.core.screentaker.LocalScreenTaker import LocalScreenTaker
from apex_recoils.net.socket.Server import Server
from apex_yolov5 import global_img_info
from apex_yolov5.grabscreen import grab_screen_int_array2
from apex_yolov5.job_listener import JoyListener
from apex_yolov5.job_listener.JoyToKey import JoyToKey
from apex_yolov5.log import LogFactory
from apex_yolov5.mouse_mover.Win32ApiMover import Win32ApiMover
from apex_yolov5.socket.config import global_config
def main():
while True:
try:
# ...or, in a non-blocking fashion:
# 创建一个TCP/IP套接字
client_socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
# 服务器地址和端口
server_address = (global_config.listener_ip, global_config.listener_port)
# 连接服务器
client_socket.connect(server_address)
buffer_size = global_config.buffer_size
sct = mss.mss()
print("连接成功")
try:
while True:
if not global_config.ai_toggle:
time.sleep(0.1)
continue
screenshot = grab_screen_int_array2(sct=sct, monitor=global_config.monitor)
global_img_info.set_current_img_2(screenshot, screenshot, screenshot.width, screenshot.height)
data = {"img_origin": screenshot.rgb, "shot_width": screenshot.width,
"shot_height": screenshot.height}
data = pickle.dumps(data)
socket_util.send(client_socket, data, buffer_size=buffer_size)
averager_data = socket_util.recv(client_socket, buffer_size=buffer_size)
if averager_data is None:
continue
averager = pickle.loads(averager_data)
global_config.sign_shot_xy(averager)
global_config.change_shot_xy()
except Exception as e:
print(e)
traceback.print_exc()
pass
finally:
# 关闭连接
client_socket.close()
except:
pass
finally:
time.sleep(1)
print("连接断开,等待重连...")
pass
if __name__ == "__main__":
app = QApplication(sys.argv)
LogFactory.init_logger()
server = Server(server_address=(global_config.distributed_param["ip"], global_config.distributed_param["port"]),
screen_taker=LocalScreenTaker())
threading.Thread(target=server.wait_client).start()
game_windows_status = GameWindowsStatus()
jtk = JoyToKey(joy_to_key_map=global_config.joy_to_key_map,
c1_mouse_mover=Win32ApiMover({}), game_windows_status=game_windows_status)
JoyListener.joy_listener = JoyListener.JoyListener()
JoyListener.joy_listener.connect_axis(jtk.axis_to_key)
JoyListener.joy_listener.start(None)
threading.Thread(target=main).start()
sys.exit(app.exec_())
================================================
FILE: client.spec
================================================
# -*- mode: python ; coding: utf-8 -*-
block_cipher = None
pathex = [
'C:/Users/Administrator/PycharmProjects/yolov5'
]
hiddenimports = ['models.yolo',
'utils',
'utils.general',
'models',
'utils.aws',
'utils.docker',
'utils.flask_rest_api',
'utils.google_app_engine',
'utils.loggers',
'utils.segment',
'utils.loggers.clearml',
'utils.loggers.comet',
'utils.loggers.wandb',
'utils.segment',
'models.hub',
'segment',
'apex_yolov5',
'apex_yolov5.socket'
]
a = Analysis(
['client.py'],
pathex=pathex,
binaries=[(r'./utils/general.pyc',r'./utils')],
datas=[(r'./config/global_config.json',r'./config')],
hiddenimports=['models.yolo'],
hookspath=[],
hooksconfig={},
runtime_hooks=[],
excludes=[],
win_no_prefer_redirects=False,
win_private_assemblies=False,
cipher=block_cipher,
noarchive=False,
)
pyz = PYZ(a.pure, a.zipped_data, cipher=block_cipher)
exe = EXE(
pyz,
a.scripts,
[],
exclude_binaries=True,
name='client',
debug=False,
bootloader_ignore_signals=False,
strip=False,
upx=True,
console=False,
disable_windowed_traceback=False,
argv_emulation=False,
target_arch=None,
codesign_identity=None,
entitlements_file=None,
)
coll = COLLECT(
exe,
a.binaries,
a.zipfiles,
a.datas,
strip=False,
upx=True,
upx_exclude=[],
name='client',
)
================================================
FILE: config/ref.txt
================================================
global_config
================================================
FILE: data/Argoverse.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Argoverse-HD dataset (ring-front-center camera) http://www.cs.cmu.edu/~mengtial/proj/streaming/ by Argo AI
# Example usage: python train.py --data Argoverse.yaml
# parent
# ├── yolov5
# └── datasets
# └── Argoverse ← downloads here (31.3 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/Argoverse # dataset root dir
train: Argoverse-1.1/images/train/ # train images (relative to 'path') 39384 images
val: Argoverse-1.1/images/val/ # val images (relative to 'path') 15062 images
test: Argoverse-1.1/images/test/ # test images (optional) https://eval.ai/web/challenges/challenge-page/800/overview
# Classes
names:
0: person
1: bicycle
2: car
3: motorcycle
4: bus
5: truck
6: traffic_light
7: stop_sign
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
import json
from tqdm import tqdm
from utils.general import download, Path
def argoverse2yolo(set):
labels = {}
a = json.load(open(set, "rb"))
for annot in tqdm(a['annotations'], desc=f"Converting {set} to YOLOv5 format..."):
img_id = annot['image_id']
img_name = a['images'][img_id]['name']
img_label_name = f'{img_name[:-3]}txt'
cls = annot['category_id'] # instance class id
x_center, y_center, width, height = annot['bbox']
x_center = (x_center + width / 2) / 1920.0 # offset and scale
y_center = (y_center + height / 2) / 1200.0 # offset and scale
width /= 1920.0 # scale
height /= 1200.0 # scale
img_dir = set.parents[2] / 'Argoverse-1.1' / 'labels' / a['seq_dirs'][a['images'][annot['image_id']]['sid']]
if not img_dir.exists():
img_dir.mkdir(parents=True, exist_ok=True)
k = str(img_dir / img_label_name)
if k not in labels:
labels[k] = []
labels[k].append(f"{cls} {x_center} {y_center} {width} {height}\n")
for k in labels:
with open(k, "w") as f:
f.writelines(labels[k])
# Download
dir = Path(yaml['path']) # dataset root dir
urls = ['https://argoverse-hd.s3.us-east-2.amazonaws.com/Argoverse-HD-Full.zip']
download(urls, dir=dir, delete=False)
# Convert
annotations_dir = 'Argoverse-HD/annotations/'
(dir / 'Argoverse-1.1' / 'tracking').rename(dir / 'Argoverse-1.1' / 'images') # rename 'tracking' to 'images'
for d in "train.json", "val.json":
argoverse2yolo(dir / annotations_dir / d) # convert VisDrone annotations to YOLO labels
================================================
FILE: data/GlobalWheat2020.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Global Wheat 2020 dataset http://www.global-wheat.com/ by University of Saskatchewan
# Example usage: python train.py --data GlobalWheat2020.yaml
# parent
# ├── yolov5
# └── datasets
# └── GlobalWheat2020 ← downloads here (7.0 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/GlobalWheat2020 # dataset root dir
train: # train images (relative to 'path') 3422 images
- images/arvalis_1
- images/arvalis_2
- images/arvalis_3
- images/ethz_1
- images/rres_1
- images/inrae_1
- images/usask_1
val: # val images (relative to 'path') 748 images (WARNING: train set contains ethz_1)
- images/ethz_1
test: # test images (optional) 1276 images
- images/utokyo_1
- images/utokyo_2
- images/nau_1
- images/uq_1
# Classes
names:
0: wheat_head
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
from utils.general import download, Path
# Download
dir = Path(yaml['path']) # dataset root dir
urls = ['https://zenodo.org/record/4298502/files/global-wheat-codalab-official.zip',
'https://github.com/ultralytics/yolov5/releases/download/v1.0/GlobalWheat2020_labels.zip']
download(urls, dir=dir)
# Make Directories
for p in 'annotations', 'images', 'labels':
(dir / p).mkdir(parents=True, exist_ok=True)
# Move
for p in 'arvalis_1', 'arvalis_2', 'arvalis_3', 'ethz_1', 'rres_1', 'inrae_1', 'usask_1', \
'utokyo_1', 'utokyo_2', 'nau_1', 'uq_1':
(dir / p).rename(dir / 'images' / p) # move to /images
f = (dir / p).with_suffix('.json') # json file
if f.exists():
f.rename((dir / 'annotations' / p).with_suffix('.json')) # move to /annotations
================================================
FILE: data/ImageNet.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
# Example usage: python classify/train.py --data imagenet
# parent
# ├── yolov5
# └── datasets
# └── imagenet ← downloads here (144 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/imagenet # dataset root dir
train: train # train images (relative to 'path') 1281167 images
val: val # val images (relative to 'path') 50000 images
test: # test images (optional)
# Classes
names:
0: tench
1: goldfish
2: great white shark
3: tiger shark
4: hammerhead shark
5: electric ray
6: stingray
7: cock
8: hen
9: ostrich
10: brambling
11: goldfinch
12: house finch
13: junco
14: indigo bunting
15: American robin
16: bulbul
17: jay
18: magpie
19: chickadee
20: American dipper
21: kite
22: bald eagle
23: vulture
24: great grey owl
25: fire salamander
26: smooth newt
27: newt
28: spotted salamander
29: axolotl
30: American bullfrog
31: tree frog
32: tailed frog
33: loggerhead sea turtle
34: leatherback sea turtle
35: mud turtle
36: terrapin
37: box turtle
38: banded gecko
39: green iguana
40: Carolina anole
41: desert grassland whiptail lizard
42: agama
43: frilled-necked lizard
44: alligator lizard
45: Gila monster
46: European green lizard
47: chameleon
48: Komodo dragon
49: Nile crocodile
50: American alligator
51: triceratops
52: worm snake
53: ring-necked snake
54: eastern hog-nosed snake
55: smooth green snake
56: kingsnake
57: garter snake
58: water snake
59: vine snake
60: night snake
61: boa constrictor
62: African rock python
63: Indian cobra
64: green mamba
65: sea snake
66: Saharan horned viper
67: eastern diamondback rattlesnake
68: sidewinder
69: trilobite
70: harvestman
71: scorpion
72: yellow garden spider
73: barn spider
74: European garden spider
75: southern black widow
76: tarantula
77: wolf spider
78: tick
79: centipede
80: black grouse
81: ptarmigan
82: ruffed grouse
83: prairie grouse
84: peacock
85: quail
86: partridge
87: grey parrot
88: macaw
89: sulphur-crested cockatoo
90: lorikeet
91: coucal
92: bee eater
93: hornbill
94: hummingbird
95: jacamar
96: toucan
97: duck
98: red-breasted merganser
99: goose
100: black swan
101: tusker
102: echidna
103: platypus
104: wallaby
105: koala
106: wombat
107: jellyfish
108: sea anemone
109: brain coral
110: flatworm
111: nematode
112: conch
113: snail
114: slug
115: sea slug
116: chiton
117: chambered nautilus
118: Dungeness crab
119: rock crab
120: fiddler crab
121: red king crab
122: American lobster
123: spiny lobster
124: crayfish
125: hermit crab
126: isopod
127: white stork
128: black stork
129: spoonbill
130: flamingo
131: little blue heron
132: great egret
133: bittern
134: crane (bird)
135: limpkin
136: common gallinule
137: American coot
138: bustard
139: ruddy turnstone
140: dunlin
141: common redshank
142: dowitcher
143: oystercatcher
144: pelican
145: king penguin
146: albatross
147: grey whale
148: killer whale
149: dugong
150: sea lion
151: Chihuahua
152: Japanese Chin
153: Maltese
154: Pekingese
155: Shih Tzu
156: King Charles Spaniel
157: Papillon
158: toy terrier
159: Rhodesian Ridgeback
160: Afghan Hound
161: Basset Hound
162: Beagle
163: Bloodhound
164: Bluetick Coonhound
165: Black and Tan Coonhound
166: Treeing Walker Coonhound
167: English foxhound
168: Redbone Coonhound
169: borzoi
170: Irish Wolfhound
171: Italian Greyhound
172: Whippet
173: Ibizan Hound
174: Norwegian Elkhound
175: Otterhound
176: Saluki
177: Scottish Deerhound
178: Weimaraner
179: Staffordshire Bull Terrier
180: American Staffordshire Terrier
181: Bedlington Terrier
182: Border Terrier
183: Kerry Blue Terrier
184: Irish Terrier
185: Norfolk Terrier
186: Norwich Terrier
187: Yorkshire Terrier
188: Wire Fox Terrier
189: Lakeland Terrier
190: Sealyham Terrier
191: Airedale Terrier
192: Cairn Terrier
193: Australian Terrier
194: Dandie Dinmont Terrier
195: Boston Terrier
196: Miniature Schnauzer
197: Giant Schnauzer
198: Standard Schnauzer
199: Scottish Terrier
200: Tibetan Terrier
201: Australian Silky Terrier
202: Soft-coated Wheaten Terrier
203: West Highland White Terrier
204: Lhasa Apso
205: Flat-Coated Retriever
206: Curly-coated Retriever
207: Golden Retriever
208: Labrador Retriever
209: Chesapeake Bay Retriever
210: German Shorthaired Pointer
211: Vizsla
212: English Setter
213: Irish Setter
214: Gordon Setter
215: Brittany
216: Clumber Spaniel
217: English Springer Spaniel
218: Welsh Springer Spaniel
219: Cocker Spaniels
220: Sussex Spaniel
221: Irish Water Spaniel
222: Kuvasz
223: Schipperke
224: Groenendael
225: Malinois
226: Briard
227: Australian Kelpie
228: Komondor
229: Old English Sheepdog
230: Shetland Sheepdog
231: collie
232: Border Collie
233: Bouvier des Flandres
234: Rottweiler
235: German Shepherd Dog
236: Dobermann
237: Miniature Pinscher
238: Greater Swiss Mountain Dog
239: Bernese Mountain Dog
240: Appenzeller Sennenhund
241: Entlebucher Sennenhund
242: Boxer
243: Bullmastiff
244: Tibetan Mastiff
245: French Bulldog
246: Great Dane
247: St. Bernard
248: husky
249: Alaskan Malamute
250: Siberian Husky
251: Dalmatian
252: Affenpinscher
253: Basenji
254: pug
255: Leonberger
256: Newfoundland
257: Pyrenean Mountain Dog
258: Samoyed
259: Pomeranian
260: Chow Chow
261: Keeshond
262: Griffon Bruxellois
263: Pembroke Welsh Corgi
264: Cardigan Welsh Corgi
265: Toy Poodle
266: Miniature Poodle
267: Standard Poodle
268: Mexican hairless dog
269: grey wolf
270: Alaskan tundra wolf
271: red wolf
272: coyote
273: dingo
274: dhole
275: African wild dog
276: hyena
277: red fox
278: kit fox
279: Arctic fox
280: grey fox
281: tabby cat
282: tiger cat
283: Persian cat
284: Siamese cat
285: Egyptian Mau
286: cougar
287: lynx
288: leopard
289: snow leopard
290: jaguar
291: lion
292: tiger
293: cheetah
294: brown bear
295: American black bear
296: polar bear
297: sloth bear
298: mongoose
299: meerkat
300: tiger beetle
301: ladybug
302: ground beetle
303: longhorn beetle
304: leaf beetle
305: dung beetle
306: rhinoceros beetle
307: weevil
308: fly
309: bee
310: ant
311: grasshopper
312: cricket
313: stick insect
314: cockroach
315: mantis
316: cicada
317: leafhopper
318: lacewing
319: dragonfly
320: damselfly
321: red admiral
322: ringlet
323: monarch butterfly
324: small white
325: sulphur butterfly
326: gossamer-winged butterfly
327: starfish
328: sea urchin
329: sea cucumber
330: cottontail rabbit
331: hare
332: Angora rabbit
333: hamster
334: porcupine
335: fox squirrel
336: marmot
337: beaver
338: guinea pig
339: common sorrel
340: zebra
341: pig
342: wild boar
343: warthog
344: hippopotamus
345: ox
346: water buffalo
347: bison
348: ram
349: bighorn sheep
350: Alpine ibex
351: hartebeest
352: impala
353: gazelle
354: dromedary
355: llama
356: weasel
357: mink
358: European polecat
359: black-footed ferret
360: otter
361: skunk
362: badger
363: armadillo
364: three-toed sloth
365: orangutan
366: gorilla
367: chimpanzee
368: gibbon
369: siamang
370: guenon
371: patas monkey
372: baboon
373: macaque
374: langur
375: black-and-white colobus
376: proboscis monkey
377: marmoset
378: white-headed capuchin
379: howler monkey
380: titi
381: Geoffroy's spider monkey
382: common squirrel monkey
383: ring-tailed lemur
384: indri
385: Asian elephant
386: African bush elephant
387: red panda
388: giant panda
389: snoek
390: eel
391: coho salmon
392: rock beauty
393: clownfish
394: sturgeon
395: garfish
396: lionfish
397: pufferfish
398: abacus
399: abaya
400: academic gown
401: accordion
402: acoustic guitar
403: aircraft carrier
404: airliner
405: airship
406: altar
407: ambulance
408: amphibious vehicle
409: analog clock
410: apiary
411: apron
412: waste container
413: assault rifle
414: backpack
415: bakery
416: balance beam
417: balloon
418: ballpoint pen
419: Band-Aid
420: banjo
421: baluster
422: barbell
423: barber chair
424: barbershop
425: barn
426: barometer
427: barrel
428: wheelbarrow
429: baseball
430: basketball
431: bassinet
432: bassoon
433: swimming cap
434: bath towel
435: bathtub
436: station wagon
437: lighthouse
438: beaker
439: military cap
440: beer bottle
441: beer glass
442: bell-cot
443: bib
444: tandem bicycle
445: bikini
446: ring binder
447: binoculars
448: birdhouse
449: boathouse
450: bobsleigh
451: bolo tie
452: poke bonnet
453: bookcase
454: bookstore
455: bottle cap
456: bow
457: bow tie
458: brass
459: bra
460: breakwater
461: breastplate
462: broom
463: bucket
464: buckle
465: bulletproof vest
466: high-speed train
467: butcher shop
468: taxicab
469: cauldron
470: candle
471: cannon
472: canoe
473: can opener
474: cardigan
475: car mirror
476: carousel
477: tool kit
478: carton
479: car wheel
480: automated teller machine
481: cassette
482: cassette player
483: castle
484: catamaran
485: CD player
486: cello
487: mobile phone
488: chain
489: chain-link fence
490: chain mail
491: chainsaw
492: chest
493: chiffonier
494: chime
495: china cabinet
496: Christmas stocking
497: church
498: movie theater
499: cleaver
500: cliff dwelling
501: cloak
502: clogs
503: cocktail shaker
504: coffee mug
505: coffeemaker
506: coil
507: combination lock
508: computer keyboard
509: confectionery store
510: container ship
511: convertible
512: corkscrew
513: cornet
514: cowboy boot
515: cowboy hat
516: cradle
517: crane (machine)
518: crash helmet
519: crate
520: infant bed
521: Crock Pot
522: croquet ball
523: crutch
524: cuirass
525: dam
526: desk
527: desktop computer
528: rotary dial telephone
529: diaper
530: digital clock
531: digital watch
532: dining table
533: dishcloth
534: dishwasher
535: disc brake
536: dock
537: dog sled
538: dome
539: doormat
540: drilling rig
541: drum
542: drumstick
543: dumbbell
544: Dutch oven
545: electric fan
546: electric guitar
547: electric locomotive
548: entertainment center
549: envelope
550: espresso machine
551: face powder
552: feather boa
553: filing cabinet
554: fireboat
555: fire engine
556: fire screen sheet
557: flagpole
558: flute
559: folding chair
560: football helmet
561: forklift
562: fountain
563: fountain pen
564: four-poster bed
565: freight car
566: French horn
567: frying pan
568: fur coat
569: garbage truck
570: gas mask
571: gas pump
572: goblet
573: go-kart
574: golf ball
575: golf cart
576: gondola
577: gong
578: gown
579: grand piano
580: greenhouse
581: grille
582: grocery store
583: guillotine
584: barrette
585: hair spray
586: half-track
587: hammer
588: hamper
589: hair dryer
590: hand-held computer
591: handkerchief
592: hard disk drive
593: harmonica
594: harp
595: harvester
596: hatchet
597: holster
598: home theater
599: honeycomb
600: hook
601: hoop skirt
602: horizontal bar
603: horse-drawn vehicle
604: hourglass
605: iPod
606: clothes iron
607: jack-o'-lantern
608: jeans
609: jeep
610: T-shirt
611: jigsaw puzzle
612: pulled rickshaw
613: joystick
614: kimono
615: knee pad
616: knot
617: lab coat
618: ladle
619: lampshade
620: laptop computer
621: lawn mower
622: lens cap
623: paper knife
624: library
625: lifeboat
626: lighter
627: limousine
628: ocean liner
629: lipstick
630: slip-on shoe
631: lotion
632: speaker
633: loupe
634: sawmill
635: magnetic compass
636: mail bag
637: mailbox
638: tights
639: tank suit
640: manhole cover
641: maraca
642: marimba
643: mask
644: match
645: maypole
646: maze
647: measuring cup
648: medicine chest
649: megalith
650: microphone
651: microwave oven
652: military uniform
653: milk can
654: minibus
655: miniskirt
656: minivan
657: missile
658: mitten
659: mixing bowl
660: mobile home
661: Model T
662: modem
663: monastery
664: monitor
665: moped
666: mortar
667: square academic cap
668: mosque
669: mosquito net
670: scooter
671: mountain bike
672: tent
673: computer mouse
674: mousetrap
675: moving van
676: muzzle
677: nail
678: neck brace
679: necklace
680: nipple
681: notebook computer
682: obelisk
683: oboe
684: ocarina
685: odometer
686: oil filter
687: organ
688: oscilloscope
689: overskirt
690: bullock cart
691: oxygen mask
692: packet
693: paddle
694: paddle wheel
695: padlock
696: paintbrush
697: pajamas
698: palace
699: pan flute
700: paper towel
701: parachute
702: parallel bars
703: park bench
704: parking meter
705: passenger car
706: patio
707: payphone
708: pedestal
709: pencil case
710: pencil sharpener
711: perfume
712: Petri dish
713: photocopier
714: plectrum
715: Pickelhaube
716: picket fence
717: pickup truck
718: pier
719: piggy bank
720: pill bottle
721: pillow
722: ping-pong ball
723: pinwheel
724: pirate ship
725: pitcher
726: hand plane
727: planetarium
728: plastic bag
729: plate rack
730: plow
731: plunger
732: Polaroid camera
733: pole
734: police van
735: poncho
736: billiard table
737: soda bottle
738: pot
739: potter's wheel
740: power drill
741: prayer rug
742: printer
743: prison
744: projectile
745: projector
746: hockey puck
747: punching bag
748: purse
749: quill
750: quilt
751: race car
752: racket
753: radiator
754: radio
755: radio telescope
756: rain barrel
757: recreational vehicle
758: reel
759: reflex camera
760: refrigerator
761: remote control
762: restaurant
763: revolver
764: rifle
765: rocking chair
766: rotisserie
767: eraser
768: rugby ball
769: ruler
770: running shoe
771: safe
772: safety pin
773: salt shaker
774: sandal
775: sarong
776: saxophone
777: scabbard
778: weighing scale
779: school bus
780: schooner
781: scoreboard
782: CRT screen
783: screw
784: screwdriver
785: seat belt
786: sewing machine
787: shield
788: shoe store
789: shoji
790: shopping basket
791: shopping cart
792: shovel
793: shower cap
794: shower curtain
795: ski
796: ski mask
797: sleeping bag
798: slide rule
799: sliding door
800: slot machine
801: snorkel
802: snowmobile
803: snowplow
804: soap dispenser
805: soccer ball
806: sock
807: solar thermal collector
808: sombrero
809: soup bowl
810: space bar
811: space heater
812: space shuttle
813: spatula
814: motorboat
815: spider web
816: spindle
817: sports car
818: spotlight
819: stage
820: steam locomotive
821: through arch bridge
822: steel drum
823: stethoscope
824: scarf
825: stone wall
826: stopwatch
827: stove
828: strainer
829: tram
830: stretcher
831: couch
832: stupa
833: submarine
834: suit
835: sundial
836: sunglass
837: sunglasses
838: sunscreen
839: suspension bridge
840: mop
841: sweatshirt
842: swimsuit
843: swing
844: switch
845: syringe
846: table lamp
847: tank
848: tape player
849: teapot
850: teddy bear
851: television
852: tennis ball
853: thatched roof
854: front curtain
855: thimble
856: threshing machine
857: throne
858: tile roof
859: toaster
860: tobacco shop
861: toilet seat
862: torch
863: totem pole
864: tow truck
865: toy store
866: tractor
867: semi-trailer truck
868: tray
869: trench coat
870: tricycle
871: trimaran
872: tripod
873: triumphal arch
874: trolleybus
875: trombone
876: tub
877: turnstile
878: typewriter keyboard
879: umbrella
880: unicycle
881: upright piano
882: vacuum cleaner
883: vase
884: vault
885: velvet
886: vending machine
887: vestment
888: viaduct
889: violin
890: volleyball
891: waffle iron
892: wall clock
893: wallet
894: wardrobe
895: military aircraft
896: sink
897: washing machine
898: water bottle
899: water jug
900: water tower
901: whiskey jug
902: whistle
903: wig
904: window screen
905: window shade
906: Windsor tie
907: wine bottle
908: wing
909: wok
910: wooden spoon
911: wool
912: split-rail fence
913: shipwreck
914: yawl
915: yurt
916: website
917: comic book
918: crossword
919: traffic sign
920: traffic light
921: dust jacket
922: menu
923: plate
924: guacamole
925: consomme
926: hot pot
927: trifle
928: ice cream
929: ice pop
930: baguette
931: bagel
932: pretzel
933: cheeseburger
934: hot dog
935: mashed potato
936: cabbage
937: broccoli
938: cauliflower
939: zucchini
940: spaghetti squash
941: acorn squash
942: butternut squash
943: cucumber
944: artichoke
945: bell pepper
946: cardoon
947: mushroom
948: Granny Smith
949: strawberry
950: orange
951: lemon
952: fig
953: pineapple
954: banana
955: jackfruit
956: custard apple
957: pomegranate
958: hay
959: carbonara
960: chocolate syrup
961: dough
962: meatloaf
963: pizza
964: pot pie
965: burrito
966: red wine
967: espresso
968: cup
969: eggnog
970: alp
971: bubble
972: cliff
973: coral reef
974: geyser
975: lakeshore
976: promontory
977: shoal
978: seashore
979: valley
980: volcano
981: baseball player
982: bridegroom
983: scuba diver
984: rapeseed
985: daisy
986: yellow lady's slipper
987: corn
988: acorn
989: rose hip
990: horse chestnut seed
991: coral fungus
992: agaric
993: gyromitra
994: stinkhorn mushroom
995: earth star
996: hen-of-the-woods
997: bolete
998: ear
999: toilet paper
# Download script/URL (optional)
download: data/scripts/get_imagenet.sh
================================================
FILE: data/ImageNet10.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
# Example usage: python classify/train.py --data imagenet
# parent
# ├── yolov5
# └── datasets
# └── imagenet10 ← downloads here
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/imagenet10 # dataset root dir
train: train # train images (relative to 'path') 1281167 images
val: val # val images (relative to 'path') 50000 images
test: # test images (optional)
# Classes
names:
0: tench
1: goldfish
2: great white shark
3: tiger shark
4: hammerhead shark
5: electric ray
6: stingray
7: cock
8: hen
9: ostrich
# Download script/URL (optional)
download: data/scripts/get_imagenet10.sh
================================================
FILE: data/ImageNet100.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
# Example usage: python classify/train.py --data imagenet
# parent
# ├── yolov5
# └── datasets
# └── imagenet100 ← downloads here
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/imagenet100 # dataset root dir
train: train # train images (relative to 'path') 1281167 images
val: val # val images (relative to 'path') 50000 images
test: # test images (optional)
# Classes
names:
0: tench
1: goldfish
2: great white shark
3: tiger shark
4: hammerhead shark
5: electric ray
6: stingray
7: cock
8: hen
9: ostrich
10: brambling
11: goldfinch
12: house finch
13: junco
14: indigo bunting
15: American robin
16: bulbul
17: jay
18: magpie
19: chickadee
20: American dipper
21: kite
22: bald eagle
23: vulture
24: great grey owl
25: fire salamander
26: smooth newt
27: newt
28: spotted salamander
29: axolotl
30: American bullfrog
31: tree frog
32: tailed frog
33: loggerhead sea turtle
34: leatherback sea turtle
35: mud turtle
36: terrapin
37: box turtle
38: banded gecko
39: green iguana
40: Carolina anole
41: desert grassland whiptail lizard
42: agama
43: frilled-necked lizard
44: alligator lizard
45: Gila monster
46: European green lizard
47: chameleon
48: Komodo dragon
49: Nile crocodile
50: American alligator
51: triceratops
52: worm snake
53: ring-necked snake
54: eastern hog-nosed snake
55: smooth green snake
56: kingsnake
57: garter snake
58: water snake
59: vine snake
60: night snake
61: boa constrictor
62: African rock python
63: Indian cobra
64: green mamba
65: sea snake
66: Saharan horned viper
67: eastern diamondback rattlesnake
68: sidewinder
69: trilobite
70: harvestman
71: scorpion
72: yellow garden spider
73: barn spider
74: European garden spider
75: southern black widow
76: tarantula
77: wolf spider
78: tick
79: centipede
80: black grouse
81: ptarmigan
82: ruffed grouse
83: prairie grouse
84: peacock
85: quail
86: partridge
87: grey parrot
88: macaw
89: sulphur-crested cockatoo
90: lorikeet
91: coucal
92: bee eater
93: hornbill
94: hummingbird
95: jacamar
96: toucan
97: duck
98: red-breasted merganser
99: goose
# Download script/URL (optional)
download: data/scripts/get_imagenet100.sh
================================================
FILE: data/ImageNet1000.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
# Example usage: python classify/train.py --data imagenet
# parent
# ├── yolov5
# └── datasets
# └── imagenet100 ← downloads here
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/imagenet1000 # dataset root dir
train: train # train images (relative to 'path') 1281167 images
val: val # val images (relative to 'path') 50000 images
test: # test images (optional)
# Classes
names:
0: tench
1: goldfish
2: great white shark
3: tiger shark
4: hammerhead shark
5: electric ray
6: stingray
7: cock
8: hen
9: ostrich
10: brambling
11: goldfinch
12: house finch
13: junco
14: indigo bunting
15: American robin
16: bulbul
17: jay
18: magpie
19: chickadee
20: American dipper
21: kite
22: bald eagle
23: vulture
24: great grey owl
25: fire salamander
26: smooth newt
27: newt
28: spotted salamander
29: axolotl
30: American bullfrog
31: tree frog
32: tailed frog
33: loggerhead sea turtle
34: leatherback sea turtle
35: mud turtle
36: terrapin
37: box turtle
38: banded gecko
39: green iguana
40: Carolina anole
41: desert grassland whiptail lizard
42: agama
43: frilled-necked lizard
44: alligator lizard
45: Gila monster
46: European green lizard
47: chameleon
48: Komodo dragon
49: Nile crocodile
50: American alligator
51: triceratops
52: worm snake
53: ring-necked snake
54: eastern hog-nosed snake
55: smooth green snake
56: kingsnake
57: garter snake
58: water snake
59: vine snake
60: night snake
61: boa constrictor
62: African rock python
63: Indian cobra
64: green mamba
65: sea snake
66: Saharan horned viper
67: eastern diamondback rattlesnake
68: sidewinder
69: trilobite
70: harvestman
71: scorpion
72: yellow garden spider
73: barn spider
74: European garden spider
75: southern black widow
76: tarantula
77: wolf spider
78: tick
79: centipede
80: black grouse
81: ptarmigan
82: ruffed grouse
83: prairie grouse
84: peacock
85: quail
86: partridge
87: grey parrot
88: macaw
89: sulphur-crested cockatoo
90: lorikeet
91: coucal
92: bee eater
93: hornbill
94: hummingbird
95: jacamar
96: toucan
97: duck
98: red-breasted merganser
99: goose
100: black swan
101: tusker
102: echidna
103: platypus
104: wallaby
105: koala
106: wombat
107: jellyfish
108: sea anemone
109: brain coral
110: flatworm
111: nematode
112: conch
113: snail
114: slug
115: sea slug
116: chiton
117: chambered nautilus
118: Dungeness crab
119: rock crab
120: fiddler crab
121: red king crab
122: American lobster
123: spiny lobster
124: crayfish
125: hermit crab
126: isopod
127: white stork
128: black stork
129: spoonbill
130: flamingo
131: little blue heron
132: great egret
133: bittern
134: crane (bird)
135: limpkin
136: common gallinule
137: American coot
138: bustard
139: ruddy turnstone
140: dunlin
141: common redshank
142: dowitcher
143: oystercatcher
144: pelican
145: king penguin
146: albatross
147: grey whale
148: killer whale
149: dugong
150: sea lion
151: Chihuahua
152: Japanese Chin
153: Maltese
154: Pekingese
155: Shih Tzu
156: King Charles Spaniel
157: Papillon
158: toy terrier
159: Rhodesian Ridgeback
160: Afghan Hound
161: Basset Hound
162: Beagle
163: Bloodhound
164: Bluetick Coonhound
165: Black and Tan Coonhound
166: Treeing Walker Coonhound
167: English foxhound
168: Redbone Coonhound
169: borzoi
170: Irish Wolfhound
171: Italian Greyhound
172: Whippet
173: Ibizan Hound
174: Norwegian Elkhound
175: Otterhound
176: Saluki
177: Scottish Deerhound
178: Weimaraner
179: Staffordshire Bull Terrier
180: American Staffordshire Terrier
181: Bedlington Terrier
182: Border Terrier
183: Kerry Blue Terrier
184: Irish Terrier
185: Norfolk Terrier
186: Norwich Terrier
187: Yorkshire Terrier
188: Wire Fox Terrier
189: Lakeland Terrier
190: Sealyham Terrier
191: Airedale Terrier
192: Cairn Terrier
193: Australian Terrier
194: Dandie Dinmont Terrier
195: Boston Terrier
196: Miniature Schnauzer
197: Giant Schnauzer
198: Standard Schnauzer
199: Scottish Terrier
200: Tibetan Terrier
201: Australian Silky Terrier
202: Soft-coated Wheaten Terrier
203: West Highland White Terrier
204: Lhasa Apso
205: Flat-Coated Retriever
206: Curly-coated Retriever
207: Golden Retriever
208: Labrador Retriever
209: Chesapeake Bay Retriever
210: German Shorthaired Pointer
211: Vizsla
212: English Setter
213: Irish Setter
214: Gordon Setter
215: Brittany
216: Clumber Spaniel
217: English Springer Spaniel
218: Welsh Springer Spaniel
219: Cocker Spaniels
220: Sussex Spaniel
221: Irish Water Spaniel
222: Kuvasz
223: Schipperke
224: Groenendael
225: Malinois
226: Briard
227: Australian Kelpie
228: Komondor
229: Old English Sheepdog
230: Shetland Sheepdog
231: collie
232: Border Collie
233: Bouvier des Flandres
234: Rottweiler
235: German Shepherd Dog
236: Dobermann
237: Miniature Pinscher
238: Greater Swiss Mountain Dog
239: Bernese Mountain Dog
240: Appenzeller Sennenhund
241: Entlebucher Sennenhund
242: Boxer
243: Bullmastiff
244: Tibetan Mastiff
245: French Bulldog
246: Great Dane
247: St. Bernard
248: husky
249: Alaskan Malamute
250: Siberian Husky
251: Dalmatian
252: Affenpinscher
253: Basenji
254: pug
255: Leonberger
256: Newfoundland
257: Pyrenean Mountain Dog
258: Samoyed
259: Pomeranian
260: Chow Chow
261: Keeshond
262: Griffon Bruxellois
263: Pembroke Welsh Corgi
264: Cardigan Welsh Corgi
265: Toy Poodle
266: Miniature Poodle
267: Standard Poodle
268: Mexican hairless dog
269: grey wolf
270: Alaskan tundra wolf
271: red wolf
272: coyote
273: dingo
274: dhole
275: African wild dog
276: hyena
277: red fox
278: kit fox
279: Arctic fox
280: grey fox
281: tabby cat
282: tiger cat
283: Persian cat
284: Siamese cat
285: Egyptian Mau
286: cougar
287: lynx
288: leopard
289: snow leopard
290: jaguar
291: lion
292: tiger
293: cheetah
294: brown bear
295: American black bear
296: polar bear
297: sloth bear
298: mongoose
299: meerkat
300: tiger beetle
301: ladybug
302: ground beetle
303: longhorn beetle
304: leaf beetle
305: dung beetle
306: rhinoceros beetle
307: weevil
308: fly
309: bee
310: ant
311: grasshopper
312: cricket
313: stick insect
314: cockroach
315: mantis
316: cicada
317: leafhopper
318: lacewing
319: dragonfly
320: damselfly
321: red admiral
322: ringlet
323: monarch butterfly
324: small white
325: sulphur butterfly
326: gossamer-winged butterfly
327: starfish
328: sea urchin
329: sea cucumber
330: cottontail rabbit
331: hare
332: Angora rabbit
333: hamster
334: porcupine
335: fox squirrel
336: marmot
337: beaver
338: guinea pig
339: common sorrel
340: zebra
341: pig
342: wild boar
343: warthog
344: hippopotamus
345: ox
346: water buffalo
347: bison
348: ram
349: bighorn sheep
350: Alpine ibex
351: hartebeest
352: impala
353: gazelle
354: dromedary
355: llama
356: weasel
357: mink
358: European polecat
359: black-footed ferret
360: otter
361: skunk
362: badger
363: armadillo
364: three-toed sloth
365: orangutan
366: gorilla
367: chimpanzee
368: gibbon
369: siamang
370: guenon
371: patas monkey
372: baboon
373: macaque
374: langur
375: black-and-white colobus
376: proboscis monkey
377: marmoset
378: white-headed capuchin
379: howler monkey
380: titi
381: Geoffroy's spider monkey
382: common squirrel monkey
383: ring-tailed lemur
384: indri
385: Asian elephant
386: African bush elephant
387: red panda
388: giant panda
389: snoek
390: eel
391: coho salmon
392: rock beauty
393: clownfish
394: sturgeon
395: garfish
396: lionfish
397: pufferfish
398: abacus
399: abaya
400: academic gown
401: accordion
402: acoustic guitar
403: aircraft carrier
404: airliner
405: airship
406: altar
407: ambulance
408: amphibious vehicle
409: analog clock
410: apiary
411: apron
412: waste container
413: assault rifle
414: backpack
415: bakery
416: balance beam
417: balloon
418: ballpoint pen
419: Band-Aid
420: banjo
421: baluster
422: barbell
423: barber chair
424: barbershop
425: barn
426: barometer
427: barrel
428: wheelbarrow
429: baseball
430: basketball
431: bassinet
432: bassoon
433: swimming cap
434: bath towel
435: bathtub
436: station wagon
437: lighthouse
438: beaker
439: military cap
440: beer bottle
441: beer glass
442: bell-cot
443: bib
444: tandem bicycle
445: bikini
446: ring binder
447: binoculars
448: birdhouse
449: boathouse
450: bobsleigh
451: bolo tie
452: poke bonnet
453: bookcase
454: bookstore
455: bottle cap
456: bow
457: bow tie
458: brass
459: bra
460: breakwater
461: breastplate
462: broom
463: bucket
464: buckle
465: bulletproof vest
466: high-speed train
467: butcher shop
468: taxicab
469: cauldron
470: candle
471: cannon
472: canoe
473: can opener
474: cardigan
475: car mirror
476: carousel
477: tool kit
478: carton
479: car wheel
480: automated teller machine
481: cassette
482: cassette player
483: castle
484: catamaran
485: CD player
486: cello
487: mobile phone
488: chain
489: chain-link fence
490: chain mail
491: chainsaw
492: chest
493: chiffonier
494: chime
495: china cabinet
496: Christmas stocking
497: church
498: movie theater
499: cleaver
500: cliff dwelling
501: cloak
502: clogs
503: cocktail shaker
504: coffee mug
505: coffeemaker
506: coil
507: combination lock
508: computer keyboard
509: confectionery store
510: container ship
511: convertible
512: corkscrew
513: cornet
514: cowboy boot
515: cowboy hat
516: cradle
517: crane (machine)
518: crash helmet
519: crate
520: infant bed
521: Crock Pot
522: croquet ball
523: crutch
524: cuirass
525: dam
526: desk
527: desktop computer
528: rotary dial telephone
529: diaper
530: digital clock
531: digital watch
532: dining table
533: dishcloth
534: dishwasher
535: disc brake
536: dock
537: dog sled
538: dome
539: doormat
540: drilling rig
541: drum
542: drumstick
543: dumbbell
544: Dutch oven
545: electric fan
546: electric guitar
547: electric locomotive
548: entertainment center
549: envelope
550: espresso machine
551: face powder
552: feather boa
553: filing cabinet
554: fireboat
555: fire engine
556: fire screen sheet
557: flagpole
558: flute
559: folding chair
560: football helmet
561: forklift
562: fountain
563: fountain pen
564: four-poster bed
565: freight car
566: French horn
567: frying pan
568: fur coat
569: garbage truck
570: gas mask
571: gas pump
572: goblet
573: go-kart
574: golf ball
575: golf cart
576: gondola
577: gong
578: gown
579: grand piano
580: greenhouse
581: grille
582: grocery store
583: guillotine
584: barrette
585: hair spray
586: half-track
587: hammer
588: hamper
589: hair dryer
590: hand-held computer
591: handkerchief
592: hard disk drive
593: harmonica
594: harp
595: harvester
596: hatchet
597: holster
598: home theater
599: honeycomb
600: hook
601: hoop skirt
602: horizontal bar
603: horse-drawn vehicle
604: hourglass
605: iPod
606: clothes iron
607: jack-o'-lantern
608: jeans
609: jeep
610: T-shirt
611: jigsaw puzzle
612: pulled rickshaw
613: joystick
614: kimono
615: knee pad
616: knot
617: lab coat
618: ladle
619: lampshade
620: laptop computer
621: lawn mower
622: lens cap
623: paper knife
624: library
625: lifeboat
626: lighter
627: limousine
628: ocean liner
629: lipstick
630: slip-on shoe
631: lotion
632: speaker
633: loupe
634: sawmill
635: magnetic compass
636: mail bag
637: mailbox
638: tights
639: tank suit
640: manhole cover
641: maraca
642: marimba
643: mask
644: match
645: maypole
646: maze
647: measuring cup
648: medicine chest
649: megalith
650: microphone
651: microwave oven
652: military uniform
653: milk can
654: minibus
655: miniskirt
656: minivan
657: missile
658: mitten
659: mixing bowl
660: mobile home
661: Model T
662: modem
663: monastery
664: monitor
665: moped
666: mortar
667: square academic cap
668: mosque
669: mosquito net
670: scooter
671: mountain bike
672: tent
673: computer mouse
674: mousetrap
675: moving van
676: muzzle
677: nail
678: neck brace
679: necklace
680: nipple
681: notebook computer
682: obelisk
683: oboe
684: ocarina
685: odometer
686: oil filter
687: organ
688: oscilloscope
689: overskirt
690: bullock cart
691: oxygen mask
692: packet
693: paddle
694: paddle wheel
695: padlock
696: paintbrush
697: pajamas
698: palace
699: pan flute
700: paper towel
701: parachute
702: parallel bars
703: park bench
704: parking meter
705: passenger car
706: patio
707: payphone
708: pedestal
709: pencil case
710: pencil sharpener
711: perfume
712: Petri dish
713: photocopier
714: plectrum
715: Pickelhaube
716: picket fence
717: pickup truck
718: pier
719: piggy bank
720: pill bottle
721: pillow
722: ping-pong ball
723: pinwheel
724: pirate ship
725: pitcher
726: hand plane
727: planetarium
728: plastic bag
729: plate rack
730: plow
731: plunger
732: Polaroid camera
733: pole
734: police van
735: poncho
736: billiard table
737: soda bottle
738: pot
739: potter's wheel
740: power drill
741: prayer rug
742: printer
743: prison
744: projectile
745: projector
746: hockey puck
747: punching bag
748: purse
749: quill
750: quilt
751: race car
752: racket
753: radiator
754: radio
755: radio telescope
756: rain barrel
757: recreational vehicle
758: reel
759: reflex camera
760: refrigerator
761: remote control
762: restaurant
763: revolver
764: rifle
765: rocking chair
766: rotisserie
767: eraser
768: rugby ball
769: ruler
770: running shoe
771: safe
772: safety pin
773: salt shaker
774: sandal
775: sarong
776: saxophone
777: scabbard
778: weighing scale
779: school bus
780: schooner
781: scoreboard
782: CRT screen
783: screw
784: screwdriver
785: seat belt
786: sewing machine
787: shield
788: shoe store
789: shoji
790: shopping basket
791: shopping cart
792: shovel
793: shower cap
794: shower curtain
795: ski
796: ski mask
797: sleeping bag
798: slide rule
799: sliding door
800: slot machine
801: snorkel
802: snowmobile
803: snowplow
804: soap dispenser
805: soccer ball
806: sock
807: solar thermal collector
808: sombrero
809: soup bowl
810: space bar
811: space heater
812: space shuttle
813: spatula
814: motorboat
815: spider web
816: spindle
817: sports car
818: spotlight
819: stage
820: steam locomotive
821: through arch bridge
822: steel drum
823: stethoscope
824: scarf
825: stone wall
826: stopwatch
827: stove
828: strainer
829: tram
830: stretcher
831: couch
832: stupa
833: submarine
834: suit
835: sundial
836: sunglass
837: sunglasses
838: sunscreen
839: suspension bridge
840: mop
841: sweatshirt
842: swimsuit
843: swing
844: switch
845: syringe
846: table lamp
847: tank
848: tape player
849: teapot
850: teddy bear
851: television
852: tennis ball
853: thatched roof
854: front curtain
855: thimble
856: threshing machine
857: throne
858: tile roof
859: toaster
860: tobacco shop
861: toilet seat
862: torch
863: totem pole
864: tow truck
865: toy store
866: tractor
867: semi-trailer truck
868: tray
869: trench coat
870: tricycle
871: trimaran
872: tripod
873: triumphal arch
874: trolleybus
875: trombone
876: tub
877: turnstile
878: typewriter keyboard
879: umbrella
880: unicycle
881: upright piano
882: vacuum cleaner
883: vase
884: vault
885: velvet
886: vending machine
887: vestment
888: viaduct
889: violin
890: volleyball
891: waffle iron
892: wall clock
893: wallet
894: wardrobe
895: military aircraft
896: sink
897: washing machine
898: water bottle
899: water jug
900: water tower
901: whiskey jug
902: whistle
903: wig
904: window screen
905: window shade
906: Windsor tie
907: wine bottle
908: wing
909: wok
910: wooden spoon
911: wool
912: split-rail fence
913: shipwreck
914: yawl
915: yurt
916: website
917: comic book
918: crossword
919: traffic sign
920: traffic light
921: dust jacket
922: menu
923: plate
924: guacamole
925: consomme
926: hot pot
927: trifle
928: ice cream
929: ice pop
930: baguette
931: bagel
932: pretzel
933: cheeseburger
934: hot dog
935: mashed potato
936: cabbage
937: broccoli
938: cauliflower
939: zucchini
940: spaghetti squash
941: acorn squash
942: butternut squash
943: cucumber
944: artichoke
945: bell pepper
946: cardoon
947: mushroom
948: Granny Smith
949: strawberry
950: orange
951: lemon
952: fig
953: pineapple
954: banana
955: jackfruit
956: custard apple
957: pomegranate
958: hay
959: carbonara
960: chocolate syrup
961: dough
962: meatloaf
963: pizza
964: pot pie
965: burrito
966: red wine
967: espresso
968: cup
969: eggnog
970: alp
971: bubble
972: cliff
973: coral reef
974: geyser
975: lakeshore
976: promontory
977: shoal
978: seashore
979: valley
980: volcano
981: baseball player
982: bridegroom
983: scuba diver
984: rapeseed
985: daisy
986: yellow lady's slipper
987: corn
988: acorn
989: rose hip
990: horse chestnut seed
991: coral fungus
992: agaric
993: gyromitra
994: stinkhorn mushroom
995: earth star
996: hen-of-the-woods
997: bolete
998: ear
999: toilet paper
# Download script/URL (optional)
download: data/scripts/get_imagenet1000.sh
================================================
FILE: data/Objects365.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Objects365 dataset https://www.objects365.org/ by Megvii
# Example usage: python train.py --data Objects365.yaml
# parent
# ├── yolov5
# └── datasets
# └── Objects365 ← downloads here (712 GB = 367G data + 345G zips)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/Objects365 # dataset root dir
train: images/train # train images (relative to 'path') 1742289 images
val: images/val # val images (relative to 'path') 80000 images
test: # test images (optional)
# Classes
names:
0: Person
1: Sneakers
2: Chair
3: Other Shoes
4: Hat
5: Car
6: Lamp
7: Glasses
8: Bottle
9: Desk
10: Cup
11: Street Lights
12: Cabinet/shelf
13: Handbag/Satchel
14: Bracelet
15: Plate
16: Picture/Frame
17: Helmet
18: Book
19: Gloves
20: Storage box
21: Boat
22: Leather Shoes
23: Flower
24: Bench
25: Potted Plant
26: Bowl/Basin
27: Flag
28: Pillow
29: Boots
30: Vase
31: Microphone
32: Necklace
33: Ring
34: SUV
35: Wine Glass
36: Belt
37: Monitor/TV
38: Backpack
39: Umbrella
40: Traffic Light
41: Speaker
42: Watch
43: Tie
44: Trash bin Can
45: Slippers
46: Bicycle
47: Stool
48: Barrel/bucket
49: Van
50: Couch
51: Sandals
52: Basket
53: Drum
54: Pen/Pencil
55: Bus
56: Wild Bird
57: High Heels
58: Motorcycle
59: Guitar
60: Carpet
61: Cell Phone
62: Bread
63: Camera
64: Canned
65: Truck
66: Traffic cone
67: Cymbal
68: Lifesaver
69: Towel
70: Stuffed Toy
71: Candle
72: Sailboat
73: Laptop
74: Awning
75: Bed
76: Faucet
77: Tent
78: Horse
79: Mirror
80: Power outlet
81: Sink
82: Apple
83: Air Conditioner
84: Knife
85: Hockey Stick
86: Paddle
87: Pickup Truck
88: Fork
89: Traffic Sign
90: Balloon
91: Tripod
92: Dog
93: Spoon
94: Clock
95: Pot
96: Cow
97: Cake
98: Dinning Table
99: Sheep
100: Hanger
101: Blackboard/Whiteboard
102: Napkin
103: Other Fish
104: Orange/Tangerine
105: Toiletry
106: Keyboard
107: Tomato
108: Lantern
109: Machinery Vehicle
110: Fan
111: Green Vegetables
112: Banana
113: Baseball Glove
114: Airplane
115: Mouse
116: Train
117: Pumpkin
118: Soccer
119: Skiboard
120: Luggage
121: Nightstand
122: Tea pot
123: Telephone
124: Trolley
125: Head Phone
126: Sports Car
127: Stop Sign
128: Dessert
129: Scooter
130: Stroller
131: Crane
132: Remote
133: Refrigerator
134: Oven
135: Lemon
136: Duck
137: Baseball Bat
138: Surveillance Camera
139: Cat
140: Jug
141: Broccoli
142: Piano
143: Pizza
144: Elephant
145: Skateboard
146: Surfboard
147: Gun
148: Skating and Skiing shoes
149: Gas stove
150: Donut
151: Bow Tie
152: Carrot
153: Toilet
154: Kite
155: Strawberry
156: Other Balls
157: Shovel
158: Pepper
159: Computer Box
160: Toilet Paper
161: Cleaning Products
162: Chopsticks
163: Microwave
164: Pigeon
165: Baseball
166: Cutting/chopping Board
167: Coffee Table
168: Side Table
169: Scissors
170: Marker
171: Pie
172: Ladder
173: Snowboard
174: Cookies
175: Radiator
176: Fire Hydrant
177: Basketball
178: Zebra
179: Grape
180: Giraffe
181: Potato
182: Sausage
183: Tricycle
184: Violin
185: Egg
186: Fire Extinguisher
187: Candy
188: Fire Truck
189: Billiards
190: Converter
191: Bathtub
192: Wheelchair
193: Golf Club
194: Briefcase
195: Cucumber
196: Cigar/Cigarette
197: Paint Brush
198: Pear
199: Heavy Truck
200: Hamburger
201: Extractor
202: Extension Cord
203: Tong
204: Tennis Racket
205: Folder
206: American Football
207: earphone
208: Mask
209: Kettle
210: Tennis
211: Ship
212: Swing
213: Coffee Machine
214: Slide
215: Carriage
216: Onion
217: Green beans
218: Projector
219: Frisbee
220: Washing Machine/Drying Machine
221: Chicken
222: Printer
223: Watermelon
224: Saxophone
225: Tissue
226: Toothbrush
227: Ice cream
228: Hot-air balloon
229: Cello
230: French Fries
231: Scale
232: Trophy
233: Cabbage
234: Hot dog
235: Blender
236: Peach
237: Rice
238: Wallet/Purse
239: Volleyball
240: Deer
241: Goose
242: Tape
243: Tablet
244: Cosmetics
245: Trumpet
246: Pineapple
247: Golf Ball
248: Ambulance
249: Parking meter
250: Mango
251: Key
252: Hurdle
253: Fishing Rod
254: Medal
255: Flute
256: Brush
257: Penguin
258: Megaphone
259: Corn
260: Lettuce
261: Garlic
262: Swan
263: Helicopter
264: Green Onion
265: Sandwich
266: Nuts
267: Speed Limit Sign
268: Induction Cooker
269: Broom
270: Trombone
271: Plum
272: Rickshaw
273: Goldfish
274: Kiwi fruit
275: Router/modem
276: Poker Card
277: Toaster
278: Shrimp
279: Sushi
280: Cheese
281: Notepaper
282: Cherry
283: Pliers
284: CD
285: Pasta
286: Hammer
287: Cue
288: Avocado
289: Hamimelon
290: Flask
291: Mushroom
292: Screwdriver
293: Soap
294: Recorder
295: Bear
296: Eggplant
297: Board Eraser
298: Coconut
299: Tape Measure/Ruler
300: Pig
301: Showerhead
302: Globe
303: Chips
304: Steak
305: Crosswalk Sign
306: Stapler
307: Camel
308: Formula 1
309: Pomegranate
310: Dishwasher
311: Crab
312: Hoverboard
313: Meat ball
314: Rice Cooker
315: Tuba
316: Calculator
317: Papaya
318: Antelope
319: Parrot
320: Seal
321: Butterfly
322: Dumbbell
323: Donkey
324: Lion
325: Urinal
326: Dolphin
327: Electric Drill
328: Hair Dryer
329: Egg tart
330: Jellyfish
331: Treadmill
332: Lighter
333: Grapefruit
334: Game board
335: Mop
336: Radish
337: Baozi
338: Target
339: French
340: Spring Rolls
341: Monkey
342: Rabbit
343: Pencil Case
344: Yak
345: Red Cabbage
346: Binoculars
347: Asparagus
348: Barbell
349: Scallop
350: Noddles
351: Comb
352: Dumpling
353: Oyster
354: Table Tennis paddle
355: Cosmetics Brush/Eyeliner Pencil
356: Chainsaw
357: Eraser
358: Lobster
359: Durian
360: Okra
361: Lipstick
362: Cosmetics Mirror
363: Curling
364: Table Tennis
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
from tqdm import tqdm
from utils.general import Path, check_requirements, download, np, xyxy2xywhn
check_requirements('pycocotools>=2.0')
from pycocotools.coco import COCO
# Make Directories
dir = Path(yaml['path']) # dataset root dir
for p in 'images', 'labels':
(dir / p).mkdir(parents=True, exist_ok=True)
for q in 'train', 'val':
(dir / p / q).mkdir(parents=True, exist_ok=True)
# Train, Val Splits
for split, patches in [('train', 50 + 1), ('val', 43 + 1)]:
print(f"Processing {split} in {patches} patches ...")
images, labels = dir / 'images' / split, dir / 'labels' / split
# Download
url = f"https://dorc.ks3-cn-beijing.ksyun.com/data-set/2020Objects365%E6%95%B0%E6%8D%AE%E9%9B%86/{split}/"
if split == 'train':
download([f'{url}zhiyuan_objv2_{split}.tar.gz'], dir=dir, delete=False) # annotations json
download([f'{url}patch{i}.tar.gz' for i in range(patches)], dir=images, curl=True, delete=False, threads=8)
elif split == 'val':
download([f'{url}zhiyuan_objv2_{split}.json'], dir=dir, delete=False) # annotations json
download([f'{url}images/v1/patch{i}.tar.gz' for i in range(15 + 1)], dir=images, curl=True, delete=False, threads=8)
download([f'{url}images/v2/patch{i}.tar.gz' for i in range(16, patches)], dir=images, curl=True, delete=False, threads=8)
# Move
for f in tqdm(images.rglob('*.jpg'), desc=f'Moving {split} images'):
f.rename(images / f.name) # move to /images/{split}
# Labels
coco = COCO(dir / f'zhiyuan_objv2_{split}.json')
names = [x["name"] for x in coco.loadCats(coco.getCatIds())]
for cid, cat in enumerate(names):
catIds = coco.getCatIds(catNms=[cat])
imgIds = coco.getImgIds(catIds=catIds)
for im in tqdm(coco.loadImgs(imgIds), desc=f'Class {cid + 1}/{len(names)} {cat}'):
width, height = im["width"], im["height"]
path = Path(im["file_name"]) # image filename
try:
with open(labels / path.with_suffix('.txt').name, 'a') as file:
annIds = coco.getAnnIds(imgIds=im["id"], catIds=catIds, iscrowd=False)
for a in coco.loadAnns(annIds):
x, y, w, h = a['bbox'] # bounding box in xywh (xy top-left corner)
xyxy = np.array([x, y, x + w, y + h])[None] # pixels(1,4)
x, y, w, h = xyxy2xywhn(xyxy, w=width, h=height, clip=True)[0] # normalized and clipped
file.write(f"{cid} {x:.5f} {y:.5f} {w:.5f} {h:.5f}\n")
except Exception as e:
print(e)
================================================
FILE: data/SKU-110K.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# SKU-110K retail items dataset https://github.com/eg4000/SKU110K_CVPR19 by Trax Retail
# Example usage: python train.py --data SKU-110K.yaml
# parent
# ├── yolov5
# └── datasets
# └── SKU-110K ← downloads here (13.6 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/SKU-110K # dataset root dir
train: train.txt # train images (relative to 'path') 8219 images
val: val.txt # val images (relative to 'path') 588 images
test: test.txt # test images (optional) 2936 images
# Classes
names:
0: object
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
import shutil
from tqdm import tqdm
from utils.general import np, pd, Path, download, xyxy2xywh
# Download
dir = Path(yaml['path']) # dataset root dir
parent = Path(dir.parent) # download dir
urls = ['http://trax-geometry.s3.amazonaws.com/cvpr_challenge/SKU110K_fixed.tar.gz']
download(urls, dir=parent, delete=False)
# Rename directories
if dir.exists():
shutil.rmtree(dir)
(parent / 'SKU110K_fixed').rename(dir) # rename dir
(dir / 'labels').mkdir(parents=True, exist_ok=True) # create labels dir
# Convert labels
names = 'image', 'x1', 'y1', 'x2', 'y2', 'class', 'image_width', 'image_height' # column names
for d in 'annotations_train.csv', 'annotations_val.csv', 'annotations_test.csv':
x = pd.read_csv(dir / 'annotations' / d, names=names).values # annotations
images, unique_images = x[:, 0], np.unique(x[:, 0])
with open((dir / d).with_suffix('.txt').__str__().replace('annotations_', ''), 'w') as f:
f.writelines(f'./images/{s}\n' for s in unique_images)
for im in tqdm(unique_images, desc=f'Converting {dir / d}'):
cls = 0 # single-class dataset
with open((dir / 'labels' / im).with_suffix('.txt'), 'a') as f:
for r in x[images == im]:
w, h = r[6], r[7] # image width, height
xywh = xyxy2xywh(np.array([[r[1] / w, r[2] / h, r[3] / w, r[4] / h]]))[0] # instance
f.write(f"{cls} {xywh[0]:.5f} {xywh[1]:.5f} {xywh[2]:.5f} {xywh[3]:.5f}\n") # write label
================================================
FILE: data/VOC.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# PASCAL VOC dataset http://host.robots.ox.ac.uk/pascal/VOC by University of Oxford
# Example usage: python train.py --data VOC.yaml
# parent
# ├── yolov5
# └── datasets
# └── VOC ← downloads here (2.8 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/VOC
train: # train images (relative to 'path') 16551 images
- images/train2012
- images/train2007
- images/val2012
- images/val2007
val: # val images (relative to 'path') 4952 images
- images/test2007
test: # test images (optional)
- images/test2007
# Classes
names:
0: aeroplane
1: bicycle
2: bird
3: boat
4: bottle
5: bus
6: car
7: cat
8: chair
9: cow
10: diningtable
11: dog
12: horse
13: motorbike
14: person
15: pottedplant
16: sheep
17: sofa
18: train
19: tvmonitor
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
import xml.etree.ElementTree as ET
from tqdm import tqdm
from utils.general import download, Path
def convert_label(path, lb_path, year, image_id):
def convert_box(size, box):
dw, dh = 1. / size[0], 1. / size[1]
x, y, w, h = (box[0] + box[1]) / 2.0 - 1, (box[2] + box[3]) / 2.0 - 1, box[1] - box[0], box[3] - box[2]
return x * dw, y * dh, w * dw, h * dh
in_file = open(path / f'VOC{year}/Annotations/{image_id}.xml')
out_file = open(lb_path, 'w')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
names = list(yaml['names'].values()) # names list
for obj in root.iter('object'):
cls = obj.find('name').text
if cls in names and int(obj.find('difficult').text) != 1:
xmlbox = obj.find('bndbox')
bb = convert_box((w, h), [float(xmlbox.find(x).text) for x in ('xmin', 'xmax', 'ymin', 'ymax')])
cls_id = names.index(cls) # class id
out_file.write(" ".join([str(a) for a in (cls_id, *bb)]) + '\n')
# Download
dir = Path(yaml['path']) # dataset root dir
url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
urls = [f'{url}VOCtrainval_06-Nov-2007.zip', # 446MB, 5012 images
f'{url}VOCtest_06-Nov-2007.zip', # 438MB, 4953 images
f'{url}VOCtrainval_11-May-2012.zip'] # 1.95GB, 17126 images
download(urls, dir=dir / 'images', delete=False, curl=True, threads=3)
# Convert
path = dir / 'images/VOCdevkit'
for year, image_set in ('2012', 'train'), ('2012', 'val'), ('2007', 'train'), ('2007', 'val'), ('2007', 'test'):
imgs_path = dir / 'images' / f'{image_set}{year}'
lbs_path = dir / 'labels' / f'{image_set}{year}'
imgs_path.mkdir(exist_ok=True, parents=True)
lbs_path.mkdir(exist_ok=True, parents=True)
with open(path / f'VOC{year}/ImageSets/Main/{image_set}.txt') as f:
image_ids = f.read().strip().split()
for id in tqdm(image_ids, desc=f'{image_set}{year}'):
f = path / f'VOC{year}/JPEGImages/{id}.jpg' # old img path
lb_path = (lbs_path / f.name).with_suffix('.txt') # new label path
f.rename(imgs_path / f.name) # move image
convert_label(path, lb_path, year, id) # convert labels to YOLO format
================================================
FILE: data/VisDrone.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# VisDrone2019-DET dataset https://github.com/VisDrone/VisDrone-Dataset by Tianjin University
# Example usage: python train.py --data VisDrone.yaml
# parent
# ├── yolov5
# └── datasets
# └── VisDrone ← downloads here (2.3 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/VisDrone # dataset root dir
train: VisDrone2019-DET-train/images # train images (relative to 'path') 6471 images
val: VisDrone2019-DET-val/images # val images (relative to 'path') 548 images
test: VisDrone2019-DET-test-dev/images # test images (optional) 1610 images
# Classes
names:
0: pedestrian
1: people
2: bicycle
3: car
4: van
5: truck
6: tricycle
7: awning-tricycle
8: bus
9: motor
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
from utils.general import download, os, Path
def visdrone2yolo(dir):
from PIL import Image
from tqdm import tqdm
def convert_box(size, box):
# Convert VisDrone box to YOLO xywh box
dw = 1. / size[0]
dh = 1. / size[1]
return (box[0] + box[2] / 2) * dw, (box[1] + box[3] / 2) * dh, box[2] * dw, box[3] * dh
(dir / 'labels').mkdir(parents=True, exist_ok=True) # make labels directory
pbar = tqdm((dir / 'annotations').glob('*.txt'), desc=f'Converting {dir}')
for f in pbar:
img_size = Image.open((dir / 'images' / f.name).with_suffix('.jpg')).size
lines = []
with open(f, 'r') as file: # read annotation.txt
for row in [x.split(',') for x in file.read().strip().splitlines()]:
if row[4] == '0': # VisDrone 'ignored regions' class 0
continue
cls = int(row[5]) - 1
box = convert_box(img_size, tuple(map(int, row[:4])))
lines.append(f"{cls} {' '.join(f'{x:.6f}' for x in box)}\n")
with open(str(f).replace(os.sep + 'annotations' + os.sep, os.sep + 'labels' + os.sep), 'w') as fl:
fl.writelines(lines) # write label.txt
# Download
dir = Path(yaml['path']) # dataset root dir
urls = ['https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-train.zip',
'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-val.zip',
'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-test-dev.zip',
'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-test-challenge.zip']
download(urls, dir=dir, curl=True, threads=4)
# Convert
for d in 'VisDrone2019-DET-train', 'VisDrone2019-DET-val', 'VisDrone2019-DET-test-dev':
visdrone2yolo(dir / d) # convert VisDrone annotations to YOLO labels
================================================
FILE: data/coco.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# COCO 2017 dataset http://cocodataset.org by Microsoft
# Example usage: python train.py --data coco.yaml
# parent
# ├── yolov5
# └── datasets
# └── coco ← downloads here (20.1 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/coco # dataset root dir
train: train2017.txt # train images (relative to 'path') 118287 images
val: val2017.txt # val images (relative to 'path') 5000 images
test: test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
# Classes
names:
0: person
1: bicycle
2: car
3: motorcycle
4: airplane
5: bus
6: train
7: truck
8: boat
9: traffic light
10: fire hydrant
11: stop sign
12: parking meter
13: bench
14: bird
15: cat
16: dog
17: horse
18: sheep
19: cow
20: elephant
21: bear
22: zebra
23: giraffe
24: backpack
25: umbrella
26: handbag
27: tie
28: suitcase
29: frisbee
30: skis
31: snowboard
32: sports ball
33: kite
34: baseball bat
35: baseball glove
36: skateboard
37: surfboard
38: tennis racket
39: bottle
40: wine glass
41: cup
42: fork
43: knife
44: spoon
45: bowl
46: banana
47: apple
48: sandwich
49: orange
50: broccoli
51: carrot
52: hot dog
53: pizza
54: donut
55: cake
56: chair
57: couch
58: potted plant
59: bed
60: dining table
61: toilet
62: tv
63: laptop
64: mouse
65: remote
66: keyboard
67: cell phone
68: microwave
69: oven
70: toaster
71: sink
72: refrigerator
73: book
74: clock
75: vase
76: scissors
77: teddy bear
78: hair drier
79: toothbrush
# Download script/URL (optional)
download: |
from utils.general import download, Path
# Download labels
segments = False # segment or box labels
dir = Path(yaml['path']) # dataset root dir
url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
urls = [url + ('coco2017labels-segments.zip' if segments else 'coco2017labels.zip')] # labels
download(urls, dir=dir.parent)
# Download data
urls = ['http://images.cocodataset.org/zips/train2017.zip', # 19G, 118k images
'http://images.cocodataset.org/zips/val2017.zip', # 1G, 5k images
'http://images.cocodataset.org/zips/test2017.zip'] # 7G, 41k images (optional)
download(urls, dir=dir / 'images', threads=3)
================================================
FILE: data/coco128-seg.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# COCO128-seg dataset https://www.kaggle.com/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
# Example usage: python train.py --data coco128.yaml
# parent
# ├── yolov5
# └── datasets
# └── coco128-seg ← downloads here (7 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/coco128-seg # dataset root dir
train: images/train2017 # train images (relative to 'path') 128 images
val: images/train2017 # val images (relative to 'path') 128 images
test: # test images (optional)
# Classes
names:
0: person
1: bicycle
2: car
3: motorcycle
4: airplane
5: bus
6: train
7: truck
8: boat
9: traffic light
10: fire hydrant
11: stop sign
12: parking meter
13: bench
14: bird
15: cat
16: dog
17: horse
18: sheep
19: cow
20: elephant
21: bear
22: zebra
23: giraffe
24: backpack
25: umbrella
26: handbag
27: tie
28: suitcase
29: frisbee
30: skis
31: snowboard
32: sports ball
33: kite
34: baseball bat
35: baseball glove
36: skateboard
37: surfboard
38: tennis racket
39: bottle
40: wine glass
41: cup
42: fork
43: knife
44: spoon
45: bowl
46: banana
47: apple
48: sandwich
49: orange
50: broccoli
51: carrot
52: hot dog
53: pizza
54: donut
55: cake
56: chair
57: couch
58: potted plant
59: bed
60: dining table
61: toilet
62: tv
63: laptop
64: mouse
65: remote
66: keyboard
67: cell phone
68: microwave
69: oven
70: toaster
71: sink
72: refrigerator
73: book
74: clock
75: vase
76: scissors
77: teddy bear
78: hair drier
79: toothbrush
# Download script/URL (optional)
download: https://ultralytics.com/assets/coco128-seg.zip
================================================
FILE: data/coco128.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# COCO128 dataset https://www.kaggle.com/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
# Example usage: python train.py --data coco128.yaml
# parent
# ├── yolov5
# └── datasets
# └── coco128 ← downloads here (7 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/coco128 # dataset root dir
train: images/train2017 # train images (relative to 'path') 128 images
val: images/train2017 # val images (relative to 'path') 128 images
test: # test images (optional)
# Classes
names:
0: person
1: bicycle
2: car
3: motorcycle
4: airplane
5: bus
6: train
7: truck
8: boat
9: traffic light
10: fire hydrant
11: stop sign
12: parking meter
13: bench
14: bird
15: cat
16: dog
17: horse
18: sheep
19: cow
20: elephant
21: bear
22: zebra
23: giraffe
24: backpack
25: umbrella
26: handbag
27: tie
28: suitcase
29: frisbee
30: skis
31: snowboard
32: sports ball
33: kite
34: baseball bat
35: baseball glove
36: skateboard
37: surfboard
38: tennis racket
39: bottle
40: wine glass
41: cup
42: fork
43: knife
44: spoon
45: bowl
46: banana
47: apple
48: sandwich
49: orange
50: broccoli
51: carrot
52: hot dog
53: pizza
54: donut
55: cake
56: chair
57: couch
58: potted plant
59: bed
60: dining table
61: toilet
62: tv
63: laptop
64: mouse
65: remote
66: keyboard
67: cell phone
68: microwave
69: oven
70: toaster
71: sink
72: refrigerator
73: book
74: clock
75: vase
76: scissors
77: teddy bear
78: hair drier
79: toothbrush
# Download script/URL (optional)
download: https://ultralytics.com/assets/coco128.zip
================================================
FILE: data/hyps/hyp.Objects365.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for Objects365 training
# python train.py --weights yolov5m.pt --data Objects365.yaml --evolve
# See Hyperparameter Evolution tutorial for details https://github.com/ultralytics/yolov5#tutorials
lr0: 0.00258
lrf: 0.17
momentum: 0.779
weight_decay: 0.00058
warmup_epochs: 1.33
warmup_momentum: 0.86
warmup_bias_lr: 0.0711
box: 0.0539
cls: 0.299
cls_pw: 0.825
obj: 0.632
obj_pw: 1.0
iou_t: 0.2
anchor_t: 3.44
anchors: 3.2
fl_gamma: 0.0
hsv_h: 0.0188
hsv_s: 0.704
hsv_v: 0.36
degrees: 0.0
translate: 0.0902
scale: 0.491
shear: 0.0
perspective: 0.0
flipud: 0.0
fliplr: 0.5
mosaic: 1.0
mixup: 0.0
copy_paste: 0.0
================================================
FILE: data/hyps/hyp.VOC.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for VOC training
# python train.py --batch 128 --weights yolov5m6.pt --data VOC.yaml --epochs 50 --img 512 --hyp hyp.scratch-med.yaml --evolve
# See Hyperparameter Evolution tutorial for details https://github.com/ultralytics/yolov5#tutorials
# YOLOv5 Hyperparameter Evolution Results
# Best generation: 467
# Last generation: 996
# metrics/precision, metrics/recall, metrics/mAP_0.5, metrics/mAP_0.5:0.95, val/box_loss, val/obj_loss, val/cls_loss
# 0.87729, 0.85125, 0.91286, 0.72664, 0.0076739, 0.0042529, 0.0013865
lr0: 0.00334
lrf: 0.15135
momentum: 0.74832
weight_decay: 0.00025
warmup_epochs: 3.3835
warmup_momentum: 0.59462
warmup_bias_lr: 0.18657
box: 0.02
cls: 0.21638
cls_pw: 0.5
obj: 0.51728
obj_pw: 0.67198
iou_t: 0.2
anchor_t: 3.3744
fl_gamma: 0.0
hsv_h: 0.01041
hsv_s: 0.54703
hsv_v: 0.27739
degrees: 0.0
translate: 0.04591
scale: 0.75544
shear: 0.0
perspective: 0.0
flipud: 0.0
fliplr: 0.5
mosaic: 0.85834
mixup: 0.04266
copy_paste: 0.0
anchors: 3.412
================================================
FILE: data/hyps/hyp.no-augmentation.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters when using Albumentations frameworks
# python train.py --hyp hyp.no-augmentation.yaml
# See https://github.com/ultralytics/yolov5/pull/3882 for YOLOv5 + Albumentations Usage examples
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
# this parameters are all zero since we want to use albumentation framework
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0 # image HSV-Hue augmentation (fraction)
hsv_s: 0 # image HSV-Saturation augmentation (fraction)
hsv_v: 0 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0 # image translation (+/- fraction)
scale: 0 # image scale (+/- gain)
shear: 0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.0 # image flip left-right (probability)
mosaic: 0.0 # image mosaic (probability)
mixup: 0.0 # image mixup (probability)
copy_paste: 0.0 # segment copy-paste (probability)
================================================
FILE: data/hyps/hyp.scratch-high.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for high-augmentation COCO training from scratch
# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.9 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.1 # image mixup (probability)
copy_paste: 0.1 # segment copy-paste (probability)
================================================
FILE: data/hyps/hyp.scratch-low.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for low-augmentation COCO training from scratch
# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.5 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 1.0 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.5 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.0 # image mixup (probability)
copy_paste: 0.0 # segment copy-paste (probability)
================================================
FILE: data/hyps/hyp.scratch-med.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for medium-augmentation COCO training from scratch
# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.9 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.1 # image mixup (probability)
copy_paste: 0.0 # segment copy-paste (probability)
================================================
FILE: data/scripts/download_weights.sh
================================================
#!/bin/bash
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Download latest models from https://github.com/ultralytics/yolov5/releases
# Example usage: bash data/scripts/download_weights.sh
# parent
# └── yolov5
# ├── yolov5s.pt ← downloads here
# ├── yolov5m.pt
# └── ...
python - <\n",
"\n",
"\n",
"\n",
"
\n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "6Qu7Iesl0p54"
},
"source": [
"# Status\n",
"\n",
"\n",
"\n",
"If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "IEijrePND_2I"
},
"source": [
"# Appendix\n",
"\n",
"Additional content below."
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"id": "GMusP4OAxFu6"
},
"outputs": [],
"source": [
"# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
"import torch\n",
"\n",
"model = torch.hub.load('ultralytics/yolov5', 'yolov5s', force_reload=True, trust_repo=True) # or yolov5n - yolov5x6 or custom\n",
"im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
"results = model(im) # inference\n",
"results.print() # or .show(), .save(), .crop(), .pandas(), etc."
]
}
],
"metadata": {
"accelerator": "GPU",
"colab": {
"name": "YOLOv5 Classification Tutorial",
"provenance": []
},
"kernelspec": {
"display_name": "Python 3 (ipykernel)",
"language": "python",
"name": "python3"
},
"language_info": {
"codemirror_mode": {
"name": "ipython",
"version": 3
},
"file_extension": ".py",
"mimetype": "text/x-python",
"name": "python",
"nbconvert_exporter": "python",
"pygments_lexer": "ipython3",
"version": "3.7.12"
}
},
"nbformat": 4,
"nbformat_minor": 0
}
================================================
FILE: classify/val.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""
Validate a trained YOLOv5 classification model on a classification dataset.
Usage:
$ bash data/scripts/get_imagenet.sh --val # download ImageNet val split (6.3G, 50000 images)
$ python classify/val.py --weights yolov5m-cls.pt --data ../datasets/imagenet --img 224 # validate ImageNet
Usage - formats:
$ python classify/val.py --weights yolov5s-cls.pt # PyTorch
yolov5s-cls.torchscript # TorchScript
yolov5s-cls.onnx # ONNX Runtime or OpenCV DNN with --dnn
yolov5s-cls_openvino_model # OpenVINO
yolov5s-cls.engine # TensorRT
yolov5s-cls.mlmodel # CoreML (macOS-only)
yolov5s-cls_saved_model # TensorFlow SavedModel
yolov5s-cls.pb # TensorFlow GraphDef
yolov5s-cls.tflite # TensorFlow Lite
yolov5s-cls_edgetpu.tflite # TensorFlow Edge TPU
yolov5s-cls_paddle_model # PaddlePaddle
"""
import argparse
import os
import sys
from pathlib import Path
import torch
from tqdm import tqdm
FILE = Path(__file__).resolve()
ROOT = FILE.parents[1] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
from models.common import DetectMultiBackend
from utils.dataloaders import create_classification_dataloader
from utils.general import (
LOGGER,
TQDM_BAR_FORMAT,
Profile,
check_img_size,
check_requirements,
colorstr,
increment_path,
print_args,
)
from utils.torch_utils import select_device, smart_inference_mode
@smart_inference_mode()
def run(
data=ROOT / "../datasets/mnist", # dataset dir
weights=ROOT / "yolov5s-cls.pt", # model.pt path(s)
batch_size=128, # batch size
imgsz=224, # inference size (pixels)
device="", # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
verbose=False, # verbose output
project=ROOT / "runs/val-cls", # save to project/name
name="exp", # save to project/name
exist_ok=False, # existing project/name ok, do not increment
half=False, # use FP16 half-precision inference
dnn=False, # use OpenCV DNN for ONNX inference
model=None,
dataloader=None,
criterion=None,
pbar=None,
):
# Initialize/load model and set device
training = model is not None
if training: # called by train.py
device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
half &= device.type != "cpu" # half precision only supported on CUDA
model.half() if half else model.float()
else: # called directly
device = select_device(device, batch_size=batch_size)
# Directories
save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
save_dir.mkdir(parents=True, exist_ok=True) # make dir
# Load model
model = DetectMultiBackend(weights, device=device, dnn=dnn, fp16=half)
stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
imgsz = check_img_size(imgsz, s=stride) # check image size
half = model.fp16 # FP16 supported on limited backends with CUDA
if engine:
batch_size = model.batch_size
else:
device = model.device
if not (pt or jit):
batch_size = 1 # export.py models default to batch-size 1
LOGGER.info(f"Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models")
# Dataloader
data = Path(data)
test_dir = data / "test" if (data / "test").exists() else data / "val" # data/test or data/val
dataloader = create_classification_dataloader(
path=test_dir, imgsz=imgsz, batch_size=batch_size, augment=False, rank=-1, workers=workers
)
model.eval()
pred, targets, loss, dt = [], [], 0, (Profile(device=device), Profile(device=device), Profile(device=device))
n = len(dataloader) # number of batches
action = "validating" if dataloader.dataset.root.stem == "val" else "testing"
desc = f"{pbar.desc[:-36]}{action:>36}" if pbar else f"{action}"
bar = tqdm(dataloader, desc, n, not training, bar_format=TQDM_BAR_FORMAT, position=0)
with torch.cuda.amp.autocast(enabled=device.type != "cpu"):
for images, labels in bar:
with dt[0]:
images, labels = images.to(device, non_blocking=True), labels.to(device)
with dt[1]:
y = model(images)
with dt[2]:
pred.append(y.argsort(1, descending=True)[:, :5])
targets.append(labels)
if criterion:
loss += criterion(y, labels)
loss /= n
pred, targets = torch.cat(pred), torch.cat(targets)
correct = (targets[:, None] == pred).float()
acc = torch.stack((correct[:, 0], correct.max(1).values), dim=1) # (top1, top5) accuracy
top1, top5 = acc.mean(0).tolist()
if pbar:
pbar.desc = f"{pbar.desc[:-36]}{loss:>12.3g}{top1:>12.3g}{top5:>12.3g}"
if verbose: # all classes
LOGGER.info(f"{'Class':>24}{'Images':>12}{'top1_acc':>12}{'top5_acc':>12}")
LOGGER.info(f"{'all':>24}{targets.shape[0]:>12}{top1:>12.3g}{top5:>12.3g}")
for i, c in model.names.items():
acc_i = acc[targets == i]
top1i, top5i = acc_i.mean(0).tolist()
LOGGER.info(f"{c:>24}{acc_i.shape[0]:>12}{top1i:>12.3g}{top5i:>12.3g}")
# Print results
t = tuple(x.t / len(dataloader.dataset.samples) * 1e3 for x in dt) # speeds per image
shape = (1, 3, imgsz, imgsz)
LOGGER.info(f"Speed: %.1fms pre-process, %.1fms inference, %.1fms post-process per image at shape {shape}" % t)
LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}")
return top1, top5, loss
def parse_opt():
"""Parses and returns command line arguments for YOLOv5 model evaluation and inference settings."""
parser = argparse.ArgumentParser()
parser.add_argument("--data", type=str, default=ROOT / "../datasets/mnist", help="dataset path")
parser.add_argument("--weights", nargs="+", type=str, default=ROOT / "yolov5s-cls.pt", help="model.pt path(s)")
parser.add_argument("--batch-size", type=int, default=128, help="batch size")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=224, help="inference size (pixels)")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--workers", type=int, default=8, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--verbose", nargs="?", const=True, default=True, help="verbose output")
parser.add_argument("--project", default=ROOT / "runs/val-cls", help="save to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--half", action="store_true", help="use FP16 half-precision inference")
parser.add_argument("--dnn", action="store_true", help="use OpenCV DNN for ONNX inference")
opt = parser.parse_args()
print_args(vars(opt))
return opt
def main(opt):
"""Executes the YOLOv5 model prediction workflow, handling argument parsing and requirement checks."""
check_requirements(ROOT / "requirements.txt", exclude=("tensorboard", "thop"))
run(**vars(opt))
if __name__ == "__main__":
opt = parse_opt()
main(opt)
================================================
FILE: client.py
================================================
import pickle
import socket
import sys
import threading
import time
import traceback
import mss
from PyQt5.QtWidgets import QApplication
import apex_yolov5.socket.socket_util as socket_util
from apex_recoils.core.GameWindowsStatus import GameWindowsStatus
from apex_recoils.core.screentaker.LocalScreenTaker import LocalScreenTaker
from apex_recoils.net.socket.Server import Server
from apex_yolov5 import global_img_info
from apex_yolov5.grabscreen import grab_screen_int_array2
from apex_yolov5.job_listener import JoyListener
from apex_yolov5.job_listener.JoyToKey import JoyToKey
from apex_yolov5.log import LogFactory
from apex_yolov5.mouse_mover.Win32ApiMover import Win32ApiMover
from apex_yolov5.socket.config import global_config
def main():
while True:
try:
# ...or, in a non-blocking fashion:
# 创建一个TCP/IP套接字
client_socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
# 服务器地址和端口
server_address = (global_config.listener_ip, global_config.listener_port)
# 连接服务器
client_socket.connect(server_address)
buffer_size = global_config.buffer_size
sct = mss.mss()
print("连接成功")
try:
while True:
if not global_config.ai_toggle:
time.sleep(0.1)
continue
screenshot = grab_screen_int_array2(sct=sct, monitor=global_config.monitor)
global_img_info.set_current_img_2(screenshot, screenshot, screenshot.width, screenshot.height)
data = {"img_origin": screenshot.rgb, "shot_width": screenshot.width,
"shot_height": screenshot.height}
data = pickle.dumps(data)
socket_util.send(client_socket, data, buffer_size=buffer_size)
averager_data = socket_util.recv(client_socket, buffer_size=buffer_size)
if averager_data is None:
continue
averager = pickle.loads(averager_data)
global_config.sign_shot_xy(averager)
global_config.change_shot_xy()
except Exception as e:
print(e)
traceback.print_exc()
pass
finally:
# 关闭连接
client_socket.close()
except:
pass
finally:
time.sleep(1)
print("连接断开,等待重连...")
pass
if __name__ == "__main__":
app = QApplication(sys.argv)
LogFactory.init_logger()
server = Server(server_address=(global_config.distributed_param["ip"], global_config.distributed_param["port"]),
screen_taker=LocalScreenTaker())
threading.Thread(target=server.wait_client).start()
game_windows_status = GameWindowsStatus()
jtk = JoyToKey(joy_to_key_map=global_config.joy_to_key_map,
c1_mouse_mover=Win32ApiMover({}), game_windows_status=game_windows_status)
JoyListener.joy_listener = JoyListener.JoyListener()
JoyListener.joy_listener.connect_axis(jtk.axis_to_key)
JoyListener.joy_listener.start(None)
threading.Thread(target=main).start()
sys.exit(app.exec_())
================================================
FILE: client.spec
================================================
# -*- mode: python ; coding: utf-8 -*-
block_cipher = None
pathex = [
'C:/Users/Administrator/PycharmProjects/yolov5'
]
hiddenimports = ['models.yolo',
'utils',
'utils.general',
'models',
'utils.aws',
'utils.docker',
'utils.flask_rest_api',
'utils.google_app_engine',
'utils.loggers',
'utils.segment',
'utils.loggers.clearml',
'utils.loggers.comet',
'utils.loggers.wandb',
'utils.segment',
'models.hub',
'segment',
'apex_yolov5',
'apex_yolov5.socket'
]
a = Analysis(
['client.py'],
pathex=pathex,
binaries=[(r'./utils/general.pyc',r'./utils')],
datas=[(r'./config/global_config.json',r'./config')],
hiddenimports=['models.yolo'],
hookspath=[],
hooksconfig={},
runtime_hooks=[],
excludes=[],
win_no_prefer_redirects=False,
win_private_assemblies=False,
cipher=block_cipher,
noarchive=False,
)
pyz = PYZ(a.pure, a.zipped_data, cipher=block_cipher)
exe = EXE(
pyz,
a.scripts,
[],
exclude_binaries=True,
name='client',
debug=False,
bootloader_ignore_signals=False,
strip=False,
upx=True,
console=False,
disable_windowed_traceback=False,
argv_emulation=False,
target_arch=None,
codesign_identity=None,
entitlements_file=None,
)
coll = COLLECT(
exe,
a.binaries,
a.zipfiles,
a.datas,
strip=False,
upx=True,
upx_exclude=[],
name='client',
)
================================================
FILE: config/ref.txt
================================================
global_config
================================================
FILE: data/Argoverse.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Argoverse-HD dataset (ring-front-center camera) http://www.cs.cmu.edu/~mengtial/proj/streaming/ by Argo AI
# Example usage: python train.py --data Argoverse.yaml
# parent
# ├── yolov5
# └── datasets
# └── Argoverse ← downloads here (31.3 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/Argoverse # dataset root dir
train: Argoverse-1.1/images/train/ # train images (relative to 'path') 39384 images
val: Argoverse-1.1/images/val/ # val images (relative to 'path') 15062 images
test: Argoverse-1.1/images/test/ # test images (optional) https://eval.ai/web/challenges/challenge-page/800/overview
# Classes
names:
0: person
1: bicycle
2: car
3: motorcycle
4: bus
5: truck
6: traffic_light
7: stop_sign
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
import json
from tqdm import tqdm
from utils.general import download, Path
def argoverse2yolo(set):
labels = {}
a = json.load(open(set, "rb"))
for annot in tqdm(a['annotations'], desc=f"Converting {set} to YOLOv5 format..."):
img_id = annot['image_id']
img_name = a['images'][img_id]['name']
img_label_name = f'{img_name[:-3]}txt'
cls = annot['category_id'] # instance class id
x_center, y_center, width, height = annot['bbox']
x_center = (x_center + width / 2) / 1920.0 # offset and scale
y_center = (y_center + height / 2) / 1200.0 # offset and scale
width /= 1920.0 # scale
height /= 1200.0 # scale
img_dir = set.parents[2] / 'Argoverse-1.1' / 'labels' / a['seq_dirs'][a['images'][annot['image_id']]['sid']]
if not img_dir.exists():
img_dir.mkdir(parents=True, exist_ok=True)
k = str(img_dir / img_label_name)
if k not in labels:
labels[k] = []
labels[k].append(f"{cls} {x_center} {y_center} {width} {height}\n")
for k in labels:
with open(k, "w") as f:
f.writelines(labels[k])
# Download
dir = Path(yaml['path']) # dataset root dir
urls = ['https://argoverse-hd.s3.us-east-2.amazonaws.com/Argoverse-HD-Full.zip']
download(urls, dir=dir, delete=False)
# Convert
annotations_dir = 'Argoverse-HD/annotations/'
(dir / 'Argoverse-1.1' / 'tracking').rename(dir / 'Argoverse-1.1' / 'images') # rename 'tracking' to 'images'
for d in "train.json", "val.json":
argoverse2yolo(dir / annotations_dir / d) # convert VisDrone annotations to YOLO labels
================================================
FILE: data/GlobalWheat2020.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Global Wheat 2020 dataset http://www.global-wheat.com/ by University of Saskatchewan
# Example usage: python train.py --data GlobalWheat2020.yaml
# parent
# ├── yolov5
# └── datasets
# └── GlobalWheat2020 ← downloads here (7.0 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/GlobalWheat2020 # dataset root dir
train: # train images (relative to 'path') 3422 images
- images/arvalis_1
- images/arvalis_2
- images/arvalis_3
- images/ethz_1
- images/rres_1
- images/inrae_1
- images/usask_1
val: # val images (relative to 'path') 748 images (WARNING: train set contains ethz_1)
- images/ethz_1
test: # test images (optional) 1276 images
- images/utokyo_1
- images/utokyo_2
- images/nau_1
- images/uq_1
# Classes
names:
0: wheat_head
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
from utils.general import download, Path
# Download
dir = Path(yaml['path']) # dataset root dir
urls = ['https://zenodo.org/record/4298502/files/global-wheat-codalab-official.zip',
'https://github.com/ultralytics/yolov5/releases/download/v1.0/GlobalWheat2020_labels.zip']
download(urls, dir=dir)
# Make Directories
for p in 'annotations', 'images', 'labels':
(dir / p).mkdir(parents=True, exist_ok=True)
# Move
for p in 'arvalis_1', 'arvalis_2', 'arvalis_3', 'ethz_1', 'rres_1', 'inrae_1', 'usask_1', \
'utokyo_1', 'utokyo_2', 'nau_1', 'uq_1':
(dir / p).rename(dir / 'images' / p) # move to /images
f = (dir / p).with_suffix('.json') # json file
if f.exists():
f.rename((dir / 'annotations' / p).with_suffix('.json')) # move to /annotations
================================================
FILE: data/ImageNet.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
# Example usage: python classify/train.py --data imagenet
# parent
# ├── yolov5
# └── datasets
# └── imagenet ← downloads here (144 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/imagenet # dataset root dir
train: train # train images (relative to 'path') 1281167 images
val: val # val images (relative to 'path') 50000 images
test: # test images (optional)
# Classes
names:
0: tench
1: goldfish
2: great white shark
3: tiger shark
4: hammerhead shark
5: electric ray
6: stingray
7: cock
8: hen
9: ostrich
10: brambling
11: goldfinch
12: house finch
13: junco
14: indigo bunting
15: American robin
16: bulbul
17: jay
18: magpie
19: chickadee
20: American dipper
21: kite
22: bald eagle
23: vulture
24: great grey owl
25: fire salamander
26: smooth newt
27: newt
28: spotted salamander
29: axolotl
30: American bullfrog
31: tree frog
32: tailed frog
33: loggerhead sea turtle
34: leatherback sea turtle
35: mud turtle
36: terrapin
37: box turtle
38: banded gecko
39: green iguana
40: Carolina anole
41: desert grassland whiptail lizard
42: agama
43: frilled-necked lizard
44: alligator lizard
45: Gila monster
46: European green lizard
47: chameleon
48: Komodo dragon
49: Nile crocodile
50: American alligator
51: triceratops
52: worm snake
53: ring-necked snake
54: eastern hog-nosed snake
55: smooth green snake
56: kingsnake
57: garter snake
58: water snake
59: vine snake
60: night snake
61: boa constrictor
62: African rock python
63: Indian cobra
64: green mamba
65: sea snake
66: Saharan horned viper
67: eastern diamondback rattlesnake
68: sidewinder
69: trilobite
70: harvestman
71: scorpion
72: yellow garden spider
73: barn spider
74: European garden spider
75: southern black widow
76: tarantula
77: wolf spider
78: tick
79: centipede
80: black grouse
81: ptarmigan
82: ruffed grouse
83: prairie grouse
84: peacock
85: quail
86: partridge
87: grey parrot
88: macaw
89: sulphur-crested cockatoo
90: lorikeet
91: coucal
92: bee eater
93: hornbill
94: hummingbird
95: jacamar
96: toucan
97: duck
98: red-breasted merganser
99: goose
100: black swan
101: tusker
102: echidna
103: platypus
104: wallaby
105: koala
106: wombat
107: jellyfish
108: sea anemone
109: brain coral
110: flatworm
111: nematode
112: conch
113: snail
114: slug
115: sea slug
116: chiton
117: chambered nautilus
118: Dungeness crab
119: rock crab
120: fiddler crab
121: red king crab
122: American lobster
123: spiny lobster
124: crayfish
125: hermit crab
126: isopod
127: white stork
128: black stork
129: spoonbill
130: flamingo
131: little blue heron
132: great egret
133: bittern
134: crane (bird)
135: limpkin
136: common gallinule
137: American coot
138: bustard
139: ruddy turnstone
140: dunlin
141: common redshank
142: dowitcher
143: oystercatcher
144: pelican
145: king penguin
146: albatross
147: grey whale
148: killer whale
149: dugong
150: sea lion
151: Chihuahua
152: Japanese Chin
153: Maltese
154: Pekingese
155: Shih Tzu
156: King Charles Spaniel
157: Papillon
158: toy terrier
159: Rhodesian Ridgeback
160: Afghan Hound
161: Basset Hound
162: Beagle
163: Bloodhound
164: Bluetick Coonhound
165: Black and Tan Coonhound
166: Treeing Walker Coonhound
167: English foxhound
168: Redbone Coonhound
169: borzoi
170: Irish Wolfhound
171: Italian Greyhound
172: Whippet
173: Ibizan Hound
174: Norwegian Elkhound
175: Otterhound
176: Saluki
177: Scottish Deerhound
178: Weimaraner
179: Staffordshire Bull Terrier
180: American Staffordshire Terrier
181: Bedlington Terrier
182: Border Terrier
183: Kerry Blue Terrier
184: Irish Terrier
185: Norfolk Terrier
186: Norwich Terrier
187: Yorkshire Terrier
188: Wire Fox Terrier
189: Lakeland Terrier
190: Sealyham Terrier
191: Airedale Terrier
192: Cairn Terrier
193: Australian Terrier
194: Dandie Dinmont Terrier
195: Boston Terrier
196: Miniature Schnauzer
197: Giant Schnauzer
198: Standard Schnauzer
199: Scottish Terrier
200: Tibetan Terrier
201: Australian Silky Terrier
202: Soft-coated Wheaten Terrier
203: West Highland White Terrier
204: Lhasa Apso
205: Flat-Coated Retriever
206: Curly-coated Retriever
207: Golden Retriever
208: Labrador Retriever
209: Chesapeake Bay Retriever
210: German Shorthaired Pointer
211: Vizsla
212: English Setter
213: Irish Setter
214: Gordon Setter
215: Brittany
216: Clumber Spaniel
217: English Springer Spaniel
218: Welsh Springer Spaniel
219: Cocker Spaniels
220: Sussex Spaniel
221: Irish Water Spaniel
222: Kuvasz
223: Schipperke
224: Groenendael
225: Malinois
226: Briard
227: Australian Kelpie
228: Komondor
229: Old English Sheepdog
230: Shetland Sheepdog
231: collie
232: Border Collie
233: Bouvier des Flandres
234: Rottweiler
235: German Shepherd Dog
236: Dobermann
237: Miniature Pinscher
238: Greater Swiss Mountain Dog
239: Bernese Mountain Dog
240: Appenzeller Sennenhund
241: Entlebucher Sennenhund
242: Boxer
243: Bullmastiff
244: Tibetan Mastiff
245: French Bulldog
246: Great Dane
247: St. Bernard
248: husky
249: Alaskan Malamute
250: Siberian Husky
251: Dalmatian
252: Affenpinscher
253: Basenji
254: pug
255: Leonberger
256: Newfoundland
257: Pyrenean Mountain Dog
258: Samoyed
259: Pomeranian
260: Chow Chow
261: Keeshond
262: Griffon Bruxellois
263: Pembroke Welsh Corgi
264: Cardigan Welsh Corgi
265: Toy Poodle
266: Miniature Poodle
267: Standard Poodle
268: Mexican hairless dog
269: grey wolf
270: Alaskan tundra wolf
271: red wolf
272: coyote
273: dingo
274: dhole
275: African wild dog
276: hyena
277: red fox
278: kit fox
279: Arctic fox
280: grey fox
281: tabby cat
282: tiger cat
283: Persian cat
284: Siamese cat
285: Egyptian Mau
286: cougar
287: lynx
288: leopard
289: snow leopard
290: jaguar
291: lion
292: tiger
293: cheetah
294: brown bear
295: American black bear
296: polar bear
297: sloth bear
298: mongoose
299: meerkat
300: tiger beetle
301: ladybug
302: ground beetle
303: longhorn beetle
304: leaf beetle
305: dung beetle
306: rhinoceros beetle
307: weevil
308: fly
309: bee
310: ant
311: grasshopper
312: cricket
313: stick insect
314: cockroach
315: mantis
316: cicada
317: leafhopper
318: lacewing
319: dragonfly
320: damselfly
321: red admiral
322: ringlet
323: monarch butterfly
324: small white
325: sulphur butterfly
326: gossamer-winged butterfly
327: starfish
328: sea urchin
329: sea cucumber
330: cottontail rabbit
331: hare
332: Angora rabbit
333: hamster
334: porcupine
335: fox squirrel
336: marmot
337: beaver
338: guinea pig
339: common sorrel
340: zebra
341: pig
342: wild boar
343: warthog
344: hippopotamus
345: ox
346: water buffalo
347: bison
348: ram
349: bighorn sheep
350: Alpine ibex
351: hartebeest
352: impala
353: gazelle
354: dromedary
355: llama
356: weasel
357: mink
358: European polecat
359: black-footed ferret
360: otter
361: skunk
362: badger
363: armadillo
364: three-toed sloth
365: orangutan
366: gorilla
367: chimpanzee
368: gibbon
369: siamang
370: guenon
371: patas monkey
372: baboon
373: macaque
374: langur
375: black-and-white colobus
376: proboscis monkey
377: marmoset
378: white-headed capuchin
379: howler monkey
380: titi
381: Geoffroy's spider monkey
382: common squirrel monkey
383: ring-tailed lemur
384: indri
385: Asian elephant
386: African bush elephant
387: red panda
388: giant panda
389: snoek
390: eel
391: coho salmon
392: rock beauty
393: clownfish
394: sturgeon
395: garfish
396: lionfish
397: pufferfish
398: abacus
399: abaya
400: academic gown
401: accordion
402: acoustic guitar
403: aircraft carrier
404: airliner
405: airship
406: altar
407: ambulance
408: amphibious vehicle
409: analog clock
410: apiary
411: apron
412: waste container
413: assault rifle
414: backpack
415: bakery
416: balance beam
417: balloon
418: ballpoint pen
419: Band-Aid
420: banjo
421: baluster
422: barbell
423: barber chair
424: barbershop
425: barn
426: barometer
427: barrel
428: wheelbarrow
429: baseball
430: basketball
431: bassinet
432: bassoon
433: swimming cap
434: bath towel
435: bathtub
436: station wagon
437: lighthouse
438: beaker
439: military cap
440: beer bottle
441: beer glass
442: bell-cot
443: bib
444: tandem bicycle
445: bikini
446: ring binder
447: binoculars
448: birdhouse
449: boathouse
450: bobsleigh
451: bolo tie
452: poke bonnet
453: bookcase
454: bookstore
455: bottle cap
456: bow
457: bow tie
458: brass
459: bra
460: breakwater
461: breastplate
462: broom
463: bucket
464: buckle
465: bulletproof vest
466: high-speed train
467: butcher shop
468: taxicab
469: cauldron
470: candle
471: cannon
472: canoe
473: can opener
474: cardigan
475: car mirror
476: carousel
477: tool kit
478: carton
479: car wheel
480: automated teller machine
481: cassette
482: cassette player
483: castle
484: catamaran
485: CD player
486: cello
487: mobile phone
488: chain
489: chain-link fence
490: chain mail
491: chainsaw
492: chest
493: chiffonier
494: chime
495: china cabinet
496: Christmas stocking
497: church
498: movie theater
499: cleaver
500: cliff dwelling
501: cloak
502: clogs
503: cocktail shaker
504: coffee mug
505: coffeemaker
506: coil
507: combination lock
508: computer keyboard
509: confectionery store
510: container ship
511: convertible
512: corkscrew
513: cornet
514: cowboy boot
515: cowboy hat
516: cradle
517: crane (machine)
518: crash helmet
519: crate
520: infant bed
521: Crock Pot
522: croquet ball
523: crutch
524: cuirass
525: dam
526: desk
527: desktop computer
528: rotary dial telephone
529: diaper
530: digital clock
531: digital watch
532: dining table
533: dishcloth
534: dishwasher
535: disc brake
536: dock
537: dog sled
538: dome
539: doormat
540: drilling rig
541: drum
542: drumstick
543: dumbbell
544: Dutch oven
545: electric fan
546: electric guitar
547: electric locomotive
548: entertainment center
549: envelope
550: espresso machine
551: face powder
552: feather boa
553: filing cabinet
554: fireboat
555: fire engine
556: fire screen sheet
557: flagpole
558: flute
559: folding chair
560: football helmet
561: forklift
562: fountain
563: fountain pen
564: four-poster bed
565: freight car
566: French horn
567: frying pan
568: fur coat
569: garbage truck
570: gas mask
571: gas pump
572: goblet
573: go-kart
574: golf ball
575: golf cart
576: gondola
577: gong
578: gown
579: grand piano
580: greenhouse
581: grille
582: grocery store
583: guillotine
584: barrette
585: hair spray
586: half-track
587: hammer
588: hamper
589: hair dryer
590: hand-held computer
591: handkerchief
592: hard disk drive
593: harmonica
594: harp
595: harvester
596: hatchet
597: holster
598: home theater
599: honeycomb
600: hook
601: hoop skirt
602: horizontal bar
603: horse-drawn vehicle
604: hourglass
605: iPod
606: clothes iron
607: jack-o'-lantern
608: jeans
609: jeep
610: T-shirt
611: jigsaw puzzle
612: pulled rickshaw
613: joystick
614: kimono
615: knee pad
616: knot
617: lab coat
618: ladle
619: lampshade
620: laptop computer
621: lawn mower
622: lens cap
623: paper knife
624: library
625: lifeboat
626: lighter
627: limousine
628: ocean liner
629: lipstick
630: slip-on shoe
631: lotion
632: speaker
633: loupe
634: sawmill
635: magnetic compass
636: mail bag
637: mailbox
638: tights
639: tank suit
640: manhole cover
641: maraca
642: marimba
643: mask
644: match
645: maypole
646: maze
647: measuring cup
648: medicine chest
649: megalith
650: microphone
651: microwave oven
652: military uniform
653: milk can
654: minibus
655: miniskirt
656: minivan
657: missile
658: mitten
659: mixing bowl
660: mobile home
661: Model T
662: modem
663: monastery
664: monitor
665: moped
666: mortar
667: square academic cap
668: mosque
669: mosquito net
670: scooter
671: mountain bike
672: tent
673: computer mouse
674: mousetrap
675: moving van
676: muzzle
677: nail
678: neck brace
679: necklace
680: nipple
681: notebook computer
682: obelisk
683: oboe
684: ocarina
685: odometer
686: oil filter
687: organ
688: oscilloscope
689: overskirt
690: bullock cart
691: oxygen mask
692: packet
693: paddle
694: paddle wheel
695: padlock
696: paintbrush
697: pajamas
698: palace
699: pan flute
700: paper towel
701: parachute
702: parallel bars
703: park bench
704: parking meter
705: passenger car
706: patio
707: payphone
708: pedestal
709: pencil case
710: pencil sharpener
711: perfume
712: Petri dish
713: photocopier
714: plectrum
715: Pickelhaube
716: picket fence
717: pickup truck
718: pier
719: piggy bank
720: pill bottle
721: pillow
722: ping-pong ball
723: pinwheel
724: pirate ship
725: pitcher
726: hand plane
727: planetarium
728: plastic bag
729: plate rack
730: plow
731: plunger
732: Polaroid camera
733: pole
734: police van
735: poncho
736: billiard table
737: soda bottle
738: pot
739: potter's wheel
740: power drill
741: prayer rug
742: printer
743: prison
744: projectile
745: projector
746: hockey puck
747: punching bag
748: purse
749: quill
750: quilt
751: race car
752: racket
753: radiator
754: radio
755: radio telescope
756: rain barrel
757: recreational vehicle
758: reel
759: reflex camera
760: refrigerator
761: remote control
762: restaurant
763: revolver
764: rifle
765: rocking chair
766: rotisserie
767: eraser
768: rugby ball
769: ruler
770: running shoe
771: safe
772: safety pin
773: salt shaker
774: sandal
775: sarong
776: saxophone
777: scabbard
778: weighing scale
779: school bus
780: schooner
781: scoreboard
782: CRT screen
783: screw
784: screwdriver
785: seat belt
786: sewing machine
787: shield
788: shoe store
789: shoji
790: shopping basket
791: shopping cart
792: shovel
793: shower cap
794: shower curtain
795: ski
796: ski mask
797: sleeping bag
798: slide rule
799: sliding door
800: slot machine
801: snorkel
802: snowmobile
803: snowplow
804: soap dispenser
805: soccer ball
806: sock
807: solar thermal collector
808: sombrero
809: soup bowl
810: space bar
811: space heater
812: space shuttle
813: spatula
814: motorboat
815: spider web
816: spindle
817: sports car
818: spotlight
819: stage
820: steam locomotive
821: through arch bridge
822: steel drum
823: stethoscope
824: scarf
825: stone wall
826: stopwatch
827: stove
828: strainer
829: tram
830: stretcher
831: couch
832: stupa
833: submarine
834: suit
835: sundial
836: sunglass
837: sunglasses
838: sunscreen
839: suspension bridge
840: mop
841: sweatshirt
842: swimsuit
843: swing
844: switch
845: syringe
846: table lamp
847: tank
848: tape player
849: teapot
850: teddy bear
851: television
852: tennis ball
853: thatched roof
854: front curtain
855: thimble
856: threshing machine
857: throne
858: tile roof
859: toaster
860: tobacco shop
861: toilet seat
862: torch
863: totem pole
864: tow truck
865: toy store
866: tractor
867: semi-trailer truck
868: tray
869: trench coat
870: tricycle
871: trimaran
872: tripod
873: triumphal arch
874: trolleybus
875: trombone
876: tub
877: turnstile
878: typewriter keyboard
879: umbrella
880: unicycle
881: upright piano
882: vacuum cleaner
883: vase
884: vault
885: velvet
886: vending machine
887: vestment
888: viaduct
889: violin
890: volleyball
891: waffle iron
892: wall clock
893: wallet
894: wardrobe
895: military aircraft
896: sink
897: washing machine
898: water bottle
899: water jug
900: water tower
901: whiskey jug
902: whistle
903: wig
904: window screen
905: window shade
906: Windsor tie
907: wine bottle
908: wing
909: wok
910: wooden spoon
911: wool
912: split-rail fence
913: shipwreck
914: yawl
915: yurt
916: website
917: comic book
918: crossword
919: traffic sign
920: traffic light
921: dust jacket
922: menu
923: plate
924: guacamole
925: consomme
926: hot pot
927: trifle
928: ice cream
929: ice pop
930: baguette
931: bagel
932: pretzel
933: cheeseburger
934: hot dog
935: mashed potato
936: cabbage
937: broccoli
938: cauliflower
939: zucchini
940: spaghetti squash
941: acorn squash
942: butternut squash
943: cucumber
944: artichoke
945: bell pepper
946: cardoon
947: mushroom
948: Granny Smith
949: strawberry
950: orange
951: lemon
952: fig
953: pineapple
954: banana
955: jackfruit
956: custard apple
957: pomegranate
958: hay
959: carbonara
960: chocolate syrup
961: dough
962: meatloaf
963: pizza
964: pot pie
965: burrito
966: red wine
967: espresso
968: cup
969: eggnog
970: alp
971: bubble
972: cliff
973: coral reef
974: geyser
975: lakeshore
976: promontory
977: shoal
978: seashore
979: valley
980: volcano
981: baseball player
982: bridegroom
983: scuba diver
984: rapeseed
985: daisy
986: yellow lady's slipper
987: corn
988: acorn
989: rose hip
990: horse chestnut seed
991: coral fungus
992: agaric
993: gyromitra
994: stinkhorn mushroom
995: earth star
996: hen-of-the-woods
997: bolete
998: ear
999: toilet paper
# Download script/URL (optional)
download: data/scripts/get_imagenet.sh
================================================
FILE: data/ImageNet10.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
# Example usage: python classify/train.py --data imagenet
# parent
# ├── yolov5
# └── datasets
# └── imagenet10 ← downloads here
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/imagenet10 # dataset root dir
train: train # train images (relative to 'path') 1281167 images
val: val # val images (relative to 'path') 50000 images
test: # test images (optional)
# Classes
names:
0: tench
1: goldfish
2: great white shark
3: tiger shark
4: hammerhead shark
5: electric ray
6: stingray
7: cock
8: hen
9: ostrich
# Download script/URL (optional)
download: data/scripts/get_imagenet10.sh
================================================
FILE: data/ImageNet100.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
# Example usage: python classify/train.py --data imagenet
# parent
# ├── yolov5
# └── datasets
# └── imagenet100 ← downloads here
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/imagenet100 # dataset root dir
train: train # train images (relative to 'path') 1281167 images
val: val # val images (relative to 'path') 50000 images
test: # test images (optional)
# Classes
names:
0: tench
1: goldfish
2: great white shark
3: tiger shark
4: hammerhead shark
5: electric ray
6: stingray
7: cock
8: hen
9: ostrich
10: brambling
11: goldfinch
12: house finch
13: junco
14: indigo bunting
15: American robin
16: bulbul
17: jay
18: magpie
19: chickadee
20: American dipper
21: kite
22: bald eagle
23: vulture
24: great grey owl
25: fire salamander
26: smooth newt
27: newt
28: spotted salamander
29: axolotl
30: American bullfrog
31: tree frog
32: tailed frog
33: loggerhead sea turtle
34: leatherback sea turtle
35: mud turtle
36: terrapin
37: box turtle
38: banded gecko
39: green iguana
40: Carolina anole
41: desert grassland whiptail lizard
42: agama
43: frilled-necked lizard
44: alligator lizard
45: Gila monster
46: European green lizard
47: chameleon
48: Komodo dragon
49: Nile crocodile
50: American alligator
51: triceratops
52: worm snake
53: ring-necked snake
54: eastern hog-nosed snake
55: smooth green snake
56: kingsnake
57: garter snake
58: water snake
59: vine snake
60: night snake
61: boa constrictor
62: African rock python
63: Indian cobra
64: green mamba
65: sea snake
66: Saharan horned viper
67: eastern diamondback rattlesnake
68: sidewinder
69: trilobite
70: harvestman
71: scorpion
72: yellow garden spider
73: barn spider
74: European garden spider
75: southern black widow
76: tarantula
77: wolf spider
78: tick
79: centipede
80: black grouse
81: ptarmigan
82: ruffed grouse
83: prairie grouse
84: peacock
85: quail
86: partridge
87: grey parrot
88: macaw
89: sulphur-crested cockatoo
90: lorikeet
91: coucal
92: bee eater
93: hornbill
94: hummingbird
95: jacamar
96: toucan
97: duck
98: red-breasted merganser
99: goose
# Download script/URL (optional)
download: data/scripts/get_imagenet100.sh
================================================
FILE: data/ImageNet1000.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# ImageNet-1k dataset https://www.image-net.org/index.php by Stanford University
# Simplified class names from https://github.com/anishathalye/imagenet-simple-labels
# Example usage: python classify/train.py --data imagenet
# parent
# ├── yolov5
# └── datasets
# └── imagenet100 ← downloads here
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/imagenet1000 # dataset root dir
train: train # train images (relative to 'path') 1281167 images
val: val # val images (relative to 'path') 50000 images
test: # test images (optional)
# Classes
names:
0: tench
1: goldfish
2: great white shark
3: tiger shark
4: hammerhead shark
5: electric ray
6: stingray
7: cock
8: hen
9: ostrich
10: brambling
11: goldfinch
12: house finch
13: junco
14: indigo bunting
15: American robin
16: bulbul
17: jay
18: magpie
19: chickadee
20: American dipper
21: kite
22: bald eagle
23: vulture
24: great grey owl
25: fire salamander
26: smooth newt
27: newt
28: spotted salamander
29: axolotl
30: American bullfrog
31: tree frog
32: tailed frog
33: loggerhead sea turtle
34: leatherback sea turtle
35: mud turtle
36: terrapin
37: box turtle
38: banded gecko
39: green iguana
40: Carolina anole
41: desert grassland whiptail lizard
42: agama
43: frilled-necked lizard
44: alligator lizard
45: Gila monster
46: European green lizard
47: chameleon
48: Komodo dragon
49: Nile crocodile
50: American alligator
51: triceratops
52: worm snake
53: ring-necked snake
54: eastern hog-nosed snake
55: smooth green snake
56: kingsnake
57: garter snake
58: water snake
59: vine snake
60: night snake
61: boa constrictor
62: African rock python
63: Indian cobra
64: green mamba
65: sea snake
66: Saharan horned viper
67: eastern diamondback rattlesnake
68: sidewinder
69: trilobite
70: harvestman
71: scorpion
72: yellow garden spider
73: barn spider
74: European garden spider
75: southern black widow
76: tarantula
77: wolf spider
78: tick
79: centipede
80: black grouse
81: ptarmigan
82: ruffed grouse
83: prairie grouse
84: peacock
85: quail
86: partridge
87: grey parrot
88: macaw
89: sulphur-crested cockatoo
90: lorikeet
91: coucal
92: bee eater
93: hornbill
94: hummingbird
95: jacamar
96: toucan
97: duck
98: red-breasted merganser
99: goose
100: black swan
101: tusker
102: echidna
103: platypus
104: wallaby
105: koala
106: wombat
107: jellyfish
108: sea anemone
109: brain coral
110: flatworm
111: nematode
112: conch
113: snail
114: slug
115: sea slug
116: chiton
117: chambered nautilus
118: Dungeness crab
119: rock crab
120: fiddler crab
121: red king crab
122: American lobster
123: spiny lobster
124: crayfish
125: hermit crab
126: isopod
127: white stork
128: black stork
129: spoonbill
130: flamingo
131: little blue heron
132: great egret
133: bittern
134: crane (bird)
135: limpkin
136: common gallinule
137: American coot
138: bustard
139: ruddy turnstone
140: dunlin
141: common redshank
142: dowitcher
143: oystercatcher
144: pelican
145: king penguin
146: albatross
147: grey whale
148: killer whale
149: dugong
150: sea lion
151: Chihuahua
152: Japanese Chin
153: Maltese
154: Pekingese
155: Shih Tzu
156: King Charles Spaniel
157: Papillon
158: toy terrier
159: Rhodesian Ridgeback
160: Afghan Hound
161: Basset Hound
162: Beagle
163: Bloodhound
164: Bluetick Coonhound
165: Black and Tan Coonhound
166: Treeing Walker Coonhound
167: English foxhound
168: Redbone Coonhound
169: borzoi
170: Irish Wolfhound
171: Italian Greyhound
172: Whippet
173: Ibizan Hound
174: Norwegian Elkhound
175: Otterhound
176: Saluki
177: Scottish Deerhound
178: Weimaraner
179: Staffordshire Bull Terrier
180: American Staffordshire Terrier
181: Bedlington Terrier
182: Border Terrier
183: Kerry Blue Terrier
184: Irish Terrier
185: Norfolk Terrier
186: Norwich Terrier
187: Yorkshire Terrier
188: Wire Fox Terrier
189: Lakeland Terrier
190: Sealyham Terrier
191: Airedale Terrier
192: Cairn Terrier
193: Australian Terrier
194: Dandie Dinmont Terrier
195: Boston Terrier
196: Miniature Schnauzer
197: Giant Schnauzer
198: Standard Schnauzer
199: Scottish Terrier
200: Tibetan Terrier
201: Australian Silky Terrier
202: Soft-coated Wheaten Terrier
203: West Highland White Terrier
204: Lhasa Apso
205: Flat-Coated Retriever
206: Curly-coated Retriever
207: Golden Retriever
208: Labrador Retriever
209: Chesapeake Bay Retriever
210: German Shorthaired Pointer
211: Vizsla
212: English Setter
213: Irish Setter
214: Gordon Setter
215: Brittany
216: Clumber Spaniel
217: English Springer Spaniel
218: Welsh Springer Spaniel
219: Cocker Spaniels
220: Sussex Spaniel
221: Irish Water Spaniel
222: Kuvasz
223: Schipperke
224: Groenendael
225: Malinois
226: Briard
227: Australian Kelpie
228: Komondor
229: Old English Sheepdog
230: Shetland Sheepdog
231: collie
232: Border Collie
233: Bouvier des Flandres
234: Rottweiler
235: German Shepherd Dog
236: Dobermann
237: Miniature Pinscher
238: Greater Swiss Mountain Dog
239: Bernese Mountain Dog
240: Appenzeller Sennenhund
241: Entlebucher Sennenhund
242: Boxer
243: Bullmastiff
244: Tibetan Mastiff
245: French Bulldog
246: Great Dane
247: St. Bernard
248: husky
249: Alaskan Malamute
250: Siberian Husky
251: Dalmatian
252: Affenpinscher
253: Basenji
254: pug
255: Leonberger
256: Newfoundland
257: Pyrenean Mountain Dog
258: Samoyed
259: Pomeranian
260: Chow Chow
261: Keeshond
262: Griffon Bruxellois
263: Pembroke Welsh Corgi
264: Cardigan Welsh Corgi
265: Toy Poodle
266: Miniature Poodle
267: Standard Poodle
268: Mexican hairless dog
269: grey wolf
270: Alaskan tundra wolf
271: red wolf
272: coyote
273: dingo
274: dhole
275: African wild dog
276: hyena
277: red fox
278: kit fox
279: Arctic fox
280: grey fox
281: tabby cat
282: tiger cat
283: Persian cat
284: Siamese cat
285: Egyptian Mau
286: cougar
287: lynx
288: leopard
289: snow leopard
290: jaguar
291: lion
292: tiger
293: cheetah
294: brown bear
295: American black bear
296: polar bear
297: sloth bear
298: mongoose
299: meerkat
300: tiger beetle
301: ladybug
302: ground beetle
303: longhorn beetle
304: leaf beetle
305: dung beetle
306: rhinoceros beetle
307: weevil
308: fly
309: bee
310: ant
311: grasshopper
312: cricket
313: stick insect
314: cockroach
315: mantis
316: cicada
317: leafhopper
318: lacewing
319: dragonfly
320: damselfly
321: red admiral
322: ringlet
323: monarch butterfly
324: small white
325: sulphur butterfly
326: gossamer-winged butterfly
327: starfish
328: sea urchin
329: sea cucumber
330: cottontail rabbit
331: hare
332: Angora rabbit
333: hamster
334: porcupine
335: fox squirrel
336: marmot
337: beaver
338: guinea pig
339: common sorrel
340: zebra
341: pig
342: wild boar
343: warthog
344: hippopotamus
345: ox
346: water buffalo
347: bison
348: ram
349: bighorn sheep
350: Alpine ibex
351: hartebeest
352: impala
353: gazelle
354: dromedary
355: llama
356: weasel
357: mink
358: European polecat
359: black-footed ferret
360: otter
361: skunk
362: badger
363: armadillo
364: three-toed sloth
365: orangutan
366: gorilla
367: chimpanzee
368: gibbon
369: siamang
370: guenon
371: patas monkey
372: baboon
373: macaque
374: langur
375: black-and-white colobus
376: proboscis monkey
377: marmoset
378: white-headed capuchin
379: howler monkey
380: titi
381: Geoffroy's spider monkey
382: common squirrel monkey
383: ring-tailed lemur
384: indri
385: Asian elephant
386: African bush elephant
387: red panda
388: giant panda
389: snoek
390: eel
391: coho salmon
392: rock beauty
393: clownfish
394: sturgeon
395: garfish
396: lionfish
397: pufferfish
398: abacus
399: abaya
400: academic gown
401: accordion
402: acoustic guitar
403: aircraft carrier
404: airliner
405: airship
406: altar
407: ambulance
408: amphibious vehicle
409: analog clock
410: apiary
411: apron
412: waste container
413: assault rifle
414: backpack
415: bakery
416: balance beam
417: balloon
418: ballpoint pen
419: Band-Aid
420: banjo
421: baluster
422: barbell
423: barber chair
424: barbershop
425: barn
426: barometer
427: barrel
428: wheelbarrow
429: baseball
430: basketball
431: bassinet
432: bassoon
433: swimming cap
434: bath towel
435: bathtub
436: station wagon
437: lighthouse
438: beaker
439: military cap
440: beer bottle
441: beer glass
442: bell-cot
443: bib
444: tandem bicycle
445: bikini
446: ring binder
447: binoculars
448: birdhouse
449: boathouse
450: bobsleigh
451: bolo tie
452: poke bonnet
453: bookcase
454: bookstore
455: bottle cap
456: bow
457: bow tie
458: brass
459: bra
460: breakwater
461: breastplate
462: broom
463: bucket
464: buckle
465: bulletproof vest
466: high-speed train
467: butcher shop
468: taxicab
469: cauldron
470: candle
471: cannon
472: canoe
473: can opener
474: cardigan
475: car mirror
476: carousel
477: tool kit
478: carton
479: car wheel
480: automated teller machine
481: cassette
482: cassette player
483: castle
484: catamaran
485: CD player
486: cello
487: mobile phone
488: chain
489: chain-link fence
490: chain mail
491: chainsaw
492: chest
493: chiffonier
494: chime
495: china cabinet
496: Christmas stocking
497: church
498: movie theater
499: cleaver
500: cliff dwelling
501: cloak
502: clogs
503: cocktail shaker
504: coffee mug
505: coffeemaker
506: coil
507: combination lock
508: computer keyboard
509: confectionery store
510: container ship
511: convertible
512: corkscrew
513: cornet
514: cowboy boot
515: cowboy hat
516: cradle
517: crane (machine)
518: crash helmet
519: crate
520: infant bed
521: Crock Pot
522: croquet ball
523: crutch
524: cuirass
525: dam
526: desk
527: desktop computer
528: rotary dial telephone
529: diaper
530: digital clock
531: digital watch
532: dining table
533: dishcloth
534: dishwasher
535: disc brake
536: dock
537: dog sled
538: dome
539: doormat
540: drilling rig
541: drum
542: drumstick
543: dumbbell
544: Dutch oven
545: electric fan
546: electric guitar
547: electric locomotive
548: entertainment center
549: envelope
550: espresso machine
551: face powder
552: feather boa
553: filing cabinet
554: fireboat
555: fire engine
556: fire screen sheet
557: flagpole
558: flute
559: folding chair
560: football helmet
561: forklift
562: fountain
563: fountain pen
564: four-poster bed
565: freight car
566: French horn
567: frying pan
568: fur coat
569: garbage truck
570: gas mask
571: gas pump
572: goblet
573: go-kart
574: golf ball
575: golf cart
576: gondola
577: gong
578: gown
579: grand piano
580: greenhouse
581: grille
582: grocery store
583: guillotine
584: barrette
585: hair spray
586: half-track
587: hammer
588: hamper
589: hair dryer
590: hand-held computer
591: handkerchief
592: hard disk drive
593: harmonica
594: harp
595: harvester
596: hatchet
597: holster
598: home theater
599: honeycomb
600: hook
601: hoop skirt
602: horizontal bar
603: horse-drawn vehicle
604: hourglass
605: iPod
606: clothes iron
607: jack-o'-lantern
608: jeans
609: jeep
610: T-shirt
611: jigsaw puzzle
612: pulled rickshaw
613: joystick
614: kimono
615: knee pad
616: knot
617: lab coat
618: ladle
619: lampshade
620: laptop computer
621: lawn mower
622: lens cap
623: paper knife
624: library
625: lifeboat
626: lighter
627: limousine
628: ocean liner
629: lipstick
630: slip-on shoe
631: lotion
632: speaker
633: loupe
634: sawmill
635: magnetic compass
636: mail bag
637: mailbox
638: tights
639: tank suit
640: manhole cover
641: maraca
642: marimba
643: mask
644: match
645: maypole
646: maze
647: measuring cup
648: medicine chest
649: megalith
650: microphone
651: microwave oven
652: military uniform
653: milk can
654: minibus
655: miniskirt
656: minivan
657: missile
658: mitten
659: mixing bowl
660: mobile home
661: Model T
662: modem
663: monastery
664: monitor
665: moped
666: mortar
667: square academic cap
668: mosque
669: mosquito net
670: scooter
671: mountain bike
672: tent
673: computer mouse
674: mousetrap
675: moving van
676: muzzle
677: nail
678: neck brace
679: necklace
680: nipple
681: notebook computer
682: obelisk
683: oboe
684: ocarina
685: odometer
686: oil filter
687: organ
688: oscilloscope
689: overskirt
690: bullock cart
691: oxygen mask
692: packet
693: paddle
694: paddle wheel
695: padlock
696: paintbrush
697: pajamas
698: palace
699: pan flute
700: paper towel
701: parachute
702: parallel bars
703: park bench
704: parking meter
705: passenger car
706: patio
707: payphone
708: pedestal
709: pencil case
710: pencil sharpener
711: perfume
712: Petri dish
713: photocopier
714: plectrum
715: Pickelhaube
716: picket fence
717: pickup truck
718: pier
719: piggy bank
720: pill bottle
721: pillow
722: ping-pong ball
723: pinwheel
724: pirate ship
725: pitcher
726: hand plane
727: planetarium
728: plastic bag
729: plate rack
730: plow
731: plunger
732: Polaroid camera
733: pole
734: police van
735: poncho
736: billiard table
737: soda bottle
738: pot
739: potter's wheel
740: power drill
741: prayer rug
742: printer
743: prison
744: projectile
745: projector
746: hockey puck
747: punching bag
748: purse
749: quill
750: quilt
751: race car
752: racket
753: radiator
754: radio
755: radio telescope
756: rain barrel
757: recreational vehicle
758: reel
759: reflex camera
760: refrigerator
761: remote control
762: restaurant
763: revolver
764: rifle
765: rocking chair
766: rotisserie
767: eraser
768: rugby ball
769: ruler
770: running shoe
771: safe
772: safety pin
773: salt shaker
774: sandal
775: sarong
776: saxophone
777: scabbard
778: weighing scale
779: school bus
780: schooner
781: scoreboard
782: CRT screen
783: screw
784: screwdriver
785: seat belt
786: sewing machine
787: shield
788: shoe store
789: shoji
790: shopping basket
791: shopping cart
792: shovel
793: shower cap
794: shower curtain
795: ski
796: ski mask
797: sleeping bag
798: slide rule
799: sliding door
800: slot machine
801: snorkel
802: snowmobile
803: snowplow
804: soap dispenser
805: soccer ball
806: sock
807: solar thermal collector
808: sombrero
809: soup bowl
810: space bar
811: space heater
812: space shuttle
813: spatula
814: motorboat
815: spider web
816: spindle
817: sports car
818: spotlight
819: stage
820: steam locomotive
821: through arch bridge
822: steel drum
823: stethoscope
824: scarf
825: stone wall
826: stopwatch
827: stove
828: strainer
829: tram
830: stretcher
831: couch
832: stupa
833: submarine
834: suit
835: sundial
836: sunglass
837: sunglasses
838: sunscreen
839: suspension bridge
840: mop
841: sweatshirt
842: swimsuit
843: swing
844: switch
845: syringe
846: table lamp
847: tank
848: tape player
849: teapot
850: teddy bear
851: television
852: tennis ball
853: thatched roof
854: front curtain
855: thimble
856: threshing machine
857: throne
858: tile roof
859: toaster
860: tobacco shop
861: toilet seat
862: torch
863: totem pole
864: tow truck
865: toy store
866: tractor
867: semi-trailer truck
868: tray
869: trench coat
870: tricycle
871: trimaran
872: tripod
873: triumphal arch
874: trolleybus
875: trombone
876: tub
877: turnstile
878: typewriter keyboard
879: umbrella
880: unicycle
881: upright piano
882: vacuum cleaner
883: vase
884: vault
885: velvet
886: vending machine
887: vestment
888: viaduct
889: violin
890: volleyball
891: waffle iron
892: wall clock
893: wallet
894: wardrobe
895: military aircraft
896: sink
897: washing machine
898: water bottle
899: water jug
900: water tower
901: whiskey jug
902: whistle
903: wig
904: window screen
905: window shade
906: Windsor tie
907: wine bottle
908: wing
909: wok
910: wooden spoon
911: wool
912: split-rail fence
913: shipwreck
914: yawl
915: yurt
916: website
917: comic book
918: crossword
919: traffic sign
920: traffic light
921: dust jacket
922: menu
923: plate
924: guacamole
925: consomme
926: hot pot
927: trifle
928: ice cream
929: ice pop
930: baguette
931: bagel
932: pretzel
933: cheeseburger
934: hot dog
935: mashed potato
936: cabbage
937: broccoli
938: cauliflower
939: zucchini
940: spaghetti squash
941: acorn squash
942: butternut squash
943: cucumber
944: artichoke
945: bell pepper
946: cardoon
947: mushroom
948: Granny Smith
949: strawberry
950: orange
951: lemon
952: fig
953: pineapple
954: banana
955: jackfruit
956: custard apple
957: pomegranate
958: hay
959: carbonara
960: chocolate syrup
961: dough
962: meatloaf
963: pizza
964: pot pie
965: burrito
966: red wine
967: espresso
968: cup
969: eggnog
970: alp
971: bubble
972: cliff
973: coral reef
974: geyser
975: lakeshore
976: promontory
977: shoal
978: seashore
979: valley
980: volcano
981: baseball player
982: bridegroom
983: scuba diver
984: rapeseed
985: daisy
986: yellow lady's slipper
987: corn
988: acorn
989: rose hip
990: horse chestnut seed
991: coral fungus
992: agaric
993: gyromitra
994: stinkhorn mushroom
995: earth star
996: hen-of-the-woods
997: bolete
998: ear
999: toilet paper
# Download script/URL (optional)
download: data/scripts/get_imagenet1000.sh
================================================
FILE: data/Objects365.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Objects365 dataset https://www.objects365.org/ by Megvii
# Example usage: python train.py --data Objects365.yaml
# parent
# ├── yolov5
# └── datasets
# └── Objects365 ← downloads here (712 GB = 367G data + 345G zips)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/Objects365 # dataset root dir
train: images/train # train images (relative to 'path') 1742289 images
val: images/val # val images (relative to 'path') 80000 images
test: # test images (optional)
# Classes
names:
0: Person
1: Sneakers
2: Chair
3: Other Shoes
4: Hat
5: Car
6: Lamp
7: Glasses
8: Bottle
9: Desk
10: Cup
11: Street Lights
12: Cabinet/shelf
13: Handbag/Satchel
14: Bracelet
15: Plate
16: Picture/Frame
17: Helmet
18: Book
19: Gloves
20: Storage box
21: Boat
22: Leather Shoes
23: Flower
24: Bench
25: Potted Plant
26: Bowl/Basin
27: Flag
28: Pillow
29: Boots
30: Vase
31: Microphone
32: Necklace
33: Ring
34: SUV
35: Wine Glass
36: Belt
37: Monitor/TV
38: Backpack
39: Umbrella
40: Traffic Light
41: Speaker
42: Watch
43: Tie
44: Trash bin Can
45: Slippers
46: Bicycle
47: Stool
48: Barrel/bucket
49: Van
50: Couch
51: Sandals
52: Basket
53: Drum
54: Pen/Pencil
55: Bus
56: Wild Bird
57: High Heels
58: Motorcycle
59: Guitar
60: Carpet
61: Cell Phone
62: Bread
63: Camera
64: Canned
65: Truck
66: Traffic cone
67: Cymbal
68: Lifesaver
69: Towel
70: Stuffed Toy
71: Candle
72: Sailboat
73: Laptop
74: Awning
75: Bed
76: Faucet
77: Tent
78: Horse
79: Mirror
80: Power outlet
81: Sink
82: Apple
83: Air Conditioner
84: Knife
85: Hockey Stick
86: Paddle
87: Pickup Truck
88: Fork
89: Traffic Sign
90: Balloon
91: Tripod
92: Dog
93: Spoon
94: Clock
95: Pot
96: Cow
97: Cake
98: Dinning Table
99: Sheep
100: Hanger
101: Blackboard/Whiteboard
102: Napkin
103: Other Fish
104: Orange/Tangerine
105: Toiletry
106: Keyboard
107: Tomato
108: Lantern
109: Machinery Vehicle
110: Fan
111: Green Vegetables
112: Banana
113: Baseball Glove
114: Airplane
115: Mouse
116: Train
117: Pumpkin
118: Soccer
119: Skiboard
120: Luggage
121: Nightstand
122: Tea pot
123: Telephone
124: Trolley
125: Head Phone
126: Sports Car
127: Stop Sign
128: Dessert
129: Scooter
130: Stroller
131: Crane
132: Remote
133: Refrigerator
134: Oven
135: Lemon
136: Duck
137: Baseball Bat
138: Surveillance Camera
139: Cat
140: Jug
141: Broccoli
142: Piano
143: Pizza
144: Elephant
145: Skateboard
146: Surfboard
147: Gun
148: Skating and Skiing shoes
149: Gas stove
150: Donut
151: Bow Tie
152: Carrot
153: Toilet
154: Kite
155: Strawberry
156: Other Balls
157: Shovel
158: Pepper
159: Computer Box
160: Toilet Paper
161: Cleaning Products
162: Chopsticks
163: Microwave
164: Pigeon
165: Baseball
166: Cutting/chopping Board
167: Coffee Table
168: Side Table
169: Scissors
170: Marker
171: Pie
172: Ladder
173: Snowboard
174: Cookies
175: Radiator
176: Fire Hydrant
177: Basketball
178: Zebra
179: Grape
180: Giraffe
181: Potato
182: Sausage
183: Tricycle
184: Violin
185: Egg
186: Fire Extinguisher
187: Candy
188: Fire Truck
189: Billiards
190: Converter
191: Bathtub
192: Wheelchair
193: Golf Club
194: Briefcase
195: Cucumber
196: Cigar/Cigarette
197: Paint Brush
198: Pear
199: Heavy Truck
200: Hamburger
201: Extractor
202: Extension Cord
203: Tong
204: Tennis Racket
205: Folder
206: American Football
207: earphone
208: Mask
209: Kettle
210: Tennis
211: Ship
212: Swing
213: Coffee Machine
214: Slide
215: Carriage
216: Onion
217: Green beans
218: Projector
219: Frisbee
220: Washing Machine/Drying Machine
221: Chicken
222: Printer
223: Watermelon
224: Saxophone
225: Tissue
226: Toothbrush
227: Ice cream
228: Hot-air balloon
229: Cello
230: French Fries
231: Scale
232: Trophy
233: Cabbage
234: Hot dog
235: Blender
236: Peach
237: Rice
238: Wallet/Purse
239: Volleyball
240: Deer
241: Goose
242: Tape
243: Tablet
244: Cosmetics
245: Trumpet
246: Pineapple
247: Golf Ball
248: Ambulance
249: Parking meter
250: Mango
251: Key
252: Hurdle
253: Fishing Rod
254: Medal
255: Flute
256: Brush
257: Penguin
258: Megaphone
259: Corn
260: Lettuce
261: Garlic
262: Swan
263: Helicopter
264: Green Onion
265: Sandwich
266: Nuts
267: Speed Limit Sign
268: Induction Cooker
269: Broom
270: Trombone
271: Plum
272: Rickshaw
273: Goldfish
274: Kiwi fruit
275: Router/modem
276: Poker Card
277: Toaster
278: Shrimp
279: Sushi
280: Cheese
281: Notepaper
282: Cherry
283: Pliers
284: CD
285: Pasta
286: Hammer
287: Cue
288: Avocado
289: Hamimelon
290: Flask
291: Mushroom
292: Screwdriver
293: Soap
294: Recorder
295: Bear
296: Eggplant
297: Board Eraser
298: Coconut
299: Tape Measure/Ruler
300: Pig
301: Showerhead
302: Globe
303: Chips
304: Steak
305: Crosswalk Sign
306: Stapler
307: Camel
308: Formula 1
309: Pomegranate
310: Dishwasher
311: Crab
312: Hoverboard
313: Meat ball
314: Rice Cooker
315: Tuba
316: Calculator
317: Papaya
318: Antelope
319: Parrot
320: Seal
321: Butterfly
322: Dumbbell
323: Donkey
324: Lion
325: Urinal
326: Dolphin
327: Electric Drill
328: Hair Dryer
329: Egg tart
330: Jellyfish
331: Treadmill
332: Lighter
333: Grapefruit
334: Game board
335: Mop
336: Radish
337: Baozi
338: Target
339: French
340: Spring Rolls
341: Monkey
342: Rabbit
343: Pencil Case
344: Yak
345: Red Cabbage
346: Binoculars
347: Asparagus
348: Barbell
349: Scallop
350: Noddles
351: Comb
352: Dumpling
353: Oyster
354: Table Tennis paddle
355: Cosmetics Brush/Eyeliner Pencil
356: Chainsaw
357: Eraser
358: Lobster
359: Durian
360: Okra
361: Lipstick
362: Cosmetics Mirror
363: Curling
364: Table Tennis
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
from tqdm import tqdm
from utils.general import Path, check_requirements, download, np, xyxy2xywhn
check_requirements('pycocotools>=2.0')
from pycocotools.coco import COCO
# Make Directories
dir = Path(yaml['path']) # dataset root dir
for p in 'images', 'labels':
(dir / p).mkdir(parents=True, exist_ok=True)
for q in 'train', 'val':
(dir / p / q).mkdir(parents=True, exist_ok=True)
# Train, Val Splits
for split, patches in [('train', 50 + 1), ('val', 43 + 1)]:
print(f"Processing {split} in {patches} patches ...")
images, labels = dir / 'images' / split, dir / 'labels' / split
# Download
url = f"https://dorc.ks3-cn-beijing.ksyun.com/data-set/2020Objects365%E6%95%B0%E6%8D%AE%E9%9B%86/{split}/"
if split == 'train':
download([f'{url}zhiyuan_objv2_{split}.tar.gz'], dir=dir, delete=False) # annotations json
download([f'{url}patch{i}.tar.gz' for i in range(patches)], dir=images, curl=True, delete=False, threads=8)
elif split == 'val':
download([f'{url}zhiyuan_objv2_{split}.json'], dir=dir, delete=False) # annotations json
download([f'{url}images/v1/patch{i}.tar.gz' for i in range(15 + 1)], dir=images, curl=True, delete=False, threads=8)
download([f'{url}images/v2/patch{i}.tar.gz' for i in range(16, patches)], dir=images, curl=True, delete=False, threads=8)
# Move
for f in tqdm(images.rglob('*.jpg'), desc=f'Moving {split} images'):
f.rename(images / f.name) # move to /images/{split}
# Labels
coco = COCO(dir / f'zhiyuan_objv2_{split}.json')
names = [x["name"] for x in coco.loadCats(coco.getCatIds())]
for cid, cat in enumerate(names):
catIds = coco.getCatIds(catNms=[cat])
imgIds = coco.getImgIds(catIds=catIds)
for im in tqdm(coco.loadImgs(imgIds), desc=f'Class {cid + 1}/{len(names)} {cat}'):
width, height = im["width"], im["height"]
path = Path(im["file_name"]) # image filename
try:
with open(labels / path.with_suffix('.txt').name, 'a') as file:
annIds = coco.getAnnIds(imgIds=im["id"], catIds=catIds, iscrowd=False)
for a in coco.loadAnns(annIds):
x, y, w, h = a['bbox'] # bounding box in xywh (xy top-left corner)
xyxy = np.array([x, y, x + w, y + h])[None] # pixels(1,4)
x, y, w, h = xyxy2xywhn(xyxy, w=width, h=height, clip=True)[0] # normalized and clipped
file.write(f"{cid} {x:.5f} {y:.5f} {w:.5f} {h:.5f}\n")
except Exception as e:
print(e)
================================================
FILE: data/SKU-110K.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# SKU-110K retail items dataset https://github.com/eg4000/SKU110K_CVPR19 by Trax Retail
# Example usage: python train.py --data SKU-110K.yaml
# parent
# ├── yolov5
# └── datasets
# └── SKU-110K ← downloads here (13.6 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/SKU-110K # dataset root dir
train: train.txt # train images (relative to 'path') 8219 images
val: val.txt # val images (relative to 'path') 588 images
test: test.txt # test images (optional) 2936 images
# Classes
names:
0: object
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
import shutil
from tqdm import tqdm
from utils.general import np, pd, Path, download, xyxy2xywh
# Download
dir = Path(yaml['path']) # dataset root dir
parent = Path(dir.parent) # download dir
urls = ['http://trax-geometry.s3.amazonaws.com/cvpr_challenge/SKU110K_fixed.tar.gz']
download(urls, dir=parent, delete=False)
# Rename directories
if dir.exists():
shutil.rmtree(dir)
(parent / 'SKU110K_fixed').rename(dir) # rename dir
(dir / 'labels').mkdir(parents=True, exist_ok=True) # create labels dir
# Convert labels
names = 'image', 'x1', 'y1', 'x2', 'y2', 'class', 'image_width', 'image_height' # column names
for d in 'annotations_train.csv', 'annotations_val.csv', 'annotations_test.csv':
x = pd.read_csv(dir / 'annotations' / d, names=names).values # annotations
images, unique_images = x[:, 0], np.unique(x[:, 0])
with open((dir / d).with_suffix('.txt').__str__().replace('annotations_', ''), 'w') as f:
f.writelines(f'./images/{s}\n' for s in unique_images)
for im in tqdm(unique_images, desc=f'Converting {dir / d}'):
cls = 0 # single-class dataset
with open((dir / 'labels' / im).with_suffix('.txt'), 'a') as f:
for r in x[images == im]:
w, h = r[6], r[7] # image width, height
xywh = xyxy2xywh(np.array([[r[1] / w, r[2] / h, r[3] / w, r[4] / h]]))[0] # instance
f.write(f"{cls} {xywh[0]:.5f} {xywh[1]:.5f} {xywh[2]:.5f} {xywh[3]:.5f}\n") # write label
================================================
FILE: data/VOC.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# PASCAL VOC dataset http://host.robots.ox.ac.uk/pascal/VOC by University of Oxford
# Example usage: python train.py --data VOC.yaml
# parent
# ├── yolov5
# └── datasets
# └── VOC ← downloads here (2.8 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/VOC
train: # train images (relative to 'path') 16551 images
- images/train2012
- images/train2007
- images/val2012
- images/val2007
val: # val images (relative to 'path') 4952 images
- images/test2007
test: # test images (optional)
- images/test2007
# Classes
names:
0: aeroplane
1: bicycle
2: bird
3: boat
4: bottle
5: bus
6: car
7: cat
8: chair
9: cow
10: diningtable
11: dog
12: horse
13: motorbike
14: person
15: pottedplant
16: sheep
17: sofa
18: train
19: tvmonitor
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
import xml.etree.ElementTree as ET
from tqdm import tqdm
from utils.general import download, Path
def convert_label(path, lb_path, year, image_id):
def convert_box(size, box):
dw, dh = 1. / size[0], 1. / size[1]
x, y, w, h = (box[0] + box[1]) / 2.0 - 1, (box[2] + box[3]) / 2.0 - 1, box[1] - box[0], box[3] - box[2]
return x * dw, y * dh, w * dw, h * dh
in_file = open(path / f'VOC{year}/Annotations/{image_id}.xml')
out_file = open(lb_path, 'w')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
names = list(yaml['names'].values()) # names list
for obj in root.iter('object'):
cls = obj.find('name').text
if cls in names and int(obj.find('difficult').text) != 1:
xmlbox = obj.find('bndbox')
bb = convert_box((w, h), [float(xmlbox.find(x).text) for x in ('xmin', 'xmax', 'ymin', 'ymax')])
cls_id = names.index(cls) # class id
out_file.write(" ".join([str(a) for a in (cls_id, *bb)]) + '\n')
# Download
dir = Path(yaml['path']) # dataset root dir
url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
urls = [f'{url}VOCtrainval_06-Nov-2007.zip', # 446MB, 5012 images
f'{url}VOCtest_06-Nov-2007.zip', # 438MB, 4953 images
f'{url}VOCtrainval_11-May-2012.zip'] # 1.95GB, 17126 images
download(urls, dir=dir / 'images', delete=False, curl=True, threads=3)
# Convert
path = dir / 'images/VOCdevkit'
for year, image_set in ('2012', 'train'), ('2012', 'val'), ('2007', 'train'), ('2007', 'val'), ('2007', 'test'):
imgs_path = dir / 'images' / f'{image_set}{year}'
lbs_path = dir / 'labels' / f'{image_set}{year}'
imgs_path.mkdir(exist_ok=True, parents=True)
lbs_path.mkdir(exist_ok=True, parents=True)
with open(path / f'VOC{year}/ImageSets/Main/{image_set}.txt') as f:
image_ids = f.read().strip().split()
for id in tqdm(image_ids, desc=f'{image_set}{year}'):
f = path / f'VOC{year}/JPEGImages/{id}.jpg' # old img path
lb_path = (lbs_path / f.name).with_suffix('.txt') # new label path
f.rename(imgs_path / f.name) # move image
convert_label(path, lb_path, year, id) # convert labels to YOLO format
================================================
FILE: data/VisDrone.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# VisDrone2019-DET dataset https://github.com/VisDrone/VisDrone-Dataset by Tianjin University
# Example usage: python train.py --data VisDrone.yaml
# parent
# ├── yolov5
# └── datasets
# └── VisDrone ← downloads here (2.3 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/VisDrone # dataset root dir
train: VisDrone2019-DET-train/images # train images (relative to 'path') 6471 images
val: VisDrone2019-DET-val/images # val images (relative to 'path') 548 images
test: VisDrone2019-DET-test-dev/images # test images (optional) 1610 images
# Classes
names:
0: pedestrian
1: people
2: bicycle
3: car
4: van
5: truck
6: tricycle
7: awning-tricycle
8: bus
9: motor
# Download script/URL (optional) ---------------------------------------------------------------------------------------
download: |
from utils.general import download, os, Path
def visdrone2yolo(dir):
from PIL import Image
from tqdm import tqdm
def convert_box(size, box):
# Convert VisDrone box to YOLO xywh box
dw = 1. / size[0]
dh = 1. / size[1]
return (box[0] + box[2] / 2) * dw, (box[1] + box[3] / 2) * dh, box[2] * dw, box[3] * dh
(dir / 'labels').mkdir(parents=True, exist_ok=True) # make labels directory
pbar = tqdm((dir / 'annotations').glob('*.txt'), desc=f'Converting {dir}')
for f in pbar:
img_size = Image.open((dir / 'images' / f.name).with_suffix('.jpg')).size
lines = []
with open(f, 'r') as file: # read annotation.txt
for row in [x.split(',') for x in file.read().strip().splitlines()]:
if row[4] == '0': # VisDrone 'ignored regions' class 0
continue
cls = int(row[5]) - 1
box = convert_box(img_size, tuple(map(int, row[:4])))
lines.append(f"{cls} {' '.join(f'{x:.6f}' for x in box)}\n")
with open(str(f).replace(os.sep + 'annotations' + os.sep, os.sep + 'labels' + os.sep), 'w') as fl:
fl.writelines(lines) # write label.txt
# Download
dir = Path(yaml['path']) # dataset root dir
urls = ['https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-train.zip',
'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-val.zip',
'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-test-dev.zip',
'https://github.com/ultralytics/yolov5/releases/download/v1.0/VisDrone2019-DET-test-challenge.zip']
download(urls, dir=dir, curl=True, threads=4)
# Convert
for d in 'VisDrone2019-DET-train', 'VisDrone2019-DET-val', 'VisDrone2019-DET-test-dev':
visdrone2yolo(dir / d) # convert VisDrone annotations to YOLO labels
================================================
FILE: data/coco.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# COCO 2017 dataset http://cocodataset.org by Microsoft
# Example usage: python train.py --data coco.yaml
# parent
# ├── yolov5
# └── datasets
# └── coco ← downloads here (20.1 GB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/coco # dataset root dir
train: train2017.txt # train images (relative to 'path') 118287 images
val: val2017.txt # val images (relative to 'path') 5000 images
test: test-dev2017.txt # 20288 of 40670 images, submit to https://competitions.codalab.org/competitions/20794
# Classes
names:
0: person
1: bicycle
2: car
3: motorcycle
4: airplane
5: bus
6: train
7: truck
8: boat
9: traffic light
10: fire hydrant
11: stop sign
12: parking meter
13: bench
14: bird
15: cat
16: dog
17: horse
18: sheep
19: cow
20: elephant
21: bear
22: zebra
23: giraffe
24: backpack
25: umbrella
26: handbag
27: tie
28: suitcase
29: frisbee
30: skis
31: snowboard
32: sports ball
33: kite
34: baseball bat
35: baseball glove
36: skateboard
37: surfboard
38: tennis racket
39: bottle
40: wine glass
41: cup
42: fork
43: knife
44: spoon
45: bowl
46: banana
47: apple
48: sandwich
49: orange
50: broccoli
51: carrot
52: hot dog
53: pizza
54: donut
55: cake
56: chair
57: couch
58: potted plant
59: bed
60: dining table
61: toilet
62: tv
63: laptop
64: mouse
65: remote
66: keyboard
67: cell phone
68: microwave
69: oven
70: toaster
71: sink
72: refrigerator
73: book
74: clock
75: vase
76: scissors
77: teddy bear
78: hair drier
79: toothbrush
# Download script/URL (optional)
download: |
from utils.general import download, Path
# Download labels
segments = False # segment or box labels
dir = Path(yaml['path']) # dataset root dir
url = 'https://github.com/ultralytics/yolov5/releases/download/v1.0/'
urls = [url + ('coco2017labels-segments.zip' if segments else 'coco2017labels.zip')] # labels
download(urls, dir=dir.parent)
# Download data
urls = ['http://images.cocodataset.org/zips/train2017.zip', # 19G, 118k images
'http://images.cocodataset.org/zips/val2017.zip', # 1G, 5k images
'http://images.cocodataset.org/zips/test2017.zip'] # 7G, 41k images (optional)
download(urls, dir=dir / 'images', threads=3)
================================================
FILE: data/coco128-seg.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# COCO128-seg dataset https://www.kaggle.com/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
# Example usage: python train.py --data coco128.yaml
# parent
# ├── yolov5
# └── datasets
# └── coco128-seg ← downloads here (7 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/coco128-seg # dataset root dir
train: images/train2017 # train images (relative to 'path') 128 images
val: images/train2017 # val images (relative to 'path') 128 images
test: # test images (optional)
# Classes
names:
0: person
1: bicycle
2: car
3: motorcycle
4: airplane
5: bus
6: train
7: truck
8: boat
9: traffic light
10: fire hydrant
11: stop sign
12: parking meter
13: bench
14: bird
15: cat
16: dog
17: horse
18: sheep
19: cow
20: elephant
21: bear
22: zebra
23: giraffe
24: backpack
25: umbrella
26: handbag
27: tie
28: suitcase
29: frisbee
30: skis
31: snowboard
32: sports ball
33: kite
34: baseball bat
35: baseball glove
36: skateboard
37: surfboard
38: tennis racket
39: bottle
40: wine glass
41: cup
42: fork
43: knife
44: spoon
45: bowl
46: banana
47: apple
48: sandwich
49: orange
50: broccoli
51: carrot
52: hot dog
53: pizza
54: donut
55: cake
56: chair
57: couch
58: potted plant
59: bed
60: dining table
61: toilet
62: tv
63: laptop
64: mouse
65: remote
66: keyboard
67: cell phone
68: microwave
69: oven
70: toaster
71: sink
72: refrigerator
73: book
74: clock
75: vase
76: scissors
77: teddy bear
78: hair drier
79: toothbrush
# Download script/URL (optional)
download: https://ultralytics.com/assets/coco128-seg.zip
================================================
FILE: data/coco128.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# COCO128 dataset https://www.kaggle.com/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
# Example usage: python train.py --data coco128.yaml
# parent
# ├── yolov5
# └── datasets
# └── coco128 ← downloads here (7 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/coco128 # dataset root dir
train: images/train2017 # train images (relative to 'path') 128 images
val: images/train2017 # val images (relative to 'path') 128 images
test: # test images (optional)
# Classes
names:
0: person
1: bicycle
2: car
3: motorcycle
4: airplane
5: bus
6: train
7: truck
8: boat
9: traffic light
10: fire hydrant
11: stop sign
12: parking meter
13: bench
14: bird
15: cat
16: dog
17: horse
18: sheep
19: cow
20: elephant
21: bear
22: zebra
23: giraffe
24: backpack
25: umbrella
26: handbag
27: tie
28: suitcase
29: frisbee
30: skis
31: snowboard
32: sports ball
33: kite
34: baseball bat
35: baseball glove
36: skateboard
37: surfboard
38: tennis racket
39: bottle
40: wine glass
41: cup
42: fork
43: knife
44: spoon
45: bowl
46: banana
47: apple
48: sandwich
49: orange
50: broccoli
51: carrot
52: hot dog
53: pizza
54: donut
55: cake
56: chair
57: couch
58: potted plant
59: bed
60: dining table
61: toilet
62: tv
63: laptop
64: mouse
65: remote
66: keyboard
67: cell phone
68: microwave
69: oven
70: toaster
71: sink
72: refrigerator
73: book
74: clock
75: vase
76: scissors
77: teddy bear
78: hair drier
79: toothbrush
# Download script/URL (optional)
download: https://ultralytics.com/assets/coco128.zip
================================================
FILE: data/hyps/hyp.Objects365.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for Objects365 training
# python train.py --weights yolov5m.pt --data Objects365.yaml --evolve
# See Hyperparameter Evolution tutorial for details https://github.com/ultralytics/yolov5#tutorials
lr0: 0.00258
lrf: 0.17
momentum: 0.779
weight_decay: 0.00058
warmup_epochs: 1.33
warmup_momentum: 0.86
warmup_bias_lr: 0.0711
box: 0.0539
cls: 0.299
cls_pw: 0.825
obj: 0.632
obj_pw: 1.0
iou_t: 0.2
anchor_t: 3.44
anchors: 3.2
fl_gamma: 0.0
hsv_h: 0.0188
hsv_s: 0.704
hsv_v: 0.36
degrees: 0.0
translate: 0.0902
scale: 0.491
shear: 0.0
perspective: 0.0
flipud: 0.0
fliplr: 0.5
mosaic: 1.0
mixup: 0.0
copy_paste: 0.0
================================================
FILE: data/hyps/hyp.VOC.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for VOC training
# python train.py --batch 128 --weights yolov5m6.pt --data VOC.yaml --epochs 50 --img 512 --hyp hyp.scratch-med.yaml --evolve
# See Hyperparameter Evolution tutorial for details https://github.com/ultralytics/yolov5#tutorials
# YOLOv5 Hyperparameter Evolution Results
# Best generation: 467
# Last generation: 996
# metrics/precision, metrics/recall, metrics/mAP_0.5, metrics/mAP_0.5:0.95, val/box_loss, val/obj_loss, val/cls_loss
# 0.87729, 0.85125, 0.91286, 0.72664, 0.0076739, 0.0042529, 0.0013865
lr0: 0.00334
lrf: 0.15135
momentum: 0.74832
weight_decay: 0.00025
warmup_epochs: 3.3835
warmup_momentum: 0.59462
warmup_bias_lr: 0.18657
box: 0.02
cls: 0.21638
cls_pw: 0.5
obj: 0.51728
obj_pw: 0.67198
iou_t: 0.2
anchor_t: 3.3744
fl_gamma: 0.0
hsv_h: 0.01041
hsv_s: 0.54703
hsv_v: 0.27739
degrees: 0.0
translate: 0.04591
scale: 0.75544
shear: 0.0
perspective: 0.0
flipud: 0.0
fliplr: 0.5
mosaic: 0.85834
mixup: 0.04266
copy_paste: 0.0
anchors: 3.412
================================================
FILE: data/hyps/hyp.no-augmentation.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters when using Albumentations frameworks
# python train.py --hyp hyp.no-augmentation.yaml
# See https://github.com/ultralytics/yolov5/pull/3882 for YOLOv5 + Albumentations Usage examples
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
# this parameters are all zero since we want to use albumentation framework
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0 # image HSV-Hue augmentation (fraction)
hsv_s: 0 # image HSV-Saturation augmentation (fraction)
hsv_v: 0 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0 # image translation (+/- fraction)
scale: 0 # image scale (+/- gain)
shear: 0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.0 # image flip left-right (probability)
mosaic: 0.0 # image mosaic (probability)
mixup: 0.0 # image mixup (probability)
copy_paste: 0.0 # segment copy-paste (probability)
================================================
FILE: data/hyps/hyp.scratch-high.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for high-augmentation COCO training from scratch
# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.9 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.1 # image mixup (probability)
copy_paste: 0.1 # segment copy-paste (probability)
================================================
FILE: data/hyps/hyp.scratch-low.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for low-augmentation COCO training from scratch
# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.5 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 1.0 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.5 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.0 # image mixup (probability)
copy_paste: 0.0 # segment copy-paste (probability)
================================================
FILE: data/hyps/hyp.scratch-med.yaml
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Hyperparameters for medium-augmentation COCO training from scratch
# python train.py --batch 32 --cfg yolov5m6.yaml --weights '' --data coco.yaml --img 1280 --epochs 300
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.9 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.1 # image mixup (probability)
copy_paste: 0.0 # segment copy-paste (probability)
================================================
FILE: data/scripts/download_weights.sh
================================================
#!/bin/bash
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Download latest models from https://github.com/ultralytics/yolov5/releases
# Example usage: bash data/scripts/download_weights.sh
# parent
# └── yolov5
# ├── yolov5s.pt ← downloads here
# ├── yolov5m.pt
# └── ...
python - <\n",
"\n",
"\n",
"\n",
" "
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "0eq1SMWl6Sfn"
},
"source": [
"# 2. Validate\n",
"Validate a model's accuracy on the [COCO](https://cocodataset.org/#home) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"colab": {
"base_uri": "https://localhost:8080/"
},
"id": "WQPtK1QYVaD_",
"outputId": "9d751d8c-bee8-4339-cf30-9854ca530449"
},
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"Downloading https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017labels-segments.zip ...\n",
"Downloading http://images.cocodataset.org/zips/val2017.zip ...\n",
"######################################################################## 100.0%\n",
"######################################################################## 100.0%\n"
]
}
],
"source": [
"# Download COCO val\n",
"!bash data/scripts/get_coco.sh --val --segments # download (780M - 5000 images)"
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"colab": {
"base_uri": "https://localhost:8080/"
},
"id": "X58w8JLpMnjH",
"outputId": "a140d67a-02da-479e-9ddb-7d54bf9e407a"
},
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"\u001b[34m\u001b[1msegment/val: \u001b[0mdata=/content/yolov5/data/coco.yaml, weights=['yolov5s-seg.pt'], batch_size=32, imgsz=640, conf_thres=0.001, iou_thres=0.6, max_det=300, task=val, device=, workers=8, single_cls=False, augment=False, verbose=False, save_txt=False, save_hybrid=False, save_conf=False, save_json=False, project=runs/val-seg, name=exp, exist_ok=False, half=True, dnn=False\n",
"YOLOv5 🚀 v7.0-2-gc9d47ae Python-3.7.15 torch-1.12.1+cu113 CUDA:0 (Tesla T4, 15110MiB)\n",
"\n",
"Fusing layers... \n",
"YOLOv5s-seg summary: 224 layers, 7611485 parameters, 0 gradients, 26.4 GFLOPs\n",
"\u001b[34m\u001b[1mval: \u001b[0mScanning /content/datasets/coco/val2017... 4952 images, 48 backgrounds, 0 corrupt: 100% 5000/5000 [00:03<00:00, 1361.31it/s]\n",
"\u001b[34m\u001b[1mval: \u001b[0mNew cache created: /content/datasets/coco/val2017.cache\n",
" Class Images Instances Box(P R mAP50 mAP50-95) Mask(P R mAP50 mAP50-95): 100% 157/157 [01:54<00:00, 1.37it/s]\n",
" all 5000 36335 0.673 0.517 0.566 0.373 0.672 0.49 0.532 0.319\n",
"Speed: 0.6ms pre-process, 4.4ms inference, 2.9ms NMS per image at shape (32, 3, 640, 640)\n",
"Results saved to \u001b[1mruns/val-seg/exp\u001b[0m\n"
]
}
],
"source": [
"# Validate YOLOv5s-seg on COCO val\n",
"!python segment/val.py --weights yolov5s-seg.pt --data coco.yaml --img 640 --half"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "ZY2VXXXu74w5"
},
"source": [
"# 3. Train\n",
"\n",
"
"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "0eq1SMWl6Sfn"
},
"source": [
"# 2. Validate\n",
"Validate a model's accuracy on the [COCO](https://cocodataset.org/#home) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"colab": {
"base_uri": "https://localhost:8080/"
},
"id": "WQPtK1QYVaD_",
"outputId": "9d751d8c-bee8-4339-cf30-9854ca530449"
},
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"Downloading https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017labels-segments.zip ...\n",
"Downloading http://images.cocodataset.org/zips/val2017.zip ...\n",
"######################################################################## 100.0%\n",
"######################################################################## 100.0%\n"
]
}
],
"source": [
"# Download COCO val\n",
"!bash data/scripts/get_coco.sh --val --segments # download (780M - 5000 images)"
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"colab": {
"base_uri": "https://localhost:8080/"
},
"id": "X58w8JLpMnjH",
"outputId": "a140d67a-02da-479e-9ddb-7d54bf9e407a"
},
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"\u001b[34m\u001b[1msegment/val: \u001b[0mdata=/content/yolov5/data/coco.yaml, weights=['yolov5s-seg.pt'], batch_size=32, imgsz=640, conf_thres=0.001, iou_thres=0.6, max_det=300, task=val, device=, workers=8, single_cls=False, augment=False, verbose=False, save_txt=False, save_hybrid=False, save_conf=False, save_json=False, project=runs/val-seg, name=exp, exist_ok=False, half=True, dnn=False\n",
"YOLOv5 🚀 v7.0-2-gc9d47ae Python-3.7.15 torch-1.12.1+cu113 CUDA:0 (Tesla T4, 15110MiB)\n",
"\n",
"Fusing layers... \n",
"YOLOv5s-seg summary: 224 layers, 7611485 parameters, 0 gradients, 26.4 GFLOPs\n",
"\u001b[34m\u001b[1mval: \u001b[0mScanning /content/datasets/coco/val2017... 4952 images, 48 backgrounds, 0 corrupt: 100% 5000/5000 [00:03<00:00, 1361.31it/s]\n",
"\u001b[34m\u001b[1mval: \u001b[0mNew cache created: /content/datasets/coco/val2017.cache\n",
" Class Images Instances Box(P R mAP50 mAP50-95) Mask(P R mAP50 mAP50-95): 100% 157/157 [01:54<00:00, 1.37it/s]\n",
" all 5000 36335 0.673 0.517 0.566 0.373 0.672 0.49 0.532 0.319\n",
"Speed: 0.6ms pre-process, 4.4ms inference, 2.9ms NMS per image at shape (32, 3, 640, 640)\n",
"Results saved to \u001b[1mruns/val-seg/exp\u001b[0m\n"
]
}
],
"source": [
"# Validate YOLOv5s-seg on COCO val\n",
"!python segment/val.py --weights yolov5s-seg.pt --data coco.yaml --img 640 --half"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "ZY2VXXXu74w5"
},
"source": [
"# 3. Train\n",
"\n",
"

"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "Lay2WsTjNJzP"
},
"source": [
"## ClearML Logging and Automation 🌟 NEW\n",
"\n",
"[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
"\n",
"- `pip install clearml`\n",
"- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
"\n",
"You'll get all the great expected features from an experiment manager: live updates, model upload, experiment comparison etc. but ClearML also tracks uncommitted changes and installed packages for example. Thanks to that ClearML Tasks (which is what we call experiments) are also reproducible on different machines! With only 1 extra line, we can schedule a YOLOv5 training task on a queue to be executed by any number of ClearML Agents (workers).\n",
"\n",
"You can use ClearML Data to version your dataset and then pass it to YOLOv5 simply using its unique ID. This will help you keep track of your data without adding extra hassle. Explore the [ClearML Tutorial](https://docs.ultralytics.com/yolov5/tutorials/clearml_logging_integration) for details!\n",
"\n",
"\n",
""
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "-WPvRbS5Swl6"
},
"source": [
"## Local Logging\n",
"\n",
"Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
"\n",
"This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices. \n",
"\n",
"\n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "Zelyeqbyt3GD"
},
"source": [
"# Environments\n",
"\n",
"YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
"\n",
"- **Notebooks** with free GPU: \n",
"- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/google_cloud_quickstart_tutorial/)\n",
"- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/aws_quickstart_tutorial/)\n",
"- **Docker Image**. See [Docker Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/docker_image_quickstart_tutorial/) \n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "6Qu7Iesl0p54"
},
"source": [
"# Status\n",
"\n",
"\n",
"\n",
"If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "IEijrePND_2I"
},
"source": [
"# Appendix\n",
"\n",
"Additional content below."
]
},
{
"cell_type": "code",
"execution_count": null,
"metadata": {
"id": "GMusP4OAxFu6"
},
"outputs": [],
"source": [
"# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
"import torch\n",
"\n",
"model = torch.hub.load('ultralytics/yolov5', 'yolov5s-seg', force_reload=True, trust_repo=True) # or yolov5n - yolov5x6 or custom\n",
"im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
"results = model(im) # inference\n",
"results.print() # or .show(), .save(), .crop(), .pandas(), etc."
]
}
],
"metadata": {
"accelerator": "GPU",
"colab": {
"name": "YOLOv5 Segmentation Tutorial",
"provenance": [],
"toc_visible": true
},
"kernelspec": {
"display_name": "Python 3 (ipykernel)",
"language": "python",
"name": "python3"
},
"language_info": {
"codemirror_mode": {
"name": "ipython",
"version": 3
},
"file_extension": ".py",
"mimetype": "text/x-python",
"name": "python",
"nbconvert_exporter": "python",
"pygments_lexer": "ipython3",
"version": "3.7.12"
}
},
"nbformat": 4,
"nbformat_minor": 0
}
================================================
FILE: segment/val.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""
Validate a trained YOLOv5 segment model on a segment dataset.
Usage:
$ bash data/scripts/get_coco.sh --val --segments # download COCO-segments val split (1G, 5000 images)
$ python segment/val.py --weights yolov5s-seg.pt --data coco.yaml --img 640 # validate COCO-segments
Usage - formats:
$ python segment/val.py --weights yolov5s-seg.pt # PyTorch
yolov5s-seg.torchscript # TorchScript
yolov5s-seg.onnx # ONNX Runtime or OpenCV DNN with --dnn
yolov5s-seg_openvino_label # OpenVINO
yolov5s-seg.engine # TensorRT
yolov5s-seg.mlmodel # CoreML (macOS-only)
yolov5s-seg_saved_model # TensorFlow SavedModel
yolov5s-seg.pb # TensorFlow GraphDef
yolov5s-seg.tflite # TensorFlow Lite
yolov5s-seg_edgetpu.tflite # TensorFlow Edge TPU
yolov5s-seg_paddle_model # PaddlePaddle
"""
import argparse
import json
import os
import subprocess
import sys
from multiprocessing.pool import ThreadPool
from pathlib import Path
import numpy as np
import torch
from tqdm import tqdm
FILE = Path(__file__).resolve()
ROOT = FILE.parents[1] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
import torch.nn.functional as F
from models.common import DetectMultiBackend
from models.yolo import SegmentationModel
from utils.callbacks import Callbacks
from utils.general import (
LOGGER,
NUM_THREADS,
TQDM_BAR_FORMAT,
Profile,
check_dataset,
check_img_size,
check_requirements,
check_yaml,
coco80_to_coco91_class,
colorstr,
increment_path,
non_max_suppression,
print_args,
scale_boxes,
xywh2xyxy,
xyxy2xywh,
)
from utils.metrics import ConfusionMatrix, box_iou
from utils.plots import output_to_target, plot_val_study
from utils.segment.dataloaders import create_dataloader
from utils.segment.general import mask_iou, process_mask, process_mask_native, scale_image
from utils.segment.metrics import Metrics, ap_per_class_box_and_mask
from utils.segment.plots import plot_images_and_masks
from utils.torch_utils import de_parallel, select_device, smart_inference_mode
def save_one_txt(predn, save_conf, shape, file):
"""Saves detection results in txt format; includes class, xywh (normalized), optionally confidence if `save_conf` is
True.
"""
gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
for *xyxy, conf, cls in predn.tolist():
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
with open(file, "a") as f:
f.write(("%g " * len(line)).rstrip() % line + "\n")
def save_one_json(predn, jdict, path, class_map, pred_masks):
"""
Saves a JSON file with detection results including bounding boxes, category IDs, scores, and segmentation masks.
Example JSON result: {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}.
"""
from pycocotools.mask import encode
def single_encode(x):
rle = encode(np.asarray(x[:, :, None], order="F", dtype="uint8"))[0]
rle["counts"] = rle["counts"].decode("utf-8")
return rle
image_id = int(path.stem) if path.stem.isnumeric() else path.stem
box = xyxy2xywh(predn[:, :4]) # xywh
box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
pred_masks = np.transpose(pred_masks, (2, 0, 1))
with ThreadPool(NUM_THREADS) as pool:
rles = pool.map(single_encode, pred_masks)
for i, (p, b) in enumerate(zip(predn.tolist(), box.tolist())):
jdict.append(
{
"image_id": image_id,
"category_id": class_map[int(p[5])],
"bbox": [round(x, 3) for x in b],
"score": round(p[4], 5),
"segmentation": rles[i],
}
)
def process_batch(detections, labels, iouv, pred_masks=None, gt_masks=None, overlap=False, masks=False):
"""
Return correct prediction matrix
Arguments:
detections (array[N, 6]), x1, y1, x2, y2, conf, class
labels (array[M, 5]), class, x1, y1, x2, y2
Returns:
correct (array[N, 10]), for 10 IoU levels
"""
if masks:
if overlap:
nl = len(labels)
index = torch.arange(nl, device=gt_masks.device).view(nl, 1, 1) + 1
gt_masks = gt_masks.repeat(nl, 1, 1) # shape(1,640,640) -> (n,640,640)
gt_masks = torch.where(gt_masks == index, 1.0, 0.0)
if gt_masks.shape[1:] != pred_masks.shape[1:]:
gt_masks = F.interpolate(gt_masks[None], pred_masks.shape[1:], mode="bilinear", align_corners=False)[0]
gt_masks = gt_masks.gt_(0.5)
iou = mask_iou(gt_masks.view(gt_masks.shape[0], -1), pred_masks.view(pred_masks.shape[0], -1))
else: # boxes
iou = box_iou(labels[:, 1:], detections[:, :4])
correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
correct_class = labels[:, 0:1] == detections[:, 5]
for i in range(len(iouv)):
x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
if x[0].shape[0]:
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
if x[0].shape[0] > 1:
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
# matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
correct[matches[:, 1].astype(int), i] = True
return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
@smart_inference_mode()
def run(
data,
weights=None, # model.pt path(s)
batch_size=32, # batch size
imgsz=640, # inference size (pixels)
conf_thres=0.001, # confidence threshold
iou_thres=0.6, # NMS IoU threshold
max_det=300, # maximum detections per image
task="val", # train, val, test, speed or study
device="", # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
single_cls=False, # treat as single-class dataset
augment=False, # augmented inference
verbose=False, # verbose output
save_txt=False, # save results to *.txt
save_hybrid=False, # save label+prediction hybrid results to *.txt
save_conf=False, # save confidences in --save-txt labels
save_json=False, # save a COCO-JSON results file
project=ROOT / "runs/val-seg", # save to project/name
name="exp", # save to project/name
exist_ok=False, # existing project/name ok, do not increment
half=True, # use FP16 half-precision inference
dnn=False, # use OpenCV DNN for ONNX inference
model=None,
dataloader=None,
save_dir=Path(""),
plots=True,
overlap=False,
mask_downsample_ratio=1,
compute_loss=None,
callbacks=Callbacks(),
):
if save_json:
check_requirements("pycocotools>=2.0.6")
process = process_mask_native # more accurate
else:
process = process_mask # faster
# Initialize/load model and set device
training = model is not None
if training: # called by train.py
device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
half &= device.type != "cpu" # half precision only supported on CUDA
model.half() if half else model.float()
nm = de_parallel(model).model[-1].nm # number of masks
else: # called directly
device = select_device(device, batch_size=batch_size)
# Directories
save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
(save_dir / "labels" if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Load model
model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
imgsz = check_img_size(imgsz, s=stride) # check image size
half = model.fp16 # FP16 supported on limited backends with CUDA
nm = de_parallel(model).model.model[-1].nm if isinstance(model, SegmentationModel) else 32 # number of masks
if engine:
batch_size = model.batch_size
else:
device = model.device
if not (pt or jit):
batch_size = 1 # export.py models default to batch-size 1
LOGGER.info(f"Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models")
# Data
data = check_dataset(data) # check
# Configure
model.eval()
cuda = device.type != "cpu"
is_coco = isinstance(data.get("val"), str) and data["val"].endswith(f"coco{os.sep}val2017.txt") # COCO dataset
nc = 1 if single_cls else int(data["nc"]) # number of classes
iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
niou = iouv.numel()
# Dataloader
if not training:
if pt and not single_cls: # check --weights are trained on --data
ncm = model.model.nc
assert ncm == nc, (
f"{weights} ({ncm} classes) trained on different --data than what you passed ({nc} "
f"classes). Pass correct combination of --weights and --data that are trained together."
)
model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
pad, rect = (0.0, False) if task == "speed" else (0.5, pt) # square inference for benchmarks
task = task if task in ("train", "val", "test") else "val" # path to train/val/test images
dataloader = create_dataloader(
data[task],
imgsz,
batch_size,
stride,
single_cls,
pad=pad,
rect=rect,
workers=workers,
prefix=colorstr(f"{task}: "),
overlap_mask=overlap,
mask_downsample_ratio=mask_downsample_ratio,
)[0]
seen = 0
confusion_matrix = ConfusionMatrix(nc=nc)
names = model.names if hasattr(model, "names") else model.module.names # get class names
if isinstance(names, (list, tuple)): # old format
names = dict(enumerate(names))
class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
s = ("%22s" + "%11s" * 10) % (
"Class",
"Images",
"Instances",
"Box(P",
"R",
"mAP50",
"mAP50-95)",
"Mask(P",
"R",
"mAP50",
"mAP50-95)",
)
dt = Profile(device=device), Profile(device=device), Profile(device=device)
metrics = Metrics()
loss = torch.zeros(4, device=device)
jdict, stats = [], []
# callbacks.run('on_val_start')
pbar = tqdm(dataloader, desc=s, bar_format=TQDM_BAR_FORMAT) # progress bar
for batch_i, (im, targets, paths, shapes, masks) in enumerate(pbar):
# callbacks.run('on_val_batch_start')
with dt[0]:
if cuda:
im = im.to(device, non_blocking=True)
targets = targets.to(device)
masks = masks.to(device)
masks = masks.float()
im = im.half() if half else im.float() # uint8 to fp16/32
im /= 255 # 0 - 255 to 0.0 - 1.0
nb, _, height, width = im.shape # batch size, channels, height, width
# Inference
with dt[1]:
preds, protos, train_out = model(im) if compute_loss else (*model(im, augment=augment)[:2], None)
# Loss
if compute_loss:
loss += compute_loss((train_out, protos), targets, masks)[1] # box, obj, cls
# NMS
targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
with dt[2]:
preds = non_max_suppression(
preds, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls, max_det=max_det, nm=nm
)
# Metrics
plot_masks = [] # masks for plotting
for si, (pred, proto) in enumerate(zip(preds, protos)):
labels = targets[targets[:, 0] == si, 1:]
nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
path, shape = Path(paths[si]), shapes[si][0]
correct_masks = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
correct_bboxes = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
seen += 1
if npr == 0:
if nl:
stats.append((correct_masks, correct_bboxes, *torch.zeros((2, 0), device=device), labels[:, 0]))
if plots:
confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
continue
# Masks
midx = [si] if overlap else targets[:, 0] == si
gt_masks = masks[midx]
pred_masks = process(proto, pred[:, 6:], pred[:, :4], shape=im[si].shape[1:])
# Predictions
if single_cls:
pred[:, 5] = 0
predn = pred.clone()
scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
# Evaluate
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
correct_bboxes = process_batch(predn, labelsn, iouv)
correct_masks = process_batch(predn, labelsn, iouv, pred_masks, gt_masks, overlap=overlap, masks=True)
if plots:
confusion_matrix.process_batch(predn, labelsn)
stats.append((correct_masks, correct_bboxes, pred[:, 4], pred[:, 5], labels[:, 0])) # (conf, pcls, tcls)
pred_masks = torch.as_tensor(pred_masks, dtype=torch.uint8)
if plots and batch_i < 3:
plot_masks.append(pred_masks[:15]) # filter top 15 to plot
# Save/log
if save_txt:
save_one_txt(predn, save_conf, shape, file=save_dir / "labels" / f"{path.stem}.txt")
if save_json:
pred_masks = scale_image(
im[si].shape[1:], pred_masks.permute(1, 2, 0).contiguous().cpu().numpy(), shape, shapes[si][1]
)
save_one_json(predn, jdict, path, class_map, pred_masks) # append to COCO-JSON dictionary
# callbacks.run('on_val_image_end', pred, predn, path, names, im[si])
# Plot images
if plots and batch_i < 3:
if len(plot_masks):
plot_masks = torch.cat(plot_masks, dim=0)
plot_images_and_masks(im, targets, masks, paths, save_dir / f"val_batch{batch_i}_labels.jpg", names)
plot_images_and_masks(
im,
output_to_target(preds, max_det=15),
plot_masks,
paths,
save_dir / f"val_batch{batch_i}_pred.jpg",
names,
) # pred
# callbacks.run('on_val_batch_end')
# Compute metrics
stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
if len(stats) and stats[0].any():
results = ap_per_class_box_and_mask(*stats, plot=plots, save_dir=save_dir, names=names)
metrics.update(results)
nt = np.bincount(stats[4].astype(int), minlength=nc) # number of targets per class
# Print results
pf = "%22s" + "%11i" * 2 + "%11.3g" * 8 # print format
LOGGER.info(pf % ("all", seen, nt.sum(), *metrics.mean_results()))
if nt.sum() == 0:
LOGGER.warning(f"WARNING ⚠️ no labels found in {task} set, can not compute metrics without labels")
# Print results per class
if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
for i, c in enumerate(metrics.ap_class_index):
LOGGER.info(pf % (names[c], seen, nt[c], *metrics.class_result(i)))
# Print speeds
t = tuple(x.t / seen * 1e3 for x in dt) # speeds per image
if not training:
shape = (batch_size, 3, imgsz, imgsz)
LOGGER.info(f"Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}" % t)
# Plots
if plots:
confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
# callbacks.run('on_val_end')
mp_bbox, mr_bbox, map50_bbox, map_bbox, mp_mask, mr_mask, map50_mask, map_mask = metrics.mean_results()
# Save JSON
if save_json and len(jdict):
w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else "" # weights
anno_json = str(Path("../datasets/coco/annotations/instances_val2017.json")) # annotations
pred_json = str(save_dir / f"{w}_predictions.json") # predictions
LOGGER.info(f"\nEvaluating pycocotools mAP... saving {pred_json}...")
with open(pred_json, "w") as f:
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
anno = COCO(anno_json) # init annotations api
pred = anno.loadRes(pred_json) # init predictions api
results = []
for eval in COCOeval(anno, pred, "bbox"), COCOeval(anno, pred, "segm"):
if is_coco:
eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # img ID to evaluate
eval.evaluate()
eval.accumulate()
eval.summarize()
results.extend(eval.stats[:2]) # update results (mAP@0.5:0.95, mAP@0.5)
map_bbox, map50_bbox, map_mask, map50_mask = results
except Exception as e:
LOGGER.info(f"pycocotools unable to run: {e}")
# Return results
model.float() # for training
if not training:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ""
LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
final_metric = mp_bbox, mr_bbox, map50_bbox, map_bbox, mp_mask, mr_mask, map50_mask, map_mask
return (*final_metric, *(loss.cpu() / len(dataloader)).tolist()), metrics.get_maps(nc), t
def parse_opt():
"""Parses command line arguments for configuring YOLOv5 options like dataset path, weights, batch size, and
inference settings.
"""
parser = argparse.ArgumentParser()
parser.add_argument("--data", type=str, default=ROOT / "data/coco128-seg.yaml", help="dataset.yaml path")
parser.add_argument("--weights", nargs="+", type=str, default=ROOT / "yolov5s-seg.pt", help="model path(s)")
parser.add_argument("--batch-size", type=int, default=32, help="batch size")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=640, help="inference size (pixels)")
parser.add_argument("--conf-thres", type=float, default=0.001, help="confidence threshold")
parser.add_argument("--iou-thres", type=float, default=0.6, help="NMS IoU threshold")
parser.add_argument("--max-det", type=int, default=300, help="maximum detections per image")
parser.add_argument("--task", default="val", help="train, val, test, speed or study")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--workers", type=int, default=8, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--single-cls", action="store_true", help="treat as single-class dataset")
parser.add_argument("--augment", action="store_true", help="augmented inference")
parser.add_argument("--verbose", action="store_true", help="report mAP by class")
parser.add_argument("--save-txt", action="store_true", help="save results to *.txt")
parser.add_argument("--save-hybrid", action="store_true", help="save label+prediction hybrid results to *.txt")
parser.add_argument("--save-conf", action="store_true", help="save confidences in --save-txt labels")
parser.add_argument("--save-json", action="store_true", help="save a COCO-JSON results file")
parser.add_argument("--project", default=ROOT / "runs/val-seg", help="save results to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--half", action="store_true", help="use FP16 half-precision inference")
parser.add_argument("--dnn", action="store_true", help="use OpenCV DNN for ONNX inference")
opt = parser.parse_args()
opt.data = check_yaml(opt.data) # check YAML
# opt.save_json |= opt.data.endswith('coco.yaml')
opt.save_txt |= opt.save_hybrid
print_args(vars(opt))
return opt
def main(opt):
"""Executes YOLOv5 tasks including training, validation, testing, speed, and study with configurable options."""
check_requirements(ROOT / "requirements.txt", exclude=("tensorboard", "thop"))
if opt.task in ("train", "val", "test"): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
LOGGER.warning(f"WARNING ⚠️ confidence threshold {opt.conf_thres} > 0.001 produces invalid results")
if opt.save_hybrid:
LOGGER.warning("WARNING ⚠️ --save-hybrid returns high mAP from hybrid labels, not from predictions alone")
run(**vars(opt))
else:
weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
opt.half = torch.cuda.is_available() and opt.device != "cpu" # FP16 for fastest results
if opt.task == "speed": # speed benchmarks
# python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
for opt.weights in weights:
run(**vars(opt), plots=False)
elif opt.task == "study": # speed vs mAP benchmarks
# python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
for opt.weights in weights:
f = f"study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt" # filename to save to
x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
for opt.imgsz in x: # img-size
LOGGER.info(f"\nRunning {f} --imgsz {opt.imgsz}...")
r, _, t = run(**vars(opt), plots=False)
y.append(r + t) # results and times
np.savetxt(f, y, fmt="%10.4g") # save
subprocess.run(["zip", "-r", "study.zip", "study_*.txt"])
plot_val_study(x=x) # plot
else:
raise NotImplementedError(f'--task {opt.task} not in ("train", "val", "test", "speed", "study")')
if __name__ == "__main__":
opt = parse_opt()
main(opt)
================================================
FILE: server.py
================================================
import pickle
import socket
import sys
import threading
import time
import traceback
import cv2
import numpy as np
import pynput
from PyQt5.QtCore import Qt
from PyQt5.QtWidgets import QApplication
from apex_recoils.core import SelectGun, ReaSnowSelectGun
from apex_recoils.core.image_comparator.NetImageComparator import NetImageComparator
from apex_recoils.core.screentaker.SocketScreenTaker import SocketScreenTaker
from apex_yolov5 import LogUtil, global_img_info
from apex_yolov5.KeyAndMouseListener import apex_mouse_listener, apex_key_listener
from apex_yolov5.auxiliary import start
from apex_yolov5.log import LogFactory
from apex_yolov5.mouse_lock import lock
from apex_yolov5.mouse_mover import MoverFactory
from apex_yolov5.socket import socket_util
from apex_yolov5.socket.config import global_config
from apex_yolov5.socket.yolov5_handler import get_aims
from apex_yolov5.windows.config_window import ConfigWindow
log_util = LogUtil.LogUtil()
def main(log_window):
# 创建一个TCP/IP套接字
server_socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
# 绑定服务器地址和端口
server_address = (global_config.listener_ip, global_config.listener_port)
server_socket.bind(server_address)
# 监听客户端连接
server_socket.listen(1)
buffer_size = global_config.buffer_size
while True:
total_size = 0
print('等待客户端连接...')
# 等待客户端连接
client_socket, client_address = server_socket.accept()
print('客户端已连接:{}'.format(client_address))
try:
print_count = 0
compute_time = time.time()
while True:
data = socket_util.recv(client_socket, buffer_size=buffer_size)
data = pickle.loads(data)
img_origin = data["img_origin"]
shot_width = data["shot_width"]
shot_height = data["shot_height"]
total_size += len(img_origin)
# 将接收到的数据转换为图像
img = np.frombuffer(img_origin, dtype='uint8')
img = img.reshape((shot_height, shot_width, 3))
img = cv2.cvtColor(img, cv2.COLOR_BGRA2BGR)
global_img_info.set_current_img_2(img_origin, img, shot_width, shot_height)
aims = get_aims(img)
bboxes = []
averager = (0, 0, 0, 0)
if len(aims):
averager = lock(aims, global_config.mouse, global_config.desktop_width,
global_config.desktop_height,
shot_width=shot_width, shot_height=shot_height) # x y 是分辨率
if global_config.is_show_debug_window:
for i, det in enumerate(aims):
tag, x_center, y_center, width, height = det
x_center, width = global_img_info.get_current_img().shot_width * float(
x_center), global_img_info.get_current_img().shot_width * float(
width)
y_center, height = global_img_info.get_current_img().shot_height * float(
y_center), global_img_info.get_current_img().shot_height * float(
height)
top_left = (int(x_center - width / 2.0), int(y_center - height / 2.0))
bottom_right = (int(x_center + width / 2.0), int(y_center + height / 2.0))
bboxes.append((tag, top_left, bottom_right))
averager_data = pickle.dumps(averager)
socket_util.send(client_socket, averager_data, buffer_size=buffer_size)
print_count += 1
now = time.time()
if now - compute_time > 1:
print("识别[{}]次,传输{:.1f}M/s".format(print_count, (1.0 * total_size / 1024 / 1024)))
log_window.add_frame_rate_plot((print_count, print_count))
total_size = 0
print_count = 0
compute_time = now
if global_config.is_show_debug_window:
log_window.set_image(img, bboxes=bboxes)
except Exception as e:
print(e)
traceback.print_exc()
pass
finally:
# 关闭连接
try:
client_socket.close()
except:
pass
# main()
if __name__ == "__main__":
app = QApplication(sys.argv)
LogFactory.init_logger()
SelectGun.select_gun = SelectGun.SelectGun(bbox=global_config.select_gun_bbox,
image_path=global_config.image_path,
scope_bbox=global_config.select_scope_bbox,
scope_path=global_config.scope_path,
refresh_buttons=global_config.refresh_button,
has_turbocharger=global_config.has_turbocharger,
hop_up_bbox=global_config.select_hop_up_bbox,
hop_up_path=global_config.hop_up_path,
image_comparator=NetImageComparator(global_config.image_base_path),
screen_taker=SocketScreenTaker(LogFactory.logger(), (
global_config.distributed_param["ip"],
global_config.distributed_param["port"])))
rea_snow_select_gun = ReaSnowSelectGun.ReaSnowSelectGun()
SelectGun.get_select_gun().connect(rea_snow_select_gun.trigger_button)
listener = pynput.mouse.Listener(
on_click=apex_mouse_listener.on_click)
listener.start()
key_listener = pynput.keyboard.Listener(
on_press=apex_key_listener.on_press, on_release=apex_key_listener.on_release
)
key_listener.start()
threading.Thread(target=start).start()
MoverFactory.init_mover(
mouse_model=global_config.mouse_model,
mouse_mover_params=global_config.available_mouse_models)
log_window = ConfigWindow(global_config, "服务端")
log_window.show()
if global_config.is_show_debug_window:
log_window.setWindowFlags(Qt.WindowStaysOnTopHint)
log_window.show()
threading.Thread(target=main, args=(log_window,)).start()
sys.exit(app.exec_())
================================================
FILE: server.spec
================================================
# -*- mode: python ; coding: utf-8 -*-
block_cipher = None
pathex = [
'C:/Users/Administrator/PycharmProjects/yolov5'
]
hiddenimports = ['models.yolo',
'utils',
'utils.general',
'models',
'utils.aws',
'utils.docker',
'utils.flask_rest_api',
'utils.google_app_engine',
'utils.loggers',
'utils.segment',
'utils.loggers.clearml',
'utils.loggers.comet',
'utils.loggers.wandb',
'utils.segment',
'models.hub',
'segment',
'apex_yolov5',
'apex_yolov5.socket'
]
a = Analysis(
['server.py'],
pathex=pathex,
binaries=[(r'./utils/general.pyc',r'./utils')],
datas=[(r'./config/global_config.json',r'./config')],
hiddenimports=['models.yolo'],
hookspath=[],
hooksconfig={},
runtime_hooks=['setenv.py'],
excludes=[],
win_no_prefer_redirects=False,
win_private_assemblies=False,
cipher=block_cipher,
noarchive=False,
)
pyz = PYZ(a.pure, a.zipped_data, cipher=block_cipher)
exe = EXE(
pyz,
a.scripts,
[],
exclude_binaries=True,
name='server',
debug=False,
bootloader_ignore_signals=False,
strip=False,
upx=True,
console=True,
disable_windowed_traceback=False,
argv_emulation=False,
target_arch=None,
codesign_identity=None,
entitlements_file=None,
icon='./images/ag.ico'
)
coll = COLLECT(
exe,
a.binaries,
a.zipfiles,
a.datas,
strip=False,
upx=True,
upx_exclude=[],
name='server'
)
================================================
FILE: setenv.py
================================================
import os
print("配置cuda环境变量:CUDA_MODULE_LOADING=LAZY")
os.environ["CUDA_MODULE_LOADING"] = "LAZY"
os.environ["VALIDATE_TYPE"] = "ai"
================================================
FILE: setup.py
================================================
from distutils.core import setup
from Cython.Build import cythonize
setup(
name='yolov5 app',
ext_modules=cythonize(module_list="**.py", exclude='**/__init__.py'),
)
================================================
FILE: setup_check.py
================================================
from distutils.core import setup
from Cython.Build import cythonize
setup(
name='check_run',
ext_modules=cythonize('apex_yolov5/check_run.py'),
py_modules=[]
)
================================================
FILE: train.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""
Train a YOLOv5 model on a custom dataset. Models and datasets download automatically from the latest YOLOv5 release.
Usage - Single-GPU training:
$ python train.py --data coco128.yaml --weights yolov5s.pt --img 640 # from pretrained (recommended)
$ python train.py --data coco128.yaml --weights '' --cfg yolov5s.yaml --img 640 # from scratch
Usage - Multi-GPU DDP training:
$ python -m torch.distributed.run --nproc_per_node 4 --master_port 1 train.py --data coco128.yaml --weights yolov5s.pt --img 640 --device 0,1,2,3
Models: https://github.com/ultralytics/yolov5/tree/master/models
Datasets: https://github.com/ultralytics/yolov5/tree/master/data
Tutorial: https://docs.ultralytics.com/yolov5/tutorials/train_custom_data
"""
import argparse
import math
import os
import random
import subprocess
import sys
import time
from copy import deepcopy
from datetime import datetime, timedelta
from pathlib import Path
try:
import comet_ml # must be imported before torch (if installed)
except ImportError:
comet_ml = None
import numpy as np
import torch
import torch.distributed as dist
import torch.nn as nn
import yaml
from torch.optim import lr_scheduler
from tqdm import tqdm
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
import val as validate # for end-of-epoch mAP
from models.experimental import attempt_load
from models.yolo import Model
from utils.autoanchor import check_anchors
from utils.autobatch import check_train_batch_size
from utils.callbacks import Callbacks
from utils.dataloaders import create_dataloader
from utils.downloads import attempt_download, is_url
from utils.general import (
LOGGER,
TQDM_BAR_FORMAT,
check_amp,
check_dataset,
check_file,
check_git_info,
check_git_status,
check_img_size,
check_requirements,
check_suffix,
check_yaml,
colorstr,
get_latest_run,
increment_path,
init_seeds,
intersect_dicts,
labels_to_class_weights,
labels_to_image_weights,
methods,
one_cycle,
print_args,
print_mutation,
strip_optimizer,
yaml_save,
)
from utils.loggers import LOGGERS, Loggers
from utils.loggers.comet.comet_utils import check_comet_resume
from utils.loss import ComputeLoss
from utils.metrics import fitness
from utils.plots import plot_evolve
from utils.torch_utils import (
EarlyStopping,
ModelEMA,
de_parallel,
select_device,
smart_DDP,
smart_optimizer,
smart_resume,
torch_distributed_zero_first,
)
LOCAL_RANK = int(os.getenv("LOCAL_RANK", -1)) # https://pytorch.org/docs/stable/elastic/run.html
RANK = int(os.getenv("RANK", -1))
WORLD_SIZE = int(os.getenv("WORLD_SIZE", 1))
GIT_INFO = check_git_info()
def train(hyp, opt, device, callbacks):
"""
Trains YOLOv5 model with given hyperparameters, options, and device, managing datasets, model architecture, loss
computation, and optimizer steps.
`hyp` argument is path/to/hyp.yaml or hyp dictionary.
"""
save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze = (
Path(opt.save_dir),
opt.epochs,
opt.batch_size,
opt.weights,
opt.single_cls,
opt.evolve,
opt.data,
opt.cfg,
opt.resume,
opt.noval,
opt.nosave,
opt.workers,
opt.freeze,
)
callbacks.run("on_pretrain_routine_start")
# Directories
w = save_dir / "weights" # weights dir
(w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
last, best = w / "last.pt", w / "best.pt"
# Hyperparameters
if isinstance(hyp, str):
with open(hyp, errors="ignore") as f:
hyp = yaml.safe_load(f) # load hyps dict
LOGGER.info(colorstr("hyperparameters: ") + ", ".join(f"{k}={v}" for k, v in hyp.items()))
opt.hyp = hyp.copy() # for saving hyps to checkpoints
# Save run settings
if not evolve:
yaml_save(save_dir / "hyp.yaml", hyp)
yaml_save(save_dir / "opt.yaml", vars(opt))
# Loggers
data_dict = None
if RANK in {-1, 0}:
include_loggers = list(LOGGERS)
if getattr(opt, "ndjson_console", False):
include_loggers.append("ndjson_console")
if getattr(opt, "ndjson_file", False):
include_loggers.append("ndjson_file")
loggers = Loggers(
save_dir=save_dir,
weights=weights,
opt=opt,
hyp=hyp,
logger=LOGGER,
include=tuple(include_loggers),
)
# Register actions
for k in methods(loggers):
callbacks.register_action(k, callback=getattr(loggers, k))
# Process custom dataset artifact link
data_dict = loggers.remote_dataset
if resume: # If resuming runs from remote artifact
weights, epochs, hyp, batch_size = opt.weights, opt.epochs, opt.hyp, opt.batch_size
# Config
plots = not evolve and not opt.noplots # create plots
cuda = device.type != "cpu"
init_seeds(opt.seed + 1 + RANK, deterministic=True)
with torch_distributed_zero_first(LOCAL_RANK):
data_dict = data_dict or check_dataset(data) # check if None
train_path, val_path = data_dict["train"], data_dict["val"]
nc = 1 if single_cls else int(data_dict["nc"]) # number of classes
names = {0: "item"} if single_cls and len(data_dict["names"]) != 1 else data_dict["names"] # class names
is_coco = isinstance(val_path, str) and val_path.endswith("coco/val2017.txt") # COCO dataset
# Model
check_suffix(weights, ".pt") # check weights
pretrained = weights.endswith(".pt")
if pretrained:
with torch_distributed_zero_first(LOCAL_RANK):
weights = attempt_download(weights) # download if not found locally
ckpt = torch.load(weights, map_location="cpu") # load checkpoint to CPU to avoid CUDA memory leak
model = Model(cfg or ckpt["model"].yaml, ch=3, nc=nc, anchors=hyp.get("anchors")).to(device) # create
exclude = ["anchor"] if (cfg or hyp.get("anchors")) and not resume else [] # exclude keys
csd = ckpt["model"].float().state_dict() # checkpoint state_dict as FP32
csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
model.load_state_dict(csd, strict=False) # load
LOGGER.info(f"Transferred {len(csd)}/{len(model.state_dict())} items from {weights}") # report
else:
model = Model(cfg, ch=3, nc=nc, anchors=hyp.get("anchors")).to(device) # create
amp = check_amp(model) # check AMP
# Freeze
freeze = [f"model.{x}." for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
for k, v in model.named_parameters():
v.requires_grad = True # train all layers
# v.register_hook(lambda x: torch.nan_to_num(x)) # NaN to 0 (commented for erratic training results)
if any(x in k for x in freeze):
LOGGER.info(f"freezing {k}")
v.requires_grad = False
# Image size
gs = max(int(model.stride.max()), 32) # grid size (max stride)
imgsz = check_img_size(opt.imgsz, gs, floor=gs * 2) # verify imgsz is gs-multiple
# Batch size
if RANK == -1 and batch_size == -1: # single-GPU only, estimate best batch size
batch_size = check_train_batch_size(model, imgsz, amp)
loggers.on_params_update({"batch_size": batch_size})
# Optimizer
nbs = 64 # nominal batch size
accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing
hyp["weight_decay"] *= batch_size * accumulate / nbs # scale weight_decay
optimizer = smart_optimizer(model, opt.optimizer, hyp["lr0"], hyp["momentum"], hyp["weight_decay"])
# Scheduler
if opt.cos_lr:
lf = one_cycle(1, hyp["lrf"], epochs) # cosine 1->hyp['lrf']
else:
lf = lambda x: (1 - x / epochs) * (1.0 - hyp["lrf"]) + hyp["lrf"] # linear
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
# EMA
ema = ModelEMA(model) if RANK in {-1, 0} else None
# Resume
best_fitness, start_epoch = 0.0, 0
if pretrained:
if resume:
best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume)
del ckpt, csd
# DP mode
if cuda and RANK == -1 and torch.cuda.device_count() > 1:
LOGGER.warning(
"WARNING ⚠️ DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n"
"See Multi-GPU Tutorial at https://docs.ultralytics.com/yolov5/tutorials/multi_gpu_training to get started."
)
model = torch.nn.DataParallel(model)
# SyncBatchNorm
if opt.sync_bn and cuda and RANK != -1:
model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
LOGGER.info("Using SyncBatchNorm()")
# Trainloader
train_loader, dataset = create_dataloader(
train_path,
imgsz,
batch_size // WORLD_SIZE,
gs,
single_cls,
hyp=hyp,
augment=True,
cache=None if opt.cache == "val" else opt.cache,
rect=opt.rect,
rank=LOCAL_RANK,
workers=workers,
image_weights=opt.image_weights,
quad=opt.quad,
prefix=colorstr("train: "),
shuffle=True,
seed=opt.seed,
)
labels = np.concatenate(dataset.labels, 0)
mlc = int(labels[:, 0].max()) # max label class
assert mlc < nc, f"Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}"
# Process 0
if RANK in {-1, 0}:
val_loader = create_dataloader(
val_path,
imgsz,
batch_size // WORLD_SIZE * 2,
gs,
single_cls,
hyp=hyp,
cache=None if noval else opt.cache,
rect=True,
rank=-1,
workers=workers * 2,
pad=0.5,
prefix=colorstr("val: "),
)[0]
if not resume:
if not opt.noautoanchor:
check_anchors(dataset, model=model, thr=hyp["anchor_t"], imgsz=imgsz) # run AutoAnchor
model.half().float() # pre-reduce anchor precision
callbacks.run("on_pretrain_routine_end", labels, names)
# DDP mode
if cuda and RANK != -1:
model = smart_DDP(model)
# Model attributes
nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps)
hyp["box"] *= 3 / nl # scale to layers
hyp["cls"] *= nc / 80 * 3 / nl # scale to classes and layers
hyp["obj"] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers
hyp["label_smoothing"] = opt.label_smoothing
model.nc = nc # attach number of classes to model
model.hyp = hyp # attach hyperparameters to model
model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights
model.names = names
# Start training
t0 = time.time()
nb = len(train_loader) # number of batches
nw = max(round(hyp["warmup_epochs"] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
# nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
last_opt_step = -1
maps = np.zeros(nc) # mAP per class
results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
scheduler.last_epoch = start_epoch - 1 # do not move
scaler = torch.cuda.amp.GradScaler(enabled=amp)
stopper, stop = EarlyStopping(patience=opt.patience), False
compute_loss = ComputeLoss(model) # init loss class
callbacks.run("on_train_start")
LOGGER.info(
f'Image sizes {imgsz} train, {imgsz} val\n'
f'Using {train_loader.num_workers * WORLD_SIZE} dataloader workers\n'
f"Logging results to {colorstr('bold', save_dir)}\n"
f'Starting training for {epochs} epochs...'
)
for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
callbacks.run("on_train_epoch_start")
model.train()
# Update image weights (optional, single-GPU only)
if opt.image_weights:
cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
# Update mosaic border (optional)
# b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
# dataset.mosaic_border = [b - imgsz, -b] # height, width borders
mloss = torch.zeros(3, device=device) # mean losses
if RANK != -1:
train_loader.sampler.set_epoch(epoch)
pbar = enumerate(train_loader)
LOGGER.info(("\n" + "%11s" * 7) % ("Epoch", "GPU_mem", "box_loss", "obj_loss", "cls_loss", "Instances", "Size"))
if RANK in {-1, 0}:
pbar = tqdm(pbar, total=nb, bar_format=TQDM_BAR_FORMAT) # progress bar
optimizer.zero_grad()
for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
callbacks.run("on_train_batch_start")
ni = i + nb * epoch # number integrated batches (since train start)
imgs = imgs.to(device, non_blocking=True).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
# Warmup
if ni <= nw:
xi = [0, nw] # x interp
# compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
for j, x in enumerate(optimizer.param_groups):
# bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
x["lr"] = np.interp(ni, xi, [hyp["warmup_bias_lr"] if j == 0 else 0.0, x["initial_lr"] * lf(epoch)])
if "momentum" in x:
x["momentum"] = np.interp(ni, xi, [hyp["warmup_momentum"], hyp["momentum"]])
# Multi-scale
if opt.multi_scale:
sz = random.randrange(int(imgsz * 0.5), int(imgsz * 1.5) + gs) // gs * gs # size
sf = sz / max(imgs.shape[2:]) # scale factor
if sf != 1:
ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
imgs = nn.functional.interpolate(imgs, size=ns, mode="bilinear", align_corners=False)
# Forward
with torch.cuda.amp.autocast(amp):
pred = model(imgs) # forward
loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
if RANK != -1:
loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
if opt.quad:
loss *= 4.0
# Backward
scaler.scale(loss).backward()
# Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
if ni - last_opt_step >= accumulate:
scaler.unscale_(optimizer) # unscale gradients
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0) # clip gradients
scaler.step(optimizer) # optimizer.step
scaler.update()
optimizer.zero_grad()
if ema:
ema.update(model)
last_opt_step = ni
# Log
if RANK in {-1, 0}:
mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
mem = f"{torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0:.3g}G" # (GB)
pbar.set_description(
("%11s" * 2 + "%11.4g" * 5)
% (f"{epoch}/{epochs - 1}", mem, *mloss, targets.shape[0], imgs.shape[-1])
)
callbacks.run("on_train_batch_end", model, ni, imgs, targets, paths, list(mloss))
if callbacks.stop_training:
return
# end batch ------------------------------------------------------------------------------------------------
# Scheduler
lr = [x["lr"] for x in optimizer.param_groups] # for loggers
scheduler.step()
if RANK in {-1, 0}:
# mAP
callbacks.run("on_train_epoch_end", epoch=epoch)
ema.update_attr(model, include=["yaml", "nc", "hyp", "names", "stride", "class_weights"])
final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
if not noval or final_epoch: # Calculate mAP
results, maps, _ = validate.run(
data_dict,
batch_size=batch_size // WORLD_SIZE * 2,
imgsz=imgsz,
half=amp,
model=ema.ema,
single_cls=single_cls,
dataloader=val_loader,
save_dir=save_dir,
plots=False,
callbacks=callbacks,
compute_loss=compute_loss,
)
# Update best mAP
fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
stop = stopper(epoch=epoch, fitness=fi) # early stop check
if fi > best_fitness:
best_fitness = fi
log_vals = list(mloss) + list(results) + lr
callbacks.run("on_fit_epoch_end", log_vals, epoch, best_fitness, fi)
# Save model
if (not nosave) or (final_epoch and not evolve): # if save
ckpt = {
"epoch": epoch,
"best_fitness": best_fitness,
"model": deepcopy(de_parallel(model)).half(),
"ema": deepcopy(ema.ema).half(),
"updates": ema.updates,
"optimizer": optimizer.state_dict(),
"opt": vars(opt),
"git": GIT_INFO, # {remote, branch, commit} if a git repo
"date": datetime.now().isoformat(),
}
# Save last, best and delete
torch.save(ckpt, last)
if best_fitness == fi:
torch.save(ckpt, best)
if opt.save_period > 0 and epoch % opt.save_period == 0:
torch.save(ckpt, w / f"epoch{epoch}.pt")
del ckpt
callbacks.run("on_model_save", last, epoch, final_epoch, best_fitness, fi)
# EarlyStopping
if RANK != -1: # if DDP training
broadcast_list = [stop if RANK == 0 else None]
dist.broadcast_object_list(broadcast_list, 0) # broadcast 'stop' to all ranks
if RANK != 0:
stop = broadcast_list[0]
if stop:
break # must break all DDP ranks
# end epoch ----------------------------------------------------------------------------------------------------
# end training -----------------------------------------------------------------------------------------------------
if RANK in {-1, 0}:
LOGGER.info(f"\n{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours.")
for f in last, best:
if f.exists():
strip_optimizer(f) # strip optimizers
if f is best:
LOGGER.info(f"\nValidating {f}...")
results, _, _ = validate.run(
data_dict,
batch_size=batch_size // WORLD_SIZE * 2,
imgsz=imgsz,
model=attempt_load(f, device).half(),
iou_thres=0.65 if is_coco else 0.60, # best pycocotools at iou 0.65
single_cls=single_cls,
dataloader=val_loader,
save_dir=save_dir,
save_json=is_coco,
verbose=True,
plots=plots,
callbacks=callbacks,
compute_loss=compute_loss,
) # val best model with plots
if is_coco:
callbacks.run("on_fit_epoch_end", list(mloss) + list(results) + lr, epoch, best_fitness, fi)
callbacks.run("on_train_end", last, best, epoch, results)
torch.cuda.empty_cache()
return results
def parse_opt(known=False):
"""Parses command-line arguments for YOLOv5 training, validation, and testing."""
parser = argparse.ArgumentParser()
parser.add_argument("--weights", type=str, default=ROOT / "yolov5s.pt", help="initial weights path")
parser.add_argument("--cfg", type=str, default="", help="model.yaml path")
parser.add_argument("--data", type=str, default=ROOT / "data/coco128.yaml", help="dataset.yaml path")
parser.add_argument("--hyp", type=str, default=ROOT / "data/hyps/hyp.scratch-low.yaml", help="hyperparameters path")
parser.add_argument("--epochs", type=int, default=100, help="total training epochs")
parser.add_argument("--batch-size", type=int, default=16, help="total batch size for all GPUs, -1 for autobatch")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=640, help="train, val image size (pixels)")
parser.add_argument("--rect", action="store_true", help="rectangular training")
parser.add_argument("--resume", nargs="?", const=True, default=False, help="resume most recent training")
parser.add_argument("--nosave", action="store_true", help="only save final checkpoint")
parser.add_argument("--noval", action="store_true", help="only validate final epoch")
parser.add_argument("--noautoanchor", action="store_true", help="disable AutoAnchor")
parser.add_argument("--noplots", action="store_true", help="save no plot files")
parser.add_argument("--evolve", type=int, nargs="?", const=300, help="evolve hyperparameters for x generations")
parser.add_argument(
"--evolve_population", type=str, default=ROOT / "data/hyps", help="location for loading population"
)
parser.add_argument("--resume_evolve", type=str, default=None, help="resume evolve from last generation")
parser.add_argument("--bucket", type=str, default="", help="gsutil bucket")
parser.add_argument("--cache", type=str, nargs="?", const="ram", help="image --cache ram/disk")
parser.add_argument("--image-weights", action="store_true", help="use weighted image selection for training")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--multi-scale", action="store_true", help="vary img-size +/- 50%%")
parser.add_argument("--single-cls", action="store_true", help="train multi-class data as single-class")
parser.add_argument("--optimizer", type=str, choices=["SGD", "Adam", "AdamW"], default="SGD", help="optimizer")
parser.add_argument("--sync-bn", action="store_true", help="use SyncBatchNorm, only available in DDP mode")
parser.add_argument("--workers", type=int, default=8, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--project", default=ROOT / "runs/train", help="save to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--quad", action="store_true", help="quad dataloader")
parser.add_argument("--cos-lr", action="store_true", help="cosine LR scheduler")
parser.add_argument("--label-smoothing", type=float, default=0.0, help="Label smoothing epsilon")
parser.add_argument("--patience", type=int, default=100, help="EarlyStopping patience (epochs without improvement)")
parser.add_argument("--freeze", nargs="+", type=int, default=[0], help="Freeze layers: backbone=10, first3=0 1 2")
parser.add_argument("--save-period", type=int, default=-1, help="Save checkpoint every x epochs (disabled if < 1)")
parser.add_argument("--seed", type=int, default=0, help="Global training seed")
parser.add_argument("--local_rank", type=int, default=-1, help="Automatic DDP Multi-GPU argument, do not modify")
# Logger arguments
parser.add_argument("--entity", default=None, help="Entity")
parser.add_argument("--upload_dataset", nargs="?", const=True, default=False, help='Upload data, "val" option')
parser.add_argument("--bbox_interval", type=int, default=-1, help="Set bounding-box image logging interval")
parser.add_argument("--artifact_alias", type=str, default="latest", help="Version of dataset artifact to use")
# NDJSON logging
parser.add_argument("--ndjson-console", action="store_true", help="Log ndjson to console")
parser.add_argument("--ndjson-file", action="store_true", help="Log ndjson to file")
return parser.parse_known_args()[0] if known else parser.parse_args()
def main(opt, callbacks=Callbacks()):
"""Runs training or hyperparameter evolution with specified options and optional callbacks."""
if RANK in {-1, 0}:
print_args(vars(opt))
check_git_status()
check_requirements(ROOT / "requirements.txt")
# Resume (from specified or most recent last.pt)
if opt.resume and not check_comet_resume(opt) and not opt.evolve:
last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
opt_yaml = last.parent.parent / "opt.yaml" # train options yaml
opt_data = opt.data # original dataset
if opt_yaml.is_file():
with open(opt_yaml, errors="ignore") as f:
d = yaml.safe_load(f)
else:
d = torch.load(last, map_location="cpu")["opt"]
opt = argparse.Namespace(**d) # replace
opt.cfg, opt.weights, opt.resume = "", str(last), True # reinstate
if is_url(opt_data):
opt.data = check_file(opt_data) # avoid HUB resume auth timeout
else:
opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = (
check_file(opt.data),
check_yaml(opt.cfg),
check_yaml(opt.hyp),
str(opt.weights),
str(opt.project),
) # checks
assert len(opt.cfg) or len(opt.weights), "either --cfg or --weights must be specified"
if opt.evolve:
if opt.project == str(ROOT / "runs/train"): # if default project name, rename to runs/evolve
opt.project = str(ROOT / "runs/evolve")
opt.exist_ok, opt.resume = opt.resume, False # pass resume to exist_ok and disable resume
if opt.name == "cfg":
opt.name = Path(opt.cfg).stem # use model.yaml as name
opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
# DDP mode
device = select_device(opt.device, batch_size=opt.batch_size)
if LOCAL_RANK != -1:
msg = "is not compatible with YOLOv5 Multi-GPU DDP training"
assert not opt.image_weights, f"--image-weights {msg}"
assert not opt.evolve, f"--evolve {msg}"
assert opt.batch_size != -1, f"AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size"
assert opt.batch_size % WORLD_SIZE == 0, f"--batch-size {opt.batch_size} must be multiple of WORLD_SIZE"
assert torch.cuda.device_count() > LOCAL_RANK, "insufficient CUDA devices for DDP command"
torch.cuda.set_device(LOCAL_RANK)
device = torch.device("cuda", LOCAL_RANK)
dist.init_process_group(
backend="nccl" if dist.is_nccl_available() else "gloo", timeout=timedelta(seconds=10800)
)
# Train
if not opt.evolve:
train(opt.hyp, opt, device, callbacks)
# Evolve hyperparameters (optional)
else:
# Hyperparameter evolution metadata (including this hyperparameter True-False, lower_limit, upper_limit)
meta = {
"lr0": (False, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
"lrf": (False, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
"momentum": (False, 0.6, 0.98), # SGD momentum/Adam beta1
"weight_decay": (False, 0.0, 0.001), # optimizer weight decay
"warmup_epochs": (False, 0.0, 5.0), # warmup epochs (fractions ok)
"warmup_momentum": (False, 0.0, 0.95), # warmup initial momentum
"warmup_bias_lr": (False, 0.0, 0.2), # warmup initial bias lr
"box": (False, 0.02, 0.2), # box loss gain
"cls": (False, 0.2, 4.0), # cls loss gain
"cls_pw": (False, 0.5, 2.0), # cls BCELoss positive_weight
"obj": (False, 0.2, 4.0), # obj loss gain (scale with pixels)
"obj_pw": (False, 0.5, 2.0), # obj BCELoss positive_weight
"iou_t": (False, 0.1, 0.7), # IoU training threshold
"anchor_t": (False, 2.0, 8.0), # anchor-multiple threshold
"anchors": (False, 2.0, 10.0), # anchors per output grid (0 to ignore)
"fl_gamma": (False, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
"hsv_h": (True, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
"hsv_s": (True, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
"hsv_v": (True, 0.0, 0.9), # image HSV-Value augmentation (fraction)
"degrees": (True, 0.0, 45.0), # image rotation (+/- deg)
"translate": (True, 0.0, 0.9), # image translation (+/- fraction)
"scale": (True, 0.0, 0.9), # image scale (+/- gain)
"shear": (True, 0.0, 10.0), # image shear (+/- deg)
"perspective": (True, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
"flipud": (True, 0.0, 1.0), # image flip up-down (probability)
"fliplr": (True, 0.0, 1.0), # image flip left-right (probability)
"mosaic": (True, 0.0, 1.0), # image mixup (probability)
"mixup": (True, 0.0, 1.0), # image mixup (probability)
"copy_paste": (True, 0.0, 1.0),
} # segment copy-paste (probability)
# GA configs
pop_size = 50
mutation_rate_min = 0.01
mutation_rate_max = 0.5
crossover_rate_min = 0.5
crossover_rate_max = 1
min_elite_size = 2
max_elite_size = 5
tournament_size_min = 2
tournament_size_max = 10
with open(opt.hyp, errors="ignore") as f:
hyp = yaml.safe_load(f) # load hyps dict
if "anchors" not in hyp: # anchors commented in hyp.yaml
hyp["anchors"] = 3
if opt.noautoanchor:
del hyp["anchors"], meta["anchors"]
opt.noval, opt.nosave, save_dir = True, True, Path(opt.save_dir) # only val/save final epoch
# ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
evolve_yaml, evolve_csv = save_dir / "hyp_evolve.yaml", save_dir / "evolve.csv"
if opt.bucket:
# download evolve.csv if exists
subprocess.run(
[
"gsutil",
"cp",
f"gs://{opt.bucket}/evolve.csv",
str(evolve_csv),
]
)
# Delete the items in meta dictionary whose first value is False
del_ = [item for item, value_ in meta.items() if value_[0] is False]
hyp_GA = hyp.copy() # Make a copy of hyp dictionary
for item in del_:
del meta[item] # Remove the item from meta dictionary
del hyp_GA[item] # Remove the item from hyp_GA dictionary
# Set lower_limit and upper_limit arrays to hold the search space boundaries
lower_limit = np.array([meta[k][1] for k in hyp_GA.keys()])
upper_limit = np.array([meta[k][2] for k in hyp_GA.keys()])
# Create gene_ranges list to hold the range of values for each gene in the population
gene_ranges = [(lower_limit[i], upper_limit[i]) for i in range(len(upper_limit))]
# Initialize the population with initial_values or random values
initial_values = []
# If resuming evolution from a previous checkpoint
if opt.resume_evolve is not None:
assert os.path.isfile(ROOT / opt.resume_evolve), "evolve population path is wrong!"
with open(ROOT / opt.resume_evolve, errors="ignore") as f:
evolve_population = yaml.safe_load(f)
for value in evolve_population.values():
value = np.array([value[k] for k in hyp_GA.keys()])
initial_values.append(list(value))
# If not resuming from a previous checkpoint, generate initial values from .yaml files in opt.evolve_population
else:
yaml_files = [f for f in os.listdir(opt.evolve_population) if f.endswith(".yaml")]
for file_name in yaml_files:
with open(os.path.join(opt.evolve_population, file_name)) as yaml_file:
value = yaml.safe_load(yaml_file)
value = np.array([value[k] for k in hyp_GA.keys()])
initial_values.append(list(value))
# Generate random values within the search space for the rest of the population
if initial_values is None:
population = [generate_individual(gene_ranges, len(hyp_GA)) for _ in range(pop_size)]
elif pop_size > 1:
population = [generate_individual(gene_ranges, len(hyp_GA)) for _ in range(pop_size - len(initial_values))]
for initial_value in initial_values:
population = [initial_value] + population
# Run the genetic algorithm for a fixed number of generations
list_keys = list(hyp_GA.keys())
for generation in range(opt.evolve):
if generation >= 1:
save_dict = {}
for i in range(len(population)):
little_dict = {list_keys[j]: float(population[i][j]) for j in range(len(population[i]))}
save_dict[f"gen{str(generation)}number{str(i)}"] = little_dict
with open(save_dir / "evolve_population.yaml", "w") as outfile:
yaml.dump(save_dict, outfile, default_flow_style=False)
# Adaptive elite size
elite_size = min_elite_size + int((max_elite_size - min_elite_size) * (generation / opt.evolve))
# Evaluate the fitness of each individual in the population
fitness_scores = []
for individual in population:
for key, value in zip(hyp_GA.keys(), individual):
hyp_GA[key] = value
hyp.update(hyp_GA)
results = train(hyp.copy(), opt, device, callbacks)
callbacks = Callbacks()
# Write mutation results
keys = (
"metrics/precision",
"metrics/recall",
"metrics/mAP_0.5",
"metrics/mAP_0.5:0.95",
"val/box_loss",
"val/obj_loss",
"val/cls_loss",
)
print_mutation(keys, results, hyp.copy(), save_dir, opt.bucket)
fitness_scores.append(results[2])
# Select the fittest individuals for reproduction using adaptive tournament selection
selected_indices = []
for _ in range(pop_size - elite_size):
# Adaptive tournament size
tournament_size = max(
max(2, tournament_size_min),
int(min(tournament_size_max, pop_size) - (generation / (opt.evolve / 10))),
)
# Perform tournament selection to choose the best individual
tournament_indices = random.sample(range(pop_size), tournament_size)
tournament_fitness = [fitness_scores[j] for j in tournament_indices]
winner_index = tournament_indices[tournament_fitness.index(max(tournament_fitness))]
selected_indices.append(winner_index)
# Add the elite individuals to the selected indices
elite_indices = [i for i in range(pop_size) if fitness_scores[i] in sorted(fitness_scores)[-elite_size:]]
selected_indices.extend(elite_indices)
# Create the next generation through crossover and mutation
next_generation = []
for _ in range(pop_size):
parent1_index = selected_indices[random.randint(0, pop_size - 1)]
parent2_index = selected_indices[random.randint(0, pop_size - 1)]
# Adaptive crossover rate
crossover_rate = max(
crossover_rate_min, min(crossover_rate_max, crossover_rate_max - (generation / opt.evolve))
)
if random.uniform(0, 1) < crossover_rate:
crossover_point = random.randint(1, len(hyp_GA) - 1)
child = population[parent1_index][:crossover_point] + population[parent2_index][crossover_point:]
else:
child = population[parent1_index]
# Adaptive mutation rate
mutation_rate = max(
mutation_rate_min, min(mutation_rate_max, mutation_rate_max - (generation / opt.evolve))
)
for j in range(len(hyp_GA)):
if random.uniform(0, 1) < mutation_rate:
child[j] += random.uniform(-0.1, 0.1)
child[j] = min(max(child[j], gene_ranges[j][0]), gene_ranges[j][1])
next_generation.append(child)
# Replace the old population with the new generation
population = next_generation
# Print the best solution found
best_index = fitness_scores.index(max(fitness_scores))
best_individual = population[best_index]
print("Best solution found:", best_individual)
# Plot results
plot_evolve(evolve_csv)
LOGGER.info(
f'Hyperparameter evolution finished {opt.evolve} generations\n'
f"Results saved to {colorstr('bold', save_dir)}\n"
f'Usage example: $ python train.py --hyp {evolve_yaml}'
)
def generate_individual(input_ranges, individual_length):
"""Generates a list of random values within specified input ranges for each gene in the individual."""
individual = []
for i in range(individual_length):
lower_bound, upper_bound = input_ranges[i]
individual.append(random.uniform(lower_bound, upper_bound))
return individual
def run(**kwargs):
"""
Executes YOLOv5 training with given options, overriding with any kwargs provided.
Example: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m.pt')
"""
opt = parse_opt(True)
for k, v in kwargs.items():
setattr(opt, k, v)
main(opt)
return opt
if __name__ == "__main__":
opt = parse_opt()
main(opt)
================================================
FILE: trt.spec
================================================
# -*- mode: python ; coding: utf-8 -*-
block_cipher = None
pathex = [
'C:/Users/Administrator/PycharmProjects/yolov5'
]
a = Analysis(
['export.py'],
pathex=pathex,
binaries=[(r'./utils/general.pyc',r'./utils')],
datas=[(r'./apex_model/1w2/best.pt',r'./apex_model/1w2'),(r'./apex_model/1w2/1w.yaml',r'./apex_model/1w2'),(r'./config/export_config.json',r'./config')],
hiddenimports=['models.yolo','wmi'],
hookspath=[],
hooksconfig={},
runtime_hooks=[],
excludes=[],
win_no_prefer_redirects=False,
win_private_assemblies=False,
cipher=block_cipher,
noarchive=False,
)
pyz = PYZ(a.pure, a.zipped_data, cipher=block_cipher)
exe = EXE(
pyz,
a.scripts,
[],
exclude_binaries=True,
name='trt',
debug=False,
bootloader_ignore_signals=False,
strip=False,
upx=True,
console=True,
disable_windowed_traceback=False,
argv_emulation=False,
target_arch=None,
codesign_identity=None,
entitlements_file=None,
icon='./images/ag.ico'
)
coll = COLLECT(
exe,
a.binaries,
a.zipfiles,
a.datas,
strip=False,
upx=True,
upx_exclude=[],
name='trt'
)
================================================
FILE: tutorial.ipynb
================================================
{
"nbformat": 4,
"nbformat_minor": 0,
"metadata": {
"colab": {
"name": "YOLOv5 Tutorial",
"provenance": []
},
"kernelspec": {
"name": "python3",
"display_name": "Python 3"
},
"accelerator": "GPU"
},
"cells": [
{
"cell_type": "markdown",
"metadata": {
"id": "t6MPjfT5NrKQ"
},
"source": [
"\n",
"\n",
"[中文](https://docs.ultralytics.com/zh/) | [한국어](https://docs.ultralytics.com/ko/) | [日本語](https://docs.ultralytics.com/ja/) | [Русский](https://docs.ultralytics.com/ru/) | [Deutsch](https://docs.ultralytics.com/de/) | [Français](https://docs.ultralytics.com/fr/) | [Español](https://docs.ultralytics.com/es/) | [Português](https://docs.ultralytics.com/pt/) | [हिन्दी](https://docs.ultralytics.com/hi/) | [العربية](https://docs.ultralytics.com/ar/)\n",
"\n",
" \n",
"\n",
"This YOLOv5 🚀 notebook by Ultralytics presents simple train, validate and predict examples to help start your AI adventure. "
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "0eq1SMWl6Sfn"
},
"source": [
"# 2. Validate\n",
"Validate a model's accuracy on the [COCO](https://cocodataset.org/#home) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
]
},
{
"cell_type": "code",
"metadata": {
"id": "WQPtK1QYVaD_",
"colab": {
"base_uri": "https://localhost:8080/"
},
"outputId": "cf7d52f0-281c-4c96-a488-79f5908f8426"
},
"source": [
"# Download COCO val\n",
"torch.hub.download_url_to_file('https://ultralytics.com/assets/coco2017val.zip', 'tmp.zip') # download (780M - 5000 images)\n",
"!unzip -q tmp.zip -d ../datasets && rm tmp.zip # unzip"
],
"execution_count": null,
"outputs": [
{
"output_type": "stream",
"name": "stderr",
"text": [
"100%|██████████| 780M/780M [00:12<00:00, 66.6MB/s]\n"
]
}
]
},
{
"cell_type": "code",
"metadata": {
"id": "X58w8JLpMnjH",
"colab": {
"base_uri": "https://localhost:8080/"
},
"outputId": "3e234e05-ee8b-4ad1-b1a4-f6a55d5e4f3d"
},
"source": [
"# Validate YOLOv5s on COCO val\n",
"!python val.py --weights yolov5s.pt --data coco.yaml --img 640 --half"
],
"execution_count": null,
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"\u001b[34m\u001b[1mval: \u001b[0mdata=/content/yolov5/data/coco.yaml, weights=['yolov5s.pt'], batch_size=32, imgsz=640, conf_thres=0.001, iou_thres=0.6, max_det=300, task=val, device=, workers=8, single_cls=False, augment=False, verbose=False, save_txt=False, save_hybrid=False, save_conf=False, save_json=True, project=runs/val, name=exp, exist_ok=False, half=True, dnn=False\n",
"YOLOv5 🚀 v7.0-136-g71244ae Python-3.9.16 torch-2.0.0+cu118 CUDA:0 (Tesla T4, 15102MiB)\n",
"\n",
"Fusing layers... \n",
"YOLOv5s summary: 213 layers, 7225885 parameters, 0 gradients\n",
"\u001b[34m\u001b[1mval: \u001b[0mScanning /content/datasets/coco/val2017... 4952 images, 48 backgrounds, 0 corrupt: 100% 5000/5000 [00:02<00:00, 2024.59it/s]\n",
"\u001b[34m\u001b[1mval: \u001b[0mNew cache created: /content/datasets/coco/val2017.cache\n",
" Class Images Instances P R mAP50 mAP50-95: 100% 157/157 [01:25<00:00, 1.84it/s]\n",
" all 5000 36335 0.671 0.519 0.566 0.371\n",
"Speed: 0.1ms pre-process, 3.1ms inference, 2.3ms NMS per image at shape (32, 3, 640, 640)\n",
"\n",
"Evaluating pycocotools mAP... saving runs/val/exp/yolov5s_predictions.json...\n",
"loading annotations into memory...\n",
"Done (t=0.43s)\n",
"creating index...\n",
"index created!\n",
"Loading and preparing results...\n",
"DONE (t=5.32s)\n",
"creating index...\n",
"index created!\n",
"Running per image evaluation...\n",
"Evaluate annotation type *bbox*\n",
"DONE (t=78.89s).\n",
"Accumulating evaluation results...\n",
"DONE (t=14.51s).\n",
" Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.374\n",
" Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.572\n",
" Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.402\n",
" Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.211\n",
" Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.423\n",
" Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.489\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.311\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.516\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.566\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.378\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.625\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.722\n",
"Results saved to \u001b[1mruns/val/exp\u001b[0m\n"
]
}
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "ZY2VXXXu74w5"
},
"source": [
"# 3. Train\n",
"\n",
"
"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "0eq1SMWl6Sfn"
},
"source": [
"# 2. Validate\n",
"Validate a model's accuracy on the [COCO](https://cocodataset.org/#home) dataset's `val` or `test` splits. Models are downloaded automatically from the [latest YOLOv5 release](https://github.com/ultralytics/yolov5/releases). To show results by class use the `--verbose` flag."
]
},
{
"cell_type": "code",
"metadata": {
"id": "WQPtK1QYVaD_",
"colab": {
"base_uri": "https://localhost:8080/"
},
"outputId": "cf7d52f0-281c-4c96-a488-79f5908f8426"
},
"source": [
"# Download COCO val\n",
"torch.hub.download_url_to_file('https://ultralytics.com/assets/coco2017val.zip', 'tmp.zip') # download (780M - 5000 images)\n",
"!unzip -q tmp.zip -d ../datasets && rm tmp.zip # unzip"
],
"execution_count": null,
"outputs": [
{
"output_type": "stream",
"name": "stderr",
"text": [
"100%|██████████| 780M/780M [00:12<00:00, 66.6MB/s]\n"
]
}
]
},
{
"cell_type": "code",
"metadata": {
"id": "X58w8JLpMnjH",
"colab": {
"base_uri": "https://localhost:8080/"
},
"outputId": "3e234e05-ee8b-4ad1-b1a4-f6a55d5e4f3d"
},
"source": [
"# Validate YOLOv5s on COCO val\n",
"!python val.py --weights yolov5s.pt --data coco.yaml --img 640 --half"
],
"execution_count": null,
"outputs": [
{
"output_type": "stream",
"name": "stdout",
"text": [
"\u001b[34m\u001b[1mval: \u001b[0mdata=/content/yolov5/data/coco.yaml, weights=['yolov5s.pt'], batch_size=32, imgsz=640, conf_thres=0.001, iou_thres=0.6, max_det=300, task=val, device=, workers=8, single_cls=False, augment=False, verbose=False, save_txt=False, save_hybrid=False, save_conf=False, save_json=True, project=runs/val, name=exp, exist_ok=False, half=True, dnn=False\n",
"YOLOv5 🚀 v7.0-136-g71244ae Python-3.9.16 torch-2.0.0+cu118 CUDA:0 (Tesla T4, 15102MiB)\n",
"\n",
"Fusing layers... \n",
"YOLOv5s summary: 213 layers, 7225885 parameters, 0 gradients\n",
"\u001b[34m\u001b[1mval: \u001b[0mScanning /content/datasets/coco/val2017... 4952 images, 48 backgrounds, 0 corrupt: 100% 5000/5000 [00:02<00:00, 2024.59it/s]\n",
"\u001b[34m\u001b[1mval: \u001b[0mNew cache created: /content/datasets/coco/val2017.cache\n",
" Class Images Instances P R mAP50 mAP50-95: 100% 157/157 [01:25<00:00, 1.84it/s]\n",
" all 5000 36335 0.671 0.519 0.566 0.371\n",
"Speed: 0.1ms pre-process, 3.1ms inference, 2.3ms NMS per image at shape (32, 3, 640, 640)\n",
"\n",
"Evaluating pycocotools mAP... saving runs/val/exp/yolov5s_predictions.json...\n",
"loading annotations into memory...\n",
"Done (t=0.43s)\n",
"creating index...\n",
"index created!\n",
"Loading and preparing results...\n",
"DONE (t=5.32s)\n",
"creating index...\n",
"index created!\n",
"Running per image evaluation...\n",
"Evaluate annotation type *bbox*\n",
"DONE (t=78.89s).\n",
"Accumulating evaluation results...\n",
"DONE (t=14.51s).\n",
" Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.374\n",
" Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.572\n",
" Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.402\n",
" Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.211\n",
" Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.423\n",
" Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.489\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.311\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.516\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.566\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.378\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.625\n",
" Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.722\n",
"Results saved to \u001b[1mruns/val/exp\u001b[0m\n"
]
}
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "ZY2VXXXu74w5"
},
"source": [
"# 3. Train\n",
"\n",
"
"
],
"metadata": {
"id": "nWOsI5wJR1o3"
}
},
{
"cell_type": "markdown",
"source": [
"## ClearML Logging and Automation 🌟 NEW\n",
"\n",
"[ClearML](https://cutt.ly/yolov5-notebook-clearml) is completely integrated into YOLOv5 to track your experimentation, manage dataset versions and even remotely execute training runs. To enable ClearML (check cells above):\n",
"\n",
"- `pip install clearml`\n",
"- run `clearml-init` to connect to a ClearML server (**deploy your own [open-source server](https://github.com/allegroai/clearml-server)**, or use our [free hosted server](https://cutt.ly/yolov5-notebook-clearml))\n",
"\n",
"You'll get all the great expected features from an experiment manager: live updates, model upload, experiment comparison etc. but ClearML also tracks uncommitted changes and installed packages for example. Thanks to that ClearML Tasks (which is what we call experiments) are also reproducible on different machines! With only 1 extra line, we can schedule a YOLOv5 training task on a queue to be executed by any number of ClearML Agents (workers).\n",
"\n",
"You can use ClearML Data to version your dataset and then pass it to YOLOv5 simply using its unique ID. This will help you keep track of your data without adding extra hassle. Explore the [ClearML Tutorial](https://docs.ultralytics.com/yolov5/tutorials/clearml_logging_integration) for details!\n",
"\n",
"\n",
""
],
"metadata": {
"id": "Lay2WsTjNJzP"
}
},
{
"cell_type": "markdown",
"metadata": {
"id": "-WPvRbS5Swl6"
},
"source": [
"## Local Logging\n",
"\n",
"Training results are automatically logged with [Tensorboard](https://www.tensorflow.org/tensorboard) and [CSV](https://github.com/ultralytics/yolov5/pull/4148) loggers to `runs/train`, with a new experiment directory created for each new training as `runs/train/exp2`, `runs/train/exp3`, etc.\n",
"\n",
"This directory contains train and val statistics, mosaics, labels, predictions and augmentated mosaics, as well as metrics and charts including precision-recall (PR) curves and confusion matrices.\n",
"\n",
"\n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "Zelyeqbyt3GD"
},
"source": [
"# Environments\n",
"\n",
"YOLOv5 may be run in any of the following up-to-date verified environments (with all dependencies including [CUDA](https://developer.nvidia.com/cuda)/[CUDNN](https://developer.nvidia.com/cudnn), [Python](https://www.python.org/) and [PyTorch](https://pytorch.org/) preinstalled):\n",
"\n",
"- **Notebooks** with free GPU: \n",
"- **Google Cloud** Deep Learning VM. See [GCP Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/google_cloud_quickstart_tutorial/)\n",
"- **Amazon** Deep Learning AMI. See [AWS Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/aws_quickstart_tutorial/)\n",
"- **Docker Image**. See [Docker Quickstart Guide](https://docs.ultralytics.com/yolov5/environments/docker_image_quickstart_tutorial/) \n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "6Qu7Iesl0p54"
},
"source": [
"# Status\n",
"\n",
"\n",
"\n",
"If this badge is green, all [YOLOv5 GitHub Actions](https://github.com/ultralytics/yolov5/actions) Continuous Integration (CI) tests are currently passing. CI tests verify correct operation of YOLOv5 training ([train.py](https://github.com/ultralytics/yolov5/blob/master/train.py)), testing ([val.py](https://github.com/ultralytics/yolov5/blob/master/val.py)), inference ([detect.py](https://github.com/ultralytics/yolov5/blob/master/detect.py)) and export ([export.py](https://github.com/ultralytics/yolov5/blob/master/export.py)) on macOS, Windows, and Ubuntu every 24 hours and on every commit.\n"
]
},
{
"cell_type": "markdown",
"metadata": {
"id": "IEijrePND_2I"
},
"source": [
"# Appendix\n",
"\n",
"Additional content below."
]
},
{
"cell_type": "code",
"metadata": {
"id": "GMusP4OAxFu6"
},
"source": [
"# YOLOv5 PyTorch HUB Inference (DetectionModels only)\n",
"import torch\n",
"\n",
"model = torch.hub.load('ultralytics/yolov5', 'yolov5s', force_reload=True, trust_repo=True) # or yolov5n - yolov5x6 or custom\n",
"im = 'https://ultralytics.com/images/zidane.jpg' # file, Path, PIL.Image, OpenCV, nparray, list\n",
"results = model(im) # inference\n",
"results.print() # or .show(), .save(), .crop(), .pandas(), etc."
],
"execution_count": null,
"outputs": []
}
]
}
================================================
FILE: utils/__init__.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""utils/initialization."""
import contextlib
import platform
import threading
def emojis(str=""):
"""Returns an emoji-safe version of a string, stripped of emojis on Windows platforms."""
return str.encode().decode("ascii", "ignore") if platform.system() == "Windows" else str
class TryExcept(contextlib.ContextDecorator):
# YOLOv5 TryExcept class. Usage: @TryExcept() decorator or 'with TryExcept():' context manager
def __init__(self, msg=""):
"""Initializes TryExcept with an optional message, used as a decorator or context manager for error handling."""
self.msg = msg
def __enter__(self):
"""Enter the runtime context related to this object for error handling with an optional message."""
pass
def __exit__(self, exc_type, value, traceback):
"""Context manager exit method that prints an error message with emojis if an exception occurred, always returns
True.
"""
if value:
print(emojis(f"{self.msg}{': ' if self.msg else ''}{value}"))
return True
def threaded(func):
"""Decorator @threaded to run a function in a separate thread, returning the thread instance."""
def wrapper(*args, **kwargs):
thread = threading.Thread(target=func, args=args, kwargs=kwargs, daemon=True)
thread.start()
return thread
return wrapper
def join_threads(verbose=False):
"""
Joins all daemon threads, optionally printing their names if verbose is True.
Example: atexit.register(lambda: join_threads())
"""
main_thread = threading.current_thread()
for t in threading.enumerate():
if t is not main_thread:
if verbose:
print(f"Joining thread {t.name}")
t.join()
def notebook_init(verbose=True):
"""Initializes notebook environment by checking requirements, cleaning up, and displaying system info."""
print("Checking setup...")
import os
import shutil
from ultralytics.utils.checks import check_requirements
from utils.general import check_font, is_colab
from utils.torch_utils import select_device # imports
check_font()
import psutil
if check_requirements("wandb", install=False):
os.system("pip uninstall -y wandb") # eliminate unexpected account creation prompt with infinite hang
if is_colab():
shutil.rmtree("/content/sample_data", ignore_errors=True) # remove colab /sample_data directory
# System info
display = None
if verbose:
gb = 1 << 30 # bytes to GiB (1024 ** 3)
ram = psutil.virtual_memory().total
total, used, free = shutil.disk_usage("/")
with contextlib.suppress(Exception): # clear display if ipython is installed
from IPython import display
display.clear_output()
s = f"({os.cpu_count()} CPUs, {ram / gb:.1f} GB RAM, {(total - free) / gb:.1f}/{total / gb:.1f} GB disk)"
else:
s = ""
select_device(newline=False)
print(emojis(f"Setup complete ✅ {s}"))
return display
================================================
FILE: utils/activations.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Activation functions."""
import torch
import torch.nn as nn
import torch.nn.functional as F
class SiLU(nn.Module):
@staticmethod
def forward(x):
"""
Applies the Sigmoid-weighted Linear Unit (SiLU) activation function.
https://arxiv.org/pdf/1606.08415.pdf.
"""
return x * torch.sigmoid(x)
class Hardswish(nn.Module):
@staticmethod
def forward(x):
"""
Applies the Hardswish activation function, compatible with TorchScript, CoreML, and ONNX.
Equivalent to x * F.hardsigmoid(x)
"""
return x * F.hardtanh(x + 3, 0.0, 6.0) / 6.0 # for TorchScript, CoreML and ONNX
class Mish(nn.Module):
"""Mish activation https://github.com/digantamisra98/Mish."""
@staticmethod
def forward(x):
"""Applies the Mish activation function, a smooth alternative to ReLU."""
return x * F.softplus(x).tanh()
class MemoryEfficientMish(nn.Module):
class F(torch.autograd.Function):
@staticmethod
def forward(ctx, x):
"""Applies the Mish activation function, a smooth ReLU alternative, to the input tensor `x`."""
ctx.save_for_backward(x)
return x.mul(torch.tanh(F.softplus(x))) # x * tanh(ln(1 + exp(x)))
@staticmethod
def backward(ctx, grad_output):
"""Computes the gradient of the Mish activation function with respect to input `x`."""
x = ctx.saved_tensors[0]
sx = torch.sigmoid(x)
fx = F.softplus(x).tanh()
return grad_output * (fx + x * sx * (1 - fx * fx))
def forward(self, x):
"""Applies the Mish activation function to the input tensor `x`."""
return self.F.apply(x)
class FReLU(nn.Module):
"""FReLU activation https://arxiv.org/abs/2007.11824."""
def __init__(self, c1, k=3): # ch_in, kernel
"""Initializes FReLU activation with channel `c1` and kernel size `k`."""
super().__init__()
self.conv = nn.Conv2d(c1, c1, k, 1, 1, groups=c1, bias=False)
self.bn = nn.BatchNorm2d(c1)
def forward(self, x):
"""
Applies FReLU activation with max operation between input and BN-convolved input.
https://arxiv.org/abs/2007.11824
"""
return torch.max(x, self.bn(self.conv(x)))
class AconC(nn.Module):
"""
ACON activation (activate or not) function.
AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
See "Activate or Not: Learning Customized Activation" https://arxiv.org/pdf/2009.04759.pdf.
"""
def __init__(self, c1):
"""Initializes AconC with learnable parameters p1, p2, and beta for channel-wise activation control."""
super().__init__()
self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
self.beta = nn.Parameter(torch.ones(1, c1, 1, 1))
def forward(self, x):
"""Applies AconC activation function with learnable parameters for channel-wise control on input tensor x."""
dpx = (self.p1 - self.p2) * x
return dpx * torch.sigmoid(self.beta * dpx) + self.p2 * x
class MetaAconC(nn.Module):
"""
ACON activation (activate or not) function.
AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
See "Activate or Not: Learning Customized Activation" https://arxiv.org/pdf/2009.04759.pdf.
"""
def __init__(self, c1, k=1, s=1, r=16):
"""Initializes MetaAconC with params: channel_in (c1), kernel size (k=1), stride (s=1), reduction (r=16)."""
super().__init__()
c2 = max(r, c1 // r)
self.p1 = nn.Parameter(torch.randn(1, c1, 1, 1))
self.p2 = nn.Parameter(torch.randn(1, c1, 1, 1))
self.fc1 = nn.Conv2d(c1, c2, k, s, bias=True)
self.fc2 = nn.Conv2d(c2, c1, k, s, bias=True)
# self.bn1 = nn.BatchNorm2d(c2)
# self.bn2 = nn.BatchNorm2d(c1)
def forward(self, x):
"""Applies a forward pass transforming input `x` using learnable parameters and sigmoid activation."""
y = x.mean(dim=2, keepdims=True).mean(dim=3, keepdims=True)
# batch-size 1 bug/instabilities https://github.com/ultralytics/yolov5/issues/2891
# beta = torch.sigmoid(self.bn2(self.fc2(self.bn1(self.fc1(y))))) # bug/unstable
beta = torch.sigmoid(self.fc2(self.fc1(y))) # bug patch BN layers removed
dpx = (self.p1 - self.p2) * x
return dpx * torch.sigmoid(beta * dpx) + self.p2 * x
================================================
FILE: utils/augmentations.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Image augmentation functions."""
import math
import random
import cv2
import numpy as np
import torch
import torchvision.transforms as T
import torchvision.transforms.functional as TF
from utils.general import LOGGER, check_version, colorstr, resample_segments, segment2box, xywhn2xyxy
from utils.metrics import bbox_ioa
IMAGENET_MEAN = 0.485, 0.456, 0.406 # RGB mean
IMAGENET_STD = 0.229, 0.224, 0.225 # RGB standard deviation
class Albumentations:
# YOLOv5 Albumentations class (optional, only used if package is installed)
def __init__(self, size=640):
"""Initializes Albumentations class for optional data augmentation in YOLOv5 with specified input size."""
self.transform = None
prefix = colorstr("albumentations: ")
try:
import albumentations as A
check_version(A.__version__, "1.0.3", hard=True) # version requirement
T = [
A.RandomResizedCrop(height=size, width=size, scale=(0.8, 1.0), ratio=(0.9, 1.11), p=0.0),
A.Blur(p=0.01),
A.MedianBlur(p=0.01),
A.ToGray(p=0.01),
A.CLAHE(p=0.01),
A.RandomBrightnessContrast(p=0.0),
A.RandomGamma(p=0.0),
A.ImageCompression(quality_lower=75, p=0.0),
] # transforms
self.transform = A.Compose(T, bbox_params=A.BboxParams(format="yolo", label_fields=["class_labels"]))
LOGGER.info(prefix + ", ".join(f"{x}".replace("always_apply=False, ", "") for x in T if x.p))
except ImportError: # package not installed, skip
pass
except Exception as e:
LOGGER.info(f"{prefix}{e}")
def __call__(self, im, labels, p=1.0):
"""Applies transformations to an image and labels with probability `p`, returning updated image and labels."""
if self.transform and random.random() < p:
new = self.transform(image=im, bboxes=labels[:, 1:], class_labels=labels[:, 0]) # transformed
im, labels = new["image"], np.array([[c, *b] for c, b in zip(new["class_labels"], new["bboxes"])])
return im, labels
def normalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD, inplace=False):
"""
Applies ImageNet normalization to RGB images in BCHW format, modifying them in-place if specified.
Example: y = (x - mean) / std
"""
return TF.normalize(x, mean, std, inplace=inplace)
def denormalize(x, mean=IMAGENET_MEAN, std=IMAGENET_STD):
"""Reverses ImageNet normalization for BCHW format RGB images by applying `x = x * std + mean`."""
for i in range(3):
x[:, i] = x[:, i] * std[i] + mean[i]
return x
def augment_hsv(im, hgain=0.5, sgain=0.5, vgain=0.5):
"""Applies HSV color-space augmentation to an image with random gains for hue, saturation, and value."""
if hgain or sgain or vgain:
r = np.random.uniform(-1, 1, 3) * [hgain, sgain, vgain] + 1 # random gains
hue, sat, val = cv2.split(cv2.cvtColor(im, cv2.COLOR_BGR2HSV))
dtype = im.dtype # uint8
x = np.arange(0, 256, dtype=r.dtype)
lut_hue = ((x * r[0]) % 180).astype(dtype)
lut_sat = np.clip(x * r[1], 0, 255).astype(dtype)
lut_val = np.clip(x * r[2], 0, 255).astype(dtype)
im_hsv = cv2.merge((cv2.LUT(hue, lut_hue), cv2.LUT(sat, lut_sat), cv2.LUT(val, lut_val)))
cv2.cvtColor(im_hsv, cv2.COLOR_HSV2BGR, dst=im) # no return needed
def hist_equalize(im, clahe=True, bgr=False):
"""Equalizes image histogram, with optional CLAHE, for BGR or RGB image with shape (n,m,3) and range 0-255."""
yuv = cv2.cvtColor(im, cv2.COLOR_BGR2YUV if bgr else cv2.COLOR_RGB2YUV)
if clahe:
c = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
yuv[:, :, 0] = c.apply(yuv[:, :, 0])
else:
yuv[:, :, 0] = cv2.equalizeHist(yuv[:, :, 0]) # equalize Y channel histogram
return cv2.cvtColor(yuv, cv2.COLOR_YUV2BGR if bgr else cv2.COLOR_YUV2RGB) # convert YUV image to RGB
def replicate(im, labels):
"""
Replicates half of the smallest object labels in an image for data augmentation.
Returns augmented image and labels.
"""
h, w = im.shape[:2]
boxes = labels[:, 1:].astype(int)
x1, y1, x2, y2 = boxes.T
s = ((x2 - x1) + (y2 - y1)) / 2 # side length (pixels)
for i in s.argsort()[: round(s.size * 0.5)]: # smallest indices
x1b, y1b, x2b, y2b = boxes[i]
bh, bw = y2b - y1b, x2b - x1b
yc, xc = int(random.uniform(0, h - bh)), int(random.uniform(0, w - bw)) # offset x, y
x1a, y1a, x2a, y2a = [xc, yc, xc + bw, yc + bh]
im[y1a:y2a, x1a:x2a] = im[y1b:y2b, x1b:x2b] # im4[ymin:ymax, xmin:xmax]
labels = np.append(labels, [[labels[i, 0], x1a, y1a, x2a, y2a]], axis=0)
return im, labels
def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
"""Resizes and pads image to new_shape with stride-multiple constraints, returns resized image, ratio, padding."""
shape = im.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better val mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scaleFill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im, ratio, (dw, dh)
def random_perspective(
im, targets=(), segments=(), degrees=10, translate=0.1, scale=0.1, shear=10, perspective=0.0, border=(0, 0)
):
# torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(0.1, 0.1), scale=(0.9, 1.1), shear=(-10, 10))
# targets = [cls, xyxy]
height = im.shape[0] + border[0] * 2 # shape(h,w,c)
width = im.shape[1] + border[1] * 2
# Center
C = np.eye(3)
C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
# Perspective
P = np.eye(3)
P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
# Rotation and Scale
R = np.eye(3)
a = random.uniform(-degrees, degrees)
# a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
s = random.uniform(1 - scale, 1 + scale)
# s = 2 ** random.uniform(-scale, scale)
R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
# Shear
S = np.eye(3)
S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
# Translation
T = np.eye(3)
T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
# Combined rotation matrix
M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
if perspective:
im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
else: # affine
im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
# Visualize
# import matplotlib.pyplot as plt
# ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
# ax[0].imshow(im[:, :, ::-1]) # base
# ax[1].imshow(im2[:, :, ::-1]) # warped
# Transform label coordinates
n = len(targets)
if n:
use_segments = any(x.any() for x in segments) and len(segments) == n
new = np.zeros((n, 4))
if use_segments: # warp segments
segments = resample_segments(segments) # upsample
for i, segment in enumerate(segments):
xy = np.ones((len(segment), 3))
xy[:, :2] = segment
xy = xy @ M.T # transform
xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
# clip
new[i] = segment2box(xy, width, height)
else: # warp boxes
xy = np.ones((n * 4, 3))
xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
xy = xy @ M.T # transform
xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
# create new boxes
x = xy[:, [0, 2, 4, 6]]
y = xy[:, [1, 3, 5, 7]]
new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
# clip
new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
# filter candidates
i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
targets = targets[i]
targets[:, 1:5] = new[i]
return im, targets
def copy_paste(im, labels, segments, p=0.5):
"""
Applies Copy-Paste augmentation by flipping and merging segments and labels on an image.
Details at https://arxiv.org/abs/2012.07177.
"""
n = len(segments)
if p and n:
h, w, c = im.shape # height, width, channels
im_new = np.zeros(im.shape, np.uint8)
for j in random.sample(range(n), k=round(p * n)):
l, s = labels[j], segments[j]
box = w - l[3], l[2], w - l[1], l[4]
ioa = bbox_ioa(box, labels[:, 1:5]) # intersection over area
if (ioa < 0.30).all(): # allow 30% obscuration of existing labels
labels = np.concatenate((labels, [[l[0], *box]]), 0)
segments.append(np.concatenate((w - s[:, 0:1], s[:, 1:2]), 1))
cv2.drawContours(im_new, [segments[j].astype(np.int32)], -1, (1, 1, 1), cv2.FILLED)
result = cv2.flip(im, 1) # augment segments (flip left-right)
i = cv2.flip(im_new, 1).astype(bool)
im[i] = result[i] # cv2.imwrite('debug.jpg', im) # debug
return im, labels, segments
def cutout(im, labels, p=0.5):
"""
Applies cutout augmentation to an image with optional label adjustment, using random masks of varying sizes.
Details at https://arxiv.org/abs/1708.04552.
"""
if random.random() < p:
h, w = im.shape[:2]
scales = [0.5] * 1 + [0.25] * 2 + [0.125] * 4 + [0.0625] * 8 + [0.03125] * 16 # image size fraction
for s in scales:
mask_h = random.randint(1, int(h * s)) # create random masks
mask_w = random.randint(1, int(w * s))
# box
xmin = max(0, random.randint(0, w) - mask_w // 2)
ymin = max(0, random.randint(0, h) - mask_h // 2)
xmax = min(w, xmin + mask_w)
ymax = min(h, ymin + mask_h)
# apply random color mask
im[ymin:ymax, xmin:xmax] = [random.randint(64, 191) for _ in range(3)]
# return unobscured labels
if len(labels) and s > 0.03:
box = np.array([xmin, ymin, xmax, ymax], dtype=np.float32)
ioa = bbox_ioa(box, xywhn2xyxy(labels[:, 1:5], w, h)) # intersection over area
labels = labels[ioa < 0.60] # remove >60% obscured labels
return labels
def mixup(im, labels, im2, labels2):
"""
Applies MixUp augmentation by blending images and labels.
See https://arxiv.org/pdf/1710.09412.pdf for details.
"""
r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
im = (im * r + im2 * (1 - r)).astype(np.uint8)
labels = np.concatenate((labels, labels2), 0)
return im, labels
def box_candidates(box1, box2, wh_thr=2, ar_thr=100, area_thr=0.1, eps=1e-16):
"""
Filters bounding box candidates by minimum width-height threshold `wh_thr` (pixels), aspect ratio threshold
`ar_thr`, and area ratio threshold `area_thr`.
box1(4,n) is before augmentation, box2(4,n) is after augmentation.
"""
w1, h1 = box1[2] - box1[0], box1[3] - box1[1]
w2, h2 = box2[2] - box2[0], box2[3] - box2[1]
ar = np.maximum(w2 / (h2 + eps), h2 / (w2 + eps)) # aspect ratio
return (w2 > wh_thr) & (h2 > wh_thr) & (w2 * h2 / (w1 * h1 + eps) > area_thr) & (ar < ar_thr) # candidates
def classify_albumentations(
augment=True,
size=224,
scale=(0.08, 1.0),
ratio=(0.75, 1.0 / 0.75), # 0.75, 1.33
hflip=0.5,
vflip=0.0,
jitter=0.4,
mean=IMAGENET_MEAN,
std=IMAGENET_STD,
auto_aug=False,
):
# YOLOv5 classification Albumentations (optional, only used if package is installed)
prefix = colorstr("albumentations: ")
try:
import albumentations as A
from albumentations.pytorch import ToTensorV2
check_version(A.__version__, "1.0.3", hard=True) # version requirement
if augment: # Resize and crop
T = [A.RandomResizedCrop(height=size, width=size, scale=scale, ratio=ratio)]
if auto_aug:
# TODO: implement AugMix, AutoAug & RandAug in albumentation
LOGGER.info(f"{prefix}auto augmentations are currently not supported")
else:
if hflip > 0:
T += [A.HorizontalFlip(p=hflip)]
if vflip > 0:
T += [A.VerticalFlip(p=vflip)]
if jitter > 0:
color_jitter = (float(jitter),) * 3 # repeat value for brightness, contrast, saturation, 0 hue
T += [A.ColorJitter(*color_jitter, 0)]
else: # Use fixed crop for eval set (reproducibility)
T = [A.SmallestMaxSize(max_size=size), A.CenterCrop(height=size, width=size)]
T += [A.Normalize(mean=mean, std=std), ToTensorV2()] # Normalize and convert to Tensor
LOGGER.info(prefix + ", ".join(f"{x}".replace("always_apply=False, ", "") for x in T if x.p))
return A.Compose(T)
except ImportError: # package not installed, skip
LOGGER.warning(f"{prefix}⚠️ not found, install with `pip install albumentations` (recommended)")
except Exception as e:
LOGGER.info(f"{prefix}{e}")
def classify_transforms(size=224):
"""Applies a series of transformations including center crop, ToTensor, and normalization for classification."""
assert isinstance(size, int), f"ERROR: classify_transforms size {size} must be integer, not (list, tuple)"
# T.Compose([T.ToTensor(), T.Resize(size), T.CenterCrop(size), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
return T.Compose([CenterCrop(size), ToTensor(), T.Normalize(IMAGENET_MEAN, IMAGENET_STD)])
class LetterBox:
# YOLOv5 LetterBox class for image preprocessing, i.e. T.Compose([LetterBox(size), ToTensor()])
def __init__(self, size=(640, 640), auto=False, stride=32):
"""Initializes a LetterBox object for YOLOv5 image preprocessing with optional auto sizing and stride
adjustment.
"""
super().__init__()
self.h, self.w = (size, size) if isinstance(size, int) else size
self.auto = auto # pass max size integer, automatically solve for short side using stride
self.stride = stride # used with auto
def __call__(self, im):
"""
Resizes and pads input image `im` (HWC format) to specified dimensions, maintaining aspect ratio.
im = np.array HWC
"""
imh, imw = im.shape[:2]
r = min(self.h / imh, self.w / imw) # ratio of new/old
h, w = round(imh * r), round(imw * r) # resized image
hs, ws = (math.ceil(x / self.stride) * self.stride for x in (h, w)) if self.auto else self.h, self.w
top, left = round((hs - h) / 2 - 0.1), round((ws - w) / 2 - 0.1)
im_out = np.full((self.h, self.w, 3), 114, dtype=im.dtype)
im_out[top : top + h, left : left + w] = cv2.resize(im, (w, h), interpolation=cv2.INTER_LINEAR)
return im_out
class CenterCrop:
# YOLOv5 CenterCrop class for image preprocessing, i.e. T.Compose([CenterCrop(size), ToTensor()])
def __init__(self, size=640):
"""Initializes CenterCrop for image preprocessing, accepting single int or tuple for size, defaults to 640."""
super().__init__()
self.h, self.w = (size, size) if isinstance(size, int) else size
def __call__(self, im):
"""
Applies center crop to the input image and resizes it to a specified size, maintaining aspect ratio.
im = np.array HWC
"""
imh, imw = im.shape[:2]
m = min(imh, imw) # min dimension
top, left = (imh - m) // 2, (imw - m) // 2
return cv2.resize(im[top : top + m, left : left + m], (self.w, self.h), interpolation=cv2.INTER_LINEAR)
class ToTensor:
# YOLOv5 ToTensor class for image preprocessing, i.e. T.Compose([LetterBox(size), ToTensor()])
def __init__(self, half=False):
"""Initializes ToTensor for YOLOv5 image preprocessing, with optional half precision (half=True for FP16)."""
super().__init__()
self.half = half
def __call__(self, im):
"""
Converts BGR np.array image from HWC to RGB CHW format, and normalizes to [0, 1], with support for FP16 if
`half=True`.
im = np.array HWC in BGR order
"""
im = np.ascontiguousarray(im.transpose((2, 0, 1))[::-1]) # HWC to CHW -> BGR to RGB -> contiguous
im = torch.from_numpy(im) # to torch
im = im.half() if self.half else im.float() # uint8 to fp16/32
im /= 255.0 # 0-255 to 0.0-1.0
return im
================================================
FILE: utils/autoanchor.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""AutoAnchor utils."""
import random
import numpy as np
import torch
import yaml
from tqdm import tqdm
from utils import TryExcept
from utils.general import LOGGER, TQDM_BAR_FORMAT, colorstr
PREFIX = colorstr("AutoAnchor: ")
def check_anchor_order(m):
"""Checks and corrects anchor order against stride in YOLOv5 Detect() module if necessary."""
a = m.anchors.prod(-1).mean(-1).view(-1) # mean anchor area per output layer
da = a[-1] - a[0] # delta a
ds = m.stride[-1] - m.stride[0] # delta s
if da and (da.sign() != ds.sign()): # same order
LOGGER.info(f"{PREFIX}Reversing anchor order")
m.anchors[:] = m.anchors.flip(0)
@TryExcept(f"{PREFIX}ERROR")
def check_anchors(dataset, model, thr=4.0, imgsz=640):
"""Evaluates anchor fit to dataset and adjusts if necessary, supporting customizable threshold and image size."""
m = model.module.model[-1] if hasattr(model, "module") else model.model[-1] # Detect()
shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
def metric(k): # compute metric
r = wh[:, None] / k[None]
x = torch.min(r, 1 / r).min(2)[0] # ratio metric
best = x.max(1)[0] # best_x
aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
bpr = (best > 1 / thr).float().mean() # best possible recall
return bpr, aat
stride = m.stride.to(m.anchors.device).view(-1, 1, 1) # model strides
anchors = m.anchors.clone() * stride # current anchors
bpr, aat = metric(anchors.cpu().view(-1, 2))
s = f"\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). "
if bpr > 0.98: # threshold to recompute
LOGGER.info(f"{s}Current anchors are a good fit to dataset ✅")
else:
LOGGER.info(f"{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...")
na = m.anchors.numel() // 2 # number of anchors
anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
new_bpr = metric(anchors)[0]
if new_bpr > bpr: # replace anchors
anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
m.anchors[:] = anchors.clone().view_as(m.anchors)
check_anchor_order(m) # must be in pixel-space (not grid-space)
m.anchors /= stride
s = f"{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)"
else:
s = f"{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)"
LOGGER.info(s)
def kmean_anchors(dataset="./data/coco128.yaml", n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
"""
Creates kmeans-evolved anchors from training dataset.
Arguments:
dataset: path to data.yaml, or a loaded dataset
n: number of anchors
img_size: image size used for training
thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
gen: generations to evolve anchors using genetic algorithm
verbose: print all results
Return:
k: kmeans evolved anchors
Usage:
from utils.autoanchor import *; _ = kmean_anchors()
"""
from scipy.cluster.vq import kmeans
npr = np.random
thr = 1 / thr
def metric(k, wh): # compute metrics
r = wh[:, None] / k[None]
x = torch.min(r, 1 / r).min(2)[0] # ratio metric
# x = wh_iou(wh, torch.tensor(k)) # iou metric
return x, x.max(1)[0] # x, best_x
def anchor_fitness(k): # mutation fitness
_, best = metric(torch.tensor(k, dtype=torch.float32), wh)
return (best * (best > thr).float()).mean() # fitness
def print_results(k, verbose=True):
k = k[np.argsort(k.prod(1))] # sort small to large
x, best = metric(k, wh0)
bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
s = (
f"{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n"
f"{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, "
f"past_thr={x[x > thr].mean():.3f}-mean: "
)
for x in k:
s += "%i,%i, " % (round(x[0]), round(x[1]))
if verbose:
LOGGER.info(s[:-2])
return k
if isinstance(dataset, str): # *.yaml file
with open(dataset, errors="ignore") as f:
data_dict = yaml.safe_load(f) # model dict
from utils.dataloaders import LoadImagesAndLabels
dataset = LoadImagesAndLabels(data_dict["train"], augment=True, rect=True)
# Get label wh
shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
# Filter
i = (wh0 < 3.0).any(1).sum()
if i:
LOGGER.info(f"{PREFIX}WARNING ⚠️ Extremely small objects found: {i} of {len(wh0)} labels are <3 pixels in size")
wh = wh0[(wh0 >= 2.0).any(1)].astype(np.float32) # filter > 2 pixels
# wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
# Kmeans init
try:
LOGGER.info(f"{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...")
assert n <= len(wh) # apply overdetermined constraint
s = wh.std(0) # sigmas for whitening
k = kmeans(wh / s, n, iter=30)[0] * s # points
assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
except Exception:
LOGGER.warning(f"{PREFIX}WARNING ⚠️ switching strategies from kmeans to random init")
k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
k = print_results(k, verbose=False)
# Plot
# k, d = [None] * 20, [None] * 20
# for i in tqdm(range(1, 21)):
# k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
# fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
# ax = ax.ravel()
# ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
# fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
# ax[0].hist(wh[wh[:, 0]<100, 0],400)
# ax[1].hist(wh[wh[:, 1]<100, 1],400)
# fig.savefig('wh.png', dpi=200)
# Evolve
f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
pbar = tqdm(range(gen), bar_format=TQDM_BAR_FORMAT) # progress bar
for _ in pbar:
v = np.ones(sh)
while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
kg = (k.copy() * v).clip(min=2.0)
fg = anchor_fitness(kg)
if fg > f:
f, k = fg, kg.copy()
pbar.desc = f"{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}"
if verbose:
print_results(k, verbose)
return print_results(k).astype(np.float32)
================================================
FILE: utils/autobatch.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Auto-batch utils."""
from copy import deepcopy
import numpy as np
import torch
from utils.general import LOGGER, colorstr
from utils.torch_utils import profile
def check_train_batch_size(model, imgsz=640, amp=True):
"""Checks and computes optimal training batch size for YOLOv5 model, given image size and AMP setting."""
with torch.cuda.amp.autocast(amp):
return autobatch(deepcopy(model).train(), imgsz) # compute optimal batch size
def autobatch(model, imgsz=640, fraction=0.8, batch_size=16):
"""Estimates optimal YOLOv5 batch size using `fraction` of CUDA memory."""
# Usage:
# import torch
# from utils.autobatch import autobatch
# model = torch.hub.load('ultralytics/yolov5', 'yolov5s', autoshape=False)
# print(autobatch(model))
# Check device
prefix = colorstr("AutoBatch: ")
LOGGER.info(f"{prefix}Computing optimal batch size for --imgsz {imgsz}")
device = next(model.parameters()).device # get model device
if device.type == "cpu":
LOGGER.info(f"{prefix}CUDA not detected, using default CPU batch-size {batch_size}")
return batch_size
if torch.backends.cudnn.benchmark:
LOGGER.info(f"{prefix} ⚠️ Requires torch.backends.cudnn.benchmark=False, using default batch-size {batch_size}")
return batch_size
# Inspect CUDA memory
gb = 1 << 30 # bytes to GiB (1024 ** 3)
d = str(device).upper() # 'CUDA:0'
properties = torch.cuda.get_device_properties(device) # device properties
t = properties.total_memory / gb # GiB total
r = torch.cuda.memory_reserved(device) / gb # GiB reserved
a = torch.cuda.memory_allocated(device) / gb # GiB allocated
f = t - (r + a) # GiB free
LOGGER.info(f"{prefix}{d} ({properties.name}) {t:.2f}G total, {r:.2f}G reserved, {a:.2f}G allocated, {f:.2f}G free")
# Profile batch sizes
batch_sizes = [1, 2, 4, 8, 16]
try:
img = [torch.empty(b, 3, imgsz, imgsz) for b in batch_sizes]
results = profile(img, model, n=3, device=device)
except Exception as e:
LOGGER.warning(f"{prefix}{e}")
# Fit a solution
y = [x[2] for x in results if x] # memory [2]
p = np.polyfit(batch_sizes[: len(y)], y, deg=1) # first degree polynomial fit
b = int((f * fraction - p[1]) / p[0]) # y intercept (optimal batch size)
if None in results: # some sizes failed
i = results.index(None) # first fail index
if b >= batch_sizes[i]: # y intercept above failure point
b = batch_sizes[max(i - 1, 0)] # select prior safe point
if b < 1 or b > 1024: # b outside of safe range
b = batch_size
LOGGER.warning(f"{prefix}WARNING ⚠️ CUDA anomaly detected, recommend restart environment and retry command.")
fraction = (np.polyval(p, b) + r + a) / t # actual fraction predicted
LOGGER.info(f"{prefix}Using batch-size {b} for {d} {t * fraction:.2f}G/{t:.2f}G ({fraction * 100:.0f}%) ✅")
return b
================================================
FILE: utils/aws/__init__.py
================================================
================================================
FILE: utils/aws/mime.sh
================================================
# AWS EC2 instance startup 'MIME' script https://aws.amazon.com/premiumsupport/knowledge-center/execute-user-data-ec2/
# This script will run on every instance restart, not only on first start
# --- DO NOT COPY ABOVE COMMENTS WHEN PASTING INTO USERDATA ---
Content-Type: multipart/mixed; boundary="//"
MIME-Version: 1.0
--//
Content-Type: text/cloud-config; charset="us-ascii"
MIME-Version: 1.0
Content-Transfer-Encoding: 7bit
Content-Disposition: attachment; filename="cloud-config.txt"
#cloud-config
cloud_final_modules:
- [scripts-user, always]
--//
Content-Type: text/x-shellscript; charset="us-ascii"
MIME-Version: 1.0
Content-Transfer-Encoding: 7bit
Content-Disposition: attachment; filename="userdata.txt"
#!/bin/bash
# --- paste contents of userdata.sh here ---
--//
================================================
FILE: utils/aws/resume.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Resume all interrupted trainings in yolov5/ dir including DDP trainings
# Usage: $ python utils/aws/resume.py
import os
import sys
from pathlib import Path
import torch
import yaml
FILE = Path(__file__).resolve()
ROOT = FILE.parents[2] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
port = 0 # --master_port
path = Path("").resolve()
for last in path.rglob("*/**/last.pt"):
ckpt = torch.load(last)
if ckpt["optimizer"] is None:
continue
# Load opt.yaml
with open(last.parent.parent / "opt.yaml", errors="ignore") as f:
opt = yaml.safe_load(f)
# Get device count
d = opt["device"].split(",") # devices
nd = len(d) # number of devices
ddp = nd > 1 or (nd == 0 and torch.cuda.device_count() > 1) # distributed data parallel
if ddp: # multi-GPU
port += 1
cmd = f"python -m torch.distributed.run --nproc_per_node {nd} --master_port {port} train.py --resume {last}"
else: # single-GPU
cmd = f"python train.py --resume {last}"
cmd += " > /dev/null 2>&1 &" # redirect output to dev/null and run in daemon thread
print(cmd)
os.system(cmd)
================================================
FILE: utils/aws/userdata.sh
================================================
#!/bin/bash
# AWS EC2 instance startup script https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/user-data.html
# This script will run only once on first instance start (for a re-start script see mime.sh)
# /home/ubuntu (ubuntu) or /home/ec2-user (amazon-linux) is working dir
# Use >300 GB SSD
cd home/ubuntu
if [ ! -d yolov5 ]; then
echo "Running first-time script." # install dependencies, download COCO, pull Docker
git clone https://github.com/ultralytics/yolov5 -b master && sudo chmod -R 777 yolov5
cd yolov5
bash data/scripts/get_coco.sh && echo "COCO done." &
sudo docker pull ultralytics/yolov5:latest && echo "Docker done." &
python -m pip install --upgrade pip && pip install -r requirements.txt && python detect.py && echo "Requirements done." &
wait && echo "All tasks done." # finish background tasks
else
echo "Running re-start script." # resume interrupted runs
i=0
list=$(sudo docker ps -qa) # container list i.e. $'one\ntwo\nthree\nfour'
while IFS= read -r id; do
((i++))
echo "restarting container $i: $id"
sudo docker start $id
# sudo docker exec -it $id python train.py --resume # single-GPU
sudo docker exec -d $id python utils/aws/resume.py # multi-scenario
done <<<"$list"
fi
================================================
FILE: utils/callbacks.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Callback utils."""
import threading
class Callbacks:
"""Handles all registered callbacks for YOLOv5 Hooks."""
def __init__(self):
"""Initializes a Callbacks object to manage registered YOLOv5 training event hooks."""
self._callbacks = {
"on_pretrain_routine_start": [],
"on_pretrain_routine_end": [],
"on_train_start": [],
"on_train_epoch_start": [],
"on_train_batch_start": [],
"optimizer_step": [],
"on_before_zero_grad": [],
"on_train_batch_end": [],
"on_train_epoch_end": [],
"on_val_start": [],
"on_val_batch_start": [],
"on_val_image_end": [],
"on_val_batch_end": [],
"on_val_end": [],
"on_fit_epoch_end": [], # fit = train + val
"on_model_save": [],
"on_train_end": [],
"on_params_update": [],
"teardown": [],
}
self.stop_training = False # set True to interrupt training
def register_action(self, hook, name="", callback=None):
"""
Register a new action to a callback hook.
Args:
hook: The callback hook name to register the action to
name: The name of the action for later reference
callback: The callback to fire
"""
assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
assert callable(callback), f"callback '{callback}' is not callable"
self._callbacks[hook].append({"name": name, "callback": callback})
def get_registered_actions(self, hook=None):
"""
Returns all the registered actions by callback hook.
Args:
hook: The name of the hook to check, defaults to all
"""
return self._callbacks[hook] if hook else self._callbacks
def run(self, hook, *args, thread=False, **kwargs):
"""
Loop through the registered actions and fire all callbacks on main thread.
Args:
hook: The name of the hook to check, defaults to all
args: Arguments to receive from YOLOv5
thread: (boolean) Run callbacks in daemon thread
kwargs: Keyword Arguments to receive from YOLOv5
"""
assert hook in self._callbacks, f"hook '{hook}' not found in callbacks {self._callbacks}"
for logger in self._callbacks[hook]:
if thread:
threading.Thread(target=logger["callback"], args=args, kwargs=kwargs, daemon=True).start()
else:
logger["callback"](*args, **kwargs)
================================================
FILE: utils/dataloaders.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Dataloaders and dataset utils."""
import contextlib
import glob
import hashlib
import json
import math
import os
import random
import shutil
import time
from itertools import repeat
from multiprocessing.pool import Pool, ThreadPool
from pathlib import Path
from threading import Thread
from urllib.parse import urlparse
import numpy as np
import psutil
import torch
import torch.nn.functional as F
import torchvision
import yaml
from PIL import ExifTags, Image, ImageOps
from torch.utils.data import DataLoader, Dataset, dataloader, distributed
from tqdm import tqdm
from utils import image_util
from utils.augmentations import (
Albumentations,
augment_hsv,
classify_albumentations,
classify_transforms,
copy_paste,
letterbox,
mixup,
random_perspective,
)
from utils.general import (
DATASETS_DIR,
LOGGER,
NUM_THREADS,
TQDM_BAR_FORMAT,
check_dataset,
check_requirements,
check_yaml,
clean_str,
cv2,
is_colab,
is_kaggle,
segments2boxes,
unzip_file,
xyn2xy,
xywh2xyxy,
xywhn2xyxy,
xyxy2xywhn,
)
from utils.torch_utils import torch_distributed_zero_first
# Parameters
HELP_URL = "See https://docs.ultralytics.com/yolov5/tutorials/train_custom_data"
IMG_FORMATS = "bmp", "dng", "jpeg", "jpg", "mpo", "png", "tif", "tiff", "webp", "pfm" # include image suffixes
VID_FORMATS = "asf", "avi", "gif", "m4v", "mkv", "mov", "mp4", "mpeg", "mpg", "ts", "wmv" # include video suffixes
LOCAL_RANK = int(os.getenv("LOCAL_RANK", -1)) # https://pytorch.org/docs/stable/elastic/run.html
RANK = int(os.getenv("RANK", -1))
WORLD_SIZE = int(os.getenv("WORLD_SIZE", 1))
PIN_MEMORY = str(os.getenv("PIN_MEMORY", True)).lower() == "true" # global pin_memory for dataloaders
# Get orientation exif tag
for orientation in ExifTags.TAGS.keys():
if ExifTags.TAGS[orientation] == "Orientation":
break
def get_hash(paths):
"""Generates a single SHA256 hash for a list of file or directory paths by combining their sizes and paths."""
size = sum(os.path.getsize(p) for p in paths if os.path.exists(p)) # sizes
h = hashlib.sha256(str(size).encode()) # hash sizes
h.update("".join(paths).encode()) # hash paths
return h.hexdigest() # return hash
def exif_size(img):
"""Returns corrected PIL image size (width, height) considering EXIF orientation."""
s = img.size # (width, height)
with contextlib.suppress(Exception):
rotation = dict(img._getexif().items())[orientation]
if rotation in [6, 8]: # rotation 270 or 90
s = (s[1], s[0])
return s
def exif_transpose(image):
"""
Transpose a PIL image accordingly if it has an EXIF Orientation tag.
Inplace version of https://github.com/python-pillow/Pillow/blob/master/src/PIL/ImageOps.py exif_transpose()
:param image: The image to transpose.
:return: An image.
"""
exif = image.getexif()
orientation = exif.get(0x0112, 1) # default 1
if orientation > 1:
method = {
2: Image.FLIP_LEFT_RIGHT,
3: Image.ROTATE_180,
4: Image.FLIP_TOP_BOTTOM,
5: Image.TRANSPOSE,
6: Image.ROTATE_270,
7: Image.TRANSVERSE,
8: Image.ROTATE_90,
}.get(orientation)
if method is not None:
image = image.transpose(method)
del exif[0x0112]
image.info["exif"] = exif.tobytes()
return image
def seed_worker(worker_id):
"""
Sets the seed for a dataloader worker to ensure reproducibility, based on PyTorch's randomness notes.
See https://pytorch.org/docs/stable/notes/randomness.html#dataloader.
"""
worker_seed = torch.initial_seed() % 2 ** 32
np.random.seed(worker_seed)
random.seed(worker_seed)
# Inherit from DistributedSampler and override iterator
# https://github.com/pytorch/pytorch/blob/master/torch/utils/data/distributed.py
class SmartDistributedSampler(distributed.DistributedSampler):
def __iter__(self):
"""Yields indices for distributed data sampling, shuffled deterministically based on epoch and seed."""
g = torch.Generator()
g.manual_seed(self.seed + self.epoch)
# determine the eventual size (n) of self.indices (DDP indices)
n = int((len(self.dataset) - self.rank - 1) / self.num_replicas) + 1 # num_replicas == WORLD_SIZE
idx = torch.randperm(n, generator=g)
if not self.shuffle:
idx = idx.sort()[0]
idx = idx.tolist()
if self.drop_last:
idx = idx[: self.num_samples]
else:
padding_size = self.num_samples - len(idx)
if padding_size <= len(idx):
idx += idx[:padding_size]
else:
idx += (idx * math.ceil(padding_size / len(idx)))[:padding_size]
return iter(idx)
def create_dataloader(
path,
imgsz,
batch_size,
stride,
single_cls=False,
hyp=None,
augment=False,
cache=False,
pad=0.0,
rect=False,
rank=-1,
workers=8,
image_weights=False,
quad=False,
prefix="",
shuffle=False,
seed=0,
):
if rect and shuffle:
LOGGER.warning("WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False")
shuffle = False
with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
dataset = LoadImagesAndLabels(
path,
imgsz,
batch_size,
augment=augment, # augmentation
hyp=hyp, # hyperparameters
rect=rect, # rectangular batches
cache_images=cache,
single_cls=single_cls,
stride=int(stride),
pad=pad,
image_weights=image_weights,
prefix=prefix,
rank=rank,
)
batch_size = min(batch_size, len(dataset))
nd = torch.cuda.device_count() # number of CUDA devices
nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
sampler = None if rank == -1 else SmartDistributedSampler(dataset, shuffle=shuffle)
loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
generator = torch.Generator()
generator.manual_seed(6148914691236517205 + seed + RANK)
return loader(
dataset,
batch_size=batch_size,
shuffle=shuffle and sampler is None,
num_workers=nw,
sampler=sampler,
pin_memory=PIN_MEMORY,
collate_fn=LoadImagesAndLabels.collate_fn4 if quad else LoadImagesAndLabels.collate_fn,
worker_init_fn=seed_worker,
generator=generator,
), dataset
class InfiniteDataLoader(dataloader.DataLoader):
"""
Dataloader that reuses workers.
Uses same syntax as vanilla DataLoader
"""
def __init__(self, *args, **kwargs):
"""Initializes an InfiniteDataLoader that reuses workers with standard DataLoader syntax, augmenting with a
repeating sampler.
"""
super().__init__(*args, **kwargs)
object.__setattr__(self, "batch_sampler", _RepeatSampler(self.batch_sampler))
self.iterator = super().__iter__()
def __len__(self):
"""Returns the length of the batch sampler's sampler in the InfiniteDataLoader."""
return len(self.batch_sampler.sampler)
def __iter__(self):
"""Yields batches of data indefinitely in a loop by resetting the sampler when exhausted."""
for _ in range(len(self)):
yield next(self.iterator)
class _RepeatSampler:
"""
Sampler that repeats forever.
Args:
sampler (Sampler)
"""
def __init__(self, sampler):
"""Initializes a perpetual sampler wrapping a provided `Sampler` instance for endless data iteration."""
self.sampler = sampler
def __iter__(self):
"""Returns an infinite iterator over the dataset by repeatedly yielding from the given sampler."""
while True:
yield from iter(self.sampler)
class LoadScreenshots:
# YOLOv5 screenshot dataloader, i.e. `python detect.py --source "screen 0 100 100 512 256"`
def __init__(self, source, img_size=640, stride=32, auto=True, transforms=None):
"""
Initializes a screenshot dataloader for YOLOv5 with specified source region, image size, stride, auto, and
transforms.
Source = [screen_number left top width height] (pixels)
"""
check_requirements("mss")
import mss
source, *params = source.split()
self.screen, left, top, width, height = 0, None, None, None, None # default to full screen 0
if len(params) == 1:
self.screen = int(params[0])
elif len(params) == 4:
left, top, width, height = (int(x) for x in params)
elif len(params) == 5:
self.screen, left, top, width, height = (int(x) for x in params)
self.img_size = img_size
self.stride = stride
self.transforms = transforms
self.auto = auto
self.mode = "stream"
self.frame = 0
self.sct = mss.mss()
# Parse monitor shape
monitor = self.sct.monitors[self.screen]
self.top = monitor["top"] if top is None else (monitor["top"] + top)
self.left = monitor["left"] if left is None else (monitor["left"] + left)
self.width = width or monitor["width"]
self.height = height or monitor["height"]
self.monitor = {"left": self.left, "top": self.top, "width": self.width, "height": self.height}
def __iter__(self):
"""Iterates over itself, enabling use in loops and iterable contexts."""
return self
def __next__(self):
"""Captures and returns the next screen frame as a BGR numpy array, cropping to only the first three channels
from BGRA.
"""
im0 = np.array(self.sct.grab(self.monitor))[:, :, :3] # [:, :, :3] BGRA to BGR
s = f"screen {self.screen} (LTWH): {self.left},{self.top},{self.width},{self.height}: "
if self.transforms:
im = self.transforms(im0) # transforms
else:
im = letterbox(im0, self.img_size, stride=self.stride, auto=self.auto)[0] # padded resize
im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
im = np.ascontiguousarray(im) # contiguous
self.frame += 1
return str(self.screen), im, im0, None, s, None # screen, img, original img, im0s, s
class LoadImages:
"""YOLOv5 image/video dataloader, i.e. `python detect.py --source image.jpg/vid.mp4`"""
def __init__(self, path, img_size=640, stride=32, auto=True, transforms=None, vid_stride=1, sub_size=None):
"""Initializes YOLOv5 loader for images/videos, supporting glob patterns, directories, and lists of paths."""
if isinstance(path, str) and Path(path).suffix == ".txt": # *.txt file with img/vid/dir on each line
path = Path(path).read_text().rsplit()
files = []
for p in sorted(path) if isinstance(path, (list, tuple)) else [path]:
p = str(Path(p).resolve())
if "*" in p:
files.extend(sorted(glob.glob(p, recursive=True))) # glob
elif os.path.isdir(p):
files.extend(sorted(glob.glob(os.path.join(p, "*.*")))) # dir
elif os.path.isfile(p):
files.append(p) # files
else:
raise FileNotFoundError(f"{p} does not exist")
images = [x for x in files if x.split(".")[-1].lower() in IMG_FORMATS]
videos = [x for x in files if x.split(".")[-1].lower() in VID_FORMATS]
ni, nv = len(images), len(videos)
self.img_size = img_size
self.stride = stride
self.files = images + videos
self.nf = ni + nv # number of files
self.video_flag = [False] * ni + [True] * nv
self.mode = "image"
self.auto = auto
self.transforms = transforms # optional
self.vid_stride = vid_stride # video frame-rate stride
self.sub_size = sub_size
if any(videos):
self._new_video(videos[0]) # new video
else:
self.cap = None
assert self.nf > 0, (
f"No images or videos found in {p}. "
f"Supported formats are:\nimages: {IMG_FORMATS}\nvideos: {VID_FORMATS}"
)
def __iter__(self):
"""Initializes iterator by resetting count and returns the iterator object itself."""
self.count = 0
return self
def __next__(self):
"""Advances to the next file in the dataset, raising StopIteration if at the end."""
if self.count == self.nf:
raise StopIteration
path = self.files[self.count]
if self.video_flag[self.count]:
# Read video
self.mode = "video"
for _ in range(self.vid_stride):
self.cap.grab()
ret_val, im0 = self.cap.retrieve()
while not ret_val:
self.count += 1
self.cap.release()
if self.count == self.nf: # last video
raise StopIteration
path = self.files[self.count]
self._new_video(path)
ret_val, im0 = self.cap.read()
self.frame += 1
# im0 = self._cv2_rotate(im0) # for use if cv2 autorotation is False
s = f"video {self.count + 1}/{self.nf} ({self.frame}/{self.frames}) {path}: "
else:
# Read image
self.count += 1
im0 = cv2.imread(path) # BGR
assert im0 is not None, f"Image Not Found {path}"
s = f"image {self.count}/{self.nf} {path}: "
ori_im0 = im0.copy()
if self.sub_size is not None:
im0 = image_util.crop_center(im0, *self.sub_size)
if self.transforms:
im = self.transforms(im0) # transforms
else:
im = letterbox(im0, self.img_size, stride=self.stride, auto=self.auto)[0] # padded resize
im = im.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
im = np.ascontiguousarray(im) # contiguous
return path, im, ori_im0, self.cap, s, im0
def _new_video(self, path):
"""Initializes a new video capture object with path, frame count adjusted by stride, and orientation
metadata.
"""
self.frame = 0
self.cap = cv2.VideoCapture(path)
self.frames = int(self.cap.get(cv2.CAP_PROP_FRAME_COUNT) / self.vid_stride)
self.orientation = int(self.cap.get(cv2.CAP_PROP_ORIENTATION_META)) # rotation degrees
# self.cap.set(cv2.CAP_PROP_ORIENTATION_AUTO, 0) # disable https://github.com/ultralytics/yolov5/issues/8493
def _cv2_rotate(self, im):
"""Rotates a cv2 image based on its orientation; supports 0, 90, and 180 degrees rotations."""
if self.orientation == 0:
return cv2.rotate(im, cv2.ROTATE_90_CLOCKWISE)
elif self.orientation == 180:
return cv2.rotate(im, cv2.ROTATE_90_COUNTERCLOCKWISE)
elif self.orientation == 90:
return cv2.rotate(im, cv2.ROTATE_180)
return im
def __len__(self):
"""Returns the number of files in the dataset."""
return self.nf # number of files
class LoadStreams:
# YOLOv5 streamloader, i.e. `python detect.py --source 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP streams`
def __init__(self, sources="file.streams", img_size=640, stride=32, auto=True, transforms=None, vid_stride=1):
"""Initializes a stream loader for processing video streams with YOLOv5, supporting various sources including
YouTube.
"""
torch.backends.cudnn.benchmark = True # faster for fixed-size inference
self.mode = "stream"
self.img_size = img_size
self.stride = stride
self.vid_stride = vid_stride # video frame-rate stride
sources = Path(sources).read_text().rsplit() if os.path.isfile(sources) else [sources]
n = len(sources)
self.sources = [clean_str(x) for x in sources] # clean source names for later
self.imgs, self.fps, self.frames, self.threads = [None] * n, [0] * n, [0] * n, [None] * n
for i, s in enumerate(sources): # index, source
# Start thread to read frames from video stream
st = f"{i + 1}/{n}: {s}... "
if urlparse(s).hostname in ("www.youtube.com", "youtube.com", "youtu.be"): # if source is YouTube video
# YouTube format i.e. 'https://www.youtube.com/watch?v=Zgi9g1ksQHc' or 'https://youtu.be/LNwODJXcvt4'
check_requirements(("pafy", "youtube_dl==2020.12.2"))
import pafy
s = pafy.new(s).getbest(preftype="mp4").url # YouTube URL
s = eval(s) if s.isnumeric() else s # i.e. s = '0' local webcam
if s == 0:
assert not is_colab(), "--source 0 webcam unsupported on Colab. Rerun command in a local environment."
assert not is_kaggle(), "--source 0 webcam unsupported on Kaggle. Rerun command in a local environment."
cap = cv2.VideoCapture(s)
assert cap.isOpened(), f"{st}Failed to open {s}"
w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = cap.get(cv2.CAP_PROP_FPS) # warning: may return 0 or nan
self.frames[i] = max(int(cap.get(cv2.CAP_PROP_FRAME_COUNT)), 0) or float("inf") # infinite stream fallback
self.fps[i] = max((fps if math.isfinite(fps) else 0) % 100, 0) or 30 # 30 FPS fallback
_, self.imgs[i] = cap.read() # guarantee first frame
self.threads[i] = Thread(target=self.update, args=([i, cap, s]), daemon=True)
LOGGER.info(f"{st} Success ({self.frames[i]} frames {w}x{h} at {self.fps[i]:.2f} FPS)")
self.threads[i].start()
LOGGER.info("") # newline
# check for common shapes
s = np.stack([letterbox(x, img_size, stride=stride, auto=auto)[0].shape for x in self.imgs])
self.rect = np.unique(s, axis=0).shape[0] == 1 # rect inference if all shapes equal
self.auto = auto and self.rect
self.transforms = transforms # optional
if not self.rect:
LOGGER.warning("WARNING ⚠️ Stream shapes differ. For optimal performance supply similarly-shaped streams.")
def update(self, i, cap, stream):
"""Reads frames from stream `i`, updating imgs array; handles stream reopening on signal loss."""
n, f = 0, self.frames[i] # frame number, frame array
while cap.isOpened() and n < f:
n += 1
cap.grab() # .read() = .grab() followed by .retrieve()
if n % self.vid_stride == 0:
success, im = cap.retrieve()
if success:
self.imgs[i] = im
else:
LOGGER.warning("WARNING ⚠️ Video stream unresponsive, please check your IP camera connection.")
self.imgs[i] = np.zeros_like(self.imgs[i])
cap.open(stream) # re-open stream if signal was lost
time.sleep(0.0) # wait time
def __iter__(self):
"""Resets and returns the iterator for iterating over video frames or images in a dataset."""
self.count = -1
return self
def __next__(self):
"""Iterates over video frames or images, halting on thread stop or 'q' key press, raising `StopIteration` when
done.
"""
self.count += 1
if not all(x.is_alive() for x in self.threads) or cv2.waitKey(1) == ord("q"): # q to quit
cv2.destroyAllWindows()
raise StopIteration
im0 = self.imgs.copy()
if self.transforms:
im = np.stack([self.transforms(x) for x in im0]) # transforms
else:
im = np.stack([letterbox(x, self.img_size, stride=self.stride, auto=self.auto)[0] for x in im0]) # resize
im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW
im = np.ascontiguousarray(im) # contiguous
return self.sources, im, im0, None, "", None
def __len__(self):
"""Returns the number of sources in the dataset, supporting up to 32 streams at 30 FPS over 30 years."""
return len(self.sources) # 1E12 frames = 32 streams at 30 FPS for 30 years
def img2label_paths(img_paths):
"""Generates label file paths from corresponding image file paths by replacing `/images/` with `/labels/` and
extension with `.txt`.
"""
sa, sb = f"{os.sep}images{os.sep}", f"{os.sep}labels{os.sep}" # /images/, /labels/ substrings
return [sb.join(x.rsplit(sa, 1)).rsplit(".", 1)[0] + ".txt" for x in img_paths]
class LoadImagesAndLabels(Dataset):
# YOLOv5 train_loader/val_loader, loads images and labels for training and validation
cache_version = 0.6 # dataset labels *.cache version
rand_interp_methods = [cv2.INTER_NEAREST, cv2.INTER_LINEAR, cv2.INTER_CUBIC, cv2.INTER_AREA, cv2.INTER_LANCZOS4]
def __init__(
self,
path,
img_size=640,
batch_size=16,
augment=False,
hyp=None,
rect=False,
image_weights=False,
cache_images=False,
single_cls=False,
stride=32,
pad=0.0,
min_items=0,
prefix="",
rank=-1,
seed=0,
):
self.img_size = img_size
self.augment = augment
self.hyp = hyp
self.image_weights = image_weights
self.rect = False if image_weights else rect
self.mosaic = self.augment and not self.rect # load 4 images at a time into a mosaic (only during training)
self.mosaic_border = [-img_size // 2, -img_size // 2]
self.stride = stride
self.path = path
self.albumentations = Albumentations(size=img_size) if augment else None
try:
f = [] # image files
for p in path if isinstance(path, list) else [path]:
p = Path(p) # os-agnostic
if p.is_dir(): # dir
f += glob.glob(str(p / "**" / "*.*"), recursive=True)
# f = list(p.rglob('*.*')) # pathlib
elif p.is_file(): # file
with open(p) as t:
t = t.read().strip().splitlines()
parent = str(p.parent) + os.sep
f += [x.replace("./", parent, 1) if x.startswith("./") else x for x in t] # to global path
# f += [p.parent / x.lstrip(os.sep) for x in t] # to global path (pathlib)
else:
raise FileNotFoundError(f"{prefix}{p} does not exist")
self.im_files = sorted(x.replace("/", os.sep) for x in f if x.split(".")[-1].lower() in IMG_FORMATS)
# self.img_files = sorted([x for x in f if x.suffix[1:].lower() in IMG_FORMATS]) # pathlib
assert self.im_files, f"{prefix}No images found"
except Exception as e:
raise Exception(f"{prefix}Error loading data from {path}: {e}\n{HELP_URL}") from e
# Check cache
self.label_files = img2label_paths(self.im_files) # labels
cache_path = (p if p.is_file() else Path(self.label_files[0]).parent).with_suffix(".cache")
try:
cache, exists = np.load(cache_path, allow_pickle=True).item(), True # load dict
assert cache["version"] == self.cache_version # matches current version
assert cache["hash"] == get_hash(self.label_files + self.im_files) # identical hash
except Exception:
cache, exists = self.cache_labels(cache_path, prefix), False # run cache ops
# Display cache
nf, nm, ne, nc, n = cache.pop("results") # found, missing, empty, corrupt, total
if exists and LOCAL_RANK in {-1, 0}:
d = f"Scanning {cache_path}... {nf} images, {nm + ne} backgrounds, {nc} corrupt"
tqdm(None, desc=prefix + d, total=n, initial=n, bar_format=TQDM_BAR_FORMAT) # display cache results
if cache["msgs"]:
LOGGER.info("\n".join(cache["msgs"])) # display warnings
assert nf > 0 or not augment, f"{prefix}No labels found in {cache_path}, can not start training. {HELP_URL}"
# Read cache
[cache.pop(k) for k in ("hash", "version", "msgs")] # remove items
labels, shapes, self.segments = zip(*cache.values())
nl = len(np.concatenate(labels, 0)) # number of labels
assert nl > 0 or not augment, f"{prefix}All labels empty in {cache_path}, can not start training. {HELP_URL}"
self.labels = list(labels)
self.shapes = np.array(shapes)
self.im_files = list(cache.keys()) # update
self.label_files = img2label_paths(cache.keys()) # update
# Filter images
if min_items:
include = np.array([len(x) >= min_items for x in self.labels]).nonzero()[0].astype(int)
LOGGER.info(f"{prefix}{n - len(include)}/{n} images filtered from dataset")
self.im_files = [self.im_files[i] for i in include]
self.label_files = [self.label_files[i] for i in include]
self.labels = [self.labels[i] for i in include]
self.segments = [self.segments[i] for i in include]
self.shapes = self.shapes[include] # wh
# Create indices
n = len(self.shapes) # number of images
bi = np.floor(np.arange(n) / batch_size).astype(int) # batch index
nb = bi[-1] + 1 # number of batches
self.batch = bi # batch index of image
self.n = n
self.indices = np.arange(n)
if rank > -1: # DDP indices (see: SmartDistributedSampler)
# force each rank (i.e. GPU process) to sample the same subset of data on every epoch
self.indices = self.indices[np.random.RandomState(seed=seed).permutation(n) % WORLD_SIZE == RANK]
# Update labels
include_class = [] # filter labels to include only these classes (optional)
self.segments = list(self.segments)
include_class_array = np.array(include_class).reshape(1, -1)
for i, (label, segment) in enumerate(zip(self.labels, self.segments)):
if include_class:
j = (label[:, 0:1] == include_class_array).any(1)
self.labels[i] = label[j]
if segment:
self.segments[i] = [segment[idx] for idx, elem in enumerate(j) if elem]
if single_cls: # single-class training, merge all classes into 0
self.labels[i][:, 0] = 0
# Rectangular Training
if self.rect:
# Sort by aspect ratio
s = self.shapes # wh
ar = s[:, 1] / s[:, 0] # aspect ratio
irect = ar.argsort()
self.im_files = [self.im_files[i] for i in irect]
self.label_files = [self.label_files[i] for i in irect]
self.labels = [self.labels[i] for i in irect]
self.segments = [self.segments[i] for i in irect]
self.shapes = s[irect] # wh
ar = ar[irect]
# Set training image shapes
shapes = [[1, 1]] * nb
for i in range(nb):
ari = ar[bi == i]
mini, maxi = ari.min(), ari.max()
if maxi < 1:
shapes[i] = [maxi, 1]
elif mini > 1:
shapes[i] = [1, 1 / mini]
self.batch_shapes = np.ceil(np.array(shapes) * img_size / stride + pad).astype(int) * stride
# Cache images into RAM/disk for faster training
if cache_images == "ram" and not self.check_cache_ram(prefix=prefix):
cache_images = False
self.ims = [None] * n
self.npy_files = [Path(f).with_suffix(".npy") for f in self.im_files]
if cache_images:
b, gb = 0, 1 << 30 # bytes of cached images, bytes per gigabytes
self.im_hw0, self.im_hw = [None] * n, [None] * n
fcn = self.cache_images_to_disk if cache_images == "disk" else self.load_image
results = ThreadPool(NUM_THREADS).imap(lambda i: (i, fcn(i)), self.indices)
pbar = tqdm(results, total=len(self.indices), bar_format=TQDM_BAR_FORMAT, disable=LOCAL_RANK > 0)
for i, x in pbar:
if cache_images == "disk":
b += self.npy_files[i].stat().st_size
else: # 'ram'
self.ims[i], self.im_hw0[i], self.im_hw[i] = x # im, hw_orig, hw_resized = load_image(self, i)
b += self.ims[i].nbytes * WORLD_SIZE
pbar.desc = f"{prefix}Caching images ({b / gb:.1f}GB {cache_images})"
pbar.close()
def check_cache_ram(self, safety_margin=0.1, prefix=""):
"""Checks if available RAM is sufficient for caching images, adjusting for a safety margin."""
b, gb = 0, 1 << 30 # bytes of cached images, bytes per gigabytes
n = min(self.n, 30) # extrapolate from 30 random images
for _ in range(n):
im = cv2.imread(random.choice(self.im_files)) # sample image
ratio = self.img_size / max(im.shape[0], im.shape[1]) # max(h, w) # ratio
b += im.nbytes * ratio ** 2
mem_required = b * self.n / n # GB required to cache dataset into RAM
mem = psutil.virtual_memory()
cache = mem_required * (1 + safety_margin) < mem.available # to cache or not to cache, that is the question
if not cache:
LOGGER.info(
f'{prefix}{mem_required / gb:.1f}GB RAM required, '
f'{mem.available / gb:.1f}/{mem.total / gb:.1f}GB available, '
f"{'caching images ✅' if cache else 'not caching images ⚠️'}"
)
return cache
def cache_labels(self, path=Path("./labels.cache"), prefix=""):
"""Caches dataset labels, verifies images, reads shapes, and tracks dataset integrity."""
x = {} # dict
nm, nf, ne, nc, msgs = 0, 0, 0, 0, [] # number missing, found, empty, corrupt, messages
desc = f"{prefix}Scanning {path.parent / path.stem}..."
with Pool(NUM_THREADS) as pool:
pbar = tqdm(
pool.imap(verify_image_label, zip(self.im_files, self.label_files, repeat(prefix))),
desc=desc,
total=len(self.im_files),
bar_format=TQDM_BAR_FORMAT,
)
for im_file, lb, shape, segments, nm_f, nf_f, ne_f, nc_f, msg in pbar:
nm += nm_f
nf += nf_f
ne += ne_f
nc += nc_f
if im_file:
x[im_file] = [lb, shape, segments]
if msg:
msgs.append(msg)
pbar.desc = f"{desc} {nf} images, {nm + ne} backgrounds, {nc} corrupt"
pbar.close()
if msgs:
LOGGER.info("\n".join(msgs))
if nf == 0:
LOGGER.warning(f"{prefix}WARNING ⚠️ No labels found in {path}. {HELP_URL}")
x["hash"] = get_hash(self.label_files + self.im_files)
x["results"] = nf, nm, ne, nc, len(self.im_files)
x["msgs"] = msgs # warnings
x["version"] = self.cache_version # cache version
try:
np.save(path, x) # save cache for next time
path.with_suffix(".cache.npy").rename(path) # remove .npy suffix
LOGGER.info(f"{prefix}New cache created: {path}")
except Exception as e:
LOGGER.warning(f"{prefix}WARNING ⚠️ Cache directory {path.parent} is not writeable: {e}") # not writeable
return x
def __len__(self):
"""Returns the number of images in the dataset."""
return len(self.im_files)
# def __iter__(self):
# self.count = -1
# print('ran dataset iter')
# #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
# return self
def __getitem__(self, index):
"""Fetches the dataset item at the given index, considering linear, shuffled, or weighted sampling."""
index = self.indices[index] # linear, shuffled, or image_weights
hyp = self.hyp
mosaic = self.mosaic and random.random() < hyp["mosaic"]
if mosaic:
# Load mosaic
img, labels = self.load_mosaic(index)
shapes = None
# MixUp augmentation
if random.random() < hyp["mixup"]:
img, labels = mixup(img, labels, *self.load_mosaic(random.choice(self.indices)))
else:
# Load image
img, (h0, w0), (h, w) = self.load_image(index)
# Letterbox
shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
labels = self.labels[index].copy()
if labels.size: # normalized xywh to pixel xyxy format
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
if self.augment:
img, labels = random_perspective(
img,
labels,
degrees=hyp["degrees"],
translate=hyp["translate"],
scale=hyp["scale"],
shear=hyp["shear"],
perspective=hyp["perspective"],
)
nl = len(labels) # number of labels
if nl:
labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
if self.augment:
# Albumentations
img, labels = self.albumentations(img, labels)
nl = len(labels) # update after albumentations
# HSV color-space
augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
# Flip up-down
if random.random() < hyp["flipud"]:
img = np.flipud(img)
if nl:
labels[:, 2] = 1 - labels[:, 2]
# Flip left-right
if random.random() < hyp["fliplr"]:
img = np.fliplr(img)
if nl:
labels[:, 1] = 1 - labels[:, 1]
# Cutouts
# labels = cutout(img, labels, p=0.5)
# nl = len(labels) # update after cutout
labels_out = torch.zeros((nl, 6))
if nl:
labels_out[:, 1:] = torch.from_numpy(labels)
# Convert
img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
img = np.ascontiguousarray(img)
return torch.from_numpy(img), labels_out, self.im_files[index], shapes
def load_image(self, i):
"""
Loads an image by index, returning the image, its original dimensions, and resized dimensions.
Returns (im, original hw, resized hw)
"""
im, f, fn = (
self.ims[i],
self.im_files[i],
self.npy_files[i],
)
if im is None: # not cached in RAM
if fn.exists(): # load npy
im = np.load(fn)
else: # read image
im = cv2.imread(f) # BGR
assert im is not None, f"Image Not Found {f}"
h0, w0 = im.shape[:2] # orig hw
r = self.img_size / max(h0, w0) # ratio
if r != 1: # if sizes are not equal
interp = cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA
im = cv2.resize(im, (math.ceil(w0 * r), math.ceil(h0 * r)), interpolation=interp)
return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
def cache_images_to_disk(self, i):
"""Saves an image to disk as an *.npy file for quicker loading, identified by index `i`."""
f = self.npy_files[i]
if not f.exists():
np.save(f.as_posix(), cv2.imread(self.im_files[i]))
def load_mosaic(self, index):
"""Loads a 4-image mosaic for YOLOv5, combining 1 selected and 3 random images, with labels and segments."""
labels4, segments4 = [], []
s = self.img_size
yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
random.shuffle(indices)
for i, index in enumerate(indices):
# Load image
img, _, (h, w) = self.load_image(index)
# place img in img4
if i == 0: # top left
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
elif i == 1: # top right
x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
elif i == 2: # bottom left
x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
elif i == 3: # bottom right
x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
padw = x1a - x1b
padh = y1a - y1b
# Labels
labels, segments = self.labels[index].copy(), self.segments[index].copy()
if labels.size:
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
labels4.append(labels)
segments4.extend(segments)
# Concat/clip labels
labels4 = np.concatenate(labels4, 0)
for x in (labels4[:, 1:], *segments4):
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
# img4, labels4 = replicate(img4, labels4) # replicate
# Augment
img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
img4, labels4 = random_perspective(
img4,
labels4,
segments4,
degrees=self.hyp["degrees"],
translate=self.hyp["translate"],
scale=self.hyp["scale"],
shear=self.hyp["shear"],
perspective=self.hyp["perspective"],
border=self.mosaic_border,
) # border to remove
return img4, labels4
def load_mosaic9(self, index):
"""Loads 1 image + 8 random images into a 9-image mosaic for augmented YOLOv5 training, returning labels and
segments.
"""
labels9, segments9 = [], []
s = self.img_size
indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
random.shuffle(indices)
hp, wp = -1, -1 # height, width previous
for i, index in enumerate(indices):
# Load image
img, _, (h, w) = self.load_image(index)
# place img in img9
if i == 0: # center
img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
h0, w0 = h, w
c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
elif i == 1: # top
c = s, s - h, s + w, s
elif i == 2: # top right
c = s + wp, s - h, s + wp + w, s
elif i == 3: # right
c = s + w0, s, s + w0 + w, s + h
elif i == 4: # bottom right
c = s + w0, s + hp, s + w0 + w, s + hp + h
elif i == 5: # bottom
c = s + w0 - w, s + h0, s + w0, s + h0 + h
elif i == 6: # bottom left
c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
elif i == 7: # left
c = s - w, s + h0 - h, s, s + h0
elif i == 8: # top left
c = s - w, s + h0 - hp - h, s, s + h0 - hp
padx, pady = c[:2]
x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords
# Labels
labels, segments = self.labels[index].copy(), self.segments[index].copy()
if labels.size:
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
labels9.append(labels)
segments9.extend(segments)
# Image
img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
hp, wp = h, w # height, width previous
# Offset
yc, xc = (int(random.uniform(0, s)) for _ in self.mosaic_border) # mosaic center x, y
img9 = img9[yc: yc + 2 * s, xc: xc + 2 * s]
# Concat/clip labels
labels9 = np.concatenate(labels9, 0)
labels9[:, [1, 3]] -= xc
labels9[:, [2, 4]] -= yc
c = np.array([xc, yc]) # centers
segments9 = [x - c for x in segments9]
for x in (labels9[:, 1:], *segments9):
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
# img9, labels9 = replicate(img9, labels9) # replicate
# Augment
img9, labels9, segments9 = copy_paste(img9, labels9, segments9, p=self.hyp["copy_paste"])
img9, labels9 = random_perspective(
img9,
labels9,
segments9,
degrees=self.hyp["degrees"],
translate=self.hyp["translate"],
scale=self.hyp["scale"],
shear=self.hyp["shear"],
perspective=self.hyp["perspective"],
border=self.mosaic_border,
) # border to remove
return img9, labels9
@staticmethod
def collate_fn(batch):
"""Batches images, labels, paths, and shapes, assigning unique indices to targets in merged label tensor."""
im, label, path, shapes = zip(*batch) # transposed
for i, lb in enumerate(label):
lb[:, 0] = i # add target image index for build_targets()
return torch.stack(im, 0), torch.cat(label, 0), path, shapes
@staticmethod
def collate_fn4(batch):
"""Bundles a batch's data by quartering the number of shapes and paths, preparing it for model input."""
im, label, path, shapes = zip(*batch) # transposed
n = len(shapes) // 4
im4, label4, path4, shapes4 = [], [], path[:n], shapes[:n]
ho = torch.tensor([[0.0, 0, 0, 1, 0, 0]])
wo = torch.tensor([[0.0, 0, 1, 0, 0, 0]])
s = torch.tensor([[1, 1, 0.5, 0.5, 0.5, 0.5]]) # scale
for i in range(n): # zidane torch.zeros(16,3,720,1280) # BCHW
i *= 4
if random.random() < 0.5:
im1 = F.interpolate(im[i].unsqueeze(0).float(), scale_factor=2.0, mode="bilinear", align_corners=False)[
0
].type(im[i].type())
lb = label[i]
else:
im1 = torch.cat((torch.cat((im[i], im[i + 1]), 1), torch.cat((im[i + 2], im[i + 3]), 1)), 2)
lb = torch.cat((label[i], label[i + 1] + ho, label[i + 2] + wo, label[i + 3] + ho + wo), 0) * s
im4.append(im1)
label4.append(lb)
for i, lb in enumerate(label4):
lb[:, 0] = i # add target image index for build_targets()
return torch.stack(im4, 0), torch.cat(label4, 0), path4, shapes4
# Ancillary functions --------------------------------------------------------------------------------------------------
def flatten_recursive(path=DATASETS_DIR / "coco128"):
"""Flattens a directory by copying all files from subdirectories to a new top-level directory, preserving
filenames.
"""
new_path = Path(f"{str(path)}_flat")
if os.path.exists(new_path):
shutil.rmtree(new_path) # delete output folder
os.makedirs(new_path) # make new output folder
for file in tqdm(glob.glob(f"{str(Path(path))}/**/*.*", recursive=True)):
shutil.copyfile(file, new_path / Path(file).name)
def extract_boxes(path=DATASETS_DIR / "coco128"):
"""
Converts a detection dataset to a classification dataset, creating a directory for each class and extracting
bounding boxes.
Example: from utils.dataloaders import *; extract_boxes()
"""
path = Path(path) # images dir
shutil.rmtree(path / "classification") if (path / "classification").is_dir() else None # remove existing
files = list(path.rglob("*.*"))
n = len(files) # number of files
for im_file in tqdm(files, total=n):
if im_file.suffix[1:] in IMG_FORMATS:
# image
im = cv2.imread(str(im_file))[..., ::-1] # BGR to RGB
h, w = im.shape[:2]
# labels
lb_file = Path(img2label_paths([str(im_file)])[0])
if Path(lb_file).exists():
with open(lb_file) as f:
lb = np.array([x.split() for x in f.read().strip().splitlines()], dtype=np.float32) # labels
for j, x in enumerate(lb):
c = int(x[0]) # class
f = (path / "classification") / f"{c}" / f"{path.stem}_{im_file.stem}_{j}.jpg" # new filename
if not f.parent.is_dir():
f.parent.mkdir(parents=True)
b = x[1:] * [w, h, w, h] # box
# b[2:] = b[2:].max() # rectangle to square
b[2:] = b[2:] * 1.2 + 3 # pad
b = xywh2xyxy(b.reshape(-1, 4)).ravel().astype(int)
b[[0, 2]] = np.clip(b[[0, 2]], 0, w) # clip boxes outside of image
b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
assert cv2.imwrite(str(f), im[b[1]: b[3], b[0]: b[2]]), f"box failure in {f}"
def autosplit(path=DATASETS_DIR / "coco128/images", weights=(0.9, 0.1, 0.0), annotated_only=False):
"""Autosplit a dataset into train/val/test splits and save path/autosplit_*.txt files
Usage: from utils.dataloaders import *; autosplit()
Arguments
path: Path to images directory
weights: Train, val, test weights (list, tuple)
annotated_only: Only use images with an annotated txt file
"""
path = Path(path) # images dir
files = sorted(x for x in path.rglob("*.*") if x.suffix[1:].lower() in IMG_FORMATS) # image files only
n = len(files) # number of files
random.seed(0) # for reproducibility
indices = random.choices([0, 1, 2], weights=weights, k=n) # assign each image to a split
txt = ["autosplit_train.txt", "autosplit_val.txt", "autosplit_test.txt"] # 3 txt files
for x in txt:
if (path.parent / x).exists():
(path.parent / x).unlink() # remove existing
print(f"Autosplitting images from {path}" + ", using *.txt labeled images only" * annotated_only)
for i, img in tqdm(zip(indices, files), total=n):
if not annotated_only or Path(img2label_paths([str(img)])[0]).exists(): # check label
with open(path.parent / txt[i], "a") as f:
f.write(f"./{img.relative_to(path.parent).as_posix()}" + "\n") # add image to txt file
def verify_image_label(args):
"""Verifies a single image-label pair, ensuring image format, size, and legal label values."""
im_file, lb_file, prefix = args
nm, nf, ne, nc, msg, segments = 0, 0, 0, 0, "", [] # number (missing, found, empty, corrupt), message, segments
try:
# verify images
im = Image.open(im_file)
im.verify() # PIL verify
shape = exif_size(im) # image size
assert (shape[0] > 9) & (shape[1] > 9), f"image size {shape} <10 pixels"
assert im.format.lower() in IMG_FORMATS, f"invalid image format {im.format}"
if im.format.lower() in ("jpg", "jpeg"):
with open(im_file, "rb") as f:
f.seek(-2, 2)
if f.read() != b"\xff\xd9": # corrupt JPEG
ImageOps.exif_transpose(Image.open(im_file)).save(im_file, "JPEG", subsampling=0, quality=100)
msg = f"{prefix}WARNING ⚠️ {im_file}: corrupt JPEG restored and saved"
# verify labels
if os.path.isfile(lb_file):
nf = 1 # label found
with open(lb_file) as f:
lb = [x.split() for x in f.read().strip().splitlines() if len(x)]
if any(len(x) > 6 for x in lb): # is segment
classes = np.array([x[0] for x in lb], dtype=np.float32)
segments = [np.array(x[1:], dtype=np.float32).reshape(-1, 2) for x in lb] # (cls, xy1...)
lb = np.concatenate((classes.reshape(-1, 1), segments2boxes(segments)), 1) # (cls, xywh)
lb = np.array(lb, dtype=np.float32)
nl = len(lb)
if nl:
assert lb.shape[1] == 5, f"labels require 5 columns, {lb.shape[1]} columns detected"
assert (lb >= 0).all(), f"negative label values {lb[lb < 0]}"
assert (lb[:, 1:] <= 1).all(), f"non-normalized or out of bounds coordinates {lb[:, 1:][lb[:, 1:] > 1]}"
_, i = np.unique(lb, axis=0, return_index=True)
if len(i) < nl: # duplicate row check
lb = lb[i] # remove duplicates
if segments:
segments = [segments[x] for x in i]
msg = f"{prefix}WARNING ⚠️ {im_file}: {nl - len(i)} duplicate labels removed"
else:
ne = 1 # label empty
lb = np.zeros((0, 5), dtype=np.float32)
else:
nm = 1 # label missing
lb = np.zeros((0, 5), dtype=np.float32)
return im_file, lb, shape, segments, nm, nf, ne, nc, msg
except Exception as e:
nc = 1
msg = f"{prefix}WARNING ⚠️ {im_file}: ignoring corrupt image/label: {e}"
return [None, None, None, None, nm, nf, ne, nc, msg]
class HUBDatasetStats:
"""
Class for generating HUB dataset JSON and `-hub` dataset directory.
Arguments
path: Path to data.yaml or data.zip (with data.yaml inside data.zip)
autodownload: Attempt to download dataset if not found locally
Usage
from utils.dataloaders import HUBDatasetStats
stats = HUBDatasetStats('coco128.yaml', autodownload=True) # usage 1
stats = HUBDatasetStats('path/to/coco128.zip') # usage 2
stats.get_json(save=False)
stats.process_images()
"""
def __init__(self, path="coco128.yaml", autodownload=False):
"""Initializes HUBDatasetStats with optional auto-download for datasets, given a path to dataset YAML or ZIP
file.
"""
zipped, data_dir, yaml_path = self._unzip(Path(path))
try:
with open(check_yaml(yaml_path), errors="ignore") as f:
data = yaml.safe_load(f) # data dict
if zipped:
data["path"] = data_dir
except Exception as e:
raise Exception("error/HUB/dataset_stats/yaml_load") from e
check_dataset(data, autodownload) # download dataset if missing
self.hub_dir = Path(data["path"] + "-hub")
self.im_dir = self.hub_dir / "images"
self.im_dir.mkdir(parents=True, exist_ok=True) # makes /images
self.stats = {"nc": data["nc"], "names": list(data["names"].values())} # statistics dictionary
self.data = data
@staticmethod
def _find_yaml(dir):
"""Finds and returns the path to a single '.yaml' file in the specified directory, preferring files that match
the directory name.
"""
files = list(dir.glob("*.yaml")) or list(dir.rglob("*.yaml")) # try root level first and then recursive
assert files, f"No *.yaml file found in {dir}"
if len(files) > 1:
files = [f for f in files if f.stem == dir.stem] # prefer *.yaml files that match dir name
assert files, f"Multiple *.yaml files found in {dir}, only 1 *.yaml file allowed"
assert len(files) == 1, f"Multiple *.yaml files found: {files}, only 1 *.yaml file allowed in {dir}"
return files[0]
def _unzip(self, path):
"""Unzips a .zip file at 'path', returning success status, unzipped directory, and path to YAML file within."""
if not str(path).endswith(".zip"): # path is data.yaml
return False, None, path
assert Path(path).is_file(), f"Error unzipping {path}, file not found"
unzip_file(path, path=path.parent)
dir = path.with_suffix("") # dataset directory == zip name
assert dir.is_dir(), f"Error unzipping {path}, {dir} not found. path/to/abc.zip MUST unzip to path/to/abc/"
return True, str(dir), self._find_yaml(dir) # zipped, data_dir, yaml_path
def _hub_ops(self, f, max_dim=1920):
"""Resizes and saves an image at reduced quality for web/app viewing, supporting both PIL and OpenCV."""
f_new = self.im_dir / Path(f).name # dataset-hub image filename
try: # use PIL
im = Image.open(f)
r = max_dim / max(im.height, im.width) # ratio
if r < 1.0: # image too large
im = im.resize((int(im.width * r), int(im.height * r)))
im.save(f_new, "JPEG", quality=50, optimize=True) # save
except Exception as e: # use OpenCV
LOGGER.info(f"WARNING ⚠️ HUB ops PIL failure {f}: {e}")
im = cv2.imread(f)
im_height, im_width = im.shape[:2]
r = max_dim / max(im_height, im_width) # ratio
if r < 1.0: # image too large
im = cv2.resize(im, (int(im_width * r), int(im_height * r)), interpolation=cv2.INTER_AREA)
cv2.imwrite(str(f_new), im)
def get_json(self, save=False, verbose=False):
"""Generates dataset JSON for Ultralytics HUB, optionally saves or prints it; save=bool, verbose=bool."""
def _round(labels):
"""Rounds class labels to integers and coordinates to 4 decimal places for improved label accuracy."""
return [[int(c), *(round(x, 4) for x in points)] for c, *points in labels]
for split in "train", "val", "test":
if self.data.get(split) is None:
self.stats[split] = None # i.e. no test set
continue
dataset = LoadImagesAndLabels(self.data[split]) # load dataset
x = np.array(
[
np.bincount(label[:, 0].astype(int), minlength=self.data["nc"])
for label in tqdm(dataset.labels, total=dataset.n, desc="Statistics")
]
) # shape(128x80)
self.stats[split] = {
"instance_stats": {"total": int(x.sum()), "per_class": x.sum(0).tolist()},
"image_stats": {
"total": dataset.n,
"unlabelled": int(np.all(x == 0, 1).sum()),
"per_class": (x > 0).sum(0).tolist(),
},
"labels": [{str(Path(k).name): _round(v.tolist())} for k, v in zip(dataset.im_files, dataset.labels)],
}
# Save, print and return
if save:
stats_path = self.hub_dir / "stats.json"
print(f"Saving {stats_path.resolve()}...")
with open(stats_path, "w") as f:
json.dump(self.stats, f) # save stats.json
if verbose:
print(json.dumps(self.stats, indent=2, sort_keys=False))
return self.stats
def process_images(self):
"""Compresses images for Ultralytics HUB across 'train', 'val', 'test' splits and saves to specified
directory.
"""
for split in "train", "val", "test":
if self.data.get(split) is None:
continue
dataset = LoadImagesAndLabels(self.data[split]) # load dataset
desc = f"{split} images"
for _ in tqdm(ThreadPool(NUM_THREADS).imap(self._hub_ops, dataset.im_files), total=dataset.n, desc=desc):
pass
print(f"Done. All images saved to {self.im_dir}")
return self.im_dir
# Classification dataloaders -------------------------------------------------------------------------------------------
class ClassificationDataset(torchvision.datasets.ImageFolder):
"""
YOLOv5 Classification Dataset.
Arguments
root: Dataset path
transform: torchvision transforms, used by default
album_transform: Albumentations transforms, used if installed
"""
def __init__(self, root, augment, imgsz, cache=False):
"""Initializes YOLOv5 Classification Dataset with optional caching, augmentations, and transforms for image
classification.
"""
super().__init__(root=root)
self.torch_transforms = classify_transforms(imgsz)
self.album_transforms = classify_albumentations(augment, imgsz) if augment else None
self.cache_ram = cache is True or cache == "ram"
self.cache_disk = cache == "disk"
self.samples = [list(x) + [Path(x[0]).with_suffix(".npy"), None] for x in self.samples] # file, index, npy, im
def __getitem__(self, i):
"""Fetches and transforms an image sample by index, supporting RAM/disk caching and Augmentations."""
f, j, fn, im = self.samples[i] # filename, index, filename.with_suffix('.npy'), image
if self.cache_ram and im is None:
im = self.samples[i][3] = cv2.imread(f)
elif self.cache_disk:
if not fn.exists(): # load npy
np.save(fn.as_posix(), cv2.imread(f))
im = np.load(fn)
else: # read image
im = cv2.imread(f) # BGR
if self.album_transforms:
sample = self.album_transforms(image=cv2.cvtColor(im, cv2.COLOR_BGR2RGB))["image"]
else:
sample = self.torch_transforms(im)
return sample, j
def create_classification_dataloader(
path, imgsz=224, batch_size=16, augment=True, cache=False, rank=-1, workers=8, shuffle=True
):
# Returns Dataloader object to be used with YOLOv5 Classifier
with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
dataset = ClassificationDataset(root=path, imgsz=imgsz, augment=augment, cache=cache)
batch_size = min(batch_size, len(dataset))
nd = torch.cuda.device_count()
nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers])
sampler = None if rank == -1 else distributed.DistributedSampler(dataset, shuffle=shuffle)
generator = torch.Generator()
generator.manual_seed(6148914691236517205 + RANK)
return InfiniteDataLoader(
dataset,
batch_size=batch_size,
shuffle=shuffle and sampler is None,
num_workers=nw,
sampler=sampler,
pin_memory=PIN_MEMORY,
worker_init_fn=seed_worker,
generator=generator,
) # or DataLoader(persistent_workers=True)
================================================
FILE: utils/docker/Dockerfile
================================================
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Builds ultralytics/yolov5:latest image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference
# Start FROM PyTorch image https://hub.docker.com/r/pytorch/pytorch
FROM pytorch/pytorch:2.0.0-cuda11.7-cudnn8-runtime
# Downloads to user config dir
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
# Install linux packages
ENV DEBIAN_FRONTEND noninteractive
RUN apt update
RUN TZ=Etc/UTC apt install -y tzdata
RUN apt install --no-install-recommends -y gcc git zip curl htop libgl1 libglib2.0-0 libpython3-dev gnupg
# RUN alias python=python3
# Security updates
# https://security.snyk.io/vuln/SNYK-UBUNTU1804-OPENSSL-3314796
RUN apt upgrade --no-install-recommends -y openssl
# Create working directory
RUN rm -rf /usr/src/app && mkdir -p /usr/src/app
WORKDIR /usr/src/app
# Copy contents
COPY . /usr/src/app
# Install pip packages
COPY requirements.txt .
RUN python3 -m pip install --upgrade pip wheel
RUN pip install --no-cache -r requirements.txt albumentations comet gsutil notebook \
coremltools onnx onnx-simplifier onnxruntime 'openvino-dev>=2023.0'
# tensorflow tensorflowjs \
# Set environment variables
ENV OMP_NUM_THREADS=1
# Cleanup
ENV DEBIAN_FRONTEND teletype
# Usage Examples -------------------------------------------------------------------------------------------------------
# Build and Push
# t=ultralytics/yolov5:latest && sudo docker build -f utils/docker/Dockerfile -t $t . && sudo docker push $t
# Pull and Run
# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all $t
# Pull and Run with local directory access
# t=ultralytics/yolov5:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all -v "$(pwd)"/datasets:/usr/src/datasets $t
# Kill all
# sudo docker kill $(sudo docker ps -q)
# Kill all image-based
# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/yolov5:latest)
# DockerHub tag update
# t=ultralytics/yolov5:latest tnew=ultralytics/yolov5:v6.2 && sudo docker pull $t && sudo docker tag $t $tnew && sudo docker push $tnew
# Clean up
# sudo docker system prune -a --volumes
# Update Ubuntu drivers
# https://www.maketecheasier.com/install-nvidia-drivers-ubuntu/
# DDP test
# python -m torch.distributed.run --nproc_per_node 2 --master_port 1 train.py --epochs 3
# GCP VM from Image
# docker.io/ultralytics/yolov5:latest
================================================
FILE: utils/docker/Dockerfile-arm64
================================================
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Builds ultralytics/yolov5:latest-arm64 image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
# Image is aarch64-compatible for Apple M1 and other ARM architectures i.e. Jetson Nano and Raspberry Pi
# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
FROM arm64v8/ubuntu:22.10
# Downloads to user config dir
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
# Install linux packages
ENV DEBIAN_FRONTEND noninteractive
RUN apt update
RUN TZ=Etc/UTC apt install -y tzdata
RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc libgl1 libglib2.0-0 libpython3-dev
# RUN alias python=python3
# Install pip packages
COPY requirements.txt .
RUN python3 -m pip install --upgrade pip wheel
RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
coremltools onnx onnxruntime
# tensorflow-aarch64 tensorflowjs \
# Create working directory
RUN mkdir -p /usr/src/app
WORKDIR /usr/src/app
# Copy contents
COPY . /usr/src/app
ENV DEBIAN_FRONTEND teletype
# Usage Examples -------------------------------------------------------------------------------------------------------
# Build and Push
# t=ultralytics/yolov5:latest-arm64 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t
# Pull and Run
# t=ultralytics/yolov5:latest-arm64 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
================================================
FILE: utils/docker/Dockerfile-cpu
================================================
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Builds ultralytics/yolov5:latest-cpu image on DockerHub https://hub.docker.com/r/ultralytics/yolov5
# Image is CPU-optimized for ONNX, OpenVINO and PyTorch YOLOv5 deployments
# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu
FROM ubuntu:23.10
# Downloads to user config dir
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/
# Install linux packages
# g++ required to build 'tflite_support' and 'lap' packages, libusb-1.0-0 required for 'tflite_support' package
RUN apt update \
&& apt install --no-install-recommends -y python3-pip git zip curl htop libgl1 libglib2.0-0 libpython3-dev gnupg g++ libusb-1.0-0
# RUN alias python=python3
# Remove python3.11/EXTERNALLY-MANAGED or use 'pip install --break-system-packages' avoid 'externally-managed-environment' Ubuntu nightly error
RUN rm -rf /usr/lib/python3.11/EXTERNALLY-MANAGED
# Install pip packages
COPY requirements.txt .
RUN python3 -m pip install --upgrade pip wheel
RUN pip install --no-cache -r requirements.txt albumentations gsutil notebook \
coremltools onnx onnx-simplifier onnxruntime 'openvino-dev>=2023.0' \
# tensorflow tensorflowjs \
--extra-index-url https://download.pytorch.org/whl/cpu
# Create working directory
RUN mkdir -p /usr/src/app
WORKDIR /usr/src/app
# Copy contents
COPY . /usr/src/app
# Usage Examples -------------------------------------------------------------------------------------------------------
# Build and Push
# t=ultralytics/yolov5:latest-cpu && sudo docker build -f utils/docker/Dockerfile-cpu -t $t . && sudo docker push $t
# Pull and Run
# t=ultralytics/yolov5:latest-cpu && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t
================================================
FILE: utils/downloads.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Download utils."""
import logging
import subprocess
import urllib
from pathlib import Path
import requests
import torch
def is_url(url, check=True):
"""Determines if a string is a URL and optionally checks its existence online, returning a boolean."""
try:
url = str(url)
result = urllib.parse.urlparse(url)
assert all([result.scheme, result.netloc]) # check if is url
return (urllib.request.urlopen(url).getcode() == 200) if check else True # check if exists online
except (AssertionError, urllib.request.HTTPError):
return False
def gsutil_getsize(url=""):
"""
Returns the size in bytes of a file at a Google Cloud Storage URL using `gsutil du`.
Returns 0 if the command fails or output is empty.
"""
output = subprocess.check_output(["gsutil", "du", url], shell=True, encoding="utf-8")
return int(output.split()[0]) if output else 0
def url_getsize(url="https://ultralytics.com/images/bus.jpg"):
"""Returns the size in bytes of a downloadable file at a given URL; defaults to -1 if not found."""
response = requests.head(url, allow_redirects=True)
return int(response.headers.get("content-length", -1))
def curl_download(url, filename, *, silent: bool = False) -> bool:
"""Download a file from a url to a filename using curl."""
silent_option = "sS" if silent else "" # silent
proc = subprocess.run(
[
"curl",
"-#",
f"-{silent_option}L",
url,
"--output",
filename,
"--retry",
"9",
"-C",
"-",
]
)
return proc.returncode == 0
def safe_download(file, url, url2=None, min_bytes=1e0, error_msg=""):
"""
Downloads a file from a URL (or alternate URL) to a specified path if file is above a minimum size.
Removes incomplete downloads.
"""
from utils.general import LOGGER
file = Path(file)
assert_msg = f"Downloaded file '{file}' does not exist or size is < min_bytes={min_bytes}"
try: # url1
LOGGER.info(f"Downloading {url} to {file}...")
torch.hub.download_url_to_file(url, str(file), progress=LOGGER.level <= logging.INFO)
assert file.exists() and file.stat().st_size > min_bytes, assert_msg # check
except Exception as e: # url2
if file.exists():
file.unlink() # remove partial downloads
LOGGER.info(f"ERROR: {e}\nRe-attempting {url2 or url} to {file}...")
# curl download, retry and resume on fail
curl_download(url2 or url, file)
finally:
if not file.exists() or file.stat().st_size < min_bytes: # check
if file.exists():
file.unlink() # remove partial downloads
LOGGER.info(f"ERROR: {assert_msg}\n{error_msg}")
LOGGER.info("")
def attempt_download(file, repo="ultralytics/yolov5", release="v7.0"):
"""Downloads a file from GitHub release assets or via direct URL if not found locally, supporting backup
versions.
"""
from utils.general import LOGGER
def github_assets(repository, version="latest"):
# Return GitHub repo tag (i.e. 'v7.0') and assets (i.e. ['yolov5s.pt', 'yolov5m.pt', ...])
if version != "latest":
version = f"tags/{version}" # i.e. tags/v7.0
response = requests.get(f"https://api.github.com/repos/{repository}/releases/{version}").json() # github api
return response["tag_name"], [x["name"] for x in response["assets"]] # tag, assets
file = Path(str(file).strip().replace("'", ""))
if not file.exists():
# URL specified
name = Path(urllib.parse.unquote(str(file))).name # decode '%2F' to '/' etc.
if str(file).startswith(("http:/", "https:/")): # download
url = str(file).replace(":/", "://") # Pathlib turns :// -> :/
file = name.split("?")[0] # parse authentication https://url.com/file.txt?auth...
if Path(file).is_file():
LOGGER.info(f"Found {url} locally at {file}") # file already exists
else:
safe_download(file=file, url=url, min_bytes=1e5)
return file
# GitHub assets
assets = [f"yolov5{size}{suffix}.pt" for size in "nsmlx" for suffix in ("", "6", "-cls", "-seg")] # default
try:
tag, assets = github_assets(repo, release)
except Exception:
try:
tag, assets = github_assets(repo) # latest release
except Exception:
try:
tag = subprocess.check_output("git tag", shell=True, stderr=subprocess.STDOUT).decode().split()[-1]
except Exception:
tag = release
if name in assets:
file.parent.mkdir(parents=True, exist_ok=True) # make parent dir (if required)
safe_download(
file,
url=f"https://github.com/{repo}/releases/download/{tag}/{name}",
min_bytes=1e5,
error_msg=f"{file} missing, try downloading from https://github.com/{repo}/releases/{tag}",
)
return str(file)
================================================
FILE: utils/flask_rest_api/README.md
================================================
# Flask REST API
[REST](https://en.wikipedia.org/wiki/Representational_state_transfer) [API](https://en.wikipedia.org/wiki/API)s are commonly used to expose Machine Learning (ML) models to other services. This folder contains an example REST API created using Flask to expose the YOLOv5s model from [PyTorch Hub](https://pytorch.org/hub/ultralytics_yolov5/).
## Requirements
[Flask](https://palletsprojects.com/p/flask/) is required. Install with:
```shell
$ pip install Flask
```
## Run
After Flask installation run:
```shell
$ python3 restapi.py --port 5000
```
Then use [curl](https://curl.se/) to perform a request:
```shell
$ curl -X POST -F image=@zidane.jpg 'http://localhost:5000/v1/object-detection/yolov5s'
```
The model inference results are returned as a JSON response:
```json
[
{
"class": 0,
"confidence": 0.8900438547,
"height": 0.9318675399,
"name": "person",
"width": 0.3264600933,
"xcenter": 0.7438579798,
"ycenter": 0.5207948685
},
{
"class": 0,
"confidence": 0.8440024257,
"height": 0.7155083418,
"name": "person",
"width": 0.6546785235,
"xcenter": 0.427829951,
"ycenter": 0.6334488392
},
{
"class": 27,
"confidence": 0.3771208823,
"height": 0.3902671337,
"name": "tie",
"width": 0.0696444362,
"xcenter": 0.3675483763,
"ycenter": 0.7991207838
},
{
"class": 27,
"confidence": 0.3527112305,
"height": 0.1540903747,
"name": "tie",
"width": 0.0336618312,
"xcenter": 0.7814827561,
"ycenter": 0.5065554976
}
]
```
An example python script to perform inference using [requests](https://docs.python-requests.org/en/master/) is given in `example_request.py`
================================================
FILE: utils/flask_rest_api/example_request.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Perform test request."""
import pprint
import requests
DETECTION_URL = "http://localhost:5000/v1/object-detection/yolov5s"
IMAGE = "zidane.jpg"
# Read image
with open(IMAGE, "rb") as f:
image_data = f.read()
response = requests.post(DETECTION_URL, files={"image": image_data}).json()
pprint.pprint(response)
================================================
FILE: utils/flask_rest_api/restapi.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Run a Flask REST API exposing one or more YOLOv5s models."""
import argparse
import io
import torch
from flask import Flask, request
from PIL import Image
app = Flask(__name__)
models = {}
DETECTION_URL = "/v1/object-detection/
 ## About ClearML
[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
🔨 Track every YOLOv5 training run in the experiment manager
🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
🔬 Get the very best mAP using ClearML Hyperparameter Optimization
🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
## About ClearML
[ClearML](https://cutt.ly/yolov5-tutorial-clearml) is an [open-source](https://github.com/allegroai/clearml) toolbox designed to save you time ⏱️.
🔨 Track every YOLOv5 training run in the experiment manager
🔧 Version and easily access your custom training data with the integrated ClearML Data Versioning Tool
🔦 Remotely train and monitor your YOLOv5 training runs using ClearML Agent
🔬 Get the very best mAP using ClearML Hyperparameter Optimization
🔭 Turn your newly trained YOLOv5 model into an API with just a few commands using ClearML Serving
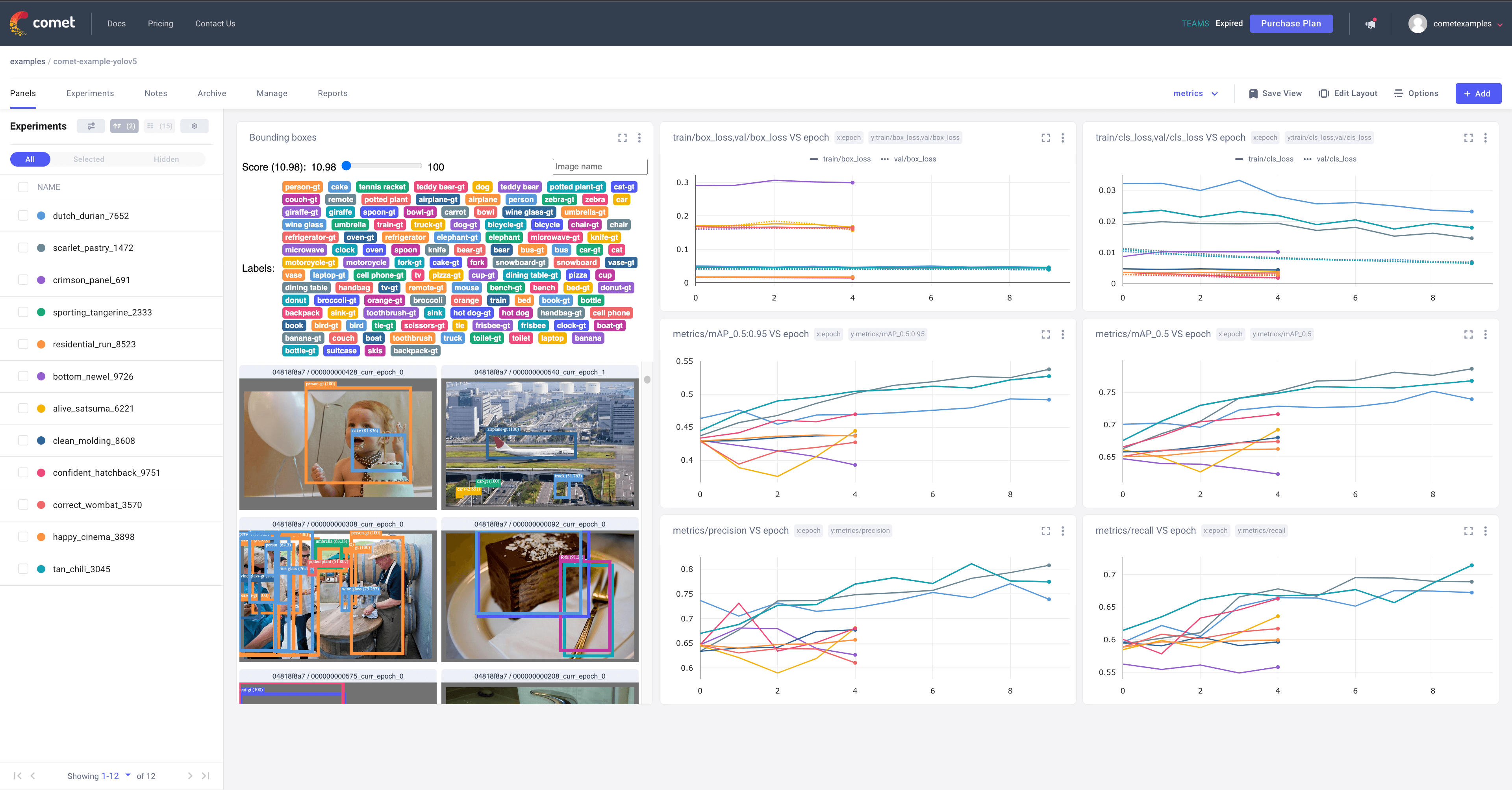 # Try out an Example!
Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
Or better yet, try it out yourself in this Colab Notebook
[](https://colab.research.google.com/github/comet-ml/comet-examples/blob/master/integrations/model-training/yolov5/notebooks/Comet_and_YOLOv5.ipynb)
# Log automatically
By default, Comet will log the following items
## Metrics
- Box Loss, Object Loss, Classification Loss for the training and validation data
- mAP_0.5, mAP_0.5:0.95 metrics for the validation data.
- Precision and Recall for the validation data
## Parameters
- Model Hyperparameters
- All parameters passed through the command line options
## Visualizations
- Confusion Matrix of the model predictions on the validation data
- Plots for the PR and F1 curves across all classes
- Correlogram of the Class Labels
# Configure Comet Logging
Comet can be configured to log additional data either through command line flags passed to the training script or through environment variables.
```shell
export COMET_MODE=online # Set whether to run Comet in 'online' or 'offline' mode. Defaults to online
export COMET_MODEL_NAME=
# Try out an Example!
Check out an example of a [completed run here](https://www.comet.com/examples/comet-example-yolov5/a0e29e0e9b984e4a822db2a62d0cb357?experiment-tab=chart&showOutliers=true&smoothing=0&transformY=smoothing&xAxis=step&utm_source=yolov5&utm_medium=partner&utm_campaign=partner_yolov5_2022&utm_content=github)
Or better yet, try it out yourself in this Colab Notebook
[](https://colab.research.google.com/github/comet-ml/comet-examples/blob/master/integrations/model-training/yolov5/notebooks/Comet_and_YOLOv5.ipynb)
# Log automatically
By default, Comet will log the following items
## Metrics
- Box Loss, Object Loss, Classification Loss for the training and validation data
- mAP_0.5, mAP_0.5:0.95 metrics for the validation data.
- Precision and Recall for the validation data
## Parameters
- Model Hyperparameters
- All parameters passed through the command line options
## Visualizations
- Confusion Matrix of the model predictions on the validation data
- Plots for the PR and F1 curves across all classes
- Correlogram of the Class Labels
# Configure Comet Logging
Comet can be configured to log additional data either through command line flags passed to the training script or through environment variables.
```shell
export COMET_MODE=online # Set whether to run Comet in 'online' or 'offline' mode. Defaults to online
export COMET_MODEL_NAME= You can preview the data directly in the Comet UI.
You can preview the data directly in the Comet UI.  Artifacts are versioned and also support adding metadata about the dataset. Comet will automatically log the metadata from your dataset `yaml` file
Artifacts are versioned and also support adding metadata about the dataset. Comet will automatically log the metadata from your dataset `yaml` file  ### Using a saved Artifact
If you would like to use a dataset from Comet Artifacts, set the `path` variable in your dataset `yaml` file to point to the following Artifact resource URL.
```
# contents of artifact.yaml file
path: "comet://
### Using a saved Artifact
If you would like to use a dataset from Comet Artifacts, set the `path` variable in your dataset `yaml` file to point to the following Artifact resource URL.
```
# contents of artifact.yaml file
path: "comet:// ## Resuming a Training Run
If your training run is interrupted for any reason, e.g. disrupted internet connection, you can resume the run using the `resume` flag and the Comet Run Path.
The Run Path has the following format `comet://
## Resuming a Training Run
If your training run is interrupted for any reason, e.g. disrupted internet connection, you can resume the run using the `resume` flag and the Comet Run Path.
The Run Path has the following format `comet://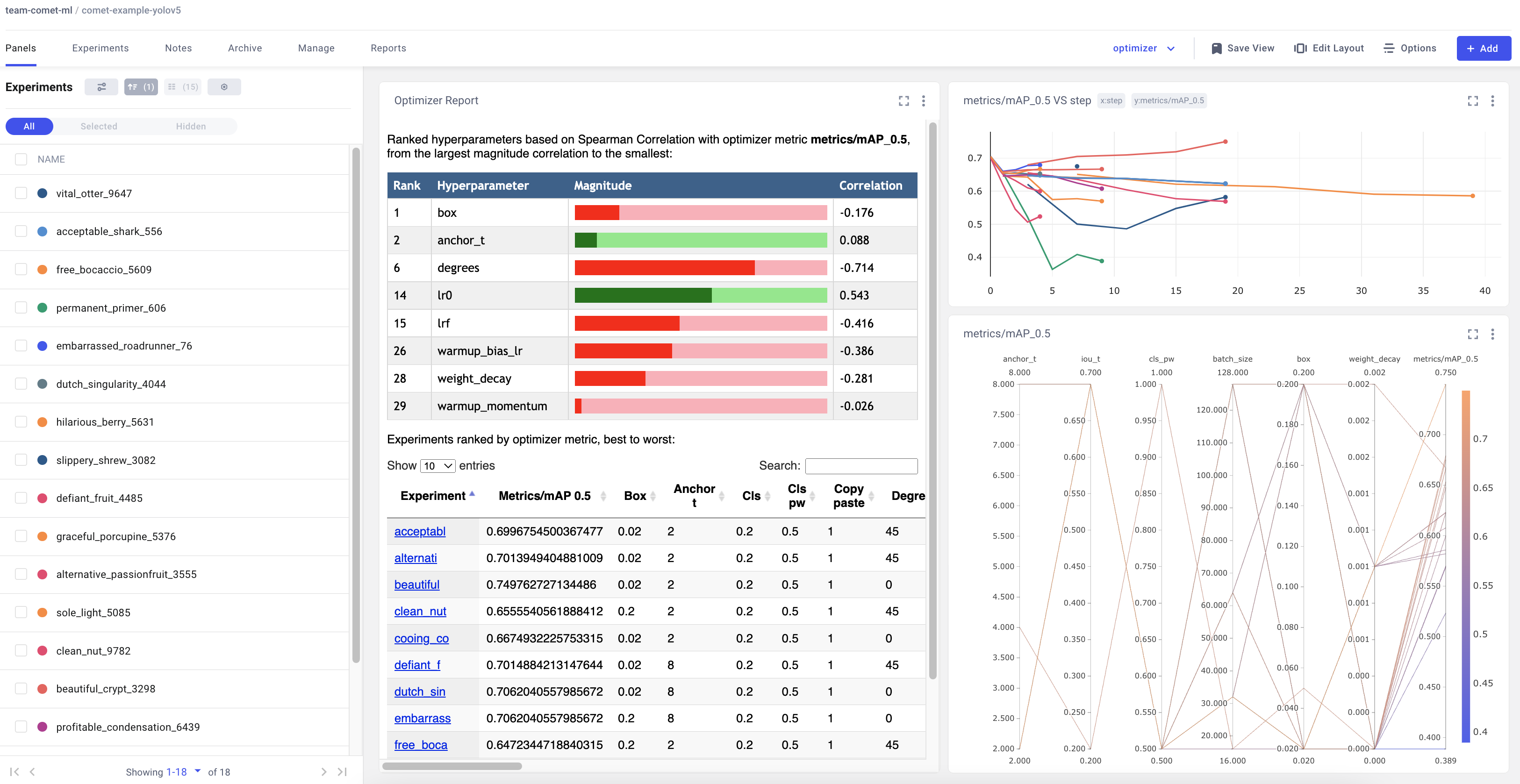 ================================================
FILE: utils/loggers/comet/__init__.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import glob
import json
import logging
import os
import sys
from pathlib import Path
logger = logging.getLogger(__name__)
FILE = Path(__file__).resolve()
ROOT = FILE.parents[3] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
try:
import comet_ml
# Project Configuration
config = comet_ml.config.get_config()
COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
except ImportError:
comet_ml = None
COMET_PROJECT_NAME = None
import PIL
import torch
import torchvision.transforms as T
import yaml
from utils.dataloaders import img2label_paths
from utils.general import check_dataset, scale_boxes, xywh2xyxy
from utils.metrics import box_iou
COMET_PREFIX = "comet://"
COMET_MODE = os.getenv("COMET_MODE", "online")
# Model Saving Settings
COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
# Dataset Artifact Settings
COMET_UPLOAD_DATASET = os.getenv("COMET_UPLOAD_DATASET", "false").lower() == "true"
# Evaluation Settings
COMET_LOG_CONFUSION_MATRIX = os.getenv("COMET_LOG_CONFUSION_MATRIX", "true").lower() == "true"
COMET_LOG_PREDICTIONS = os.getenv("COMET_LOG_PREDICTIONS", "true").lower() == "true"
COMET_MAX_IMAGE_UPLOADS = int(os.getenv("COMET_MAX_IMAGE_UPLOADS", 100))
# Confusion Matrix Settings
CONF_THRES = float(os.getenv("CONF_THRES", 0.001))
IOU_THRES = float(os.getenv("IOU_THRES", 0.6))
# Batch Logging Settings
COMET_LOG_BATCH_METRICS = os.getenv("COMET_LOG_BATCH_METRICS", "false").lower() == "true"
COMET_BATCH_LOGGING_INTERVAL = os.getenv("COMET_BATCH_LOGGING_INTERVAL", 1)
COMET_PREDICTION_LOGGING_INTERVAL = os.getenv("COMET_PREDICTION_LOGGING_INTERVAL", 1)
COMET_LOG_PER_CLASS_METRICS = os.getenv("COMET_LOG_PER_CLASS_METRICS", "false").lower() == "true"
RANK = int(os.getenv("RANK", -1))
to_pil = T.ToPILImage()
class CometLogger:
"""Log metrics, parameters, source code, models and much more with Comet."""
def __init__(self, opt, hyp, run_id=None, job_type="Training", **experiment_kwargs) -> None:
self.job_type = job_type
self.opt = opt
self.hyp = hyp
# Comet Flags
self.comet_mode = COMET_MODE
self.save_model = opt.save_period > -1
self.model_name = COMET_MODEL_NAME
# Batch Logging Settings
self.log_batch_metrics = COMET_LOG_BATCH_METRICS
self.comet_log_batch_interval = COMET_BATCH_LOGGING_INTERVAL
# Dataset Artifact Settings
self.upload_dataset = self.opt.upload_dataset or COMET_UPLOAD_DATASET
self.resume = self.opt.resume
# Default parameters to pass to Experiment objects
self.default_experiment_kwargs = {
"log_code": False,
"log_env_gpu": True,
"log_env_cpu": True,
"project_name": COMET_PROJECT_NAME,
}
self.default_experiment_kwargs.update(experiment_kwargs)
self.experiment = self._get_experiment(self.comet_mode, run_id)
self.experiment.set_name(self.opt.name)
self.data_dict = self.check_dataset(self.opt.data)
self.class_names = self.data_dict["names"]
self.num_classes = self.data_dict["nc"]
self.logged_images_count = 0
self.max_images = COMET_MAX_IMAGE_UPLOADS
if run_id is None:
self.experiment.log_other("Created from", "YOLOv5")
if not isinstance(self.experiment, comet_ml.OfflineExperiment):
workspace, project_name, experiment_id = self.experiment.url.split("/")[-3:]
self.experiment.log_other(
"Run Path",
f"{workspace}/{project_name}/{experiment_id}",
)
self.log_parameters(vars(opt))
self.log_parameters(self.opt.hyp)
self.log_asset_data(
self.opt.hyp,
name="hyperparameters.json",
metadata={"type": "hyp-config-file"},
)
self.log_asset(
f"{self.opt.save_dir}/opt.yaml",
metadata={"type": "opt-config-file"},
)
self.comet_log_confusion_matrix = COMET_LOG_CONFUSION_MATRIX
if hasattr(self.opt, "conf_thres"):
self.conf_thres = self.opt.conf_thres
else:
self.conf_thres = CONF_THRES
if hasattr(self.opt, "iou_thres"):
self.iou_thres = self.opt.iou_thres
else:
self.iou_thres = IOU_THRES
self.log_parameters({"val_iou_threshold": self.iou_thres, "val_conf_threshold": self.conf_thres})
self.comet_log_predictions = COMET_LOG_PREDICTIONS
if self.opt.bbox_interval == -1:
self.comet_log_prediction_interval = 1 if self.opt.epochs < 10 else self.opt.epochs // 10
else:
self.comet_log_prediction_interval = self.opt.bbox_interval
if self.comet_log_predictions:
self.metadata_dict = {}
self.logged_image_names = []
self.comet_log_per_class_metrics = COMET_LOG_PER_CLASS_METRICS
self.experiment.log_others(
{
"comet_mode": COMET_MODE,
"comet_max_image_uploads": COMET_MAX_IMAGE_UPLOADS,
"comet_log_per_class_metrics": COMET_LOG_PER_CLASS_METRICS,
"comet_log_batch_metrics": COMET_LOG_BATCH_METRICS,
"comet_log_confusion_matrix": COMET_LOG_CONFUSION_MATRIX,
"comet_model_name": COMET_MODEL_NAME,
}
)
# Check if running the Experiment with the Comet Optimizer
if hasattr(self.opt, "comet_optimizer_id"):
self.experiment.log_other("optimizer_id", self.opt.comet_optimizer_id)
self.experiment.log_other("optimizer_objective", self.opt.comet_optimizer_objective)
self.experiment.log_other("optimizer_metric", self.opt.comet_optimizer_metric)
self.experiment.log_other("optimizer_parameters", json.dumps(self.hyp))
def _get_experiment(self, mode, experiment_id=None):
"""Returns a new or existing Comet.ml experiment based on mode and optional experiment_id."""
if mode == "offline":
return (
comet_ml.ExistingOfflineExperiment(
previous_experiment=experiment_id,
**self.default_experiment_kwargs,
)
if experiment_id is not None
else comet_ml.OfflineExperiment(
**self.default_experiment_kwargs,
)
)
try:
if experiment_id is not None:
return comet_ml.ExistingExperiment(
previous_experiment=experiment_id,
**self.default_experiment_kwargs,
)
return comet_ml.Experiment(**self.default_experiment_kwargs)
except ValueError:
logger.warning(
"COMET WARNING: "
"Comet credentials have not been set. "
"Comet will default to offline logging. "
"Please set your credentials to enable online logging."
)
return self._get_experiment("offline", experiment_id)
return
def log_metrics(self, log_dict, **kwargs):
"""Logs metrics to the current experiment, accepting a dictionary of metric names and values."""
self.experiment.log_metrics(log_dict, **kwargs)
def log_parameters(self, log_dict, **kwargs):
"""Logs parameters to the current experiment, accepting a dictionary of parameter names and values."""
self.experiment.log_parameters(log_dict, **kwargs)
def log_asset(self, asset_path, **kwargs):
"""Logs a file or directory as an asset to the current experiment."""
self.experiment.log_asset(asset_path, **kwargs)
def log_asset_data(self, asset, **kwargs):
"""Logs in-memory data as an asset to the current experiment, with optional kwargs."""
self.experiment.log_asset_data(asset, **kwargs)
def log_image(self, img, **kwargs):
"""Logs an image to the current experiment with optional kwargs."""
self.experiment.log_image(img, **kwargs)
def log_model(self, path, opt, epoch, fitness_score, best_model=False):
"""Logs model checkpoint to experiment with path, options, epoch, fitness, and best model flag."""
if not self.save_model:
return
model_metadata = {
"fitness_score": fitness_score[-1],
"epochs_trained": epoch + 1,
"save_period": opt.save_period,
"total_epochs": opt.epochs,
}
model_files = glob.glob(f"{path}/*.pt")
for model_path in model_files:
name = Path(model_path).name
self.experiment.log_model(
self.model_name,
file_or_folder=model_path,
file_name=name,
metadata=model_metadata,
overwrite=True,
)
def check_dataset(self, data_file):
"""Validates the dataset configuration by loading the YAML file specified in `data_file`."""
with open(data_file) as f:
data_config = yaml.safe_load(f)
path = data_config.get("path")
if path and path.startswith(COMET_PREFIX):
path = data_config["path"].replace(COMET_PREFIX, "")
return self.download_dataset_artifact(path)
self.log_asset(self.opt.data, metadata={"type": "data-config-file"})
return check_dataset(data_file)
def log_predictions(self, image, labelsn, path, shape, predn):
"""Logs predictions with IOU filtering, given image, labels, path, shape, and predictions."""
if self.logged_images_count >= self.max_images:
return
detections = predn[predn[:, 4] > self.conf_thres]
iou = box_iou(labelsn[:, 1:], detections[:, :4])
mask, _ = torch.where(iou > self.iou_thres)
if len(mask) == 0:
return
filtered_detections = detections[mask]
filtered_labels = labelsn[mask]
image_id = path.split("/")[-1].split(".")[0]
image_name = f"{image_id}_curr_epoch_{self.experiment.curr_epoch}"
if image_name not in self.logged_image_names:
native_scale_image = PIL.Image.open(path)
self.log_image(native_scale_image, name=image_name)
self.logged_image_names.append(image_name)
metadata = [
{
"label": f"{self.class_names[int(cls)]}-gt",
"score": 100,
"box": {"x": xyxy[0], "y": xyxy[1], "x2": xyxy[2], "y2": xyxy[3]},
}
for cls, *xyxy in filtered_labels.tolist()
]
metadata.extend(
{
"label": f"{self.class_names[int(cls)]}",
"score": conf * 100,
"box": {"x": xyxy[0], "y": xyxy[1], "x2": xyxy[2], "y2": xyxy[3]},
}
for *xyxy, conf, cls in filtered_detections.tolist()
)
self.metadata_dict[image_name] = metadata
self.logged_images_count += 1
return
def preprocess_prediction(self, image, labels, shape, pred):
"""Processes prediction data, resizing labels and adding dataset metadata."""
nl, _ = labels.shape[0], pred.shape[0]
# Predictions
if self.opt.single_cls:
pred[:, 5] = 0
predn = pred.clone()
scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1])
labelsn = None
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
scale_boxes(image.shape[1:], tbox, shape[0], shape[1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1]) # native-space pred
return predn, labelsn
def add_assets_to_artifact(self, artifact, path, asset_path, split):
"""Adds image and label assets to a wandb artifact given dataset split and paths."""
img_paths = sorted(glob.glob(f"{asset_path}/*"))
label_paths = img2label_paths(img_paths)
for image_file, label_file in zip(img_paths, label_paths):
image_logical_path, label_logical_path = map(lambda x: os.path.relpath(x, path), [image_file, label_file])
try:
artifact.add(
image_file,
logical_path=image_logical_path,
metadata={"split": split},
)
artifact.add(
label_file,
logical_path=label_logical_path,
metadata={"split": split},
)
except ValueError as e:
logger.error("COMET ERROR: Error adding file to Artifact. Skipping file.")
logger.error(f"COMET ERROR: {e}")
continue
return artifact
def upload_dataset_artifact(self):
"""Uploads a YOLOv5 dataset as an artifact to the Comet.ml platform."""
dataset_name = self.data_dict.get("dataset_name", "yolov5-dataset")
path = str((ROOT / Path(self.data_dict["path"])).resolve())
metadata = self.data_dict.copy()
for key in ["train", "val", "test"]:
split_path = metadata.get(key)
if split_path is not None:
metadata[key] = split_path.replace(path, "")
artifact = comet_ml.Artifact(name=dataset_name, artifact_type="dataset", metadata=metadata)
for key in metadata.keys():
if key in ["train", "val", "test"]:
if isinstance(self.upload_dataset, str) and (key != self.upload_dataset):
continue
asset_path = self.data_dict.get(key)
if asset_path is not None:
artifact = self.add_assets_to_artifact(artifact, path, asset_path, key)
self.experiment.log_artifact(artifact)
return
def download_dataset_artifact(self, artifact_path):
"""Downloads a dataset artifact to a specified directory using the experiment's logged artifact."""
logged_artifact = self.experiment.get_artifact(artifact_path)
artifact_save_dir = str(Path(self.opt.save_dir) / logged_artifact.name)
logged_artifact.download(artifact_save_dir)
metadata = logged_artifact.metadata
data_dict = metadata.copy()
data_dict["path"] = artifact_save_dir
metadata_names = metadata.get("names")
if isinstance(metadata_names, dict):
data_dict["names"] = {int(k): v for k, v in metadata.get("names").items()}
elif isinstance(metadata_names, list):
data_dict["names"] = {int(k): v for k, v in zip(range(len(metadata_names)), metadata_names)}
else:
raise "Invalid 'names' field in dataset yaml file. Please use a list or dictionary"
return self.update_data_paths(data_dict)
def update_data_paths(self, data_dict):
"""Updates data paths in the dataset dictionary, defaulting 'path' to an empty string if not present."""
path = data_dict.get("path", "")
for split in ["train", "val", "test"]:
if data_dict.get(split):
split_path = data_dict.get(split)
data_dict[split] = (
f"{path}/{split_path}" if isinstance(split, str) else [f"{path}/{x}" for x in split_path]
)
return data_dict
def on_pretrain_routine_end(self, paths):
"""Called at the end of pretraining routine to handle paths if training is not being resumed."""
if self.opt.resume:
return
for path in paths:
self.log_asset(str(path))
if self.upload_dataset and not self.resume:
self.upload_dataset_artifact()
return
def on_train_start(self):
"""Logs hyperparameters at the start of training."""
self.log_parameters(self.hyp)
def on_train_epoch_start(self):
"""Called at the start of each training epoch."""
return
def on_train_epoch_end(self, epoch):
"""Updates the current epoch in the experiment tracking at the end of each epoch."""
self.experiment.curr_epoch = epoch
return
def on_train_batch_start(self):
"""Called at the start of each training batch."""
return
def on_train_batch_end(self, log_dict, step):
"""Callback function that updates and logs metrics at the end of each training batch if conditions are met."""
self.experiment.curr_step = step
if self.log_batch_metrics and (step % self.comet_log_batch_interval == 0):
self.log_metrics(log_dict, step=step)
return
def on_train_end(self, files, save_dir, last, best, epoch, results):
"""Logs metadata and optionally saves model files at the end of training."""
if self.comet_log_predictions:
curr_epoch = self.experiment.curr_epoch
self.experiment.log_asset_data(self.metadata_dict, "image-metadata.json", epoch=curr_epoch)
for f in files:
self.log_asset(f, metadata={"epoch": epoch})
self.log_asset(f"{save_dir}/results.csv", metadata={"epoch": epoch})
if not self.opt.evolve:
model_path = str(best if best.exists() else last)
name = Path(model_path).name
if self.save_model:
self.experiment.log_model(
self.model_name,
file_or_folder=model_path,
file_name=name,
overwrite=True,
)
# Check if running Experiment with Comet Optimizer
if hasattr(self.opt, "comet_optimizer_id"):
metric = results.get(self.opt.comet_optimizer_metric)
self.experiment.log_other("optimizer_metric_value", metric)
self.finish_run()
def on_val_start(self):
"""Called at the start of validation, currently a placeholder with no functionality."""
return
def on_val_batch_start(self):
"""Placeholder called at the start of a validation batch with no current functionality."""
return
def on_val_batch_end(self, batch_i, images, targets, paths, shapes, outputs):
"""Callback executed at the end of a validation batch, conditionally logs predictions to Comet ML."""
if not (self.comet_log_predictions and ((batch_i + 1) % self.comet_log_prediction_interval == 0)):
return
for si, pred in enumerate(outputs):
if len(pred) == 0:
continue
image = images[si]
labels = targets[targets[:, 0] == si, 1:]
shape = shapes[si]
path = paths[si]
predn, labelsn = self.preprocess_prediction(image, labels, shape, pred)
if labelsn is not None:
self.log_predictions(image, labelsn, path, shape, predn)
return
def on_val_end(self, nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix):
"""Logs per-class metrics to Comet.ml after validation if enabled and more than one class exists."""
if self.comet_log_per_class_metrics and self.num_classes > 1:
for i, c in enumerate(ap_class):
class_name = self.class_names[c]
self.experiment.log_metrics(
{
"mAP@.5": ap50[i],
"mAP@.5:.95": ap[i],
"precision": p[i],
"recall": r[i],
"f1": f1[i],
"true_positives": tp[i],
"false_positives": fp[i],
"support": nt[c],
},
prefix=class_name,
)
if self.comet_log_confusion_matrix:
epoch = self.experiment.curr_epoch
class_names = list(self.class_names.values())
class_names.append("background")
num_classes = len(class_names)
self.experiment.log_confusion_matrix(
matrix=confusion_matrix.matrix,
max_categories=num_classes,
labels=class_names,
epoch=epoch,
column_label="Actual Category",
row_label="Predicted Category",
file_name=f"confusion-matrix-epoch-{epoch}.json",
)
def on_fit_epoch_end(self, result, epoch):
"""Logs metrics at the end of each training epoch."""
self.log_metrics(result, epoch=epoch)
def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
"""Callback to save model checkpoints periodically if conditions are met."""
if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
self.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
def on_params_update(self, params):
"""Logs updated parameters during training."""
self.log_parameters(params)
def finish_run(self):
"""Ends the current experiment and logs its completion."""
self.experiment.end()
================================================
FILE: utils/loggers/comet/comet_utils.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import logging
import os
from urllib.parse import urlparse
try:
import comet_ml
except ImportError:
comet_ml = None
import yaml
logger = logging.getLogger(__name__)
COMET_PREFIX = "comet://"
COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
COMET_DEFAULT_CHECKPOINT_FILENAME = os.getenv("COMET_DEFAULT_CHECKPOINT_FILENAME", "last.pt")
def download_model_checkpoint(opt, experiment):
"""Downloads YOLOv5 model checkpoint from Comet ML experiment, updating `opt.weights` with download path."""
model_dir = f"{opt.project}/{experiment.name}"
os.makedirs(model_dir, exist_ok=True)
model_name = COMET_MODEL_NAME
model_asset_list = experiment.get_model_asset_list(model_name)
if len(model_asset_list) == 0:
logger.error(f"COMET ERROR: No checkpoints found for model name : {model_name}")
return
model_asset_list = sorted(
model_asset_list,
key=lambda x: x["step"],
reverse=True,
)
logged_checkpoint_map = {asset["fileName"]: asset["assetId"] for asset in model_asset_list}
resource_url = urlparse(opt.weights)
checkpoint_filename = resource_url.query
if checkpoint_filename:
asset_id = logged_checkpoint_map.get(checkpoint_filename)
else:
asset_id = logged_checkpoint_map.get(COMET_DEFAULT_CHECKPOINT_FILENAME)
checkpoint_filename = COMET_DEFAULT_CHECKPOINT_FILENAME
if asset_id is None:
logger.error(f"COMET ERROR: Checkpoint {checkpoint_filename} not found in the given Experiment")
return
try:
logger.info(f"COMET INFO: Downloading checkpoint {checkpoint_filename}")
asset_filename = checkpoint_filename
model_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
model_download_path = f"{model_dir}/{asset_filename}"
with open(model_download_path, "wb") as f:
f.write(model_binary)
opt.weights = model_download_path
except Exception as e:
logger.warning("COMET WARNING: Unable to download checkpoint from Comet")
logger.exception(e)
def set_opt_parameters(opt, experiment):
"""
Update the opts Namespace with parameters from Comet's ExistingExperiment when resuming a run.
Args:
opt (argparse.Namespace): Namespace of command line options
experiment (comet_ml.APIExperiment): Comet API Experiment object
"""
asset_list = experiment.get_asset_list()
resume_string = opt.resume
for asset in asset_list:
if asset["fileName"] == "opt.yaml":
asset_id = asset["assetId"]
asset_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
opt_dict = yaml.safe_load(asset_binary)
for key, value in opt_dict.items():
setattr(opt, key, value)
opt.resume = resume_string
# Save hyperparameters to YAML file
# Necessary to pass checks in training script
save_dir = f"{opt.project}/{experiment.name}"
os.makedirs(save_dir, exist_ok=True)
hyp_yaml_path = f"{save_dir}/hyp.yaml"
with open(hyp_yaml_path, "w") as f:
yaml.dump(opt.hyp, f)
opt.hyp = hyp_yaml_path
def check_comet_weights(opt):
"""
Downloads model weights from Comet and updates the weights path to point to saved weights location.
Args:
opt (argparse.Namespace): Command Line arguments passed
to YOLOv5 training script
Returns:
None/bool: Return True if weights are successfully downloaded
else return None
"""
if comet_ml is None:
return
if isinstance(opt.weights, str) and opt.weights.startswith(COMET_PREFIX):
api = comet_ml.API()
resource = urlparse(opt.weights)
experiment_path = f"{resource.netloc}{resource.path}"
experiment = api.get(experiment_path)
download_model_checkpoint(opt, experiment)
return True
return None
def check_comet_resume(opt):
"""
Restores run parameters to its original state based on the model checkpoint and logged Experiment parameters.
Args:
opt (argparse.Namespace): Command Line arguments passed
to YOLOv5 training script
Returns:
None/bool: Return True if the run is restored successfully
else return None
"""
if comet_ml is None:
return
if isinstance(opt.resume, str) and opt.resume.startswith(COMET_PREFIX):
api = comet_ml.API()
resource = urlparse(opt.resume)
experiment_path = f"{resource.netloc}{resource.path}"
experiment = api.get(experiment_path)
set_opt_parameters(opt, experiment)
download_model_checkpoint(opt, experiment)
return True
return None
================================================
FILE: utils/loggers/comet/hpo.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import argparse
import json
import logging
import os
import sys
from pathlib import Path
import comet_ml
logger = logging.getLogger(__name__)
FILE = Path(__file__).resolve()
ROOT = FILE.parents[3] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
from train import train
from utils.callbacks import Callbacks
from utils.general import increment_path
from utils.torch_utils import select_device
# Project Configuration
config = comet_ml.config.get_config()
COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
def get_args(known=False):
"""Parses command-line arguments for YOLOv5 training, supporting configuration of weights, data paths,
hyperparameters, and more.
"""
parser = argparse.ArgumentParser()
parser.add_argument("--weights", type=str, default=ROOT / "yolov5s.pt", help="initial weights path")
parser.add_argument("--cfg", type=str, default="", help="model.yaml path")
parser.add_argument("--data", type=str, default=ROOT / "data/coco128.yaml", help="dataset.yaml path")
parser.add_argument("--hyp", type=str, default=ROOT / "data/hyps/hyp.scratch-low.yaml", help="hyperparameters path")
parser.add_argument("--epochs", type=int, default=300, help="total training epochs")
parser.add_argument("--batch-size", type=int, default=16, help="total batch size for all GPUs, -1 for autobatch")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=640, help="train, val image size (pixels)")
parser.add_argument("--rect", action="store_true", help="rectangular training")
parser.add_argument("--resume", nargs="?", const=True, default=False, help="resume most recent training")
parser.add_argument("--nosave", action="store_true", help="only save final checkpoint")
parser.add_argument("--noval", action="store_true", help="only validate final epoch")
parser.add_argument("--noautoanchor", action="store_true", help="disable AutoAnchor")
parser.add_argument("--noplots", action="store_true", help="save no plot files")
parser.add_argument("--evolve", type=int, nargs="?", const=300, help="evolve hyperparameters for x generations")
parser.add_argument("--bucket", type=str, default="", help="gsutil bucket")
parser.add_argument("--cache", type=str, nargs="?", const="ram", help='--cache images in "ram" (default) or "disk"')
parser.add_argument("--image-weights", action="store_true", help="use weighted image selection for training")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--multi-scale", action="store_true", help="vary img-size +/- 50%%")
parser.add_argument("--single-cls", action="store_true", help="train multi-class data as single-class")
parser.add_argument("--optimizer", type=str, choices=["SGD", "Adam", "AdamW"], default="SGD", help="optimizer")
parser.add_argument("--sync-bn", action="store_true", help="use SyncBatchNorm, only available in DDP mode")
parser.add_argument("--workers", type=int, default=8, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--project", default=ROOT / "runs/train", help="save to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--quad", action="store_true", help="quad dataloader")
parser.add_argument("--cos-lr", action="store_true", help="cosine LR scheduler")
parser.add_argument("--label-smoothing", type=float, default=0.0, help="Label smoothing epsilon")
parser.add_argument("--patience", type=int, default=100, help="EarlyStopping patience (epochs without improvement)")
parser.add_argument("--freeze", nargs="+", type=int, default=[0], help="Freeze layers: backbone=10, first3=0 1 2")
parser.add_argument("--save-period", type=int, default=-1, help="Save checkpoint every x epochs (disabled if < 1)")
parser.add_argument("--seed", type=int, default=0, help="Global training seed")
parser.add_argument("--local_rank", type=int, default=-1, help="Automatic DDP Multi-GPU argument, do not modify")
# Weights & Biases arguments
parser.add_argument("--entity", default=None, help="W&B: Entity")
parser.add_argument("--upload_dataset", nargs="?", const=True, default=False, help='W&B: Upload data, "val" option')
parser.add_argument("--bbox_interval", type=int, default=-1, help="W&B: Set bounding-box image logging interval")
parser.add_argument("--artifact_alias", type=str, default="latest", help="W&B: Version of dataset artifact to use")
# Comet Arguments
parser.add_argument("--comet_optimizer_config", type=str, help="Comet: Path to a Comet Optimizer Config File.")
parser.add_argument("--comet_optimizer_id", type=str, help="Comet: ID of the Comet Optimizer sweep.")
parser.add_argument("--comet_optimizer_objective", type=str, help="Comet: Set to 'minimize' or 'maximize'.")
parser.add_argument("--comet_optimizer_metric", type=str, help="Comet: Metric to Optimize.")
parser.add_argument(
"--comet_optimizer_workers",
type=int,
default=1,
help="Comet: Number of Parallel Workers to use with the Comet Optimizer.",
)
return parser.parse_known_args()[0] if known else parser.parse_args()
def run(parameters, opt):
"""Executes YOLOv5 training with given hyperparameters and options, setting up device and training directories."""
hyp_dict = {k: v for k, v in parameters.items() if k not in ["epochs", "batch_size"]}
opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
opt.batch_size = parameters.get("batch_size")
opt.epochs = parameters.get("epochs")
device = select_device(opt.device, batch_size=opt.batch_size)
train(hyp_dict, opt, device, callbacks=Callbacks())
if __name__ == "__main__":
opt = get_args(known=True)
opt.weights = str(opt.weights)
opt.cfg = str(opt.cfg)
opt.data = str(opt.data)
opt.project = str(opt.project)
optimizer_id = os.getenv("COMET_OPTIMIZER_ID")
if optimizer_id is None:
with open(opt.comet_optimizer_config) as f:
optimizer_config = json.load(f)
optimizer = comet_ml.Optimizer(optimizer_config)
else:
optimizer = comet_ml.Optimizer(optimizer_id)
opt.comet_optimizer_id = optimizer.id
status = optimizer.status()
opt.comet_optimizer_objective = status["spec"]["objective"]
opt.comet_optimizer_metric = status["spec"]["metric"]
logger.info("COMET INFO: Starting Hyperparameter Sweep")
for parameter in optimizer.get_parameters():
run(parameter["parameters"], opt)
================================================
FILE: utils/loggers/wandb/__init__.py
================================================
================================================
FILE: utils/loggers/wandb/wandb_utils.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# WARNING ⚠️ wandb is deprecated and will be removed in future release.
# See supported integrations at https://github.com/ultralytics/yolov5#integrations
import logging
import os
import sys
from contextlib import contextmanager
from pathlib import Path
from utils.general import LOGGER, colorstr
FILE = Path(__file__).resolve()
ROOT = FILE.parents[3] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
RANK = int(os.getenv("RANK", -1))
DEPRECATION_WARNING = (
f"{colorstr('wandb')}: WARNING ⚠️ wandb is deprecated and will be removed in a future release. "
f'See supported integrations at https://github.com/ultralytics/yolov5#integrations.'
)
try:
import wandb
assert hasattr(wandb, "__version__") # verify package import not local dir
LOGGER.warning(DEPRECATION_WARNING)
except (ImportError, AssertionError):
wandb = None
class WandbLogger:
"""
Log training runs, datasets, models, and predictions to Weights & Biases.
This logger sends information to W&B at wandb.ai. By default, this information includes hyperparameters, system
configuration and metrics, model metrics, and basic data metrics and analyses.
By providing additional command line arguments to train.py, datasets, models and predictions can also be logged.
For more on how this logger is used, see the Weights & Biases documentation:
https://docs.wandb.com/guides/integrations/yolov5
"""
def __init__(self, opt, run_id=None, job_type="Training"):
"""
- Initialize WandbLogger instance
- Upload dataset if opt.upload_dataset is True
- Setup training processes if job_type is 'Training'
arguments:
opt (namespace) -- Commandline arguments for this run
run_id (str) -- Run ID of W&B run to be resumed
job_type (str) -- To set the job_type for this run
"""
# Pre-training routine --
self.job_type = job_type
self.wandb, self.wandb_run = wandb, wandb.run if wandb else None
self.val_artifact, self.train_artifact = None, None
self.train_artifact_path, self.val_artifact_path = None, None
self.result_artifact = None
self.val_table, self.result_table = None, None
self.max_imgs_to_log = 16
self.data_dict = None
if self.wandb:
self.wandb_run = wandb.run or wandb.init(
config=opt,
resume="allow",
project="YOLOv5" if opt.project == "runs/train" else Path(opt.project).stem,
entity=opt.entity,
name=opt.name if opt.name != "exp" else None,
job_type=job_type,
id=run_id,
allow_val_change=True,
)
if self.wandb_run and self.job_type == "Training":
if isinstance(opt.data, dict):
# This means another dataset manager has already processed the dataset info (e.g. ClearML)
# and they will have stored the already processed dict in opt.data
self.data_dict = opt.data
self.setup_training(opt)
def setup_training(self, opt):
"""
Setup the necessary processes for training YOLO models:
- Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
- Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
- Setup log_dict, initialize bbox_interval
arguments:
opt (namespace) -- commandline arguments for this run
"""
self.log_dict, self.current_epoch = {}, 0
self.bbox_interval = opt.bbox_interval
if isinstance(opt.resume, str):
model_dir, _ = self.download_model_artifact(opt)
if model_dir:
self.weights = Path(model_dir) / "last.pt"
config = self.wandb_run.config
opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = (
str(self.weights),
config.save_period,
config.batch_size,
config.bbox_interval,
config.epochs,
config.hyp,
config.imgsz,
)
if opt.bbox_interval == -1:
self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
if opt.evolve or opt.noplots:
self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
def log_model(self, path, opt, epoch, fitness_score, best_model=False):
"""
Log the model checkpoint as W&B artifact.
arguments:
path (Path) -- Path of directory containing the checkpoints
opt (namespace) -- Command line arguments for this run
epoch (int) -- Current epoch number
fitness_score (float) -- fitness score for current epoch
best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
"""
model_artifact = wandb.Artifact(
f"run_{wandb.run.id}_model",
type="model",
metadata={
"original_url": str(path),
"epochs_trained": epoch + 1,
"save period": opt.save_period,
"project": opt.project,
"total_epochs": opt.epochs,
"fitness_score": fitness_score,
},
)
model_artifact.add_file(str(path / "last.pt"), name="last.pt")
wandb.log_artifact(
model_artifact,
aliases=[
"latest",
"last",
f"epoch {str(self.current_epoch)}",
"best" if best_model else "",
],
)
LOGGER.info(f"Saving model artifact on epoch {epoch + 1}")
def val_one_image(self, pred, predn, path, names, im):
"""Evaluates model prediction for a single image, returning metrics and visualizations."""
pass
def log(self, log_dict):
"""
Save the metrics to the logging dictionary.
arguments:
log_dict (Dict) -- metrics/media to be logged in current step
"""
if self.wandb_run:
for key, value in log_dict.items():
self.log_dict[key] = value
def end_epoch(self):
"""
Commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
arguments:
best_result (boolean): Boolean representing if the result of this evaluation is best or not
"""
if self.wandb_run:
with all_logging_disabled():
try:
wandb.log(self.log_dict)
except BaseException as e:
LOGGER.info(
f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
)
self.wandb_run.finish()
self.wandb_run = None
self.log_dict = {}
def finish_run(self):
"""Log metrics if any and finish the current W&B run."""
if self.wandb_run:
if self.log_dict:
with all_logging_disabled():
wandb.log(self.log_dict)
wandb.run.finish()
LOGGER.warning(DEPRECATION_WARNING)
@contextmanager
def all_logging_disabled(highest_level=logging.CRITICAL):
"""source - https://gist.github.com/simon-weber/7853144
A context manager that will prevent any logging messages triggered during the body from being processed.
:param highest_level: the maximum logging level in use.
This would only need to be changed if a custom level greater than CRITICAL is defined.
"""
previous_level = logging.root.manager.disable
logging.disable(highest_level)
try:
yield
finally:
logging.disable(previous_level)
================================================
FILE: utils/loss.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Loss functions."""
import torch
import torch.nn as nn
from utils.metrics import bbox_iou
from utils.torch_utils import de_parallel
def smooth_BCE(eps=0.1):
"""Returns label smoothing BCE targets for reducing overfitting; pos: `1.0 - 0.5*eps`, neg: `0.5*eps`. For details see https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441"""
return 1.0 - 0.5 * eps, 0.5 * eps
class BCEBlurWithLogitsLoss(nn.Module):
# BCEwithLogitLoss() with reduced missing label effects.
def __init__(self, alpha=0.05):
"""Initializes a modified BCEWithLogitsLoss with reduced missing label effects, taking optional alpha smoothing
parameter.
"""
super().__init__()
self.loss_fcn = nn.BCEWithLogitsLoss(reduction="none") # must be nn.BCEWithLogitsLoss()
self.alpha = alpha
def forward(self, pred, true):
"""Computes modified BCE loss for YOLOv5 with reduced missing label effects, taking pred and true tensors,
returns mean loss.
"""
loss = self.loss_fcn(pred, true)
pred = torch.sigmoid(pred) # prob from logits
dx = pred - true # reduce only missing label effects
# dx = (pred - true).abs() # reduce missing label and false label effects
alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
loss *= alpha_factor
return loss.mean()
class FocalLoss(nn.Module):
# Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
"""Initializes FocalLoss with specified loss function, gamma, and alpha values; modifies loss reduction to
'none'.
"""
super().__init__()
self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
self.gamma = gamma
self.alpha = alpha
self.reduction = loss_fcn.reduction
self.loss_fcn.reduction = "none" # required to apply FL to each element
def forward(self, pred, true):
"""Calculates the focal loss between predicted and true labels using a modified BCEWithLogitsLoss."""
loss = self.loss_fcn(pred, true)
# p_t = torch.exp(-loss)
# loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
# TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
pred_prob = torch.sigmoid(pred) # prob from logits
p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
modulating_factor = (1.0 - p_t) ** self.gamma
loss *= alpha_factor * modulating_factor
if self.reduction == "mean":
return loss.mean()
elif self.reduction == "sum":
return loss.sum()
else: # 'none'
return loss
class QFocalLoss(nn.Module):
# Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
"""Initializes Quality Focal Loss with given loss function, gamma, alpha; modifies reduction to 'none'."""
super().__init__()
self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
self.gamma = gamma
self.alpha = alpha
self.reduction = loss_fcn.reduction
self.loss_fcn.reduction = "none" # required to apply FL to each element
def forward(self, pred, true):
"""Computes the focal loss between `pred` and `true` using BCEWithLogitsLoss, adjusting for imbalance with
`gamma` and `alpha`.
"""
loss = self.loss_fcn(pred, true)
pred_prob = torch.sigmoid(pred) # prob from logits
alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
modulating_factor = torch.abs(true - pred_prob) ** self.gamma
loss *= alpha_factor * modulating_factor
if self.reduction == "mean":
return loss.mean()
elif self.reduction == "sum":
return loss.sum()
else: # 'none'
return loss
class ComputeLoss:
sort_obj_iou = False
# Compute losses
def __init__(self, model, autobalance=False):
"""Initializes ComputeLoss with model and autobalance option, autobalances losses if True."""
device = next(model.parameters()).device # get model device
h = model.hyp # hyperparameters
# Define criteria
BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["cls_pw"]], device=device))
BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["obj_pw"]], device=device))
# Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
self.cp, self.cn = smooth_BCE(eps=h.get("label_smoothing", 0.0)) # positive, negative BCE targets
# Focal loss
g = h["fl_gamma"] # focal loss gamma
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
m = de_parallel(model).model[-1] # Detect() module
self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
self.na = m.na # number of anchors
self.nc = m.nc # number of classes
self.nl = m.nl # number of layers
self.anchors = m.anchors
self.device = device
def __call__(self, p, targets): # predictions, targets
"""Performs forward pass, calculating class, box, and object loss for given predictions and targets."""
lcls = torch.zeros(1, device=self.device) # class loss
lbox = torch.zeros(1, device=self.device) # box loss
lobj = torch.zeros(1, device=self.device) # object loss
tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
# Losses
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
n = b.shape[0] # number of targets
if n:
# pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
# Regression
pxy = pxy.sigmoid() * 2 - 0.5
pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
# Objectness
iou = iou.detach().clamp(0).type(tobj.dtype)
if self.sort_obj_iou:
j = iou.argsort()
b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
if self.gr < 1:
iou = (1.0 - self.gr) + self.gr * iou
tobj[b, a, gj, gi] = iou # iou ratio
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
t = torch.full_like(pcls, self.cn, device=self.device) # targets
t[range(n), tcls[i]] = self.cp
lcls += self.BCEcls(pcls, t) # BCE
# Append targets to text file
# with open('targets.txt', 'a') as file:
# [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
obji = self.BCEobj(pi[..., 4], tobj)
lobj += obji * self.balance[i] # obj loss
if self.autobalance:
self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
if self.autobalance:
self.balance = [x / self.balance[self.ssi] for x in self.balance]
lbox *= self.hyp["box"]
lobj *= self.hyp["obj"]
lcls *= self.hyp["cls"]
bs = tobj.shape[0] # batch size
return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
def build_targets(self, p, targets):
"""Prepares model targets from input targets (image,class,x,y,w,h) for loss computation, returning class, box,
indices, and anchors.
"""
na, nt = self.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch = [], [], [], []
gain = torch.ones(7, device=self.device) # normalized to gridspace gain
ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
g = 0.5 # bias
off = (
torch.tensor(
[
[0, 0],
[1, 0],
[0, 1],
[-1, 0],
[0, -1], # j,k,l,m
# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
],
device=self.device,
).float()
* g
) # offsets
for i in range(self.nl):
anchors, shape = self.anchors[i], p[i].shape
gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
# Match targets to anchors
t = targets * gain # shape(3,n,7)
if nt:
# Matches
r = t[..., 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1 / r).max(2)[0] < self.hyp["anchor_t"] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filter
# Offsets
gxy = t[:, 2:4] # grid xy
gxi = gain[[2, 3]] - gxy # inverse
j, k = ((gxy % 1 < g) & (gxy > 1)).T
l, m = ((gxi % 1 < g) & (gxi > 1)).T
j = torch.stack((torch.ones_like(j), j, k, l, m))
t = t.repeat((5, 1, 1))[j]
offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
else:
t = targets[0]
offsets = 0
# Define
bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
gij = (gxy - offsets).long()
gi, gj = gij.T # grid indices
# Append
indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
anch.append(anchors[a]) # anchors
tcls.append(c) # class
return tcls, tbox, indices, anch
================================================
FILE: utils/metrics.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Model validation metrics."""
import math
import warnings
from pathlib import Path
import matplotlib.pyplot as plt
import numpy as np
import torch
from utils import TryExcept, threaded
def fitness(x):
"""Calculates fitness of a model using weighted sum of metrics P, R, mAP@0.5, mAP@0.5:0.95."""
w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
return (x[:, :4] * w).sum(1)
def smooth(y, f=0.05):
"""Applies box filter smoothing to array `y` with fraction `f`, yielding a smoothed array."""
nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
p = np.ones(nf // 2) # ones padding
yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
return np.convolve(yp, np.ones(nf) / nf, mode="valid") # y-smoothed
def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir=".", names=(), eps=1e-16, prefix=""):
"""
Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
tp: True positives (nparray, nx1 or nx10).
conf: Objectness value from 0-1 (nparray).
pred_cls: Predicted object classes (nparray).
target_cls: True object classes (nparray).
plot: Plot precision-recall curve at mAP@0.5
save_dir: Plot save directory
# Returns
The average precision as computed in py-faster-rcnn.
"""
# Sort by objectness
i = np.argsort(-conf)
tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
# Find unique classes
unique_classes, nt = np.unique(target_cls, return_counts=True)
nc = unique_classes.shape[0] # number of classes, number of detections
# Create Precision-Recall curve and compute AP for each class
px, py = np.linspace(0, 1, 1000), [] # for plotting
ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
for ci, c in enumerate(unique_classes):
i = pred_cls == c
n_l = nt[ci] # number of labels
n_p = i.sum() # number of predictions
if n_p == 0 or n_l == 0:
continue
# Accumulate FPs and TPs
fpc = (1 - tp[i]).cumsum(0)
tpc = tp[i].cumsum(0)
# Recall
recall = tpc / (n_l + eps) # recall curve
r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
# Precision
precision = tpc / (tpc + fpc) # precision curve
p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
# AP from recall-precision curve
for j in range(tp.shape[1]):
ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
if plot and j == 0:
py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
# Compute F1 (harmonic mean of precision and recall)
f1 = 2 * p * r / (p + r + eps)
names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
names = dict(enumerate(names)) # to dict
if plot:
plot_pr_curve(px, py, ap, Path(save_dir) / f"{prefix}PR_curve.png", names)
plot_mc_curve(px, f1, Path(save_dir) / f"{prefix}F1_curve.png", names, ylabel="F1")
plot_mc_curve(px, p, Path(save_dir) / f"{prefix}P_curve.png", names, ylabel="Precision")
plot_mc_curve(px, r, Path(save_dir) / f"{prefix}R_curve.png", names, ylabel="Recall")
i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
p, r, f1 = p[:, i], r[:, i], f1[:, i]
tp = (r * nt).round() # true positives
fp = (tp / (p + eps) - tp).round() # false positives
return tp, fp, p, r, f1, ap, unique_classes.astype(int)
def compute_ap(recall, precision):
"""Compute the average precision, given the recall and precision curves
# Arguments
recall: The recall curve (list)
precision: The precision curve (list)
# Returns
Average precision, precision curve, recall curve
"""
# Append sentinel values to beginning and end
mrec = np.concatenate(([0.0], recall, [1.0]))
mpre = np.concatenate(([1.0], precision, [0.0]))
# Compute the precision envelope
mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
# Integrate area under curve
method = "interp" # methods: 'continuous', 'interp'
if method == "interp":
x = np.linspace(0, 1, 101) # 101-point interp (COCO)
ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
else: # 'continuous'
i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
return ap, mpre, mrec
class ConfusionMatrix:
# Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
def __init__(self, nc, conf=0.25, iou_thres=0.45):
"""Initializes ConfusionMatrix with given number of classes, confidence, and IoU threshold."""
self.matrix = np.zeros((nc + 1, nc + 1))
self.nc = nc # number of classes
self.conf = conf
self.iou_thres = iou_thres
def process_batch(self, detections, labels):
"""
Return intersection-over-union (Jaccard index) of boxes.
Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
Arguments:
detections (Array[N, 6]), x1, y1, x2, y2, conf, class
labels (Array[M, 5]), class, x1, y1, x2, y2
Returns:
None, updates confusion matrix accordingly
"""
if detections is None:
gt_classes = labels.int()
for gc in gt_classes:
self.matrix[self.nc, gc] += 1 # background FN
return
detections = detections[detections[:, 4] > self.conf]
gt_classes = labels[:, 0].int()
detection_classes = detections[:, 5].int()
iou = box_iou(labels[:, 1:], detections[:, :4])
x = torch.where(iou > self.iou_thres)
if x[0].shape[0]:
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
if x[0].shape[0] > 1:
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
else:
matches = np.zeros((0, 3))
n = matches.shape[0] > 0
m0, m1, _ = matches.transpose().astype(int)
for i, gc in enumerate(gt_classes):
j = m0 == i
if n and sum(j) == 1:
self.matrix[detection_classes[m1[j]], gc] += 1 # correct
else:
self.matrix[self.nc, gc] += 1 # true background
if n:
for i, dc in enumerate(detection_classes):
if not any(m1 == i):
self.matrix[dc, self.nc] += 1 # predicted background
def tp_fp(self):
"""Calculates true positives (tp) and false positives (fp) excluding the background class from the confusion
matrix.
"""
tp = self.matrix.diagonal() # true positives
fp = self.matrix.sum(1) - tp # false positives
# fn = self.matrix.sum(0) - tp # false negatives (missed detections)
return tp[:-1], fp[:-1] # remove background class
@TryExcept("WARNING ⚠️ ConfusionMatrix plot failure")
def plot(self, normalize=True, save_dir="", names=()):
"""Plots confusion matrix using seaborn, optional normalization; can save plot to specified directory."""
import seaborn as sn
array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1e-9) if normalize else 1) # normalize columns
array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
nc, nn = self.nc, len(names) # number of classes, names
sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
ticklabels = (names + ["background"]) if labels else "auto"
with warnings.catch_warnings():
warnings.simplefilter("ignore") # suppress empty matrix RuntimeWarning: All-NaN slice encountered
sn.heatmap(
array,
ax=ax,
annot=nc < 30,
annot_kws={"size": 8},
cmap="Blues",
fmt=".2f",
square=True,
vmin=0.0,
xticklabels=ticklabels,
yticklabels=ticklabels,
).set_facecolor((1, 1, 1))
ax.set_xlabel("True")
ax.set_ylabel("Predicted")
ax.set_title("Confusion Matrix")
fig.savefig(Path(save_dir) / "confusion_matrix.png", dpi=250)
plt.close(fig)
def print(self):
"""Prints the confusion matrix row-wise, with each class and its predictions separated by spaces."""
for i in range(self.nc + 1):
print(" ".join(map(str, self.matrix[i])))
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
"""
Calculates IoU, GIoU, DIoU, or CIoU between two boxes, supporting xywh/xyxy formats.
Input shapes are box1(1,4) to box2(n,4).
"""
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * (
b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)
).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
# IoU
iou = inter / union
if CIoU or DIoU or GIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw**2 + ch**2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi**2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
def box_iou(box1, box2, eps=1e-7):
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
"""
Return intersection-over-union (Jaccard index) of boxes.
Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
Arguments:
box1 (Tensor[N, 4])
box2 (Tensor[M, 4])
Returns:
iou (Tensor[N, M]): the NxM matrix containing the pairwise
IoU values for every element in boxes1 and boxes2
"""
# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
(a1, a2), (b1, b2) = box1.unsqueeze(1).chunk(2, 2), box2.unsqueeze(0).chunk(2, 2)
inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
# IoU = inter / (area1 + area2 - inter)
return inter / ((a2 - a1).prod(2) + (b2 - b1).prod(2) - inter + eps)
def bbox_ioa(box1, box2, eps=1e-7):
"""
Returns the intersection over box2 area given box1, box2.
Boxes are x1y1x2y2
box1: np.array of shape(4)
box2: np.array of shape(nx4)
returns: np.array of shape(n)
"""
# Get the coordinates of bounding boxes
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
# Intersection area
inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * (
np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)
).clip(0)
# box2 area
box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
# Intersection over box2 area
return inter_area / box2_area
def wh_iou(wh1, wh2, eps=1e-7):
"""Calculates the Intersection over Union (IoU) for two sets of widths and heights; `wh1` and `wh2` should be nx2
and mx2 tensors.
"""
wh1 = wh1[:, None] # [N,1,2]
wh2 = wh2[None] # [1,M,2]
inter = torch.min(wh1, wh2).prod(2) # [N,M]
return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
# Plots ----------------------------------------------------------------------------------------------------------------
@threaded
def plot_pr_curve(px, py, ap, save_dir=Path("pr_curve.png"), names=()):
"""Plots precision-recall curve, optionally per class, saving to `save_dir`; `px`, `py` are lists, `ap` is Nx2
array, `names` optional.
"""
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
py = np.stack(py, axis=1)
if 0 < len(names) < 21: # display per-class legend if < 21 classes
for i, y in enumerate(py.T):
ax.plot(px, y, linewidth=1, label=f"{names[i]} {ap[i, 0]:.3f}") # plot(recall, precision)
else:
ax.plot(px, py, linewidth=1, color="grey") # plot(recall, precision)
ax.plot(px, py.mean(1), linewidth=3, color="blue", label="all classes %.3f mAP@0.5" % ap[:, 0].mean())
ax.set_xlabel("Recall")
ax.set_ylabel("Precision")
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
ax.set_title("Precision-Recall Curve")
fig.savefig(save_dir, dpi=250)
plt.close(fig)
@threaded
def plot_mc_curve(px, py, save_dir=Path("mc_curve.png"), names=(), xlabel="Confidence", ylabel="Metric"):
"""Plots a metric-confidence curve for model predictions, supporting per-class visualization and smoothing."""
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
if 0 < len(names) < 21: # display per-class legend if < 21 classes
for i, y in enumerate(py):
ax.plot(px, y, linewidth=1, label=f"{names[i]}") # plot(confidence, metric)
else:
ax.plot(px, py.T, linewidth=1, color="grey") # plot(confidence, metric)
y = smooth(py.mean(0), 0.05)
ax.plot(px, y, linewidth=3, color="blue", label=f"all classes {y.max():.2f} at {px[y.argmax()]:.3f}")
ax.set_xlabel(xlabel)
ax.set_ylabel(ylabel)
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
ax.set_title(f"{ylabel}-Confidence Curve")
fig.savefig(save_dir, dpi=250)
plt.close(fig)
================================================
FILE: utils/plots.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Plotting utils."""
import contextlib
import math
import os
from copy import copy
from pathlib import Path
import cv2
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import seaborn as sn
import torch
from PIL import Image, ImageDraw
from scipy.ndimage.filters import gaussian_filter1d
from ultralytics.utils.plotting import Annotator
from utils import TryExcept, threaded
from utils.general import LOGGER, clip_boxes, increment_path, xywh2xyxy, xyxy2xywh
from utils.metrics import fitness
# Settings
RANK = int(os.getenv("RANK", -1))
matplotlib.rc("font", **{"size": 11})
matplotlib.use("Agg") # for writing to files only
class Colors:
# Ultralytics color palette https://ultralytics.com/
def __init__(self):
"""
Initializes the Colors class with a palette derived from Ultralytics color scheme, converting hex codes to RGB.
Colors derived from `hex = matplotlib.colors.TABLEAU_COLORS.values()`.
"""
hexs = (
"FF3838",
"FF9D97",
"FF701F",
"FFB21D",
"CFD231",
"48F90A",
"92CC17",
"3DDB86",
"1A9334",
"00D4BB",
"2C99A8",
"00C2FF",
"344593",
"6473FF",
"0018EC",
"8438FF",
"520085",
"CB38FF",
"FF95C8",
"FF37C7",
)
self.palette = [self.hex2rgb(f"#{c}") for c in hexs]
self.n = len(self.palette)
def __call__(self, i, bgr=False):
"""Returns color from palette by index `i`, in BGR format if `bgr=True`, else RGB; `i` is an integer index."""
c = self.palette[int(i) % self.n]
return (c[2], c[1], c[0]) if bgr else c
@staticmethod
def hex2rgb(h):
"""Converts hexadecimal color `h` to an RGB tuple (PIL-compatible) with order (R, G, B)."""
return tuple(int(h[1 + i : 1 + i + 2], 16) for i in (0, 2, 4))
colors = Colors() # create instance for 'from utils.plots import colors'
def feature_visualization(x, module_type, stage, n=32, save_dir=Path("runs/detect/exp")):
"""
x: Features to be visualized
module_type: Module type
stage: Module stage within model
n: Maximum number of feature maps to plot
save_dir: Directory to save results
"""
if ("Detect" not in module_type) and (
"Segment" not in module_type
): # 'Detect' for Object Detect task,'Segment' for Segment task
batch, channels, height, width = x.shape # batch, channels, height, width
if height > 1 and width > 1:
f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
n = min(n, channels) # number of plots
fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
ax = ax.ravel()
plt.subplots_adjust(wspace=0.05, hspace=0.05)
for i in range(n):
ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
ax[i].axis("off")
LOGGER.info(f"Saving {f}... ({n}/{channels})")
plt.savefig(f, dpi=300, bbox_inches="tight")
plt.close()
np.save(str(f.with_suffix(".npy")), x[0].cpu().numpy()) # npy save
def hist2d(x, y, n=100):
"""
Generates a logarithmic 2D histogram, useful for visualizing label or evolution distributions.
Used in used in labels.png and evolve.png.
"""
xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
return np.log(hist[xidx, yidx])
def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
"""Applies a low-pass Butterworth filter to `data` with specified `cutoff`, `fs`, and `order`."""
from scipy.signal import butter, filtfilt
# https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
def butter_lowpass(cutoff, fs, order):
nyq = 0.5 * fs
normal_cutoff = cutoff / nyq
return butter(order, normal_cutoff, btype="low", analog=False)
b, a = butter_lowpass(cutoff, fs, order=order)
return filtfilt(b, a, data) # forward-backward filter
def output_to_target(output, max_det=300):
"""Converts YOLOv5 model output to [batch_id, class_id, x, y, w, h, conf] format for plotting, limiting detections
to `max_det`.
"""
targets = []
for i, o in enumerate(output):
box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
j = torch.full((conf.shape[0], 1), i)
targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
return torch.cat(targets, 0).numpy()
@threaded
def plot_images(images, targets, paths=None, fname="images.jpg", names=None):
"""Plots an image grid with labels from YOLOv5 predictions or targets, saving to `fname`."""
if isinstance(images, torch.Tensor):
images = images.cpu().float().numpy()
if isinstance(targets, torch.Tensor):
targets = targets.cpu().numpy()
max_size = 1920 # max image size
max_subplots = 16 # max image subplots, i.e. 4x4
bs, _, h, w = images.shape # batch size, _, height, width
bs = min(bs, max_subplots) # limit plot images
ns = np.ceil(bs**0.5) # number of subplots (square)
if np.max(images[0]) <= 1:
images *= 255 # de-normalise (optional)
# Build Image
mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
for i, im in enumerate(images):
if i == max_subplots: # if last batch has fewer images than we expect
break
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
im = im.transpose(1, 2, 0)
mosaic[y : y + h, x : x + w, :] = im
# Resize (optional)
scale = max_size / ns / max(h, w)
if scale < 1:
h = math.ceil(scale * h)
w = math.ceil(scale * w)
mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
# Annotate
fs = int((h + w) * ns * 0.01) # font size
annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
for i in range(i + 1):
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
if paths:
annotator.text([x + 5, y + 5], text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
if len(targets) > 0:
ti = targets[targets[:, 0] == i] # image targets
boxes = xywh2xyxy(ti[:, 2:6]).T
classes = ti[:, 1].astype("int")
labels = ti.shape[1] == 6 # labels if no conf column
conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
if boxes.shape[1]:
if boxes.max() <= 1.01: # if normalized with tolerance 0.01
boxes[[0, 2]] *= w # scale to pixels
boxes[[1, 3]] *= h
elif scale < 1: # absolute coords need scale if image scales
boxes *= scale
boxes[[0, 2]] += x
boxes[[1, 3]] += y
for j, box in enumerate(boxes.T.tolist()):
cls = classes[j]
color = colors(cls)
cls = names[cls] if names else cls
if labels or conf[j] > 0.25: # 0.25 conf thresh
label = f"{cls}" if labels else f"{cls} {conf[j]:.1f}"
annotator.box_label(box, label, color=color)
annotator.im.save(fname) # save
def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=""):
"""Plots learning rate schedule for given optimizer and scheduler, saving plot to `save_dir`."""
optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
y = []
for _ in range(epochs):
scheduler.step()
y.append(optimizer.param_groups[0]["lr"])
plt.plot(y, ".-", label="LR")
plt.xlabel("epoch")
plt.ylabel("LR")
plt.grid()
plt.xlim(0, epochs)
plt.ylim(0)
plt.savefig(Path(save_dir) / "LR.png", dpi=200)
plt.close()
def plot_val_txt():
"""
Plots 2D and 1D histograms of bounding box centers from 'val.txt' using matplotlib, saving as 'hist2d.png' and
'hist1d.png'.
Example: from utils.plots import *; plot_val()
"""
x = np.loadtxt("val.txt", dtype=np.float32)
box = xyxy2xywh(x[:, :4])
cx, cy = box[:, 0], box[:, 1]
fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
ax.set_aspect("equal")
plt.savefig("hist2d.png", dpi=300)
fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
ax[0].hist(cx, bins=600)
ax[1].hist(cy, bins=600)
plt.savefig("hist1d.png", dpi=200)
def plot_targets_txt():
"""
Plots histograms of object detection targets from 'targets.txt', saving the figure as 'targets.jpg'.
Example: from utils.plots import *; plot_targets_txt()
"""
x = np.loadtxt("targets.txt", dtype=np.float32).T
s = ["x targets", "y targets", "width targets", "height targets"]
fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
ax = ax.ravel()
for i in range(4):
ax[i].hist(x[i], bins=100, label=f"{x[i].mean():.3g} +/- {x[i].std():.3g}")
ax[i].legend()
ax[i].set_title(s[i])
plt.savefig("targets.jpg", dpi=200)
def plot_val_study(file="", dir="", x=None):
"""
Plots validation study results from 'study*.txt' files in a directory or a specific file, comparing model
performance and speed.
Example: from utils.plots import *; plot_val_study()
"""
save_dir = Path(file).parent if file else Path(dir)
plot2 = False # plot additional results
if plot2:
ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
# for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
for f in sorted(save_dir.glob("study*.txt")):
y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
x = np.arange(y.shape[1]) if x is None else np.array(x)
if plot2:
s = ["P", "R", "mAP@.5", "mAP@.5:.95", "t_preprocess (ms/img)", "t_inference (ms/img)", "t_NMS (ms/img)"]
for i in range(7):
ax[i].plot(x, y[i], ".-", linewidth=2, markersize=8)
ax[i].set_title(s[i])
j = y[3].argmax() + 1
ax2.plot(
y[5, 1:j],
y[3, 1:j] * 1e2,
".-",
linewidth=2,
markersize=8,
label=f.stem.replace("study_coco_", "").replace("yolo", "YOLO"),
)
ax2.plot(
1e3 / np.array([209, 140, 97, 58, 35, 18]),
[34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
"k.-",
linewidth=2,
markersize=8,
alpha=0.25,
label="EfficientDet",
)
ax2.grid(alpha=0.2)
ax2.set_yticks(np.arange(20, 60, 5))
ax2.set_xlim(0, 57)
ax2.set_ylim(25, 55)
ax2.set_xlabel("GPU Speed (ms/img)")
ax2.set_ylabel("COCO AP val")
ax2.legend(loc="lower right")
f = save_dir / "study.png"
print(f"Saving {f}...")
plt.savefig(f, dpi=300)
@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
def plot_labels(labels, names=(), save_dir=Path("")):
"""Plots dataset labels, saving correlogram and label images, handles classes, and visualizes bounding boxes."""
LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
nc = int(c.max() + 1) # number of classes
x = pd.DataFrame(b.transpose(), columns=["x", "y", "width", "height"])
# seaborn correlogram
sn.pairplot(x, corner=True, diag_kind="auto", kind="hist", diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
plt.savefig(save_dir / "labels_correlogram.jpg", dpi=200)
plt.close()
# matplotlib labels
matplotlib.use("svg") # faster
ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
with contextlib.suppress(Exception): # color histogram bars by class
[y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
ax[0].set_ylabel("instances")
if 0 < len(names) < 30:
ax[0].set_xticks(range(len(names)))
ax[0].set_xticklabels(list(names.values()), rotation=90, fontsize=10)
else:
ax[0].set_xlabel("classes")
sn.histplot(x, x="x", y="y", ax=ax[2], bins=50, pmax=0.9)
sn.histplot(x, x="width", y="height", ax=ax[3], bins=50, pmax=0.9)
# rectangles
labels[:, 1:3] = 0.5 # center
labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
for cls, *box in labels[:1000]:
ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
ax[1].imshow(img)
ax[1].axis("off")
for a in [0, 1, 2, 3]:
for s in ["top", "right", "left", "bottom"]:
ax[a].spines[s].set_visible(False)
plt.savefig(save_dir / "labels.jpg", dpi=200)
matplotlib.use("Agg")
plt.close()
def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path("images.jpg")):
"""Displays a grid of images with optional labels and predictions, saving to a file."""
from utils.augmentations import denormalize
names = names or [f"class{i}" for i in range(1000)]
blocks = torch.chunk(
denormalize(im.clone()).cpu().float(), len(im), dim=0
) # select batch index 0, block by channels
n = min(len(blocks), nmax) # number of plots
m = min(8, round(n**0.5)) # 8 x 8 default
fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
ax = ax.ravel() if m > 1 else [ax]
# plt.subplots_adjust(wspace=0.05, hspace=0.05)
for i in range(n):
ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
ax[i].axis("off")
if labels is not None:
s = names[labels[i]] + (f"—{names[pred[i]]}" if pred is not None else "")
ax[i].set_title(s, fontsize=8, verticalalignment="top")
plt.savefig(f, dpi=300, bbox_inches="tight")
plt.close()
if verbose:
LOGGER.info(f"Saving {f}")
if labels is not None:
LOGGER.info("True: " + " ".join(f"{names[i]:3s}" for i in labels[:nmax]))
if pred is not None:
LOGGER.info("Predicted:" + " ".join(f"{names[i]:3s}" for i in pred[:nmax]))
return f
def plot_evolve(evolve_csv="path/to/evolve.csv"):
"""
Plots hyperparameter evolution results from a given CSV, saving the plot and displaying best results.
Example: from utils.plots import *; plot_evolve()
"""
evolve_csv = Path(evolve_csv)
data = pd.read_csv(evolve_csv)
keys = [x.strip() for x in data.columns]
x = data.values
f = fitness(x)
j = np.argmax(f) # max fitness index
plt.figure(figsize=(10, 12), tight_layout=True)
matplotlib.rc("font", **{"size": 8})
print(f"Best results from row {j} of {evolve_csv}:")
for i, k in enumerate(keys[7:]):
v = x[:, 7 + i]
mu = v[j] # best single result
plt.subplot(6, 5, i + 1)
plt.scatter(v, f, c=hist2d(v, f, 20), cmap="viridis", alpha=0.8, edgecolors="none")
plt.plot(mu, f.max(), "k+", markersize=15)
plt.title(f"{k} = {mu:.3g}", fontdict={"size": 9}) # limit to 40 characters
if i % 5 != 0:
plt.yticks([])
print(f"{k:>15}: {mu:.3g}")
f = evolve_csv.with_suffix(".png") # filename
plt.savefig(f, dpi=200)
plt.close()
print(f"Saved {f}")
def plot_results(file="path/to/results.csv", dir=""):
"""
Plots training results from a 'results.csv' file; accepts file path and directory as arguments.
Example: from utils.plots import *; plot_results('path/to/results.csv')
"""
save_dir = Path(file).parent if file else Path(dir)
fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
ax = ax.ravel()
files = list(save_dir.glob("results*.csv"))
assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
for f in files:
try:
data = pd.read_csv(f)
s = [x.strip() for x in data.columns]
x = data.values[:, 0]
for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
y = data.values[:, j].astype("float")
# y[y == 0] = np.nan # don't show zero values
ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=8) # actual results
ax[i].plot(x, gaussian_filter1d(y, sigma=3), ":", label="smooth", linewidth=2) # smoothing line
ax[i].set_title(s[j], fontsize=12)
# if j in [8, 9, 10]: # share train and val loss y axes
# ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
except Exception as e:
LOGGER.info(f"Warning: Plotting error for {f}: {e}")
ax[1].legend()
fig.savefig(save_dir / "results.png", dpi=200)
plt.close()
def profile_idetection(start=0, stop=0, labels=(), save_dir=""):
"""
Plots per-image iDetection logs, comparing metrics like storage and performance over time.
Example: from utils.plots import *; profile_idetection()
"""
ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
s = ["Images", "Free Storage (GB)", "RAM Usage (GB)", "Battery", "dt_raw (ms)", "dt_smooth (ms)", "real-world FPS"]
files = list(Path(save_dir).glob("frames*.txt"))
for fi, f in enumerate(files):
try:
results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
n = results.shape[1] # number of rows
x = np.arange(start, min(stop, n) if stop else n)
results = results[:, x]
t = results[0] - results[0].min() # set t0=0s
results[0] = x
for i, a in enumerate(ax):
if i < len(results):
label = labels[fi] if len(labels) else f.stem.replace("frames_", "")
a.plot(t, results[i], marker=".", label=label, linewidth=1, markersize=5)
a.set_title(s[i])
a.set_xlabel("time (s)")
# if fi == len(files) - 1:
# a.set_ylim(bottom=0)
for side in ["top", "right"]:
a.spines[side].set_visible(False)
else:
a.remove()
except Exception as e:
print(f"Warning: Plotting error for {f}; {e}")
ax[1].legend()
plt.savefig(Path(save_dir) / "idetection_profile.png", dpi=200)
def save_one_box(xyxy, im, file=Path("im.jpg"), gain=1.02, pad=10, square=False, BGR=False, save=True):
"""Crops and saves an image from bounding box `xyxy`, applied with `gain` and `pad`, optionally squares and adjusts
for BGR.
"""
xyxy = torch.tensor(xyxy).view(-1, 4)
b = xyxy2xywh(xyxy) # boxes
if square:
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
xyxy = xywh2xyxy(b).long()
clip_boxes(xyxy, im.shape)
crop = im[int(xyxy[0, 1]) : int(xyxy[0, 3]), int(xyxy[0, 0]) : int(xyxy[0, 2]), :: (1 if BGR else -1)]
if save:
file.parent.mkdir(parents=True, exist_ok=True) # make directory
f = str(increment_path(file).with_suffix(".jpg"))
# cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
return crop
================================================
FILE: utils/segment/__init__.py
================================================
================================================
FILE: utils/segment/augmentations.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Image augmentation functions."""
import math
import random
import cv2
import numpy as np
from ..augmentations import box_candidates
from ..general import resample_segments, segment2box
def mixup(im, labels, segments, im2, labels2, segments2):
"""
Applies MixUp augmentation blending two images, labels, and segments with a random ratio.
See https://arxiv.org/pdf/1710.09412.pdf
"""
r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
im = (im * r + im2 * (1 - r)).astype(np.uint8)
labels = np.concatenate((labels, labels2), 0)
segments = np.concatenate((segments, segments2), 0)
return im, labels, segments
def random_perspective(
im, targets=(), segments=(), degrees=10, translate=0.1, scale=0.1, shear=10, perspective=0.0, border=(0, 0)
):
# torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
# targets = [cls, xyxy]
height = im.shape[0] + border[0] * 2 # shape(h,w,c)
width = im.shape[1] + border[1] * 2
# Center
C = np.eye(3)
C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
# Perspective
P = np.eye(3)
P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
# Rotation and Scale
R = np.eye(3)
a = random.uniform(-degrees, degrees)
# a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
s = random.uniform(1 - scale, 1 + scale)
# s = 2 ** random.uniform(-scale, scale)
R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
# Shear
S = np.eye(3)
S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
# Translation
T = np.eye(3)
T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
# Combined rotation matrix
M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
if perspective:
im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
else: # affine
im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
# Visualize
# import matplotlib.pyplot as plt
# ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
# ax[0].imshow(im[:, :, ::-1]) # base
# ax[1].imshow(im2[:, :, ::-1]) # warped
# Transform label coordinates
n = len(targets)
new_segments = []
if n:
new = np.zeros((n, 4))
segments = resample_segments(segments) # upsample
for i, segment in enumerate(segments):
xy = np.ones((len(segment), 3))
xy[:, :2] = segment
xy = xy @ M.T # transform
xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
# clip
new[i] = segment2box(xy, width, height)
new_segments.append(xy)
# filter candidates
i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
targets = targets[i]
targets[:, 1:5] = new[i]
new_segments = np.array(new_segments)[i]
return im, targets, new_segments
================================================
FILE: utils/segment/dataloaders.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Dataloaders."""
import os
import random
import cv2
import numpy as np
import torch
from torch.utils.data import DataLoader, distributed
from ..augmentations import augment_hsv, copy_paste, letterbox
from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, SmartDistributedSampler, seed_worker
from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
from ..torch_utils import torch_distributed_zero_first
from .augmentations import mixup, random_perspective
RANK = int(os.getenv("RANK", -1))
def create_dataloader(
path,
imgsz,
batch_size,
stride,
single_cls=False,
hyp=None,
augment=False,
cache=False,
pad=0.0,
rect=False,
rank=-1,
workers=8,
image_weights=False,
quad=False,
prefix="",
shuffle=False,
mask_downsample_ratio=1,
overlap_mask=False,
seed=0,
):
if rect and shuffle:
LOGGER.warning("WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False")
shuffle = False
with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
dataset = LoadImagesAndLabelsAndMasks(
path,
imgsz,
batch_size,
augment=augment, # augmentation
hyp=hyp, # hyperparameters
rect=rect, # rectangular batches
cache_images=cache,
single_cls=single_cls,
stride=int(stride),
pad=pad,
image_weights=image_weights,
prefix=prefix,
downsample_ratio=mask_downsample_ratio,
overlap=overlap_mask,
rank=rank,
)
batch_size = min(batch_size, len(dataset))
nd = torch.cuda.device_count() # number of CUDA devices
nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
sampler = None if rank == -1 else SmartDistributedSampler(dataset, shuffle=shuffle)
loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
generator = torch.Generator()
generator.manual_seed(6148914691236517205 + seed + RANK)
return loader(
dataset,
batch_size=batch_size,
shuffle=shuffle and sampler is None,
num_workers=nw,
sampler=sampler,
pin_memory=True,
collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
worker_init_fn=seed_worker,
generator=generator,
), dataset
class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
def __init__(
self,
path,
img_size=640,
batch_size=16,
augment=False,
hyp=None,
rect=False,
image_weights=False,
cache_images=False,
single_cls=False,
stride=32,
pad=0,
min_items=0,
prefix="",
downsample_ratio=1,
overlap=False,
rank=-1,
seed=0,
):
super().__init__(
path,
img_size,
batch_size,
augment,
hyp,
rect,
image_weights,
cache_images,
single_cls,
stride,
pad,
min_items,
prefix,
rank,
seed,
)
self.downsample_ratio = downsample_ratio
self.overlap = overlap
def __getitem__(self, index):
"""Returns a transformed item from the dataset at the specified index, handling indexing and image weighting."""
index = self.indices[index] # linear, shuffled, or image_weights
hyp = self.hyp
mosaic = self.mosaic and random.random() < hyp["mosaic"]
masks = []
if mosaic:
# Load mosaic
img, labels, segments = self.load_mosaic(index)
shapes = None
# MixUp augmentation
if random.random() < hyp["mixup"]:
img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
else:
# Load image
img, (h0, w0), (h, w) = self.load_image(index)
# Letterbox
shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
labels = self.labels[index].copy()
# [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
segments = self.segments[index].copy()
if len(segments):
for i_s in range(len(segments)):
segments[i_s] = xyn2xy(
segments[i_s],
ratio[0] * w,
ratio[1] * h,
padw=pad[0],
padh=pad[1],
)
if labels.size: # normalized xywh to pixel xyxy format
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
if self.augment:
img, labels, segments = random_perspective(
img,
labels,
segments=segments,
degrees=hyp["degrees"],
translate=hyp["translate"],
scale=hyp["scale"],
shear=hyp["shear"],
perspective=hyp["perspective"],
)
nl = len(labels) # number of labels
if nl:
labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
if self.overlap:
masks, sorted_idx = polygons2masks_overlap(
img.shape[:2], segments, downsample_ratio=self.downsample_ratio
)
masks = masks[None] # (640, 640) -> (1, 640, 640)
labels = labels[sorted_idx]
else:
masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
masks = (
torch.from_numpy(masks)
if len(masks)
else torch.zeros(
1 if self.overlap else nl, img.shape[0] // self.downsample_ratio, img.shape[1] // self.downsample_ratio
)
)
# TODO: albumentations support
if self.augment:
# Albumentations
# there are some augmentation that won't change boxes and masks,
# so just be it for now.
img, labels = self.albumentations(img, labels)
nl = len(labels) # update after albumentations
# HSV color-space
augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
# Flip up-down
if random.random() < hyp["flipud"]:
img = np.flipud(img)
if nl:
labels[:, 2] = 1 - labels[:, 2]
masks = torch.flip(masks, dims=[1])
# Flip left-right
if random.random() < hyp["fliplr"]:
img = np.fliplr(img)
if nl:
labels[:, 1] = 1 - labels[:, 1]
masks = torch.flip(masks, dims=[2])
# Cutouts # labels = cutout(img, labels, p=0.5)
labels_out = torch.zeros((nl, 6))
if nl:
labels_out[:, 1:] = torch.from_numpy(labels)
# Convert
img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
img = np.ascontiguousarray(img)
return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
def load_mosaic(self, index):
"""Loads 1 image + 3 random images into a 4-image YOLOv5 mosaic, adjusting labels and segments accordingly."""
labels4, segments4 = [], []
s = self.img_size
yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
# 3 additional image indices
indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
for i, index in enumerate(indices):
# Load image
img, _, (h, w) = self.load_image(index)
# place img in img4
if i == 0: # top left
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
elif i == 1: # top right
x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
elif i == 2: # bottom left
x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
elif i == 3: # bottom right
x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
padw = x1a - x1b
padh = y1a - y1b
labels, segments = self.labels[index].copy(), self.segments[index].copy()
if labels.size:
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
labels4.append(labels)
segments4.extend(segments)
# Concat/clip labels
labels4 = np.concatenate(labels4, 0)
for x in (labels4[:, 1:], *segments4):
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
# img4, labels4 = replicate(img4, labels4) # replicate
# Augment
img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
img4, labels4, segments4 = random_perspective(
img4,
labels4,
segments4,
degrees=self.hyp["degrees"],
translate=self.hyp["translate"],
scale=self.hyp["scale"],
shear=self.hyp["shear"],
perspective=self.hyp["perspective"],
border=self.mosaic_border,
) # border to remove
return img4, labels4, segments4
@staticmethod
def collate_fn(batch):
"""Custom collation function for DataLoader, batches images, labels, paths, shapes, and segmentation masks."""
img, label, path, shapes, masks = zip(*batch) # transposed
batched_masks = torch.cat(masks, 0)
for i, l in enumerate(label):
l[:, 0] = i # add target image index for build_targets()
return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
"""
Args:
img_size (tuple): The image size.
polygons (np.ndarray): [N, M], N is the number of polygons,
M is the number of points(Be divided by 2).
"""
mask = np.zeros(img_size, dtype=np.uint8)
polygons = np.asarray(polygons)
polygons = polygons.astype(np.int32)
shape = polygons.shape
polygons = polygons.reshape(shape[0], -1, 2)
cv2.fillPoly(mask, polygons, color=color)
nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
# NOTE: fillPoly firstly then resize is trying the keep the same way
# of loss calculation when mask-ratio=1.
mask = cv2.resize(mask, (nw, nh))
return mask
def polygons2masks(img_size, polygons, color, downsample_ratio=1):
"""
Args:
img_size (tuple): The image size.
polygons (list[np.ndarray]): each polygon is [N, M],
N is the number of polygons,
M is the number of points(Be divided by 2).
"""
masks = []
for si in range(len(polygons)):
mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
masks.append(mask)
return np.array(masks)
def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
"""Return a (640, 640) overlap mask."""
masks = np.zeros(
(img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
dtype=np.int32 if len(segments) > 255 else np.uint8,
)
areas = []
ms = []
for si in range(len(segments)):
mask = polygon2mask(
img_size,
[segments[si].reshape(-1)],
downsample_ratio=downsample_ratio,
color=1,
)
ms.append(mask)
areas.append(mask.sum())
areas = np.asarray(areas)
index = np.argsort(-areas)
ms = np.array(ms)[index]
for i in range(len(segments)):
mask = ms[i] * (i + 1)
masks = masks + mask
masks = np.clip(masks, a_min=0, a_max=i + 1)
return masks, index
================================================
FILE: utils/segment/general.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import cv2
import numpy as np
import torch
import torch.nn.functional as F
def crop_mask(masks, boxes):
"""
"Crop" predicted masks by zeroing out everything not in the predicted bbox. Vectorized by Chong (thanks Chong).
Args:
- masks should be a size [n, h, w] tensor of masks
- boxes should be a size [n, 4] tensor of bbox coords in relative point form
"""
n, h, w = masks.shape
x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
def process_mask_upsample(protos, masks_in, bboxes, shape):
"""
Crop after upsample.
protos: [mask_dim, mask_h, mask_w]
masks_in: [n, mask_dim], n is number of masks after nms
bboxes: [n, 4], n is number of masks after nms
shape: input_image_size, (h, w)
return: h, w, n
"""
c, mh, mw = protos.shape # CHW
masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
masks = F.interpolate(masks[None], shape, mode="bilinear", align_corners=False)[0] # CHW
masks = crop_mask(masks, bboxes) # CHW
return masks.gt_(0.5)
def process_mask(protos, masks_in, bboxes, shape, upsample=False):
"""
Crop before upsample.
proto_out: [mask_dim, mask_h, mask_w]
out_masks: [n, mask_dim], n is number of masks after nms
bboxes: [n, 4], n is number of masks after nms
shape:input_image_size, (h, w)
return: h, w, n
"""
c, mh, mw = protos.shape # CHW
ih, iw = shape
masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
downsampled_bboxes = bboxes.clone()
downsampled_bboxes[:, 0] *= mw / iw
downsampled_bboxes[:, 2] *= mw / iw
downsampled_bboxes[:, 3] *= mh / ih
downsampled_bboxes[:, 1] *= mh / ih
masks = crop_mask(masks, downsampled_bboxes) # CHW
if upsample:
masks = F.interpolate(masks[None], shape, mode="bilinear", align_corners=False)[0] # CHW
return masks.gt_(0.5)
def process_mask_native(protos, masks_in, bboxes, shape):
"""
Crop after upsample.
protos: [mask_dim, mask_h, mask_w]
masks_in: [n, mask_dim], n is number of masks after nms
bboxes: [n, 4], n is number of masks after nms
shape: input_image_size, (h, w)
return: h, w, n
"""
c, mh, mw = protos.shape # CHW
masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
gain = min(mh / shape[0], mw / shape[1]) # gain = old / new
pad = (mw - shape[1] * gain) / 2, (mh - shape[0] * gain) / 2 # wh padding
top, left = int(pad[1]), int(pad[0]) # y, x
bottom, right = int(mh - pad[1]), int(mw - pad[0])
masks = masks[:, top:bottom, left:right]
masks = F.interpolate(masks[None], shape, mode="bilinear", align_corners=False)[0] # CHW
masks = crop_mask(masks, bboxes) # CHW
return masks.gt_(0.5)
def scale_image(im1_shape, masks, im0_shape, ratio_pad=None):
"""
img1_shape: model input shape, [h, w]
img0_shape: origin pic shape, [h, w, 3]
masks: [h, w, num]
"""
# Rescale coordinates (xyxy) from im1_shape to im0_shape
if ratio_pad is None: # calculate from im0_shape
gain = min(im1_shape[0] / im0_shape[0], im1_shape[1] / im0_shape[1]) # gain = old / new
pad = (im1_shape[1] - im0_shape[1] * gain) / 2, (im1_shape[0] - im0_shape[0] * gain) / 2 # wh padding
else:
pad = ratio_pad[1]
top, left = int(pad[1]), int(pad[0]) # y, x
bottom, right = int(im1_shape[0] - pad[1]), int(im1_shape[1] - pad[0])
if len(masks.shape) < 2:
raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
masks = masks[top:bottom, left:right]
# masks = masks.permute(2, 0, 1).contiguous()
# masks = F.interpolate(masks[None], im0_shape[:2], mode='bilinear', align_corners=False)[0]
# masks = masks.permute(1, 2, 0).contiguous()
masks = cv2.resize(masks, (im0_shape[1], im0_shape[0]))
if len(masks.shape) == 2:
masks = masks[:, :, None]
return masks
def mask_iou(mask1, mask2, eps=1e-7):
"""
mask1: [N, n] m1 means number of predicted objects
mask2: [M, n] m2 means number of gt objects
Note: n means image_w x image_h
return: masks iou, [N, M]
"""
intersection = torch.matmul(mask1, mask2.t()).clamp(0)
union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
return intersection / (union + eps)
def masks_iou(mask1, mask2, eps=1e-7):
"""
mask1: [N, n] m1 means number of predicted objects
mask2: [N, n] m2 means number of gt objects
Note: n means image_w x image_h
return: masks iou, (N, )
"""
intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
return intersection / (union + eps)
def masks2segments(masks, strategy="largest"):
"""Converts binary (n,160,160) masks to polygon segments with options for concatenation or selecting the largest
segment.
"""
segments = []
for x in masks.int().cpu().numpy().astype("uint8"):
c = cv2.findContours(x, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0]
if c:
if strategy == "concat": # concatenate all segments
c = np.concatenate([x.reshape(-1, 2) for x in c])
elif strategy == "largest": # select largest segment
c = np.array(c[np.array([len(x) for x in c]).argmax()]).reshape(-1, 2)
else:
c = np.zeros((0, 2)) # no segments found
segments.append(c.astype("float32"))
return segments
================================================
FILE: utils/segment/loss.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import torch
import torch.nn as nn
import torch.nn.functional as F
from ..general import xywh2xyxy
from ..loss import FocalLoss, smooth_BCE
from ..metrics import bbox_iou
from ..torch_utils import de_parallel
from .general import crop_mask
class ComputeLoss:
# Compute losses
def __init__(self, model, autobalance=False, overlap=False):
"""Initializes the compute loss function for YOLOv5 models with options for autobalancing and overlap
handling.
"""
self.sort_obj_iou = False
self.overlap = overlap
device = next(model.parameters()).device # get model device
h = model.hyp # hyperparameters
# Define criteria
BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["cls_pw"]], device=device))
BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["obj_pw"]], device=device))
# Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
self.cp, self.cn = smooth_BCE(eps=h.get("label_smoothing", 0.0)) # positive, negative BCE targets
# Focal loss
g = h["fl_gamma"] # focal loss gamma
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
m = de_parallel(model).model[-1] # Detect() module
self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
self.na = m.na # number of anchors
self.nc = m.nc # number of classes
self.nl = m.nl # number of layers
self.nm = m.nm # number of masks
self.anchors = m.anchors
self.device = device
def __call__(self, preds, targets, masks): # predictions, targets, model
"""Evaluates YOLOv5 model's loss for given predictions, targets, and masks; returns total loss components."""
p, proto = preds
bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
lcls = torch.zeros(1, device=self.device)
lbox = torch.zeros(1, device=self.device)
lobj = torch.zeros(1, device=self.device)
lseg = torch.zeros(1, device=self.device)
tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
# Losses
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
n = b.shape[0] # number of targets
if n:
pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
# Box regression
pxy = pxy.sigmoid() * 2 - 0.5
pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
# Objectness
iou = iou.detach().clamp(0).type(tobj.dtype)
if self.sort_obj_iou:
j = iou.argsort()
b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
if self.gr < 1:
iou = (1.0 - self.gr) + self.gr * iou
tobj[b, a, gj, gi] = iou # iou ratio
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
t = torch.full_like(pcls, self.cn, device=self.device) # targets
t[range(n), tcls[i]] = self.cp
lcls += self.BCEcls(pcls, t) # BCE
# Mask regression
if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
masks = F.interpolate(masks[None], (mask_h, mask_w), mode="nearest")[0]
marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
for bi in b.unique():
j = b == bi # matching index
if self.overlap:
mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
else:
mask_gti = masks[tidxs[i]][j]
lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
obji = self.BCEobj(pi[..., 4], tobj)
lobj += obji * self.balance[i] # obj loss
if self.autobalance:
self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
if self.autobalance:
self.balance = [x / self.balance[self.ssi] for x in self.balance]
lbox *= self.hyp["box"]
lobj *= self.hyp["obj"]
lcls *= self.hyp["cls"]
lseg *= self.hyp["box"] / bs
loss = lbox + lobj + lcls + lseg
return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
"""Calculates and normalizes single mask loss for YOLOv5 between predicted and ground truth masks."""
pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
return (crop_mask(loss, xyxy).mean(dim=(1, 2)) / area).mean()
def build_targets(self, p, targets):
"""Prepares YOLOv5 targets for loss computation; inputs targets (image, class, x, y, w, h), output target
classes/boxes.
"""
na, nt = self.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
gain = torch.ones(8, device=self.device) # normalized to gridspace gain
ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
if self.overlap:
batch = p[0].shape[0]
ti = []
for i in range(batch):
num = (targets[:, 0] == i).sum() # find number of targets of each image
ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
ti = torch.cat(ti, 1) # (na, nt)
else:
ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
g = 0.5 # bias
off = (
torch.tensor(
[
[0, 0],
[1, 0],
[0, 1],
[-1, 0],
[0, -1], # j,k,l,m
# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
],
device=self.device,
).float()
* g
) # offsets
for i in range(self.nl):
anchors, shape = self.anchors[i], p[i].shape
gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
# Match targets to anchors
t = targets * gain # shape(3,n,7)
if nt:
# Matches
r = t[..., 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1 / r).max(2)[0] < self.hyp["anchor_t"] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filter
# Offsets
gxy = t[:, 2:4] # grid xy
gxi = gain[[2, 3]] - gxy # inverse
j, k = ((gxy % 1 < g) & (gxy > 1)).T
l, m = ((gxi % 1 < g) & (gxi > 1)).T
j = torch.stack((torch.ones_like(j), j, k, l, m))
t = t.repeat((5, 1, 1))[j]
offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
else:
t = targets[0]
offsets = 0
# Define
bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
(a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
gij = (gxy - offsets).long()
gi, gj = gij.T # grid indices
# Append
indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
anch.append(anchors[a]) # anchors
tcls.append(c) # class
tidxs.append(tidx)
xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
return tcls, tbox, indices, anch, tidxs, xywhn
================================================
FILE: utils/segment/metrics.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Model validation metrics."""
import numpy as np
from ..metrics import ap_per_class
def fitness(x):
"""Evaluates model fitness by a weighted sum of 8 metrics, `x`: [N,8] array, weights: [0.1, 0.9] for mAP and F1."""
w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
return (x[:, :8] * w).sum(1)
def ap_per_class_box_and_mask(
tp_m,
tp_b,
conf,
pred_cls,
target_cls,
plot=False,
save_dir=".",
names=(),
):
"""
Args:
tp_b: tp of boxes.
tp_m: tp of masks.
other arguments see `func: ap_per_class`.
"""
results_boxes = ap_per_class(
tp_b, conf, pred_cls, target_cls, plot=plot, save_dir=save_dir, names=names, prefix="Box"
)[2:]
results_masks = ap_per_class(
tp_m, conf, pred_cls, target_cls, plot=plot, save_dir=save_dir, names=names, prefix="Mask"
)[2:]
return {
"boxes": {
"p": results_boxes[0],
"r": results_boxes[1],
"ap": results_boxes[3],
"f1": results_boxes[2],
"ap_class": results_boxes[4],
},
"masks": {
"p": results_masks[0],
"r": results_masks[1],
"ap": results_masks[3],
"f1": results_masks[2],
"ap_class": results_masks[4],
},
}
class Metric:
def __init__(self) -> None:
self.p = [] # (nc, )
self.r = [] # (nc, )
self.f1 = [] # (nc, )
self.all_ap = [] # (nc, 10)
self.ap_class_index = [] # (nc, )
@property
def ap50(self):
"""
AP@0.5 of all classes.
Return:
(nc, ) or [].
"""
return self.all_ap[:, 0] if len(self.all_ap) else []
@property
def ap(self):
"""AP@0.5:0.95
Return:
(nc, ) or [].
"""
return self.all_ap.mean(1) if len(self.all_ap) else []
@property
def mp(self):
"""
Mean precision of all classes.
Return:
float.
"""
return self.p.mean() if len(self.p) else 0.0
@property
def mr(self):
"""
Mean recall of all classes.
Return:
float.
"""
return self.r.mean() if len(self.r) else 0.0
@property
def map50(self):
"""
Mean AP@0.5 of all classes.
Return:
float.
"""
return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
@property
def map(self):
"""
Mean AP@0.5:0.95 of all classes.
Return:
float.
"""
return self.all_ap.mean() if len(self.all_ap) else 0.0
def mean_results(self):
"""Mean of results, return mp, mr, map50, map."""
return (self.mp, self.mr, self.map50, self.map)
def class_result(self, i):
"""Class-aware result, return p[i], r[i], ap50[i], ap[i]"""
return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
def get_maps(self, nc):
"""Calculates and returns mean Average Precision (mAP) for each class given number of classes `nc`."""
maps = np.zeros(nc) + self.map
for i, c in enumerate(self.ap_class_index):
maps[c] = self.ap[i]
return maps
def update(self, results):
"""
Args:
results: tuple(p, r, ap, f1, ap_class)
"""
p, r, all_ap, f1, ap_class_index = results
self.p = p
self.r = r
self.all_ap = all_ap
self.f1 = f1
self.ap_class_index = ap_class_index
class Metrics:
"""Metric for boxes and masks."""
def __init__(self) -> None:
self.metric_box = Metric()
self.metric_mask = Metric()
def update(self, results):
"""
Args:
results: Dict{'boxes': Dict{}, 'masks': Dict{}}
"""
self.metric_box.update(list(results["boxes"].values()))
self.metric_mask.update(list(results["masks"].values()))
def mean_results(self):
"""Computes and returns the mean results for both box and mask metrics by summing their individual means."""
return self.metric_box.mean_results() + self.metric_mask.mean_results()
def class_result(self, i):
"""Returns the sum of box and mask metric results for a specified class index `i`."""
return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
def get_maps(self, nc):
"""Calculates and returns the sum of mean average precisions (mAPs) for both box and mask metrics for `nc`
classes.
"""
return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
@property
def ap_class_index(self):
"""Returns the class index for average precision, shared by both box and mask metrics."""
return self.metric_box.ap_class_index
KEYS = [
"train/box_loss",
"train/seg_loss", # train loss
"train/obj_loss",
"train/cls_loss",
"metrics/precision(B)",
"metrics/recall(B)",
"metrics/mAP_0.5(B)",
"metrics/mAP_0.5:0.95(B)", # metrics
"metrics/precision(M)",
"metrics/recall(M)",
"metrics/mAP_0.5(M)",
"metrics/mAP_0.5:0.95(M)", # metrics
"val/box_loss",
"val/seg_loss", # val loss
"val/obj_loss",
"val/cls_loss",
"x/lr0",
"x/lr1",
"x/lr2",
]
BEST_KEYS = [
"best/epoch",
"best/precision(B)",
"best/recall(B)",
"best/mAP_0.5(B)",
"best/mAP_0.5:0.95(B)",
"best/precision(M)",
"best/recall(M)",
"best/mAP_0.5(M)",
"best/mAP_0.5:0.95(M)",
]
================================================
FILE: utils/segment/plots.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import contextlib
import math
from pathlib import Path
import cv2
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import torch
from .. import threaded
from ..general import xywh2xyxy
from ..plots import Annotator, colors
@threaded
def plot_images_and_masks(images, targets, masks, paths=None, fname="images.jpg", names=None):
"""Plots a grid of images, their labels, and masks with optional resizing and annotations, saving to fname."""
if isinstance(images, torch.Tensor):
images = images.cpu().float().numpy()
if isinstance(targets, torch.Tensor):
targets = targets.cpu().numpy()
if isinstance(masks, torch.Tensor):
masks = masks.cpu().numpy().astype(int)
max_size = 1920 # max image size
max_subplots = 16 # max image subplots, i.e. 4x4
bs, _, h, w = images.shape # batch size, _, height, width
bs = min(bs, max_subplots) # limit plot images
ns = np.ceil(bs**0.5) # number of subplots (square)
if np.max(images[0]) <= 1:
images *= 255 # de-normalise (optional)
# Build Image
mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
for i, im in enumerate(images):
if i == max_subplots: # if last batch has fewer images than we expect
break
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
im = im.transpose(1, 2, 0)
mosaic[y : y + h, x : x + w, :] = im
# Resize (optional)
scale = max_size / ns / max(h, w)
if scale < 1:
h = math.ceil(scale * h)
w = math.ceil(scale * w)
mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
# Annotate
fs = int((h + w) * ns * 0.01) # font size
annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
for i in range(i + 1):
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
if paths:
annotator.text([x + 5, y + 5], text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
if len(targets) > 0:
idx = targets[:, 0] == i
ti = targets[idx] # image targets
boxes = xywh2xyxy(ti[:, 2:6]).T
classes = ti[:, 1].astype("int")
labels = ti.shape[1] == 6 # labels if no conf column
conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
if boxes.shape[1]:
if boxes.max() <= 1.01: # if normalized with tolerance 0.01
boxes[[0, 2]] *= w # scale to pixels
boxes[[1, 3]] *= h
elif scale < 1: # absolute coords need scale if image scales
boxes *= scale
boxes[[0, 2]] += x
boxes[[1, 3]] += y
for j, box in enumerate(boxes.T.tolist()):
cls = classes[j]
color = colors(cls)
cls = names[cls] if names else cls
if labels or conf[j] > 0.25: # 0.25 conf thresh
label = f"{cls}" if labels else f"{cls} {conf[j]:.1f}"
annotator.box_label(box, label, color=color)
# Plot masks
if len(masks):
if masks.max() > 1.0: # mean that masks are overlap
image_masks = masks[[i]] # (1, 640, 640)
nl = len(ti)
index = np.arange(nl).reshape(nl, 1, 1) + 1
image_masks = np.repeat(image_masks, nl, axis=0)
image_masks = np.where(image_masks == index, 1.0, 0.0)
else:
image_masks = masks[idx]
im = np.asarray(annotator.im).copy()
for j, box in enumerate(boxes.T.tolist()):
if labels or conf[j] > 0.25: # 0.25 conf thresh
color = colors(classes[j])
mh, mw = image_masks[j].shape
if mh != h or mw != w:
mask = image_masks[j].astype(np.uint8)
mask = cv2.resize(mask, (w, h))
mask = mask.astype(bool)
else:
mask = image_masks[j].astype(bool)
with contextlib.suppress(Exception):
im[y : y + h, x : x + w, :][mask] = (
im[y : y + h, x : x + w, :][mask] * 0.4 + np.array(color) * 0.6
)
annotator.fromarray(im)
annotator.im.save(fname) # save
def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
"""
Plots training results from CSV files, plotting best or last result highlights based on `best` parameter.
Example: from utils.plots import *; plot_results('path/to/results.csv')
"""
save_dir = Path(file).parent if file else Path(dir)
fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
ax = ax.ravel()
files = list(save_dir.glob("results*.csv"))
assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
for f in files:
try:
data = pd.read_csv(f)
index = np.argmax(
0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] + 0.1 * data.values[:, 11]
)
s = [x.strip() for x in data.columns]
x = data.values[:, 0]
for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
y = data.values[:, j]
# y[y == 0] = np.nan # don't show zero values
ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
if best:
# best
ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
else:
# last
ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
# if j in [8, 9, 10]: # share train and val loss y axes
# ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
except Exception as e:
print(f"Warning: Plotting error for {f}: {e}")
ax[1].legend()
fig.savefig(save_dir / "results.png", dpi=200)
plt.close()
================================================
FILE: utils/torch_utils.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""PyTorch utils."""
import math
import os
import platform
import subprocess
import time
import warnings
from contextlib import contextmanager
from copy import deepcopy
from pathlib import Path
import torch
import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
from torch.nn.parallel import DistributedDataParallel as DDP
from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
LOCAL_RANK = int(os.getenv("LOCAL_RANK", -1)) # https://pytorch.org/docs/stable/elastic/run.html
RANK = int(os.getenv("RANK", -1))
WORLD_SIZE = int(os.getenv("WORLD_SIZE", 1))
try:
import thop # for FLOPs computation
except ImportError:
thop = None
# Suppress PyTorch warnings
warnings.filterwarnings("ignore", message="User provided device_type of 'cuda', but CUDA is not available. Disabling")
warnings.filterwarnings("ignore", category=UserWarning)
def smart_inference_mode(torch_1_9=check_version(torch.__version__, "1.9.0")):
"""Applies torch.inference_mode() if torch>=1.9.0, else torch.no_grad() as a decorator for functions."""
def decorate(fn):
return (torch.inference_mode if torch_1_9 else torch.no_grad)()(fn)
return decorate
def smartCrossEntropyLoss(label_smoothing=0.0):
"""Returns a CrossEntropyLoss with optional label smoothing for torch>=1.10.0; warns if smoothing on lower
versions.
"""
if check_version(torch.__version__, "1.10.0"):
return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
if label_smoothing > 0:
LOGGER.warning(f"WARNING ⚠️ label smoothing {label_smoothing} requires torch>=1.10.0")
return nn.CrossEntropyLoss()
def smart_DDP(model):
"""Initializes DistributedDataParallel (DDP) for model training, respecting torch version constraints."""
assert not check_version(torch.__version__, "1.12.0", pinned=True), (
"torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. "
"Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395"
)
if check_version(torch.__version__, "1.11.0"):
return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
else:
return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
def reshape_classifier_output(model, n=1000):
"""Reshapes last layer of model to match class count 'n', supporting Classify, Linear, Sequential types."""
from models.common import Classify
name, m = list((model.model if hasattr(model, "model") else model).named_children())[-1] # last module
if isinstance(m, Classify): # YOLOv5 Classify() head
if m.linear.out_features != n:
m.linear = nn.Linear(m.linear.in_features, n)
elif isinstance(m, nn.Linear): # ResNet, EfficientNet
if m.out_features != n:
setattr(model, name, nn.Linear(m.in_features, n))
elif isinstance(m, nn.Sequential):
types = [type(x) for x in m]
if nn.Linear in types:
i = len(types) - 1 - types[::-1].index(nn.Linear) # last nn.Linear index
if m[i].out_features != n:
m[i] = nn.Linear(m[i].in_features, n)
elif nn.Conv2d in types:
i = len(types) - 1 - types[::-1].index(nn.Conv2d) # last nn.Conv2d index
if m[i].out_channels != n:
m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias is not None)
@contextmanager
def torch_distributed_zero_first(local_rank: int):
"""Context manager ensuring ordered operations in distributed training by making all processes wait for the leading
process.
"""
if local_rank not in [-1, 0]:
dist.barrier(device_ids=[local_rank])
yield
if local_rank == 0:
dist.barrier(device_ids=[0])
def device_count():
"""Returns the number of available CUDA devices; works on Linux and Windows by invoking `nvidia-smi`."""
assert platform.system() in ("Linux", "Windows"), "device_count() only supported on Linux or Windows"
try:
cmd = "nvidia-smi -L | wc -l" if platform.system() == "Linux" else 'nvidia-smi -L | find /c /v ""' # Windows
return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
except Exception:
return 0
def select_device(device="", batch_size=0, newline=True):
"""Selects computing device (CPU, CUDA GPU, MPS) for YOLOv5 model deployment, logging device info."""
s = f"YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} "
device = str(device).strip().lower().replace("cuda:", "").replace("none", "") # to string, 'cuda:0' to '0'
dml = device == "dml"
cpu = device == "cpu"
mps = device == "mps" # Apple Metal Performance Shaders (MPS)
if cpu or mps or dml:
os.environ["CUDA_VISIBLE_DEVICES"] = "-1" # force torch.cuda.is_available() = False
elif device: # non-cpu device requested
os.environ["CUDA_VISIBLE_DEVICES"] = device # set environment variable - must be before assert is_available()
assert torch.cuda.is_available() and torch.cuda.device_count() >= len(
device.replace(",", "")
), f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
if not dml and not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
devices = device.split(",") if device else "0" # range(torch.cuda.device_count()) # i.e. 0,1,6,7
n = len(devices) # device count
if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
assert batch_size % n == 0, f"batch-size {batch_size} not multiple of GPU count {n}"
space = " " * (len(s) + 1)
for i, d in enumerate(devices):
p = torch.cuda.get_device_properties(i)
s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
arg = "cuda:0"
elif mps and getattr(torch, "has_mps", False) and torch.backends.mps.is_available(): # prefer MPS if available
s += "MPS\n"
arg = "mps"
elif dml:
import torch_directml
if torch_directml.is_available():
devices = torch_directml.device(0) # 启用0号dml设备,在这可以更换使用的设备
n = 0
s += r"dml:" + str(torch_directml.device_name(0))
arg = torch_directml.device(0)
else:
s += "CPU\n"
arg = "cpu"
else: # revert to CPU
s += "CPU\n"
arg = "cpu"
if not newline:
s = s.rstrip()
LOGGER.info(s)
return torch.device(arg)
def time_sync():
"""Synchronizes PyTorch for accurate timing, leveraging CUDA if available, and returns the current time."""
if torch.cuda.is_available():
torch.cuda.synchronize()
return time.time()
def profile(input, ops, n=10, device=None):
"""YOLOv5 speed/memory/FLOPs profiler
Usage:
input = torch.randn(16, 3, 640, 640)
m1 = lambda x: x * torch.sigmoid(x)
m2 = nn.SiLU()
profile(input, [m1, m2], n=100) # profile over 100 iterations
"""
results = []
if not isinstance(device, torch.device):
device = select_device(device)
print(
f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
f"{'input':>24s}{'output':>24s}"
)
for x in input if isinstance(input, list) else [input]:
x = x.to(device)
x.requires_grad = True
for m in ops if isinstance(ops, list) else [ops]:
m = m.to(device) if hasattr(m, "to") else m # device
m = m.half() if hasattr(m, "half") and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
try:
flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1e9 * 2 # GFLOPs
except Exception:
flops = 0
try:
for _ in range(n):
t[0] = time_sync()
y = m(x)
t[1] = time_sync()
try:
_ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
t[2] = time_sync()
except Exception: # no backward method
# print(e) # for debug
t[2] = float("nan")
tf += (t[1] - t[0]) * 1000 / n # ms per op forward
tb += (t[2] - t[1]) * 1000 / n # ms per op backward
mem = torch.cuda.memory_reserved() / 1e9 if torch.cuda.is_available() else 0 # (GB)
s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else "list" for x in (x, y)) # shapes
p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
print(f"{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}")
results.append([p, flops, mem, tf, tb, s_in, s_out])
except Exception as e:
print(e)
results.append(None)
torch.cuda.empty_cache()
return results
def is_parallel(model):
"""Checks if the model is using Data Parallelism (DP) or Distributed Data Parallelism (DDP)."""
return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
def de_parallel(model):
"""Returns a single-GPU model by removing Data Parallelism (DP) or Distributed Data Parallelism (DDP) if applied."""
return model.module if is_parallel(model) else model
def initialize_weights(model):
"""Initializes weights of Conv2d, BatchNorm2d, and activations (Hardswish, LeakyReLU, ReLU, ReLU6, SiLU) in the
model.
"""
for m in model.modules():
t = type(m)
if t is nn.Conv2d:
pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif t is nn.BatchNorm2d:
m.eps = 1e-3
m.momentum = 0.03
elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
m.inplace = True
def find_modules(model, mclass=nn.Conv2d):
"""Finds and returns list of layer indices in `model.module_list` matching the specified `mclass`."""
return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
def sparsity(model):
"""Calculates and returns the global sparsity of a model as the ratio of zero-valued parameters to total
parameters.
"""
a, b = 0, 0
for p in model.parameters():
a += p.numel()
b += (p == 0).sum()
return b / a
def prune(model, amount=0.3):
"""Prunes Conv2d layers in a model to a specified sparsity using L1 unstructured pruning."""
import torch.nn.utils.prune as prune
for name, m in model.named_modules():
if isinstance(m, nn.Conv2d):
prune.l1_unstructured(m, name="weight", amount=amount) # prune
prune.remove(m, "weight") # make permanent
LOGGER.info(f"Model pruned to {sparsity(model):.3g} global sparsity")
def fuse_conv_and_bn(conv, bn):
"""
Fuses Conv2d and BatchNorm2d layers into a single Conv2d layer.
See https://tehnokv.com/posts/fusing-batchnorm-and-conv/.
"""
fusedconv = (
nn.Conv2d(
conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
dilation=conv.dilation,
groups=conv.groups,
bias=True,
)
.requires_grad_(False)
.to(conv.weight.device)
)
# Prepare filters
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
# Prepare spatial bias
b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
return fusedconv
def model_info(model, verbose=False, imgsz=640):
"""
Prints model summary including layers, parameters, gradients, and FLOPs; imgsz may be int or list.
Example: img_size=640 or img_size=[640, 320]
"""
n_p = sum(x.numel() for x in model.parameters()) # number parameters
n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
if verbose:
print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
for i, (name, p) in enumerate(model.named_parameters()):
name = name.replace("module_list.", "")
print(
"%5g %40s %9s %12g %20s %10.3g %10.3g"
% (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std())
)
try: # FLOPs
p = next(model.parameters())
stride = max(int(model.stride.max()), 32) if hasattr(model, "stride") else 32 # max stride
im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1e9 * 2 # stride GFLOPs
imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
fs = f", {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs" # 640x640 GFLOPs
except Exception:
fs = ""
name = Path(model.yaml_file).stem.replace("yolov5", "YOLOv5") if hasattr(model, "yaml_file") else "Model"
LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
"""Scales an image tensor `img` of shape (bs,3,y,x) by `ratio`, optionally maintaining the original shape, padded to
multiples of `gs`.
"""
if ratio == 1.0:
return img
h, w = img.shape[2:]
s = (int(h * ratio), int(w * ratio)) # new size
img = F.interpolate(img, size=s, mode="bilinear", align_corners=False) # resize
if not same_shape: # pad/crop img
h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
def copy_attr(a, b, include=(), exclude=()):
"""Copies attributes from object b to a, optionally filtering with include and exclude lists."""
for k, v in b.__dict__.items():
if (len(include) and k not in include) or k.startswith("_") or k in exclude:
continue
else:
setattr(a, k, v)
def smart_optimizer(model, name="Adam", lr=0.001, momentum=0.9, decay=1e-5):
"""
Initializes YOLOv5 smart optimizer with 3 parameter groups for different decay configurations.
Groups are 0) weights with decay, 1) weights no decay, 2) biases no decay.
"""
g = [], [], [] # optimizer parameter groups
bn = tuple(v for k, v in nn.__dict__.items() if "Norm" in k) # normalization layers, i.e. BatchNorm2d()
for v in model.modules():
for p_name, p in v.named_parameters(recurse=0):
if p_name == "bias": # bias (no decay)
g[2].append(p)
elif p_name == "weight" and isinstance(v, bn): # weight (no decay)
g[1].append(p)
else:
g[0].append(p) # weight (with decay)
if name == "Adam":
optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
elif name == "AdamW":
optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
elif name == "RMSProp":
optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
elif name == "SGD":
optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
else:
raise NotImplementedError(f"Optimizer {name} not implemented.")
optimizer.add_param_group({"params": g[0], "weight_decay": decay}) # add g0 with weight_decay
optimizer.add_param_group({"params": g[1], "weight_decay": 0.0}) # add g1 (BatchNorm2d weights)
LOGGER.info(
f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
f'{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias'
)
return optimizer
def smart_hub_load(repo="ultralytics/yolov5", model="yolov5s", **kwargs):
"""YOLOv5 torch.hub.load() wrapper with smart error handling, adjusting torch arguments for compatibility."""
if check_version(torch.__version__, "1.9.1"):
kwargs["skip_validation"] = True # validation causes GitHub API rate limit errors
if check_version(torch.__version__, "1.12.0"):
kwargs["trust_repo"] = True # argument required starting in torch 0.12
try:
return torch.hub.load(repo, model, **kwargs)
except Exception:
return torch.hub.load(repo, model, force_reload=True, **kwargs)
def smart_resume(ckpt, optimizer, ema=None, weights="yolov5s.pt", epochs=300, resume=True):
"""Resumes training from a checkpoint, updating optimizer, ema, and epochs, with optional resume verification."""
best_fitness = 0.0
start_epoch = ckpt["epoch"] + 1
if ckpt["optimizer"] is not None:
optimizer.load_state_dict(ckpt["optimizer"]) # optimizer
best_fitness = ckpt["best_fitness"]
if ema and ckpt.get("ema"):
ema.ema.load_state_dict(ckpt["ema"].float().state_dict()) # EMA
ema.updates = ckpt["updates"]
if resume:
assert start_epoch > 0, (
f"{weights} training to {epochs} epochs is finished, nothing to resume.\n"
f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
)
LOGGER.info(f"Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs")
if epochs < start_epoch:
LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
epochs += ckpt["epoch"] # finetune additional epochs
return best_fitness, start_epoch, epochs
class EarlyStopping:
# YOLOv5 simple early stopper
def __init__(self, patience=30):
"""Initializes simple early stopping mechanism for YOLOv5, with adjustable patience for non-improving epochs."""
self.best_fitness = 0.0 # i.e. mAP
self.best_epoch = 0
self.patience = patience or float("inf") # epochs to wait after fitness stops improving to stop
self.possible_stop = False # possible stop may occur next epoch
def __call__(self, epoch, fitness):
"""Evaluates if training should stop based on fitness improvement and patience, returning a boolean."""
if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
self.best_epoch = epoch
self.best_fitness = fitness
delta = epoch - self.best_epoch # epochs without improvement
self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
stop = delta >= self.patience # stop training if patience exceeded
if stop:
LOGGER.info(
f"Stopping training early as no improvement observed in last {self.patience} epochs. "
f"Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n"
f"To update EarlyStopping(patience={self.patience}) pass a new patience value, "
f"i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping."
)
return stop
class ModelEMA:
"""Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
Keeps a moving average of everything in the model state_dict (parameters and buffers)
For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
"""
def __init__(self, model, decay=0.9999, tau=2000, updates=0):
"""Initializes EMA with model parameters, decay rate, tau for decay adjustment, and update count; sets model to
evaluation mode.
"""
self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
self.updates = updates # number of EMA updates
self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
for p in self.ema.parameters():
p.requires_grad_(False)
def update(self, model):
"""Updates the Exponential Moving Average (EMA) parameters based on the current model's parameters."""
self.updates += 1
d = self.decay(self.updates)
msd = de_parallel(model).state_dict() # model state_dict
for k, v in self.ema.state_dict().items():
if v.dtype.is_floating_point: # true for FP16 and FP32
v *= d
v += (1 - d) * msd[k].detach()
# assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
def update_attr(self, model, include=(), exclude=("process_group", "reducer")):
"""Updates EMA attributes by copying specified attributes from model to EMA, excluding certain attributes by
default.
"""
copy_attr(self.ema, model, include, exclude)
================================================
FILE: utils/triton.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Utils to interact with the Triton Inference Server."""
import typing
from urllib.parse import urlparse
import torch
class TritonRemoteModel:
"""
A wrapper over a model served by the Triton Inference Server.
It can be configured to communicate over GRPC or HTTP. It accepts Torch Tensors as input and returns them as
outputs.
"""
def __init__(self, url: str):
"""
Keyword arguments:
url: Fully qualified address of the Triton server - for e.g. grpc://localhost:8000
"""
parsed_url = urlparse(url)
if parsed_url.scheme == "grpc":
from tritonclient.grpc import InferenceServerClient, InferInput
self.client = InferenceServerClient(parsed_url.netloc) # Triton GRPC client
model_repository = self.client.get_model_repository_index()
self.model_name = model_repository.models[0].name
self.metadata = self.client.get_model_metadata(self.model_name, as_json=True)
def create_input_placeholders() -> typing.List[InferInput]:
return [
InferInput(i["name"], [int(s) for s in i["shape"]], i["datatype"]) for i in self.metadata["inputs"]
]
else:
from tritonclient.http import InferenceServerClient, InferInput
self.client = InferenceServerClient(parsed_url.netloc) # Triton HTTP client
model_repository = self.client.get_model_repository_index()
self.model_name = model_repository[0]["name"]
self.metadata = self.client.get_model_metadata(self.model_name)
def create_input_placeholders() -> typing.List[InferInput]:
return [
InferInput(i["name"], [int(s) for s in i["shape"]], i["datatype"]) for i in self.metadata["inputs"]
]
self._create_input_placeholders_fn = create_input_placeholders
@property
def runtime(self):
"""Returns the model runtime."""
return self.metadata.get("backend", self.metadata.get("platform"))
def __call__(self, *args, **kwargs) -> typing.Union[torch.Tensor, typing.Tuple[torch.Tensor, ...]]:
"""
Invokes the model.
Parameters can be provided via args or kwargs. args, if provided, are assumed to match the order of inputs of
the model. kwargs are matched with the model input names.
"""
inputs = self._create_inputs(*args, **kwargs)
response = self.client.infer(model_name=self.model_name, inputs=inputs)
result = []
for output in self.metadata["outputs"]:
tensor = torch.as_tensor(response.as_numpy(output["name"]))
result.append(tensor)
return result[0] if len(result) == 1 else result
def _create_inputs(self, *args, **kwargs):
"""Creates input tensors from args or kwargs, not both; raises error if none or both are provided."""
args_len, kwargs_len = len(args), len(kwargs)
if not args_len and not kwargs_len:
raise RuntimeError("No inputs provided.")
if args_len and kwargs_len:
raise RuntimeError("Cannot specify args and kwargs at the same time")
placeholders = self._create_input_placeholders_fn()
if args_len:
if args_len != len(placeholders):
raise RuntimeError(f"Expected {len(placeholders)} inputs, got {args_len}.")
for input, value in zip(placeholders, args):
input.set_data_from_numpy(value.cpu().numpy())
else:
for input in placeholders:
value = kwargs[input.name]
input.set_data_from_numpy(value.cpu().numpy())
return placeholders
================================================
FILE: val.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""
Validate a trained YOLOv5 detection model on a detection dataset.
Usage:
$ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
Usage - formats:
$ python val.py --weights yolov5s.pt # PyTorch
yolov5s.torchscript # TorchScript
yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
yolov5s_openvino_model # OpenVINO
yolov5s.engine # TensorRT
yolov5s.mlmodel # CoreML (macOS-only)
yolov5s_saved_model # TensorFlow SavedModel
yolov5s.pb # TensorFlow GraphDef
yolov5s.tflite # TensorFlow Lite
yolov5s_edgetpu.tflite # TensorFlow Edge TPU
yolov5s_paddle_model # PaddlePaddle
"""
import argparse
import json
import os
import subprocess
import sys
from pathlib import Path
import numpy as np
import torch
from tqdm import tqdm
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
from models.common import DetectMultiBackend
from utils.callbacks import Callbacks
from utils.dataloaders import create_dataloader
from utils.general import (
LOGGER,
TQDM_BAR_FORMAT,
Profile,
check_dataset,
check_img_size,
check_requirements,
check_yaml,
coco80_to_coco91_class,
colorstr,
increment_path,
non_max_suppression,
print_args,
scale_boxes,
xywh2xyxy,
xyxy2xywh,
)
from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
from utils.plots import output_to_target, plot_images, plot_val_study
from utils.torch_utils import select_device, smart_inference_mode
def save_one_txt(predn, save_conf, shape, file):
"""Saves one detection result to a txt file in normalized xywh format, optionally including confidence."""
gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
for *xyxy, conf, cls in predn.tolist():
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
with open(file, "a") as f:
f.write(("%g " * len(line)).rstrip() % line + "\n")
def save_one_json(predn, jdict, path, class_map):
"""
Saves one JSON detection result with image ID, category ID, bounding box, and score.
Example: {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
"""
image_id = int(path.stem) if path.stem.isnumeric() else path.stem
box = xyxy2xywh(predn[:, :4]) # xywh
box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
for p, b in zip(predn.tolist(), box.tolist()):
jdict.append(
{
"image_id": image_id,
"category_id": class_map[int(p[5])],
"bbox": [round(x, 3) for x in b],
"score": round(p[4], 5),
}
)
def process_batch(detections, labels, iouv):
"""
Return correct prediction matrix.
Arguments:
detections (array[N, 6]), x1, y1, x2, y2, conf, class
labels (array[M, 5]), class, x1, y1, x2, y2
Returns:
correct (array[N, 10]), for 10 IoU levels
"""
correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
iou = box_iou(labels[:, 1:], detections[:, :4])
correct_class = labels[:, 0:1] == detections[:, 5]
for i in range(len(iouv)):
x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
if x[0].shape[0]:
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
if x[0].shape[0] > 1:
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
# matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
correct[matches[:, 1].astype(int), i] = True
return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
@smart_inference_mode()
def run(
data,
weights=None, # model.pt path(s)
batch_size=32, # batch size
imgsz=640, # inference size (pixels)
conf_thres=0.001, # confidence threshold
iou_thres=0.6, # NMS IoU threshold
max_det=300, # maximum detections per image
task="val", # train, val, test, speed or study
device="", # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
single_cls=False, # treat as single-class dataset
augment=False, # augmented inference
verbose=False, # verbose output
save_txt=False, # save results to *.txt
save_hybrid=False, # save label+prediction hybrid results to *.txt
save_conf=False, # save confidences in --save-txt labels
save_json=False, # save a COCO-JSON results file
project=ROOT / "runs/val", # save to project/name
name="exp", # save to project/name
exist_ok=False, # existing project/name ok, do not increment
half=True, # use FP16 half-precision inference
dnn=False, # use OpenCV DNN for ONNX inference
model=None,
dataloader=None,
save_dir=Path(""),
plots=True,
callbacks=Callbacks(),
compute_loss=None,
):
# Initialize/load model and set device
training = model is not None
if training: # called by train.py
device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
half &= device.type != "cpu" # half precision only supported on CUDA
model.half() if half else model.float()
else: # called directly
device = select_device(device, batch_size=batch_size)
# Directories
save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
(save_dir / "labels" if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Load model
model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
imgsz = check_img_size(imgsz, s=stride) # check image size
half = model.fp16 # FP16 supported on limited backends with CUDA
if engine:
batch_size = model.batch_size
else:
device = model.device
if not (pt or jit):
batch_size = 1 # export.py models default to batch-size 1
LOGGER.info(f"Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models")
# Data
data = check_dataset(data) # check
# Configure
model.eval()
cuda = device.type != "cpu"
is_coco = isinstance(data.get("val"), str) and data["val"].endswith(f"coco{os.sep}val2017.txt") # COCO dataset
nc = 1 if single_cls else int(data["nc"]) # number of classes
iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
niou = iouv.numel()
# Dataloader
if not training:
if pt and not single_cls: # check --weights are trained on --data
ncm = model.model.nc
assert ncm == nc, (
f"{weights} ({ncm} classes) trained on different --data than what you passed ({nc} "
f"classes). Pass correct combination of --weights and --data that are trained together."
)
model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
pad, rect = (0.0, False) if task == "speed" else (0.5, pt) # square inference for benchmarks
task = task if task in ("train", "val", "test") else "val" # path to train/val/test images
dataloader = create_dataloader(
data[task],
imgsz,
batch_size,
stride,
single_cls,
pad=pad,
rect=rect,
workers=workers,
prefix=colorstr(f"{task}: "),
)[0]
seen = 0
confusion_matrix = ConfusionMatrix(nc=nc)
names = model.names if hasattr(model, "names") else model.module.names # get class names
if isinstance(names, (list, tuple)): # old format
names = dict(enumerate(names))
class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
s = ("%22s" + "%11s" * 6) % ("Class", "Images", "Instances", "P", "R", "mAP50", "mAP50-95")
tp, fp, p, r, f1, mp, mr, map50, ap50, map = 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
dt = Profile(device=device), Profile(device=device), Profile(device=device) # profiling times
loss = torch.zeros(3, device=device)
jdict, stats, ap, ap_class = [], [], [], []
callbacks.run("on_val_start")
pbar = tqdm(dataloader, desc=s, bar_format=TQDM_BAR_FORMAT) # progress bar
for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
callbacks.run("on_val_batch_start")
with dt[0]:
if cuda:
im = im.to(device, non_blocking=True)
targets = targets.to(device)
im = im.half() if half else im.float() # uint8 to fp16/32
im /= 255 # 0 - 255 to 0.0 - 1.0
nb, _, height, width = im.shape # batch size, channels, height, width
# Inference
with dt[1]:
preds, train_out = model(im) if compute_loss else (model(im, augment=augment), None)
# Loss
if compute_loss:
loss += compute_loss(train_out, targets)[1] # box, obj, cls
# NMS
targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
with dt[2]:
preds = non_max_suppression(
preds, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls, max_det=max_det
)
# Metrics
for si, pred in enumerate(preds):
labels = targets[targets[:, 0] == si, 1:]
nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
path, shape = Path(paths[si]), shapes[si][0]
correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
seen += 1
if npr == 0:
if nl:
stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
if plots:
confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
continue
# Predictions
if single_cls:
pred[:, 5] = 0
predn = pred.clone()
scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
# Evaluate
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
correct = process_batch(predn, labelsn, iouv)
if plots:
confusion_matrix.process_batch(predn, labelsn)
stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
# Save/log
if save_txt:
(save_dir / "labels").mkdir(parents=True, exist_ok=True)
save_one_txt(predn, save_conf, shape, file=save_dir / "labels" / f"{path.stem}.txt")
if save_json:
save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
callbacks.run("on_val_image_end", pred, predn, path, names, im[si])
# Plot images
if plots and batch_i < 3:
plot_images(im, targets, paths, save_dir / f"val_batch{batch_i}_labels.jpg", names) # labels
plot_images(im, output_to_target(preds), paths, save_dir / f"val_batch{batch_i}_pred.jpg", names) # pred
callbacks.run("on_val_batch_end", batch_i, im, targets, paths, shapes, preds)
# Compute metrics
stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
if len(stats) and stats[0].any():
tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
# Print results
pf = "%22s" + "%11i" * 2 + "%11.3g" * 4 # print format
LOGGER.info(pf % ("all", seen, nt.sum(), mp, mr, map50, map))
if nt.sum() == 0:
LOGGER.warning(f"WARNING ⚠️ no labels found in {task} set, can not compute metrics without labels")
# Print results per class
if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
for i, c in enumerate(ap_class):
LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
# Print speeds
t = tuple(x.t / seen * 1e3 for x in dt) # speeds per image
if not training:
shape = (batch_size, 3, imgsz, imgsz)
LOGGER.info(f"Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}" % t)
# Plots
if plots:
confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
callbacks.run("on_val_end", nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix)
# Save JSON
if save_json and len(jdict):
w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else "" # weights
anno_json = str(Path("../datasets/coco/annotations/instances_val2017.json")) # annotations
if not os.path.exists(anno_json):
anno_json = os.path.join(data["path"], "annotations", "instances_val2017.json")
pred_json = str(save_dir / f"{w}_predictions.json") # predictions
LOGGER.info(f"\nEvaluating pycocotools mAP... saving {pred_json}...")
with open(pred_json, "w") as f:
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
check_requirements("pycocotools>=2.0.6")
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
anno = COCO(anno_json) # init annotations api
pred = anno.loadRes(pred_json) # init predictions api
eval = COCOeval(anno, pred, "bbox")
if is_coco:
eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
eval.evaluate()
eval.accumulate()
eval.summarize()
map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
except Exception as e:
LOGGER.info(f"pycocotools unable to run: {e}")
# Return results
model.float() # for training
if not training:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ""
LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
maps = np.zeros(nc) + map
for i, c in enumerate(ap_class):
maps[c] = ap[i]
return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
def parse_opt():
"""Parses command-line options for YOLOv5 model inference configuration."""
parser = argparse.ArgumentParser()
parser.add_argument("--data", type=str, default=ROOT / "data/coco128.yaml", help="dataset.yaml path")
parser.add_argument("--weights", nargs="+", type=str, default=ROOT / "yolov5s.pt", help="model path(s)")
parser.add_argument("--batch-size", type=int, default=32, help="batch size")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=640, help="inference size (pixels)")
parser.add_argument("--conf-thres", type=float, default=0.001, help="confidence threshold")
parser.add_argument("--iou-thres", type=float, default=0.6, help="NMS IoU threshold")
parser.add_argument("--max-det", type=int, default=300, help="maximum detections per image")
parser.add_argument("--task", default="val", help="train, val, test, speed or study")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--workers", type=int, default=8, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--single-cls", action="store_true", help="treat as single-class dataset")
parser.add_argument("--augment", action="store_true", help="augmented inference")
parser.add_argument("--verbose", action="store_true", help="report mAP by class")
parser.add_argument("--save-txt", action="store_true", help="save results to *.txt")
parser.add_argument("--save-hybrid", action="store_true", help="save label+prediction hybrid results to *.txt")
parser.add_argument("--save-conf", action="store_true", help="save confidences in --save-txt labels")
parser.add_argument("--save-json", action="store_true", help="save a COCO-JSON results file")
parser.add_argument("--project", default=ROOT / "runs/val", help="save to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--half", action="store_true", help="use FP16 half-precision inference")
parser.add_argument("--dnn", action="store_true", help="use OpenCV DNN for ONNX inference")
opt = parser.parse_args()
opt.data = check_yaml(opt.data) # check YAML
opt.save_json |= opt.data.endswith("coco.yaml")
opt.save_txt |= opt.save_hybrid
print_args(vars(opt))
return opt
def main(opt):
"""Executes YOLOv5 tasks like training, validation, testing, speed, and study benchmarks based on provided
options.
"""
check_requirements(ROOT / "requirements.txt", exclude=("tensorboard", "thop"))
if opt.task in ("train", "val", "test"): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
LOGGER.info(f"WARNING ⚠️ confidence threshold {opt.conf_thres} > 0.001 produces invalid results")
if opt.save_hybrid:
LOGGER.info("WARNING ⚠️ --save-hybrid will return high mAP from hybrid labels, not from predictions alone")
run(**vars(opt))
else:
weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
opt.half = torch.cuda.is_available() and opt.device != "cpu" # FP16 for fastest results
if opt.task == "speed": # speed benchmarks
# python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
for opt.weights in weights:
run(**vars(opt), plots=False)
elif opt.task == "study": # speed vs mAP benchmarks
# python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
for opt.weights in weights:
f = f"study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt" # filename to save to
x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
for opt.imgsz in x: # img-size
LOGGER.info(f"\nRunning {f} --imgsz {opt.imgsz}...")
r, _, t = run(**vars(opt), plots=False)
y.append(r + t) # results and times
np.savetxt(f, y, fmt="%10.4g") # save
subprocess.run(["zip", "-r", "study.zip", "study_*.txt"])
plot_val_study(x=x) # plot
else:
raise NotImplementedError(f'--task {opt.task} not in ("train", "val", "test", "speed", "study")')
if __name__ == "__main__":
opt = parse_opt()
main(opt)
================================================
FILE: validate.spec
================================================
# -*- mode: python ; coding: utf-8 -*-
block_cipher = None
a = Analysis(
['web\\validate.py'],
pathex=[],
binaries=[],
datas=[],
hiddenimports=[],
hookspath=[],
hooksconfig={},
runtime_hooks=[],
excludes=[],
win_no_prefer_redirects=False,
win_private_assemblies=False,
cipher=block_cipher,
noarchive=False,
)
pyz = PYZ(a.pure, a.zipped_data, cipher=block_cipher)
exe = EXE(
pyz,
a.scripts,
[],
exclude_binaries=True,
name='validate',
debug=False,
bootloader_ignore_signals=False,
strip=False,
upx=True,
console=True,
disable_windowed_traceback=False,
argv_emulation=False,
target_arch=None,
codesign_identity=None,
entitlements_file=None,
)
coll = COLLECT(
exe,
a.binaries,
a.zipfiles,
a.datas,
strip=False,
upx=True,
upx_exclude=[],
name='validate',
)
================================================
FILE: 训练命令.txt
================================================
python train.py --weights .\apex_model\apex2.pt --data .\apex_model\1w2\1w.yaml --workers 8 --batch-size 16 --epochs 1000
python export.py --imgsz (320,320) --weights .\apex_model\1w2\best_20230918.pt --data .\apex_model\1w2\1w.yaml --include engine --device 0 --half
python detect.py --imgsz 640 --data .\apex_model\3k.yaml --weights .\apex_model\3k.pt --source .\data\images\six.mp4 --conf-thres 0.6 --iou-thres 0.1
================================================
FILE: utils/loggers/comet/__init__.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import glob
import json
import logging
import os
import sys
from pathlib import Path
logger = logging.getLogger(__name__)
FILE = Path(__file__).resolve()
ROOT = FILE.parents[3] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
try:
import comet_ml
# Project Configuration
config = comet_ml.config.get_config()
COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
except ImportError:
comet_ml = None
COMET_PROJECT_NAME = None
import PIL
import torch
import torchvision.transforms as T
import yaml
from utils.dataloaders import img2label_paths
from utils.general import check_dataset, scale_boxes, xywh2xyxy
from utils.metrics import box_iou
COMET_PREFIX = "comet://"
COMET_MODE = os.getenv("COMET_MODE", "online")
# Model Saving Settings
COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
# Dataset Artifact Settings
COMET_UPLOAD_DATASET = os.getenv("COMET_UPLOAD_DATASET", "false").lower() == "true"
# Evaluation Settings
COMET_LOG_CONFUSION_MATRIX = os.getenv("COMET_LOG_CONFUSION_MATRIX", "true").lower() == "true"
COMET_LOG_PREDICTIONS = os.getenv("COMET_LOG_PREDICTIONS", "true").lower() == "true"
COMET_MAX_IMAGE_UPLOADS = int(os.getenv("COMET_MAX_IMAGE_UPLOADS", 100))
# Confusion Matrix Settings
CONF_THRES = float(os.getenv("CONF_THRES", 0.001))
IOU_THRES = float(os.getenv("IOU_THRES", 0.6))
# Batch Logging Settings
COMET_LOG_BATCH_METRICS = os.getenv("COMET_LOG_BATCH_METRICS", "false").lower() == "true"
COMET_BATCH_LOGGING_INTERVAL = os.getenv("COMET_BATCH_LOGGING_INTERVAL", 1)
COMET_PREDICTION_LOGGING_INTERVAL = os.getenv("COMET_PREDICTION_LOGGING_INTERVAL", 1)
COMET_LOG_PER_CLASS_METRICS = os.getenv("COMET_LOG_PER_CLASS_METRICS", "false").lower() == "true"
RANK = int(os.getenv("RANK", -1))
to_pil = T.ToPILImage()
class CometLogger:
"""Log metrics, parameters, source code, models and much more with Comet."""
def __init__(self, opt, hyp, run_id=None, job_type="Training", **experiment_kwargs) -> None:
self.job_type = job_type
self.opt = opt
self.hyp = hyp
# Comet Flags
self.comet_mode = COMET_MODE
self.save_model = opt.save_period > -1
self.model_name = COMET_MODEL_NAME
# Batch Logging Settings
self.log_batch_metrics = COMET_LOG_BATCH_METRICS
self.comet_log_batch_interval = COMET_BATCH_LOGGING_INTERVAL
# Dataset Artifact Settings
self.upload_dataset = self.opt.upload_dataset or COMET_UPLOAD_DATASET
self.resume = self.opt.resume
# Default parameters to pass to Experiment objects
self.default_experiment_kwargs = {
"log_code": False,
"log_env_gpu": True,
"log_env_cpu": True,
"project_name": COMET_PROJECT_NAME,
}
self.default_experiment_kwargs.update(experiment_kwargs)
self.experiment = self._get_experiment(self.comet_mode, run_id)
self.experiment.set_name(self.opt.name)
self.data_dict = self.check_dataset(self.opt.data)
self.class_names = self.data_dict["names"]
self.num_classes = self.data_dict["nc"]
self.logged_images_count = 0
self.max_images = COMET_MAX_IMAGE_UPLOADS
if run_id is None:
self.experiment.log_other("Created from", "YOLOv5")
if not isinstance(self.experiment, comet_ml.OfflineExperiment):
workspace, project_name, experiment_id = self.experiment.url.split("/")[-3:]
self.experiment.log_other(
"Run Path",
f"{workspace}/{project_name}/{experiment_id}",
)
self.log_parameters(vars(opt))
self.log_parameters(self.opt.hyp)
self.log_asset_data(
self.opt.hyp,
name="hyperparameters.json",
metadata={"type": "hyp-config-file"},
)
self.log_asset(
f"{self.opt.save_dir}/opt.yaml",
metadata={"type": "opt-config-file"},
)
self.comet_log_confusion_matrix = COMET_LOG_CONFUSION_MATRIX
if hasattr(self.opt, "conf_thres"):
self.conf_thres = self.opt.conf_thres
else:
self.conf_thres = CONF_THRES
if hasattr(self.opt, "iou_thres"):
self.iou_thres = self.opt.iou_thres
else:
self.iou_thres = IOU_THRES
self.log_parameters({"val_iou_threshold": self.iou_thres, "val_conf_threshold": self.conf_thres})
self.comet_log_predictions = COMET_LOG_PREDICTIONS
if self.opt.bbox_interval == -1:
self.comet_log_prediction_interval = 1 if self.opt.epochs < 10 else self.opt.epochs // 10
else:
self.comet_log_prediction_interval = self.opt.bbox_interval
if self.comet_log_predictions:
self.metadata_dict = {}
self.logged_image_names = []
self.comet_log_per_class_metrics = COMET_LOG_PER_CLASS_METRICS
self.experiment.log_others(
{
"comet_mode": COMET_MODE,
"comet_max_image_uploads": COMET_MAX_IMAGE_UPLOADS,
"comet_log_per_class_metrics": COMET_LOG_PER_CLASS_METRICS,
"comet_log_batch_metrics": COMET_LOG_BATCH_METRICS,
"comet_log_confusion_matrix": COMET_LOG_CONFUSION_MATRIX,
"comet_model_name": COMET_MODEL_NAME,
}
)
# Check if running the Experiment with the Comet Optimizer
if hasattr(self.opt, "comet_optimizer_id"):
self.experiment.log_other("optimizer_id", self.opt.comet_optimizer_id)
self.experiment.log_other("optimizer_objective", self.opt.comet_optimizer_objective)
self.experiment.log_other("optimizer_metric", self.opt.comet_optimizer_metric)
self.experiment.log_other("optimizer_parameters", json.dumps(self.hyp))
def _get_experiment(self, mode, experiment_id=None):
"""Returns a new or existing Comet.ml experiment based on mode and optional experiment_id."""
if mode == "offline":
return (
comet_ml.ExistingOfflineExperiment(
previous_experiment=experiment_id,
**self.default_experiment_kwargs,
)
if experiment_id is not None
else comet_ml.OfflineExperiment(
**self.default_experiment_kwargs,
)
)
try:
if experiment_id is not None:
return comet_ml.ExistingExperiment(
previous_experiment=experiment_id,
**self.default_experiment_kwargs,
)
return comet_ml.Experiment(**self.default_experiment_kwargs)
except ValueError:
logger.warning(
"COMET WARNING: "
"Comet credentials have not been set. "
"Comet will default to offline logging. "
"Please set your credentials to enable online logging."
)
return self._get_experiment("offline", experiment_id)
return
def log_metrics(self, log_dict, **kwargs):
"""Logs metrics to the current experiment, accepting a dictionary of metric names and values."""
self.experiment.log_metrics(log_dict, **kwargs)
def log_parameters(self, log_dict, **kwargs):
"""Logs parameters to the current experiment, accepting a dictionary of parameter names and values."""
self.experiment.log_parameters(log_dict, **kwargs)
def log_asset(self, asset_path, **kwargs):
"""Logs a file or directory as an asset to the current experiment."""
self.experiment.log_asset(asset_path, **kwargs)
def log_asset_data(self, asset, **kwargs):
"""Logs in-memory data as an asset to the current experiment, with optional kwargs."""
self.experiment.log_asset_data(asset, **kwargs)
def log_image(self, img, **kwargs):
"""Logs an image to the current experiment with optional kwargs."""
self.experiment.log_image(img, **kwargs)
def log_model(self, path, opt, epoch, fitness_score, best_model=False):
"""Logs model checkpoint to experiment with path, options, epoch, fitness, and best model flag."""
if not self.save_model:
return
model_metadata = {
"fitness_score": fitness_score[-1],
"epochs_trained": epoch + 1,
"save_period": opt.save_period,
"total_epochs": opt.epochs,
}
model_files = glob.glob(f"{path}/*.pt")
for model_path in model_files:
name = Path(model_path).name
self.experiment.log_model(
self.model_name,
file_or_folder=model_path,
file_name=name,
metadata=model_metadata,
overwrite=True,
)
def check_dataset(self, data_file):
"""Validates the dataset configuration by loading the YAML file specified in `data_file`."""
with open(data_file) as f:
data_config = yaml.safe_load(f)
path = data_config.get("path")
if path and path.startswith(COMET_PREFIX):
path = data_config["path"].replace(COMET_PREFIX, "")
return self.download_dataset_artifact(path)
self.log_asset(self.opt.data, metadata={"type": "data-config-file"})
return check_dataset(data_file)
def log_predictions(self, image, labelsn, path, shape, predn):
"""Logs predictions with IOU filtering, given image, labels, path, shape, and predictions."""
if self.logged_images_count >= self.max_images:
return
detections = predn[predn[:, 4] > self.conf_thres]
iou = box_iou(labelsn[:, 1:], detections[:, :4])
mask, _ = torch.where(iou > self.iou_thres)
if len(mask) == 0:
return
filtered_detections = detections[mask]
filtered_labels = labelsn[mask]
image_id = path.split("/")[-1].split(".")[0]
image_name = f"{image_id}_curr_epoch_{self.experiment.curr_epoch}"
if image_name not in self.logged_image_names:
native_scale_image = PIL.Image.open(path)
self.log_image(native_scale_image, name=image_name)
self.logged_image_names.append(image_name)
metadata = [
{
"label": f"{self.class_names[int(cls)]}-gt",
"score": 100,
"box": {"x": xyxy[0], "y": xyxy[1], "x2": xyxy[2], "y2": xyxy[3]},
}
for cls, *xyxy in filtered_labels.tolist()
]
metadata.extend(
{
"label": f"{self.class_names[int(cls)]}",
"score": conf * 100,
"box": {"x": xyxy[0], "y": xyxy[1], "x2": xyxy[2], "y2": xyxy[3]},
}
for *xyxy, conf, cls in filtered_detections.tolist()
)
self.metadata_dict[image_name] = metadata
self.logged_images_count += 1
return
def preprocess_prediction(self, image, labels, shape, pred):
"""Processes prediction data, resizing labels and adding dataset metadata."""
nl, _ = labels.shape[0], pred.shape[0]
# Predictions
if self.opt.single_cls:
pred[:, 5] = 0
predn = pred.clone()
scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1])
labelsn = None
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
scale_boxes(image.shape[1:], tbox, shape[0], shape[1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
scale_boxes(image.shape[1:], predn[:, :4], shape[0], shape[1]) # native-space pred
return predn, labelsn
def add_assets_to_artifact(self, artifact, path, asset_path, split):
"""Adds image and label assets to a wandb artifact given dataset split and paths."""
img_paths = sorted(glob.glob(f"{asset_path}/*"))
label_paths = img2label_paths(img_paths)
for image_file, label_file in zip(img_paths, label_paths):
image_logical_path, label_logical_path = map(lambda x: os.path.relpath(x, path), [image_file, label_file])
try:
artifact.add(
image_file,
logical_path=image_logical_path,
metadata={"split": split},
)
artifact.add(
label_file,
logical_path=label_logical_path,
metadata={"split": split},
)
except ValueError as e:
logger.error("COMET ERROR: Error adding file to Artifact. Skipping file.")
logger.error(f"COMET ERROR: {e}")
continue
return artifact
def upload_dataset_artifact(self):
"""Uploads a YOLOv5 dataset as an artifact to the Comet.ml platform."""
dataset_name = self.data_dict.get("dataset_name", "yolov5-dataset")
path = str((ROOT / Path(self.data_dict["path"])).resolve())
metadata = self.data_dict.copy()
for key in ["train", "val", "test"]:
split_path = metadata.get(key)
if split_path is not None:
metadata[key] = split_path.replace(path, "")
artifact = comet_ml.Artifact(name=dataset_name, artifact_type="dataset", metadata=metadata)
for key in metadata.keys():
if key in ["train", "val", "test"]:
if isinstance(self.upload_dataset, str) and (key != self.upload_dataset):
continue
asset_path = self.data_dict.get(key)
if asset_path is not None:
artifact = self.add_assets_to_artifact(artifact, path, asset_path, key)
self.experiment.log_artifact(artifact)
return
def download_dataset_artifact(self, artifact_path):
"""Downloads a dataset artifact to a specified directory using the experiment's logged artifact."""
logged_artifact = self.experiment.get_artifact(artifact_path)
artifact_save_dir = str(Path(self.opt.save_dir) / logged_artifact.name)
logged_artifact.download(artifact_save_dir)
metadata = logged_artifact.metadata
data_dict = metadata.copy()
data_dict["path"] = artifact_save_dir
metadata_names = metadata.get("names")
if isinstance(metadata_names, dict):
data_dict["names"] = {int(k): v for k, v in metadata.get("names").items()}
elif isinstance(metadata_names, list):
data_dict["names"] = {int(k): v for k, v in zip(range(len(metadata_names)), metadata_names)}
else:
raise "Invalid 'names' field in dataset yaml file. Please use a list or dictionary"
return self.update_data_paths(data_dict)
def update_data_paths(self, data_dict):
"""Updates data paths in the dataset dictionary, defaulting 'path' to an empty string if not present."""
path = data_dict.get("path", "")
for split in ["train", "val", "test"]:
if data_dict.get(split):
split_path = data_dict.get(split)
data_dict[split] = (
f"{path}/{split_path}" if isinstance(split, str) else [f"{path}/{x}" for x in split_path]
)
return data_dict
def on_pretrain_routine_end(self, paths):
"""Called at the end of pretraining routine to handle paths if training is not being resumed."""
if self.opt.resume:
return
for path in paths:
self.log_asset(str(path))
if self.upload_dataset and not self.resume:
self.upload_dataset_artifact()
return
def on_train_start(self):
"""Logs hyperparameters at the start of training."""
self.log_parameters(self.hyp)
def on_train_epoch_start(self):
"""Called at the start of each training epoch."""
return
def on_train_epoch_end(self, epoch):
"""Updates the current epoch in the experiment tracking at the end of each epoch."""
self.experiment.curr_epoch = epoch
return
def on_train_batch_start(self):
"""Called at the start of each training batch."""
return
def on_train_batch_end(self, log_dict, step):
"""Callback function that updates and logs metrics at the end of each training batch if conditions are met."""
self.experiment.curr_step = step
if self.log_batch_metrics and (step % self.comet_log_batch_interval == 0):
self.log_metrics(log_dict, step=step)
return
def on_train_end(self, files, save_dir, last, best, epoch, results):
"""Logs metadata and optionally saves model files at the end of training."""
if self.comet_log_predictions:
curr_epoch = self.experiment.curr_epoch
self.experiment.log_asset_data(self.metadata_dict, "image-metadata.json", epoch=curr_epoch)
for f in files:
self.log_asset(f, metadata={"epoch": epoch})
self.log_asset(f"{save_dir}/results.csv", metadata={"epoch": epoch})
if not self.opt.evolve:
model_path = str(best if best.exists() else last)
name = Path(model_path).name
if self.save_model:
self.experiment.log_model(
self.model_name,
file_or_folder=model_path,
file_name=name,
overwrite=True,
)
# Check if running Experiment with Comet Optimizer
if hasattr(self.opt, "comet_optimizer_id"):
metric = results.get(self.opt.comet_optimizer_metric)
self.experiment.log_other("optimizer_metric_value", metric)
self.finish_run()
def on_val_start(self):
"""Called at the start of validation, currently a placeholder with no functionality."""
return
def on_val_batch_start(self):
"""Placeholder called at the start of a validation batch with no current functionality."""
return
def on_val_batch_end(self, batch_i, images, targets, paths, shapes, outputs):
"""Callback executed at the end of a validation batch, conditionally logs predictions to Comet ML."""
if not (self.comet_log_predictions and ((batch_i + 1) % self.comet_log_prediction_interval == 0)):
return
for si, pred in enumerate(outputs):
if len(pred) == 0:
continue
image = images[si]
labels = targets[targets[:, 0] == si, 1:]
shape = shapes[si]
path = paths[si]
predn, labelsn = self.preprocess_prediction(image, labels, shape, pred)
if labelsn is not None:
self.log_predictions(image, labelsn, path, shape, predn)
return
def on_val_end(self, nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix):
"""Logs per-class metrics to Comet.ml after validation if enabled and more than one class exists."""
if self.comet_log_per_class_metrics and self.num_classes > 1:
for i, c in enumerate(ap_class):
class_name = self.class_names[c]
self.experiment.log_metrics(
{
"mAP@.5": ap50[i],
"mAP@.5:.95": ap[i],
"precision": p[i],
"recall": r[i],
"f1": f1[i],
"true_positives": tp[i],
"false_positives": fp[i],
"support": nt[c],
},
prefix=class_name,
)
if self.comet_log_confusion_matrix:
epoch = self.experiment.curr_epoch
class_names = list(self.class_names.values())
class_names.append("background")
num_classes = len(class_names)
self.experiment.log_confusion_matrix(
matrix=confusion_matrix.matrix,
max_categories=num_classes,
labels=class_names,
epoch=epoch,
column_label="Actual Category",
row_label="Predicted Category",
file_name=f"confusion-matrix-epoch-{epoch}.json",
)
def on_fit_epoch_end(self, result, epoch):
"""Logs metrics at the end of each training epoch."""
self.log_metrics(result, epoch=epoch)
def on_model_save(self, last, epoch, final_epoch, best_fitness, fi):
"""Callback to save model checkpoints periodically if conditions are met."""
if ((epoch + 1) % self.opt.save_period == 0 and not final_epoch) and self.opt.save_period != -1:
self.log_model(last.parent, self.opt, epoch, fi, best_model=best_fitness == fi)
def on_params_update(self, params):
"""Logs updated parameters during training."""
self.log_parameters(params)
def finish_run(self):
"""Ends the current experiment and logs its completion."""
self.experiment.end()
================================================
FILE: utils/loggers/comet/comet_utils.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import logging
import os
from urllib.parse import urlparse
try:
import comet_ml
except ImportError:
comet_ml = None
import yaml
logger = logging.getLogger(__name__)
COMET_PREFIX = "comet://"
COMET_MODEL_NAME = os.getenv("COMET_MODEL_NAME", "yolov5")
COMET_DEFAULT_CHECKPOINT_FILENAME = os.getenv("COMET_DEFAULT_CHECKPOINT_FILENAME", "last.pt")
def download_model_checkpoint(opt, experiment):
"""Downloads YOLOv5 model checkpoint from Comet ML experiment, updating `opt.weights` with download path."""
model_dir = f"{opt.project}/{experiment.name}"
os.makedirs(model_dir, exist_ok=True)
model_name = COMET_MODEL_NAME
model_asset_list = experiment.get_model_asset_list(model_name)
if len(model_asset_list) == 0:
logger.error(f"COMET ERROR: No checkpoints found for model name : {model_name}")
return
model_asset_list = sorted(
model_asset_list,
key=lambda x: x["step"],
reverse=True,
)
logged_checkpoint_map = {asset["fileName"]: asset["assetId"] for asset in model_asset_list}
resource_url = urlparse(opt.weights)
checkpoint_filename = resource_url.query
if checkpoint_filename:
asset_id = logged_checkpoint_map.get(checkpoint_filename)
else:
asset_id = logged_checkpoint_map.get(COMET_DEFAULT_CHECKPOINT_FILENAME)
checkpoint_filename = COMET_DEFAULT_CHECKPOINT_FILENAME
if asset_id is None:
logger.error(f"COMET ERROR: Checkpoint {checkpoint_filename} not found in the given Experiment")
return
try:
logger.info(f"COMET INFO: Downloading checkpoint {checkpoint_filename}")
asset_filename = checkpoint_filename
model_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
model_download_path = f"{model_dir}/{asset_filename}"
with open(model_download_path, "wb") as f:
f.write(model_binary)
opt.weights = model_download_path
except Exception as e:
logger.warning("COMET WARNING: Unable to download checkpoint from Comet")
logger.exception(e)
def set_opt_parameters(opt, experiment):
"""
Update the opts Namespace with parameters from Comet's ExistingExperiment when resuming a run.
Args:
opt (argparse.Namespace): Namespace of command line options
experiment (comet_ml.APIExperiment): Comet API Experiment object
"""
asset_list = experiment.get_asset_list()
resume_string = opt.resume
for asset in asset_list:
if asset["fileName"] == "opt.yaml":
asset_id = asset["assetId"]
asset_binary = experiment.get_asset(asset_id, return_type="binary", stream=False)
opt_dict = yaml.safe_load(asset_binary)
for key, value in opt_dict.items():
setattr(opt, key, value)
opt.resume = resume_string
# Save hyperparameters to YAML file
# Necessary to pass checks in training script
save_dir = f"{opt.project}/{experiment.name}"
os.makedirs(save_dir, exist_ok=True)
hyp_yaml_path = f"{save_dir}/hyp.yaml"
with open(hyp_yaml_path, "w") as f:
yaml.dump(opt.hyp, f)
opt.hyp = hyp_yaml_path
def check_comet_weights(opt):
"""
Downloads model weights from Comet and updates the weights path to point to saved weights location.
Args:
opt (argparse.Namespace): Command Line arguments passed
to YOLOv5 training script
Returns:
None/bool: Return True if weights are successfully downloaded
else return None
"""
if comet_ml is None:
return
if isinstance(opt.weights, str) and opt.weights.startswith(COMET_PREFIX):
api = comet_ml.API()
resource = urlparse(opt.weights)
experiment_path = f"{resource.netloc}{resource.path}"
experiment = api.get(experiment_path)
download_model_checkpoint(opt, experiment)
return True
return None
def check_comet_resume(opt):
"""
Restores run parameters to its original state based on the model checkpoint and logged Experiment parameters.
Args:
opt (argparse.Namespace): Command Line arguments passed
to YOLOv5 training script
Returns:
None/bool: Return True if the run is restored successfully
else return None
"""
if comet_ml is None:
return
if isinstance(opt.resume, str) and opt.resume.startswith(COMET_PREFIX):
api = comet_ml.API()
resource = urlparse(opt.resume)
experiment_path = f"{resource.netloc}{resource.path}"
experiment = api.get(experiment_path)
set_opt_parameters(opt, experiment)
download_model_checkpoint(opt, experiment)
return True
return None
================================================
FILE: utils/loggers/comet/hpo.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import argparse
import json
import logging
import os
import sys
from pathlib import Path
import comet_ml
logger = logging.getLogger(__name__)
FILE = Path(__file__).resolve()
ROOT = FILE.parents[3] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
from train import train
from utils.callbacks import Callbacks
from utils.general import increment_path
from utils.torch_utils import select_device
# Project Configuration
config = comet_ml.config.get_config()
COMET_PROJECT_NAME = config.get_string(os.getenv("COMET_PROJECT_NAME"), "comet.project_name", default="yolov5")
def get_args(known=False):
"""Parses command-line arguments for YOLOv5 training, supporting configuration of weights, data paths,
hyperparameters, and more.
"""
parser = argparse.ArgumentParser()
parser.add_argument("--weights", type=str, default=ROOT / "yolov5s.pt", help="initial weights path")
parser.add_argument("--cfg", type=str, default="", help="model.yaml path")
parser.add_argument("--data", type=str, default=ROOT / "data/coco128.yaml", help="dataset.yaml path")
parser.add_argument("--hyp", type=str, default=ROOT / "data/hyps/hyp.scratch-low.yaml", help="hyperparameters path")
parser.add_argument("--epochs", type=int, default=300, help="total training epochs")
parser.add_argument("--batch-size", type=int, default=16, help="total batch size for all GPUs, -1 for autobatch")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=640, help="train, val image size (pixels)")
parser.add_argument("--rect", action="store_true", help="rectangular training")
parser.add_argument("--resume", nargs="?", const=True, default=False, help="resume most recent training")
parser.add_argument("--nosave", action="store_true", help="only save final checkpoint")
parser.add_argument("--noval", action="store_true", help="only validate final epoch")
parser.add_argument("--noautoanchor", action="store_true", help="disable AutoAnchor")
parser.add_argument("--noplots", action="store_true", help="save no plot files")
parser.add_argument("--evolve", type=int, nargs="?", const=300, help="evolve hyperparameters for x generations")
parser.add_argument("--bucket", type=str, default="", help="gsutil bucket")
parser.add_argument("--cache", type=str, nargs="?", const="ram", help='--cache images in "ram" (default) or "disk"')
parser.add_argument("--image-weights", action="store_true", help="use weighted image selection for training")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--multi-scale", action="store_true", help="vary img-size +/- 50%%")
parser.add_argument("--single-cls", action="store_true", help="train multi-class data as single-class")
parser.add_argument("--optimizer", type=str, choices=["SGD", "Adam", "AdamW"], default="SGD", help="optimizer")
parser.add_argument("--sync-bn", action="store_true", help="use SyncBatchNorm, only available in DDP mode")
parser.add_argument("--workers", type=int, default=8, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--project", default=ROOT / "runs/train", help="save to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--quad", action="store_true", help="quad dataloader")
parser.add_argument("--cos-lr", action="store_true", help="cosine LR scheduler")
parser.add_argument("--label-smoothing", type=float, default=0.0, help="Label smoothing epsilon")
parser.add_argument("--patience", type=int, default=100, help="EarlyStopping patience (epochs without improvement)")
parser.add_argument("--freeze", nargs="+", type=int, default=[0], help="Freeze layers: backbone=10, first3=0 1 2")
parser.add_argument("--save-period", type=int, default=-1, help="Save checkpoint every x epochs (disabled if < 1)")
parser.add_argument("--seed", type=int, default=0, help="Global training seed")
parser.add_argument("--local_rank", type=int, default=-1, help="Automatic DDP Multi-GPU argument, do not modify")
# Weights & Biases arguments
parser.add_argument("--entity", default=None, help="W&B: Entity")
parser.add_argument("--upload_dataset", nargs="?", const=True, default=False, help='W&B: Upload data, "val" option')
parser.add_argument("--bbox_interval", type=int, default=-1, help="W&B: Set bounding-box image logging interval")
parser.add_argument("--artifact_alias", type=str, default="latest", help="W&B: Version of dataset artifact to use")
# Comet Arguments
parser.add_argument("--comet_optimizer_config", type=str, help="Comet: Path to a Comet Optimizer Config File.")
parser.add_argument("--comet_optimizer_id", type=str, help="Comet: ID of the Comet Optimizer sweep.")
parser.add_argument("--comet_optimizer_objective", type=str, help="Comet: Set to 'minimize' or 'maximize'.")
parser.add_argument("--comet_optimizer_metric", type=str, help="Comet: Metric to Optimize.")
parser.add_argument(
"--comet_optimizer_workers",
type=int,
default=1,
help="Comet: Number of Parallel Workers to use with the Comet Optimizer.",
)
return parser.parse_known_args()[0] if known else parser.parse_args()
def run(parameters, opt):
"""Executes YOLOv5 training with given hyperparameters and options, setting up device and training directories."""
hyp_dict = {k: v for k, v in parameters.items() if k not in ["epochs", "batch_size"]}
opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok or opt.evolve))
opt.batch_size = parameters.get("batch_size")
opt.epochs = parameters.get("epochs")
device = select_device(opt.device, batch_size=opt.batch_size)
train(hyp_dict, opt, device, callbacks=Callbacks())
if __name__ == "__main__":
opt = get_args(known=True)
opt.weights = str(opt.weights)
opt.cfg = str(opt.cfg)
opt.data = str(opt.data)
opt.project = str(opt.project)
optimizer_id = os.getenv("COMET_OPTIMIZER_ID")
if optimizer_id is None:
with open(opt.comet_optimizer_config) as f:
optimizer_config = json.load(f)
optimizer = comet_ml.Optimizer(optimizer_config)
else:
optimizer = comet_ml.Optimizer(optimizer_id)
opt.comet_optimizer_id = optimizer.id
status = optimizer.status()
opt.comet_optimizer_objective = status["spec"]["objective"]
opt.comet_optimizer_metric = status["spec"]["metric"]
logger.info("COMET INFO: Starting Hyperparameter Sweep")
for parameter in optimizer.get_parameters():
run(parameter["parameters"], opt)
================================================
FILE: utils/loggers/wandb/__init__.py
================================================
================================================
FILE: utils/loggers/wandb/wandb_utils.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# WARNING ⚠️ wandb is deprecated and will be removed in future release.
# See supported integrations at https://github.com/ultralytics/yolov5#integrations
import logging
import os
import sys
from contextlib import contextmanager
from pathlib import Path
from utils.general import LOGGER, colorstr
FILE = Path(__file__).resolve()
ROOT = FILE.parents[3] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
RANK = int(os.getenv("RANK", -1))
DEPRECATION_WARNING = (
f"{colorstr('wandb')}: WARNING ⚠️ wandb is deprecated and will be removed in a future release. "
f'See supported integrations at https://github.com/ultralytics/yolov5#integrations.'
)
try:
import wandb
assert hasattr(wandb, "__version__") # verify package import not local dir
LOGGER.warning(DEPRECATION_WARNING)
except (ImportError, AssertionError):
wandb = None
class WandbLogger:
"""
Log training runs, datasets, models, and predictions to Weights & Biases.
This logger sends information to W&B at wandb.ai. By default, this information includes hyperparameters, system
configuration and metrics, model metrics, and basic data metrics and analyses.
By providing additional command line arguments to train.py, datasets, models and predictions can also be logged.
For more on how this logger is used, see the Weights & Biases documentation:
https://docs.wandb.com/guides/integrations/yolov5
"""
def __init__(self, opt, run_id=None, job_type="Training"):
"""
- Initialize WandbLogger instance
- Upload dataset if opt.upload_dataset is True
- Setup training processes if job_type is 'Training'
arguments:
opt (namespace) -- Commandline arguments for this run
run_id (str) -- Run ID of W&B run to be resumed
job_type (str) -- To set the job_type for this run
"""
# Pre-training routine --
self.job_type = job_type
self.wandb, self.wandb_run = wandb, wandb.run if wandb else None
self.val_artifact, self.train_artifact = None, None
self.train_artifact_path, self.val_artifact_path = None, None
self.result_artifact = None
self.val_table, self.result_table = None, None
self.max_imgs_to_log = 16
self.data_dict = None
if self.wandb:
self.wandb_run = wandb.run or wandb.init(
config=opt,
resume="allow",
project="YOLOv5" if opt.project == "runs/train" else Path(opt.project).stem,
entity=opt.entity,
name=opt.name if opt.name != "exp" else None,
job_type=job_type,
id=run_id,
allow_val_change=True,
)
if self.wandb_run and self.job_type == "Training":
if isinstance(opt.data, dict):
# This means another dataset manager has already processed the dataset info (e.g. ClearML)
# and they will have stored the already processed dict in opt.data
self.data_dict = opt.data
self.setup_training(opt)
def setup_training(self, opt):
"""
Setup the necessary processes for training YOLO models:
- Attempt to download model checkpoint and dataset artifacts if opt.resume stats with WANDB_ARTIFACT_PREFIX
- Update data_dict, to contain info of previous run if resumed and the paths of dataset artifact if downloaded
- Setup log_dict, initialize bbox_interval
arguments:
opt (namespace) -- commandline arguments for this run
"""
self.log_dict, self.current_epoch = {}, 0
self.bbox_interval = opt.bbox_interval
if isinstance(opt.resume, str):
model_dir, _ = self.download_model_artifact(opt)
if model_dir:
self.weights = Path(model_dir) / "last.pt"
config = self.wandb_run.config
opt.weights, opt.save_period, opt.batch_size, opt.bbox_interval, opt.epochs, opt.hyp, opt.imgsz = (
str(self.weights),
config.save_period,
config.batch_size,
config.bbox_interval,
config.epochs,
config.hyp,
config.imgsz,
)
if opt.bbox_interval == -1:
self.bbox_interval = opt.bbox_interval = (opt.epochs // 10) if opt.epochs > 10 else 1
if opt.evolve or opt.noplots:
self.bbox_interval = opt.bbox_interval = opt.epochs + 1 # disable bbox_interval
def log_model(self, path, opt, epoch, fitness_score, best_model=False):
"""
Log the model checkpoint as W&B artifact.
arguments:
path (Path) -- Path of directory containing the checkpoints
opt (namespace) -- Command line arguments for this run
epoch (int) -- Current epoch number
fitness_score (float) -- fitness score for current epoch
best_model (boolean) -- Boolean representing if the current checkpoint is the best yet.
"""
model_artifact = wandb.Artifact(
f"run_{wandb.run.id}_model",
type="model",
metadata={
"original_url": str(path),
"epochs_trained": epoch + 1,
"save period": opt.save_period,
"project": opt.project,
"total_epochs": opt.epochs,
"fitness_score": fitness_score,
},
)
model_artifact.add_file(str(path / "last.pt"), name="last.pt")
wandb.log_artifact(
model_artifact,
aliases=[
"latest",
"last",
f"epoch {str(self.current_epoch)}",
"best" if best_model else "",
],
)
LOGGER.info(f"Saving model artifact on epoch {epoch + 1}")
def val_one_image(self, pred, predn, path, names, im):
"""Evaluates model prediction for a single image, returning metrics and visualizations."""
pass
def log(self, log_dict):
"""
Save the metrics to the logging dictionary.
arguments:
log_dict (Dict) -- metrics/media to be logged in current step
"""
if self.wandb_run:
for key, value in log_dict.items():
self.log_dict[key] = value
def end_epoch(self):
"""
Commit the log_dict, model artifacts and Tables to W&B and flush the log_dict.
arguments:
best_result (boolean): Boolean representing if the result of this evaluation is best or not
"""
if self.wandb_run:
with all_logging_disabled():
try:
wandb.log(self.log_dict)
except BaseException as e:
LOGGER.info(
f"An error occurred in wandb logger. The training will proceed without interruption. More info\n{e}"
)
self.wandb_run.finish()
self.wandb_run = None
self.log_dict = {}
def finish_run(self):
"""Log metrics if any and finish the current W&B run."""
if self.wandb_run:
if self.log_dict:
with all_logging_disabled():
wandb.log(self.log_dict)
wandb.run.finish()
LOGGER.warning(DEPRECATION_WARNING)
@contextmanager
def all_logging_disabled(highest_level=logging.CRITICAL):
"""source - https://gist.github.com/simon-weber/7853144
A context manager that will prevent any logging messages triggered during the body from being processed.
:param highest_level: the maximum logging level in use.
This would only need to be changed if a custom level greater than CRITICAL is defined.
"""
previous_level = logging.root.manager.disable
logging.disable(highest_level)
try:
yield
finally:
logging.disable(previous_level)
================================================
FILE: utils/loss.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Loss functions."""
import torch
import torch.nn as nn
from utils.metrics import bbox_iou
from utils.torch_utils import de_parallel
def smooth_BCE(eps=0.1):
"""Returns label smoothing BCE targets for reducing overfitting; pos: `1.0 - 0.5*eps`, neg: `0.5*eps`. For details see https://github.com/ultralytics/yolov3/issues/238#issuecomment-598028441"""
return 1.0 - 0.5 * eps, 0.5 * eps
class BCEBlurWithLogitsLoss(nn.Module):
# BCEwithLogitLoss() with reduced missing label effects.
def __init__(self, alpha=0.05):
"""Initializes a modified BCEWithLogitsLoss with reduced missing label effects, taking optional alpha smoothing
parameter.
"""
super().__init__()
self.loss_fcn = nn.BCEWithLogitsLoss(reduction="none") # must be nn.BCEWithLogitsLoss()
self.alpha = alpha
def forward(self, pred, true):
"""Computes modified BCE loss for YOLOv5 with reduced missing label effects, taking pred and true tensors,
returns mean loss.
"""
loss = self.loss_fcn(pred, true)
pred = torch.sigmoid(pred) # prob from logits
dx = pred - true # reduce only missing label effects
# dx = (pred - true).abs() # reduce missing label and false label effects
alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
loss *= alpha_factor
return loss.mean()
class FocalLoss(nn.Module):
# Wraps focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
"""Initializes FocalLoss with specified loss function, gamma, and alpha values; modifies loss reduction to
'none'.
"""
super().__init__()
self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
self.gamma = gamma
self.alpha = alpha
self.reduction = loss_fcn.reduction
self.loss_fcn.reduction = "none" # required to apply FL to each element
def forward(self, pred, true):
"""Calculates the focal loss between predicted and true labels using a modified BCEWithLogitsLoss."""
loss = self.loss_fcn(pred, true)
# p_t = torch.exp(-loss)
# loss *= self.alpha * (1.000001 - p_t) ** self.gamma # non-zero power for gradient stability
# TF implementation https://github.com/tensorflow/addons/blob/v0.7.1/tensorflow_addons/losses/focal_loss.py
pred_prob = torch.sigmoid(pred) # prob from logits
p_t = true * pred_prob + (1 - true) * (1 - pred_prob)
alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
modulating_factor = (1.0 - p_t) ** self.gamma
loss *= alpha_factor * modulating_factor
if self.reduction == "mean":
return loss.mean()
elif self.reduction == "sum":
return loss.sum()
else: # 'none'
return loss
class QFocalLoss(nn.Module):
# Wraps Quality focal loss around existing loss_fcn(), i.e. criteria = FocalLoss(nn.BCEWithLogitsLoss(), gamma=1.5)
def __init__(self, loss_fcn, gamma=1.5, alpha=0.25):
"""Initializes Quality Focal Loss with given loss function, gamma, alpha; modifies reduction to 'none'."""
super().__init__()
self.loss_fcn = loss_fcn # must be nn.BCEWithLogitsLoss()
self.gamma = gamma
self.alpha = alpha
self.reduction = loss_fcn.reduction
self.loss_fcn.reduction = "none" # required to apply FL to each element
def forward(self, pred, true):
"""Computes the focal loss between `pred` and `true` using BCEWithLogitsLoss, adjusting for imbalance with
`gamma` and `alpha`.
"""
loss = self.loss_fcn(pred, true)
pred_prob = torch.sigmoid(pred) # prob from logits
alpha_factor = true * self.alpha + (1 - true) * (1 - self.alpha)
modulating_factor = torch.abs(true - pred_prob) ** self.gamma
loss *= alpha_factor * modulating_factor
if self.reduction == "mean":
return loss.mean()
elif self.reduction == "sum":
return loss.sum()
else: # 'none'
return loss
class ComputeLoss:
sort_obj_iou = False
# Compute losses
def __init__(self, model, autobalance=False):
"""Initializes ComputeLoss with model and autobalance option, autobalances losses if True."""
device = next(model.parameters()).device # get model device
h = model.hyp # hyperparameters
# Define criteria
BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["cls_pw"]], device=device))
BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["obj_pw"]], device=device))
# Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
self.cp, self.cn = smooth_BCE(eps=h.get("label_smoothing", 0.0)) # positive, negative BCE targets
# Focal loss
g = h["fl_gamma"] # focal loss gamma
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
m = de_parallel(model).model[-1] # Detect() module
self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
self.na = m.na # number of anchors
self.nc = m.nc # number of classes
self.nl = m.nl # number of layers
self.anchors = m.anchors
self.device = device
def __call__(self, p, targets): # predictions, targets
"""Performs forward pass, calculating class, box, and object loss for given predictions and targets."""
lcls = torch.zeros(1, device=self.device) # class loss
lbox = torch.zeros(1, device=self.device) # box loss
lobj = torch.zeros(1, device=self.device) # object loss
tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets
# Losses
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
n = b.shape[0] # number of targets
if n:
# pxy, pwh, _, pcls = pi[b, a, gj, gi].tensor_split((2, 4, 5), dim=1) # faster, requires torch 1.8.0
pxy, pwh, _, pcls = pi[b, a, gj, gi].split((2, 2, 1, self.nc), 1) # target-subset of predictions
# Regression
pxy = pxy.sigmoid() * 2 - 0.5
pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
# Objectness
iou = iou.detach().clamp(0).type(tobj.dtype)
if self.sort_obj_iou:
j = iou.argsort()
b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
if self.gr < 1:
iou = (1.0 - self.gr) + self.gr * iou
tobj[b, a, gj, gi] = iou # iou ratio
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
t = torch.full_like(pcls, self.cn, device=self.device) # targets
t[range(n), tcls[i]] = self.cp
lcls += self.BCEcls(pcls, t) # BCE
# Append targets to text file
# with open('targets.txt', 'a') as file:
# [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
obji = self.BCEobj(pi[..., 4], tobj)
lobj += obji * self.balance[i] # obj loss
if self.autobalance:
self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
if self.autobalance:
self.balance = [x / self.balance[self.ssi] for x in self.balance]
lbox *= self.hyp["box"]
lobj *= self.hyp["obj"]
lcls *= self.hyp["cls"]
bs = tobj.shape[0] # batch size
return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
def build_targets(self, p, targets):
"""Prepares model targets from input targets (image,class,x,y,w,h) for loss computation, returning class, box,
indices, and anchors.
"""
na, nt = self.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch = [], [], [], []
gain = torch.ones(7, device=self.device) # normalized to gridspace gain
ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None]), 2) # append anchor indices
g = 0.5 # bias
off = (
torch.tensor(
[
[0, 0],
[1, 0],
[0, 1],
[-1, 0],
[0, -1], # j,k,l,m
# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
],
device=self.device,
).float()
* g
) # offsets
for i in range(self.nl):
anchors, shape = self.anchors[i], p[i].shape
gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
# Match targets to anchors
t = targets * gain # shape(3,n,7)
if nt:
# Matches
r = t[..., 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1 / r).max(2)[0] < self.hyp["anchor_t"] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filter
# Offsets
gxy = t[:, 2:4] # grid xy
gxi = gain[[2, 3]] - gxy # inverse
j, k = ((gxy % 1 < g) & (gxy > 1)).T
l, m = ((gxi % 1 < g) & (gxi > 1)).T
j = torch.stack((torch.ones_like(j), j, k, l, m))
t = t.repeat((5, 1, 1))[j]
offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
else:
t = targets[0]
offsets = 0
# Define
bc, gxy, gwh, a = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
a, (b, c) = a.long().view(-1), bc.long().T # anchors, image, class
gij = (gxy - offsets).long()
gi, gj = gij.T # grid indices
# Append
indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
anch.append(anchors[a]) # anchors
tcls.append(c) # class
return tcls, tbox, indices, anch
================================================
FILE: utils/metrics.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Model validation metrics."""
import math
import warnings
from pathlib import Path
import matplotlib.pyplot as plt
import numpy as np
import torch
from utils import TryExcept, threaded
def fitness(x):
"""Calculates fitness of a model using weighted sum of metrics P, R, mAP@0.5, mAP@0.5:0.95."""
w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, mAP@0.5, mAP@0.5:0.95]
return (x[:, :4] * w).sum(1)
def smooth(y, f=0.05):
"""Applies box filter smoothing to array `y` with fraction `f`, yielding a smoothed array."""
nf = round(len(y) * f * 2) // 2 + 1 # number of filter elements (must be odd)
p = np.ones(nf // 2) # ones padding
yp = np.concatenate((p * y[0], y, p * y[-1]), 0) # y padded
return np.convolve(yp, np.ones(nf) / nf, mode="valid") # y-smoothed
def ap_per_class(tp, conf, pred_cls, target_cls, plot=False, save_dir=".", names=(), eps=1e-16, prefix=""):
"""
Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
tp: True positives (nparray, nx1 or nx10).
conf: Objectness value from 0-1 (nparray).
pred_cls: Predicted object classes (nparray).
target_cls: True object classes (nparray).
plot: Plot precision-recall curve at mAP@0.5
save_dir: Plot save directory
# Returns
The average precision as computed in py-faster-rcnn.
"""
# Sort by objectness
i = np.argsort(-conf)
tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
# Find unique classes
unique_classes, nt = np.unique(target_cls, return_counts=True)
nc = unique_classes.shape[0] # number of classes, number of detections
# Create Precision-Recall curve and compute AP for each class
px, py = np.linspace(0, 1, 1000), [] # for plotting
ap, p, r = np.zeros((nc, tp.shape[1])), np.zeros((nc, 1000)), np.zeros((nc, 1000))
for ci, c in enumerate(unique_classes):
i = pred_cls == c
n_l = nt[ci] # number of labels
n_p = i.sum() # number of predictions
if n_p == 0 or n_l == 0:
continue
# Accumulate FPs and TPs
fpc = (1 - tp[i]).cumsum(0)
tpc = tp[i].cumsum(0)
# Recall
recall = tpc / (n_l + eps) # recall curve
r[ci] = np.interp(-px, -conf[i], recall[:, 0], left=0) # negative x, xp because xp decreases
# Precision
precision = tpc / (tpc + fpc) # precision curve
p[ci] = np.interp(-px, -conf[i], precision[:, 0], left=1) # p at pr_score
# AP from recall-precision curve
for j in range(tp.shape[1]):
ap[ci, j], mpre, mrec = compute_ap(recall[:, j], precision[:, j])
if plot and j == 0:
py.append(np.interp(px, mrec, mpre)) # precision at mAP@0.5
# Compute F1 (harmonic mean of precision and recall)
f1 = 2 * p * r / (p + r + eps)
names = [v for k, v in names.items() if k in unique_classes] # list: only classes that have data
names = dict(enumerate(names)) # to dict
if plot:
plot_pr_curve(px, py, ap, Path(save_dir) / f"{prefix}PR_curve.png", names)
plot_mc_curve(px, f1, Path(save_dir) / f"{prefix}F1_curve.png", names, ylabel="F1")
plot_mc_curve(px, p, Path(save_dir) / f"{prefix}P_curve.png", names, ylabel="Precision")
plot_mc_curve(px, r, Path(save_dir) / f"{prefix}R_curve.png", names, ylabel="Recall")
i = smooth(f1.mean(0), 0.1).argmax() # max F1 index
p, r, f1 = p[:, i], r[:, i], f1[:, i]
tp = (r * nt).round() # true positives
fp = (tp / (p + eps) - tp).round() # false positives
return tp, fp, p, r, f1, ap, unique_classes.astype(int)
def compute_ap(recall, precision):
"""Compute the average precision, given the recall and precision curves
# Arguments
recall: The recall curve (list)
precision: The precision curve (list)
# Returns
Average precision, precision curve, recall curve
"""
# Append sentinel values to beginning and end
mrec = np.concatenate(([0.0], recall, [1.0]))
mpre = np.concatenate(([1.0], precision, [0.0]))
# Compute the precision envelope
mpre = np.flip(np.maximum.accumulate(np.flip(mpre)))
# Integrate area under curve
method = "interp" # methods: 'continuous', 'interp'
if method == "interp":
x = np.linspace(0, 1, 101) # 101-point interp (COCO)
ap = np.trapz(np.interp(x, mrec, mpre), x) # integrate
else: # 'continuous'
i = np.where(mrec[1:] != mrec[:-1])[0] # points where x axis (recall) changes
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) # area under curve
return ap, mpre, mrec
class ConfusionMatrix:
# Updated version of https://github.com/kaanakan/object_detection_confusion_matrix
def __init__(self, nc, conf=0.25, iou_thres=0.45):
"""Initializes ConfusionMatrix with given number of classes, confidence, and IoU threshold."""
self.matrix = np.zeros((nc + 1, nc + 1))
self.nc = nc # number of classes
self.conf = conf
self.iou_thres = iou_thres
def process_batch(self, detections, labels):
"""
Return intersection-over-union (Jaccard index) of boxes.
Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
Arguments:
detections (Array[N, 6]), x1, y1, x2, y2, conf, class
labels (Array[M, 5]), class, x1, y1, x2, y2
Returns:
None, updates confusion matrix accordingly
"""
if detections is None:
gt_classes = labels.int()
for gc in gt_classes:
self.matrix[self.nc, gc] += 1 # background FN
return
detections = detections[detections[:, 4] > self.conf]
gt_classes = labels[:, 0].int()
detection_classes = detections[:, 5].int()
iou = box_iou(labels[:, 1:], detections[:, :4])
x = torch.where(iou > self.iou_thres)
if x[0].shape[0]:
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy()
if x[0].shape[0] > 1:
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
else:
matches = np.zeros((0, 3))
n = matches.shape[0] > 0
m0, m1, _ = matches.transpose().astype(int)
for i, gc in enumerate(gt_classes):
j = m0 == i
if n and sum(j) == 1:
self.matrix[detection_classes[m1[j]], gc] += 1 # correct
else:
self.matrix[self.nc, gc] += 1 # true background
if n:
for i, dc in enumerate(detection_classes):
if not any(m1 == i):
self.matrix[dc, self.nc] += 1 # predicted background
def tp_fp(self):
"""Calculates true positives (tp) and false positives (fp) excluding the background class from the confusion
matrix.
"""
tp = self.matrix.diagonal() # true positives
fp = self.matrix.sum(1) - tp # false positives
# fn = self.matrix.sum(0) - tp # false negatives (missed detections)
return tp[:-1], fp[:-1] # remove background class
@TryExcept("WARNING ⚠️ ConfusionMatrix plot failure")
def plot(self, normalize=True, save_dir="", names=()):
"""Plots confusion matrix using seaborn, optional normalization; can save plot to specified directory."""
import seaborn as sn
array = self.matrix / ((self.matrix.sum(0).reshape(1, -1) + 1e-9) if normalize else 1) # normalize columns
array[array < 0.005] = np.nan # don't annotate (would appear as 0.00)
fig, ax = plt.subplots(1, 1, figsize=(12, 9), tight_layout=True)
nc, nn = self.nc, len(names) # number of classes, names
sn.set(font_scale=1.0 if nc < 50 else 0.8) # for label size
labels = (0 < nn < 99) and (nn == nc) # apply names to ticklabels
ticklabels = (names + ["background"]) if labels else "auto"
with warnings.catch_warnings():
warnings.simplefilter("ignore") # suppress empty matrix RuntimeWarning: All-NaN slice encountered
sn.heatmap(
array,
ax=ax,
annot=nc < 30,
annot_kws={"size": 8},
cmap="Blues",
fmt=".2f",
square=True,
vmin=0.0,
xticklabels=ticklabels,
yticklabels=ticklabels,
).set_facecolor((1, 1, 1))
ax.set_xlabel("True")
ax.set_ylabel("Predicted")
ax.set_title("Confusion Matrix")
fig.savefig(Path(save_dir) / "confusion_matrix.png", dpi=250)
plt.close(fig)
def print(self):
"""Prints the confusion matrix row-wise, with each class and its predictions separated by spaces."""
for i in range(self.nc + 1):
print(" ".join(map(str, self.matrix[i])))
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
"""
Calculates IoU, GIoU, DIoU, or CIoU between two boxes, supporting xywh/xyxy formats.
Input shapes are box1(1,4) to box2(n,4).
"""
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * (
b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)
).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
# IoU
iou = inter / union
if CIoU or DIoU or GIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw**2 + ch**2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi**2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
def box_iou(box1, box2, eps=1e-7):
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
"""
Return intersection-over-union (Jaccard index) of boxes.
Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
Arguments:
box1 (Tensor[N, 4])
box2 (Tensor[M, 4])
Returns:
iou (Tensor[N, M]): the NxM matrix containing the pairwise
IoU values for every element in boxes1 and boxes2
"""
# inter(N,M) = (rb(N,M,2) - lt(N,M,2)).clamp(0).prod(2)
(a1, a2), (b1, b2) = box1.unsqueeze(1).chunk(2, 2), box2.unsqueeze(0).chunk(2, 2)
inter = (torch.min(a2, b2) - torch.max(a1, b1)).clamp(0).prod(2)
# IoU = inter / (area1 + area2 - inter)
return inter / ((a2 - a1).prod(2) + (b2 - b1).prod(2) - inter + eps)
def bbox_ioa(box1, box2, eps=1e-7):
"""
Returns the intersection over box2 area given box1, box2.
Boxes are x1y1x2y2
box1: np.array of shape(4)
box2: np.array of shape(nx4)
returns: np.array of shape(n)
"""
# Get the coordinates of bounding boxes
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2.T
# Intersection area
inter_area = (np.minimum(b1_x2, b2_x2) - np.maximum(b1_x1, b2_x1)).clip(0) * (
np.minimum(b1_y2, b2_y2) - np.maximum(b1_y1, b2_y1)
).clip(0)
# box2 area
box2_area = (b2_x2 - b2_x1) * (b2_y2 - b2_y1) + eps
# Intersection over box2 area
return inter_area / box2_area
def wh_iou(wh1, wh2, eps=1e-7):
"""Calculates the Intersection over Union (IoU) for two sets of widths and heights; `wh1` and `wh2` should be nx2
and mx2 tensors.
"""
wh1 = wh1[:, None] # [N,1,2]
wh2 = wh2[None] # [1,M,2]
inter = torch.min(wh1, wh2).prod(2) # [N,M]
return inter / (wh1.prod(2) + wh2.prod(2) - inter + eps) # iou = inter / (area1 + area2 - inter)
# Plots ----------------------------------------------------------------------------------------------------------------
@threaded
def plot_pr_curve(px, py, ap, save_dir=Path("pr_curve.png"), names=()):
"""Plots precision-recall curve, optionally per class, saving to `save_dir`; `px`, `py` are lists, `ap` is Nx2
array, `names` optional.
"""
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
py = np.stack(py, axis=1)
if 0 < len(names) < 21: # display per-class legend if < 21 classes
for i, y in enumerate(py.T):
ax.plot(px, y, linewidth=1, label=f"{names[i]} {ap[i, 0]:.3f}") # plot(recall, precision)
else:
ax.plot(px, py, linewidth=1, color="grey") # plot(recall, precision)
ax.plot(px, py.mean(1), linewidth=3, color="blue", label="all classes %.3f mAP@0.5" % ap[:, 0].mean())
ax.set_xlabel("Recall")
ax.set_ylabel("Precision")
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
ax.set_title("Precision-Recall Curve")
fig.savefig(save_dir, dpi=250)
plt.close(fig)
@threaded
def plot_mc_curve(px, py, save_dir=Path("mc_curve.png"), names=(), xlabel="Confidence", ylabel="Metric"):
"""Plots a metric-confidence curve for model predictions, supporting per-class visualization and smoothing."""
fig, ax = plt.subplots(1, 1, figsize=(9, 6), tight_layout=True)
if 0 < len(names) < 21: # display per-class legend if < 21 classes
for i, y in enumerate(py):
ax.plot(px, y, linewidth=1, label=f"{names[i]}") # plot(confidence, metric)
else:
ax.plot(px, py.T, linewidth=1, color="grey") # plot(confidence, metric)
y = smooth(py.mean(0), 0.05)
ax.plot(px, y, linewidth=3, color="blue", label=f"all classes {y.max():.2f} at {px[y.argmax()]:.3f}")
ax.set_xlabel(xlabel)
ax.set_ylabel(ylabel)
ax.set_xlim(0, 1)
ax.set_ylim(0, 1)
ax.legend(bbox_to_anchor=(1.04, 1), loc="upper left")
ax.set_title(f"{ylabel}-Confidence Curve")
fig.savefig(save_dir, dpi=250)
plt.close(fig)
================================================
FILE: utils/plots.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Plotting utils."""
import contextlib
import math
import os
from copy import copy
from pathlib import Path
import cv2
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import seaborn as sn
import torch
from PIL import Image, ImageDraw
from scipy.ndimage.filters import gaussian_filter1d
from ultralytics.utils.plotting import Annotator
from utils import TryExcept, threaded
from utils.general import LOGGER, clip_boxes, increment_path, xywh2xyxy, xyxy2xywh
from utils.metrics import fitness
# Settings
RANK = int(os.getenv("RANK", -1))
matplotlib.rc("font", **{"size": 11})
matplotlib.use("Agg") # for writing to files only
class Colors:
# Ultralytics color palette https://ultralytics.com/
def __init__(self):
"""
Initializes the Colors class with a palette derived from Ultralytics color scheme, converting hex codes to RGB.
Colors derived from `hex = matplotlib.colors.TABLEAU_COLORS.values()`.
"""
hexs = (
"FF3838",
"FF9D97",
"FF701F",
"FFB21D",
"CFD231",
"48F90A",
"92CC17",
"3DDB86",
"1A9334",
"00D4BB",
"2C99A8",
"00C2FF",
"344593",
"6473FF",
"0018EC",
"8438FF",
"520085",
"CB38FF",
"FF95C8",
"FF37C7",
)
self.palette = [self.hex2rgb(f"#{c}") for c in hexs]
self.n = len(self.palette)
def __call__(self, i, bgr=False):
"""Returns color from palette by index `i`, in BGR format if `bgr=True`, else RGB; `i` is an integer index."""
c = self.palette[int(i) % self.n]
return (c[2], c[1], c[0]) if bgr else c
@staticmethod
def hex2rgb(h):
"""Converts hexadecimal color `h` to an RGB tuple (PIL-compatible) with order (R, G, B)."""
return tuple(int(h[1 + i : 1 + i + 2], 16) for i in (0, 2, 4))
colors = Colors() # create instance for 'from utils.plots import colors'
def feature_visualization(x, module_type, stage, n=32, save_dir=Path("runs/detect/exp")):
"""
x: Features to be visualized
module_type: Module type
stage: Module stage within model
n: Maximum number of feature maps to plot
save_dir: Directory to save results
"""
if ("Detect" not in module_type) and (
"Segment" not in module_type
): # 'Detect' for Object Detect task,'Segment' for Segment task
batch, channels, height, width = x.shape # batch, channels, height, width
if height > 1 and width > 1:
f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
n = min(n, channels) # number of plots
fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
ax = ax.ravel()
plt.subplots_adjust(wspace=0.05, hspace=0.05)
for i in range(n):
ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
ax[i].axis("off")
LOGGER.info(f"Saving {f}... ({n}/{channels})")
plt.savefig(f, dpi=300, bbox_inches="tight")
plt.close()
np.save(str(f.with_suffix(".npy")), x[0].cpu().numpy()) # npy save
def hist2d(x, y, n=100):
"""
Generates a logarithmic 2D histogram, useful for visualizing label or evolution distributions.
Used in used in labels.png and evolve.png.
"""
xedges, yedges = np.linspace(x.min(), x.max(), n), np.linspace(y.min(), y.max(), n)
hist, xedges, yedges = np.histogram2d(x, y, (xedges, yedges))
xidx = np.clip(np.digitize(x, xedges) - 1, 0, hist.shape[0] - 1)
yidx = np.clip(np.digitize(y, yedges) - 1, 0, hist.shape[1] - 1)
return np.log(hist[xidx, yidx])
def butter_lowpass_filtfilt(data, cutoff=1500, fs=50000, order=5):
"""Applies a low-pass Butterworth filter to `data` with specified `cutoff`, `fs`, and `order`."""
from scipy.signal import butter, filtfilt
# https://stackoverflow.com/questions/28536191/how-to-filter-smooth-with-scipy-numpy
def butter_lowpass(cutoff, fs, order):
nyq = 0.5 * fs
normal_cutoff = cutoff / nyq
return butter(order, normal_cutoff, btype="low", analog=False)
b, a = butter_lowpass(cutoff, fs, order=order)
return filtfilt(b, a, data) # forward-backward filter
def output_to_target(output, max_det=300):
"""Converts YOLOv5 model output to [batch_id, class_id, x, y, w, h, conf] format for plotting, limiting detections
to `max_det`.
"""
targets = []
for i, o in enumerate(output):
box, conf, cls = o[:max_det, :6].cpu().split((4, 1, 1), 1)
j = torch.full((conf.shape[0], 1), i)
targets.append(torch.cat((j, cls, xyxy2xywh(box), conf), 1))
return torch.cat(targets, 0).numpy()
@threaded
def plot_images(images, targets, paths=None, fname="images.jpg", names=None):
"""Plots an image grid with labels from YOLOv5 predictions or targets, saving to `fname`."""
if isinstance(images, torch.Tensor):
images = images.cpu().float().numpy()
if isinstance(targets, torch.Tensor):
targets = targets.cpu().numpy()
max_size = 1920 # max image size
max_subplots = 16 # max image subplots, i.e. 4x4
bs, _, h, w = images.shape # batch size, _, height, width
bs = min(bs, max_subplots) # limit plot images
ns = np.ceil(bs**0.5) # number of subplots (square)
if np.max(images[0]) <= 1:
images *= 255 # de-normalise (optional)
# Build Image
mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
for i, im in enumerate(images):
if i == max_subplots: # if last batch has fewer images than we expect
break
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
im = im.transpose(1, 2, 0)
mosaic[y : y + h, x : x + w, :] = im
# Resize (optional)
scale = max_size / ns / max(h, w)
if scale < 1:
h = math.ceil(scale * h)
w = math.ceil(scale * w)
mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
# Annotate
fs = int((h + w) * ns * 0.01) # font size
annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
for i in range(i + 1):
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
if paths:
annotator.text([x + 5, y + 5], text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
if len(targets) > 0:
ti = targets[targets[:, 0] == i] # image targets
boxes = xywh2xyxy(ti[:, 2:6]).T
classes = ti[:, 1].astype("int")
labels = ti.shape[1] == 6 # labels if no conf column
conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
if boxes.shape[1]:
if boxes.max() <= 1.01: # if normalized with tolerance 0.01
boxes[[0, 2]] *= w # scale to pixels
boxes[[1, 3]] *= h
elif scale < 1: # absolute coords need scale if image scales
boxes *= scale
boxes[[0, 2]] += x
boxes[[1, 3]] += y
for j, box in enumerate(boxes.T.tolist()):
cls = classes[j]
color = colors(cls)
cls = names[cls] if names else cls
if labels or conf[j] > 0.25: # 0.25 conf thresh
label = f"{cls}" if labels else f"{cls} {conf[j]:.1f}"
annotator.box_label(box, label, color=color)
annotator.im.save(fname) # save
def plot_lr_scheduler(optimizer, scheduler, epochs=300, save_dir=""):
"""Plots learning rate schedule for given optimizer and scheduler, saving plot to `save_dir`."""
optimizer, scheduler = copy(optimizer), copy(scheduler) # do not modify originals
y = []
for _ in range(epochs):
scheduler.step()
y.append(optimizer.param_groups[0]["lr"])
plt.plot(y, ".-", label="LR")
plt.xlabel("epoch")
plt.ylabel("LR")
plt.grid()
plt.xlim(0, epochs)
plt.ylim(0)
plt.savefig(Path(save_dir) / "LR.png", dpi=200)
plt.close()
def plot_val_txt():
"""
Plots 2D and 1D histograms of bounding box centers from 'val.txt' using matplotlib, saving as 'hist2d.png' and
'hist1d.png'.
Example: from utils.plots import *; plot_val()
"""
x = np.loadtxt("val.txt", dtype=np.float32)
box = xyxy2xywh(x[:, :4])
cx, cy = box[:, 0], box[:, 1]
fig, ax = plt.subplots(1, 1, figsize=(6, 6), tight_layout=True)
ax.hist2d(cx, cy, bins=600, cmax=10, cmin=0)
ax.set_aspect("equal")
plt.savefig("hist2d.png", dpi=300)
fig, ax = plt.subplots(1, 2, figsize=(12, 6), tight_layout=True)
ax[0].hist(cx, bins=600)
ax[1].hist(cy, bins=600)
plt.savefig("hist1d.png", dpi=200)
def plot_targets_txt():
"""
Plots histograms of object detection targets from 'targets.txt', saving the figure as 'targets.jpg'.
Example: from utils.plots import *; plot_targets_txt()
"""
x = np.loadtxt("targets.txt", dtype=np.float32).T
s = ["x targets", "y targets", "width targets", "height targets"]
fig, ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)
ax = ax.ravel()
for i in range(4):
ax[i].hist(x[i], bins=100, label=f"{x[i].mean():.3g} +/- {x[i].std():.3g}")
ax[i].legend()
ax[i].set_title(s[i])
plt.savefig("targets.jpg", dpi=200)
def plot_val_study(file="", dir="", x=None):
"""
Plots validation study results from 'study*.txt' files in a directory or a specific file, comparing model
performance and speed.
Example: from utils.plots import *; plot_val_study()
"""
save_dir = Path(file).parent if file else Path(dir)
plot2 = False # plot additional results
if plot2:
ax = plt.subplots(2, 4, figsize=(10, 6), tight_layout=True)[1].ravel()
fig2, ax2 = plt.subplots(1, 1, figsize=(8, 4), tight_layout=True)
# for f in [save_dir / f'study_coco_{x}.txt' for x in ['yolov5n6', 'yolov5s6', 'yolov5m6', 'yolov5l6', 'yolov5x6']]:
for f in sorted(save_dir.glob("study*.txt")):
y = np.loadtxt(f, dtype=np.float32, usecols=[0, 1, 2, 3, 7, 8, 9], ndmin=2).T
x = np.arange(y.shape[1]) if x is None else np.array(x)
if plot2:
s = ["P", "R", "mAP@.5", "mAP@.5:.95", "t_preprocess (ms/img)", "t_inference (ms/img)", "t_NMS (ms/img)"]
for i in range(7):
ax[i].plot(x, y[i], ".-", linewidth=2, markersize=8)
ax[i].set_title(s[i])
j = y[3].argmax() + 1
ax2.plot(
y[5, 1:j],
y[3, 1:j] * 1e2,
".-",
linewidth=2,
markersize=8,
label=f.stem.replace("study_coco_", "").replace("yolo", "YOLO"),
)
ax2.plot(
1e3 / np.array([209, 140, 97, 58, 35, 18]),
[34.6, 40.5, 43.0, 47.5, 49.7, 51.5],
"k.-",
linewidth=2,
markersize=8,
alpha=0.25,
label="EfficientDet",
)
ax2.grid(alpha=0.2)
ax2.set_yticks(np.arange(20, 60, 5))
ax2.set_xlim(0, 57)
ax2.set_ylim(25, 55)
ax2.set_xlabel("GPU Speed (ms/img)")
ax2.set_ylabel("COCO AP val")
ax2.legend(loc="lower right")
f = save_dir / "study.png"
print(f"Saving {f}...")
plt.savefig(f, dpi=300)
@TryExcept() # known issue https://github.com/ultralytics/yolov5/issues/5395
def plot_labels(labels, names=(), save_dir=Path("")):
"""Plots dataset labels, saving correlogram and label images, handles classes, and visualizes bounding boxes."""
LOGGER.info(f"Plotting labels to {save_dir / 'labels.jpg'}... ")
c, b = labels[:, 0], labels[:, 1:].transpose() # classes, boxes
nc = int(c.max() + 1) # number of classes
x = pd.DataFrame(b.transpose(), columns=["x", "y", "width", "height"])
# seaborn correlogram
sn.pairplot(x, corner=True, diag_kind="auto", kind="hist", diag_kws=dict(bins=50), plot_kws=dict(pmax=0.9))
plt.savefig(save_dir / "labels_correlogram.jpg", dpi=200)
plt.close()
# matplotlib labels
matplotlib.use("svg") # faster
ax = plt.subplots(2, 2, figsize=(8, 8), tight_layout=True)[1].ravel()
y = ax[0].hist(c, bins=np.linspace(0, nc, nc + 1) - 0.5, rwidth=0.8)
with contextlib.suppress(Exception): # color histogram bars by class
[y[2].patches[i].set_color([x / 255 for x in colors(i)]) for i in range(nc)] # known issue #3195
ax[0].set_ylabel("instances")
if 0 < len(names) < 30:
ax[0].set_xticks(range(len(names)))
ax[0].set_xticklabels(list(names.values()), rotation=90, fontsize=10)
else:
ax[0].set_xlabel("classes")
sn.histplot(x, x="x", y="y", ax=ax[2], bins=50, pmax=0.9)
sn.histplot(x, x="width", y="height", ax=ax[3], bins=50, pmax=0.9)
# rectangles
labels[:, 1:3] = 0.5 # center
labels[:, 1:] = xywh2xyxy(labels[:, 1:]) * 2000
img = Image.fromarray(np.ones((2000, 2000, 3), dtype=np.uint8) * 255)
for cls, *box in labels[:1000]:
ImageDraw.Draw(img).rectangle(box, width=1, outline=colors(cls)) # plot
ax[1].imshow(img)
ax[1].axis("off")
for a in [0, 1, 2, 3]:
for s in ["top", "right", "left", "bottom"]:
ax[a].spines[s].set_visible(False)
plt.savefig(save_dir / "labels.jpg", dpi=200)
matplotlib.use("Agg")
plt.close()
def imshow_cls(im, labels=None, pred=None, names=None, nmax=25, verbose=False, f=Path("images.jpg")):
"""Displays a grid of images with optional labels and predictions, saving to a file."""
from utils.augmentations import denormalize
names = names or [f"class{i}" for i in range(1000)]
blocks = torch.chunk(
denormalize(im.clone()).cpu().float(), len(im), dim=0
) # select batch index 0, block by channels
n = min(len(blocks), nmax) # number of plots
m = min(8, round(n**0.5)) # 8 x 8 default
fig, ax = plt.subplots(math.ceil(n / m), m) # 8 rows x n/8 cols
ax = ax.ravel() if m > 1 else [ax]
# plt.subplots_adjust(wspace=0.05, hspace=0.05)
for i in range(n):
ax[i].imshow(blocks[i].squeeze().permute((1, 2, 0)).numpy().clip(0.0, 1.0))
ax[i].axis("off")
if labels is not None:
s = names[labels[i]] + (f"—{names[pred[i]]}" if pred is not None else "")
ax[i].set_title(s, fontsize=8, verticalalignment="top")
plt.savefig(f, dpi=300, bbox_inches="tight")
plt.close()
if verbose:
LOGGER.info(f"Saving {f}")
if labels is not None:
LOGGER.info("True: " + " ".join(f"{names[i]:3s}" for i in labels[:nmax]))
if pred is not None:
LOGGER.info("Predicted:" + " ".join(f"{names[i]:3s}" for i in pred[:nmax]))
return f
def plot_evolve(evolve_csv="path/to/evolve.csv"):
"""
Plots hyperparameter evolution results from a given CSV, saving the plot and displaying best results.
Example: from utils.plots import *; plot_evolve()
"""
evolve_csv = Path(evolve_csv)
data = pd.read_csv(evolve_csv)
keys = [x.strip() for x in data.columns]
x = data.values
f = fitness(x)
j = np.argmax(f) # max fitness index
plt.figure(figsize=(10, 12), tight_layout=True)
matplotlib.rc("font", **{"size": 8})
print(f"Best results from row {j} of {evolve_csv}:")
for i, k in enumerate(keys[7:]):
v = x[:, 7 + i]
mu = v[j] # best single result
plt.subplot(6, 5, i + 1)
plt.scatter(v, f, c=hist2d(v, f, 20), cmap="viridis", alpha=0.8, edgecolors="none")
plt.plot(mu, f.max(), "k+", markersize=15)
plt.title(f"{k} = {mu:.3g}", fontdict={"size": 9}) # limit to 40 characters
if i % 5 != 0:
plt.yticks([])
print(f"{k:>15}: {mu:.3g}")
f = evolve_csv.with_suffix(".png") # filename
plt.savefig(f, dpi=200)
plt.close()
print(f"Saved {f}")
def plot_results(file="path/to/results.csv", dir=""):
"""
Plots training results from a 'results.csv' file; accepts file path and directory as arguments.
Example: from utils.plots import *; plot_results('path/to/results.csv')
"""
save_dir = Path(file).parent if file else Path(dir)
fig, ax = plt.subplots(2, 5, figsize=(12, 6), tight_layout=True)
ax = ax.ravel()
files = list(save_dir.glob("results*.csv"))
assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
for f in files:
try:
data = pd.read_csv(f)
s = [x.strip() for x in data.columns]
x = data.values[:, 0]
for i, j in enumerate([1, 2, 3, 4, 5, 8, 9, 10, 6, 7]):
y = data.values[:, j].astype("float")
# y[y == 0] = np.nan # don't show zero values
ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=8) # actual results
ax[i].plot(x, gaussian_filter1d(y, sigma=3), ":", label="smooth", linewidth=2) # smoothing line
ax[i].set_title(s[j], fontsize=12)
# if j in [8, 9, 10]: # share train and val loss y axes
# ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
except Exception as e:
LOGGER.info(f"Warning: Plotting error for {f}: {e}")
ax[1].legend()
fig.savefig(save_dir / "results.png", dpi=200)
plt.close()
def profile_idetection(start=0, stop=0, labels=(), save_dir=""):
"""
Plots per-image iDetection logs, comparing metrics like storage and performance over time.
Example: from utils.plots import *; profile_idetection()
"""
ax = plt.subplots(2, 4, figsize=(12, 6), tight_layout=True)[1].ravel()
s = ["Images", "Free Storage (GB)", "RAM Usage (GB)", "Battery", "dt_raw (ms)", "dt_smooth (ms)", "real-world FPS"]
files = list(Path(save_dir).glob("frames*.txt"))
for fi, f in enumerate(files):
try:
results = np.loadtxt(f, ndmin=2).T[:, 90:-30] # clip first and last rows
n = results.shape[1] # number of rows
x = np.arange(start, min(stop, n) if stop else n)
results = results[:, x]
t = results[0] - results[0].min() # set t0=0s
results[0] = x
for i, a in enumerate(ax):
if i < len(results):
label = labels[fi] if len(labels) else f.stem.replace("frames_", "")
a.plot(t, results[i], marker=".", label=label, linewidth=1, markersize=5)
a.set_title(s[i])
a.set_xlabel("time (s)")
# if fi == len(files) - 1:
# a.set_ylim(bottom=0)
for side in ["top", "right"]:
a.spines[side].set_visible(False)
else:
a.remove()
except Exception as e:
print(f"Warning: Plotting error for {f}; {e}")
ax[1].legend()
plt.savefig(Path(save_dir) / "idetection_profile.png", dpi=200)
def save_one_box(xyxy, im, file=Path("im.jpg"), gain=1.02, pad=10, square=False, BGR=False, save=True):
"""Crops and saves an image from bounding box `xyxy`, applied with `gain` and `pad`, optionally squares and adjusts
for BGR.
"""
xyxy = torch.tensor(xyxy).view(-1, 4)
b = xyxy2xywh(xyxy) # boxes
if square:
b[:, 2:] = b[:, 2:].max(1)[0].unsqueeze(1) # attempt rectangle to square
b[:, 2:] = b[:, 2:] * gain + pad # box wh * gain + pad
xyxy = xywh2xyxy(b).long()
clip_boxes(xyxy, im.shape)
crop = im[int(xyxy[0, 1]) : int(xyxy[0, 3]), int(xyxy[0, 0]) : int(xyxy[0, 2]), :: (1 if BGR else -1)]
if save:
file.parent.mkdir(parents=True, exist_ok=True) # make directory
f = str(increment_path(file).with_suffix(".jpg"))
# cv2.imwrite(f, crop) # save BGR, https://github.com/ultralytics/yolov5/issues/7007 chroma subsampling issue
Image.fromarray(crop[..., ::-1]).save(f, quality=95, subsampling=0) # save RGB
return crop
================================================
FILE: utils/segment/__init__.py
================================================
================================================
FILE: utils/segment/augmentations.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Image augmentation functions."""
import math
import random
import cv2
import numpy as np
from ..augmentations import box_candidates
from ..general import resample_segments, segment2box
def mixup(im, labels, segments, im2, labels2, segments2):
"""
Applies MixUp augmentation blending two images, labels, and segments with a random ratio.
See https://arxiv.org/pdf/1710.09412.pdf
"""
r = np.random.beta(32.0, 32.0) # mixup ratio, alpha=beta=32.0
im = (im * r + im2 * (1 - r)).astype(np.uint8)
labels = np.concatenate((labels, labels2), 0)
segments = np.concatenate((segments, segments2), 0)
return im, labels, segments
def random_perspective(
im, targets=(), segments=(), degrees=10, translate=0.1, scale=0.1, shear=10, perspective=0.0, border=(0, 0)
):
# torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(.1, .1), scale=(.9, 1.1), shear=(-10, 10))
# targets = [cls, xyxy]
height = im.shape[0] + border[0] * 2 # shape(h,w,c)
width = im.shape[1] + border[1] * 2
# Center
C = np.eye(3)
C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
# Perspective
P = np.eye(3)
P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
# Rotation and Scale
R = np.eye(3)
a = random.uniform(-degrees, degrees)
# a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
s = random.uniform(1 - scale, 1 + scale)
# s = 2 ** random.uniform(-scale, scale)
R[:2] = cv2.getRotationMatrix2D(angle=a, center=(0, 0), scale=s)
# Shear
S = np.eye(3)
S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
# Translation
T = np.eye(3)
T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
# Combined rotation matrix
M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
if perspective:
im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
else: # affine
im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
# Visualize
# import matplotlib.pyplot as plt
# ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
# ax[0].imshow(im[:, :, ::-1]) # base
# ax[1].imshow(im2[:, :, ::-1]) # warped
# Transform label coordinates
n = len(targets)
new_segments = []
if n:
new = np.zeros((n, 4))
segments = resample_segments(segments) # upsample
for i, segment in enumerate(segments):
xy = np.ones((len(segment), 3))
xy[:, :2] = segment
xy = xy @ M.T # transform
xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
# clip
new[i] = segment2box(xy, width, height)
new_segments.append(xy)
# filter candidates
i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01)
targets = targets[i]
targets[:, 1:5] = new[i]
new_segments = np.array(new_segments)[i]
return im, targets, new_segments
================================================
FILE: utils/segment/dataloaders.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Dataloaders."""
import os
import random
import cv2
import numpy as np
import torch
from torch.utils.data import DataLoader, distributed
from ..augmentations import augment_hsv, copy_paste, letterbox
from ..dataloaders import InfiniteDataLoader, LoadImagesAndLabels, SmartDistributedSampler, seed_worker
from ..general import LOGGER, xyn2xy, xywhn2xyxy, xyxy2xywhn
from ..torch_utils import torch_distributed_zero_first
from .augmentations import mixup, random_perspective
RANK = int(os.getenv("RANK", -1))
def create_dataloader(
path,
imgsz,
batch_size,
stride,
single_cls=False,
hyp=None,
augment=False,
cache=False,
pad=0.0,
rect=False,
rank=-1,
workers=8,
image_weights=False,
quad=False,
prefix="",
shuffle=False,
mask_downsample_ratio=1,
overlap_mask=False,
seed=0,
):
if rect and shuffle:
LOGGER.warning("WARNING ⚠️ --rect is incompatible with DataLoader shuffle, setting shuffle=False")
shuffle = False
with torch_distributed_zero_first(rank): # init dataset *.cache only once if DDP
dataset = LoadImagesAndLabelsAndMasks(
path,
imgsz,
batch_size,
augment=augment, # augmentation
hyp=hyp, # hyperparameters
rect=rect, # rectangular batches
cache_images=cache,
single_cls=single_cls,
stride=int(stride),
pad=pad,
image_weights=image_weights,
prefix=prefix,
downsample_ratio=mask_downsample_ratio,
overlap=overlap_mask,
rank=rank,
)
batch_size = min(batch_size, len(dataset))
nd = torch.cuda.device_count() # number of CUDA devices
nw = min([os.cpu_count() // max(nd, 1), batch_size if batch_size > 1 else 0, workers]) # number of workers
sampler = None if rank == -1 else SmartDistributedSampler(dataset, shuffle=shuffle)
loader = DataLoader if image_weights else InfiniteDataLoader # only DataLoader allows for attribute updates
generator = torch.Generator()
generator.manual_seed(6148914691236517205 + seed + RANK)
return loader(
dataset,
batch_size=batch_size,
shuffle=shuffle and sampler is None,
num_workers=nw,
sampler=sampler,
pin_memory=True,
collate_fn=LoadImagesAndLabelsAndMasks.collate_fn4 if quad else LoadImagesAndLabelsAndMasks.collate_fn,
worker_init_fn=seed_worker,
generator=generator,
), dataset
class LoadImagesAndLabelsAndMasks(LoadImagesAndLabels): # for training/testing
def __init__(
self,
path,
img_size=640,
batch_size=16,
augment=False,
hyp=None,
rect=False,
image_weights=False,
cache_images=False,
single_cls=False,
stride=32,
pad=0,
min_items=0,
prefix="",
downsample_ratio=1,
overlap=False,
rank=-1,
seed=0,
):
super().__init__(
path,
img_size,
batch_size,
augment,
hyp,
rect,
image_weights,
cache_images,
single_cls,
stride,
pad,
min_items,
prefix,
rank,
seed,
)
self.downsample_ratio = downsample_ratio
self.overlap = overlap
def __getitem__(self, index):
"""Returns a transformed item from the dataset at the specified index, handling indexing and image weighting."""
index = self.indices[index] # linear, shuffled, or image_weights
hyp = self.hyp
mosaic = self.mosaic and random.random() < hyp["mosaic"]
masks = []
if mosaic:
# Load mosaic
img, labels, segments = self.load_mosaic(index)
shapes = None
# MixUp augmentation
if random.random() < hyp["mixup"]:
img, labels, segments = mixup(img, labels, segments, *self.load_mosaic(random.randint(0, self.n - 1)))
else:
# Load image
img, (h0, w0), (h, w) = self.load_image(index)
# Letterbox
shape = self.batch_shapes[self.batch[index]] if self.rect else self.img_size # final letterboxed shape
img, ratio, pad = letterbox(img, shape, auto=False, scaleup=self.augment)
shapes = (h0, w0), ((h / h0, w / w0), pad) # for COCO mAP rescaling
labels = self.labels[index].copy()
# [array, array, ....], array.shape=(num_points, 2), xyxyxyxy
segments = self.segments[index].copy()
if len(segments):
for i_s in range(len(segments)):
segments[i_s] = xyn2xy(
segments[i_s],
ratio[0] * w,
ratio[1] * h,
padw=pad[0],
padh=pad[1],
)
if labels.size: # normalized xywh to pixel xyxy format
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], ratio[0] * w, ratio[1] * h, padw=pad[0], padh=pad[1])
if self.augment:
img, labels, segments = random_perspective(
img,
labels,
segments=segments,
degrees=hyp["degrees"],
translate=hyp["translate"],
scale=hyp["scale"],
shear=hyp["shear"],
perspective=hyp["perspective"],
)
nl = len(labels) # number of labels
if nl:
labels[:, 1:5] = xyxy2xywhn(labels[:, 1:5], w=img.shape[1], h=img.shape[0], clip=True, eps=1e-3)
if self.overlap:
masks, sorted_idx = polygons2masks_overlap(
img.shape[:2], segments, downsample_ratio=self.downsample_ratio
)
masks = masks[None] # (640, 640) -> (1, 640, 640)
labels = labels[sorted_idx]
else:
masks = polygons2masks(img.shape[:2], segments, color=1, downsample_ratio=self.downsample_ratio)
masks = (
torch.from_numpy(masks)
if len(masks)
else torch.zeros(
1 if self.overlap else nl, img.shape[0] // self.downsample_ratio, img.shape[1] // self.downsample_ratio
)
)
# TODO: albumentations support
if self.augment:
# Albumentations
# there are some augmentation that won't change boxes and masks,
# so just be it for now.
img, labels = self.albumentations(img, labels)
nl = len(labels) # update after albumentations
# HSV color-space
augment_hsv(img, hgain=hyp["hsv_h"], sgain=hyp["hsv_s"], vgain=hyp["hsv_v"])
# Flip up-down
if random.random() < hyp["flipud"]:
img = np.flipud(img)
if nl:
labels[:, 2] = 1 - labels[:, 2]
masks = torch.flip(masks, dims=[1])
# Flip left-right
if random.random() < hyp["fliplr"]:
img = np.fliplr(img)
if nl:
labels[:, 1] = 1 - labels[:, 1]
masks = torch.flip(masks, dims=[2])
# Cutouts # labels = cutout(img, labels, p=0.5)
labels_out = torch.zeros((nl, 6))
if nl:
labels_out[:, 1:] = torch.from_numpy(labels)
# Convert
img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
img = np.ascontiguousarray(img)
return (torch.from_numpy(img), labels_out, self.im_files[index], shapes, masks)
def load_mosaic(self, index):
"""Loads 1 image + 3 random images into a 4-image YOLOv5 mosaic, adjusting labels and segments accordingly."""
labels4, segments4 = [], []
s = self.img_size
yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
# 3 additional image indices
indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
for i, index in enumerate(indices):
# Load image
img, _, (h, w) = self.load_image(index)
# place img in img4
if i == 0: # top left
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
elif i == 1: # top right
x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
elif i == 2: # bottom left
x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
elif i == 3: # bottom right
x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
padw = x1a - x1b
padh = y1a - y1b
labels, segments = self.labels[index].copy(), self.segments[index].copy()
if labels.size:
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
labels4.append(labels)
segments4.extend(segments)
# Concat/clip labels
labels4 = np.concatenate(labels4, 0)
for x in (labels4[:, 1:], *segments4):
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
# img4, labels4 = replicate(img4, labels4) # replicate
# Augment
img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp["copy_paste"])
img4, labels4, segments4 = random_perspective(
img4,
labels4,
segments4,
degrees=self.hyp["degrees"],
translate=self.hyp["translate"],
scale=self.hyp["scale"],
shear=self.hyp["shear"],
perspective=self.hyp["perspective"],
border=self.mosaic_border,
) # border to remove
return img4, labels4, segments4
@staticmethod
def collate_fn(batch):
"""Custom collation function for DataLoader, batches images, labels, paths, shapes, and segmentation masks."""
img, label, path, shapes, masks = zip(*batch) # transposed
batched_masks = torch.cat(masks, 0)
for i, l in enumerate(label):
l[:, 0] = i # add target image index for build_targets()
return torch.stack(img, 0), torch.cat(label, 0), path, shapes, batched_masks
def polygon2mask(img_size, polygons, color=1, downsample_ratio=1):
"""
Args:
img_size (tuple): The image size.
polygons (np.ndarray): [N, M], N is the number of polygons,
M is the number of points(Be divided by 2).
"""
mask = np.zeros(img_size, dtype=np.uint8)
polygons = np.asarray(polygons)
polygons = polygons.astype(np.int32)
shape = polygons.shape
polygons = polygons.reshape(shape[0], -1, 2)
cv2.fillPoly(mask, polygons, color=color)
nh, nw = (img_size[0] // downsample_ratio, img_size[1] // downsample_ratio)
# NOTE: fillPoly firstly then resize is trying the keep the same way
# of loss calculation when mask-ratio=1.
mask = cv2.resize(mask, (nw, nh))
return mask
def polygons2masks(img_size, polygons, color, downsample_ratio=1):
"""
Args:
img_size (tuple): The image size.
polygons (list[np.ndarray]): each polygon is [N, M],
N is the number of polygons,
M is the number of points(Be divided by 2).
"""
masks = []
for si in range(len(polygons)):
mask = polygon2mask(img_size, [polygons[si].reshape(-1)], color, downsample_ratio)
masks.append(mask)
return np.array(masks)
def polygons2masks_overlap(img_size, segments, downsample_ratio=1):
"""Return a (640, 640) overlap mask."""
masks = np.zeros(
(img_size[0] // downsample_ratio, img_size[1] // downsample_ratio),
dtype=np.int32 if len(segments) > 255 else np.uint8,
)
areas = []
ms = []
for si in range(len(segments)):
mask = polygon2mask(
img_size,
[segments[si].reshape(-1)],
downsample_ratio=downsample_ratio,
color=1,
)
ms.append(mask)
areas.append(mask.sum())
areas = np.asarray(areas)
index = np.argsort(-areas)
ms = np.array(ms)[index]
for i in range(len(segments)):
mask = ms[i] * (i + 1)
masks = masks + mask
masks = np.clip(masks, a_min=0, a_max=i + 1)
return masks, index
================================================
FILE: utils/segment/general.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import cv2
import numpy as np
import torch
import torch.nn.functional as F
def crop_mask(masks, boxes):
"""
"Crop" predicted masks by zeroing out everything not in the predicted bbox. Vectorized by Chong (thanks Chong).
Args:
- masks should be a size [n, h, w] tensor of masks
- boxes should be a size [n, 4] tensor of bbox coords in relative point form
"""
n, h, w = masks.shape
x1, y1, x2, y2 = torch.chunk(boxes[:, :, None], 4, 1) # x1 shape(1,1,n)
r = torch.arange(w, device=masks.device, dtype=x1.dtype)[None, None, :] # rows shape(1,w,1)
c = torch.arange(h, device=masks.device, dtype=x1.dtype)[None, :, None] # cols shape(h,1,1)
return masks * ((r >= x1) * (r < x2) * (c >= y1) * (c < y2))
def process_mask_upsample(protos, masks_in, bboxes, shape):
"""
Crop after upsample.
protos: [mask_dim, mask_h, mask_w]
masks_in: [n, mask_dim], n is number of masks after nms
bboxes: [n, 4], n is number of masks after nms
shape: input_image_size, (h, w)
return: h, w, n
"""
c, mh, mw = protos.shape # CHW
masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
masks = F.interpolate(masks[None], shape, mode="bilinear", align_corners=False)[0] # CHW
masks = crop_mask(masks, bboxes) # CHW
return masks.gt_(0.5)
def process_mask(protos, masks_in, bboxes, shape, upsample=False):
"""
Crop before upsample.
proto_out: [mask_dim, mask_h, mask_w]
out_masks: [n, mask_dim], n is number of masks after nms
bboxes: [n, 4], n is number of masks after nms
shape:input_image_size, (h, w)
return: h, w, n
"""
c, mh, mw = protos.shape # CHW
ih, iw = shape
masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw) # CHW
downsampled_bboxes = bboxes.clone()
downsampled_bboxes[:, 0] *= mw / iw
downsampled_bboxes[:, 2] *= mw / iw
downsampled_bboxes[:, 3] *= mh / ih
downsampled_bboxes[:, 1] *= mh / ih
masks = crop_mask(masks, downsampled_bboxes) # CHW
if upsample:
masks = F.interpolate(masks[None], shape, mode="bilinear", align_corners=False)[0] # CHW
return masks.gt_(0.5)
def process_mask_native(protos, masks_in, bboxes, shape):
"""
Crop after upsample.
protos: [mask_dim, mask_h, mask_w]
masks_in: [n, mask_dim], n is number of masks after nms
bboxes: [n, 4], n is number of masks after nms
shape: input_image_size, (h, w)
return: h, w, n
"""
c, mh, mw = protos.shape # CHW
masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)
gain = min(mh / shape[0], mw / shape[1]) # gain = old / new
pad = (mw - shape[1] * gain) / 2, (mh - shape[0] * gain) / 2 # wh padding
top, left = int(pad[1]), int(pad[0]) # y, x
bottom, right = int(mh - pad[1]), int(mw - pad[0])
masks = masks[:, top:bottom, left:right]
masks = F.interpolate(masks[None], shape, mode="bilinear", align_corners=False)[0] # CHW
masks = crop_mask(masks, bboxes) # CHW
return masks.gt_(0.5)
def scale_image(im1_shape, masks, im0_shape, ratio_pad=None):
"""
img1_shape: model input shape, [h, w]
img0_shape: origin pic shape, [h, w, 3]
masks: [h, w, num]
"""
# Rescale coordinates (xyxy) from im1_shape to im0_shape
if ratio_pad is None: # calculate from im0_shape
gain = min(im1_shape[0] / im0_shape[0], im1_shape[1] / im0_shape[1]) # gain = old / new
pad = (im1_shape[1] - im0_shape[1] * gain) / 2, (im1_shape[0] - im0_shape[0] * gain) / 2 # wh padding
else:
pad = ratio_pad[1]
top, left = int(pad[1]), int(pad[0]) # y, x
bottom, right = int(im1_shape[0] - pad[1]), int(im1_shape[1] - pad[0])
if len(masks.shape) < 2:
raise ValueError(f'"len of masks shape" should be 2 or 3, but got {len(masks.shape)}')
masks = masks[top:bottom, left:right]
# masks = masks.permute(2, 0, 1).contiguous()
# masks = F.interpolate(masks[None], im0_shape[:2], mode='bilinear', align_corners=False)[0]
# masks = masks.permute(1, 2, 0).contiguous()
masks = cv2.resize(masks, (im0_shape[1], im0_shape[0]))
if len(masks.shape) == 2:
masks = masks[:, :, None]
return masks
def mask_iou(mask1, mask2, eps=1e-7):
"""
mask1: [N, n] m1 means number of predicted objects
mask2: [M, n] m2 means number of gt objects
Note: n means image_w x image_h
return: masks iou, [N, M]
"""
intersection = torch.matmul(mask1, mask2.t()).clamp(0)
union = (mask1.sum(1)[:, None] + mask2.sum(1)[None]) - intersection # (area1 + area2) - intersection
return intersection / (union + eps)
def masks_iou(mask1, mask2, eps=1e-7):
"""
mask1: [N, n] m1 means number of predicted objects
mask2: [N, n] m2 means number of gt objects
Note: n means image_w x image_h
return: masks iou, (N, )
"""
intersection = (mask1 * mask2).sum(1).clamp(0) # (N, )
union = (mask1.sum(1) + mask2.sum(1))[None] - intersection # (area1 + area2) - intersection
return intersection / (union + eps)
def masks2segments(masks, strategy="largest"):
"""Converts binary (n,160,160) masks to polygon segments with options for concatenation or selecting the largest
segment.
"""
segments = []
for x in masks.int().cpu().numpy().astype("uint8"):
c = cv2.findContours(x, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0]
if c:
if strategy == "concat": # concatenate all segments
c = np.concatenate([x.reshape(-1, 2) for x in c])
elif strategy == "largest": # select largest segment
c = np.array(c[np.array([len(x) for x in c]).argmax()]).reshape(-1, 2)
else:
c = np.zeros((0, 2)) # no segments found
segments.append(c.astype("float32"))
return segments
================================================
FILE: utils/segment/loss.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import torch
import torch.nn as nn
import torch.nn.functional as F
from ..general import xywh2xyxy
from ..loss import FocalLoss, smooth_BCE
from ..metrics import bbox_iou
from ..torch_utils import de_parallel
from .general import crop_mask
class ComputeLoss:
# Compute losses
def __init__(self, model, autobalance=False, overlap=False):
"""Initializes the compute loss function for YOLOv5 models with options for autobalancing and overlap
handling.
"""
self.sort_obj_iou = False
self.overlap = overlap
device = next(model.parameters()).device # get model device
h = model.hyp # hyperparameters
# Define criteria
BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["cls_pw"]], device=device))
BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h["obj_pw"]], device=device))
# Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
self.cp, self.cn = smooth_BCE(eps=h.get("label_smoothing", 0.0)) # positive, negative BCE targets
# Focal loss
g = h["fl_gamma"] # focal loss gamma
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
m = de_parallel(model).model[-1] # Detect() module
self.balance = {3: [4.0, 1.0, 0.4]}.get(m.nl, [4.0, 1.0, 0.25, 0.06, 0.02]) # P3-P7
self.ssi = list(m.stride).index(16) if autobalance else 0 # stride 16 index
self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
self.na = m.na # number of anchors
self.nc = m.nc # number of classes
self.nl = m.nl # number of layers
self.nm = m.nm # number of masks
self.anchors = m.anchors
self.device = device
def __call__(self, preds, targets, masks): # predictions, targets, model
"""Evaluates YOLOv5 model's loss for given predictions, targets, and masks; returns total loss components."""
p, proto = preds
bs, nm, mask_h, mask_w = proto.shape # batch size, number of masks, mask height, mask width
lcls = torch.zeros(1, device=self.device)
lbox = torch.zeros(1, device=self.device)
lobj = torch.zeros(1, device=self.device)
lseg = torch.zeros(1, device=self.device)
tcls, tbox, indices, anchors, tidxs, xywhn = self.build_targets(p, targets) # targets
# Losses
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros(pi.shape[:4], dtype=pi.dtype, device=self.device) # target obj
n = b.shape[0] # number of targets
if n:
pxy, pwh, _, pcls, pmask = pi[b, a, gj, gi].split((2, 2, 1, self.nc, nm), 1) # subset of predictions
# Box regression
pxy = pxy.sigmoid() * 2 - 0.5
pwh = (pwh.sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
iou = bbox_iou(pbox, tbox[i], CIoU=True).squeeze() # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
# Objectness
iou = iou.detach().clamp(0).type(tobj.dtype)
if self.sort_obj_iou:
j = iou.argsort()
b, a, gj, gi, iou = b[j], a[j], gj[j], gi[j], iou[j]
if self.gr < 1:
iou = (1.0 - self.gr) + self.gr * iou
tobj[b, a, gj, gi] = iou # iou ratio
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
t = torch.full_like(pcls, self.cn, device=self.device) # targets
t[range(n), tcls[i]] = self.cp
lcls += self.BCEcls(pcls, t) # BCE
# Mask regression
if tuple(masks.shape[-2:]) != (mask_h, mask_w): # downsample
masks = F.interpolate(masks[None], (mask_h, mask_w), mode="nearest")[0]
marea = xywhn[i][:, 2:].prod(1) # mask width, height normalized
mxyxy = xywh2xyxy(xywhn[i] * torch.tensor([mask_w, mask_h, mask_w, mask_h], device=self.device))
for bi in b.unique():
j = b == bi # matching index
if self.overlap:
mask_gti = torch.where(masks[bi][None] == tidxs[i][j].view(-1, 1, 1), 1.0, 0.0)
else:
mask_gti = masks[tidxs[i]][j]
lseg += self.single_mask_loss(mask_gti, pmask[j], proto[bi], mxyxy[j], marea[j])
obji = self.BCEobj(pi[..., 4], tobj)
lobj += obji * self.balance[i] # obj loss
if self.autobalance:
self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
if self.autobalance:
self.balance = [x / self.balance[self.ssi] for x in self.balance]
lbox *= self.hyp["box"]
lobj *= self.hyp["obj"]
lcls *= self.hyp["cls"]
lseg *= self.hyp["box"] / bs
loss = lbox + lobj + lcls + lseg
return loss * bs, torch.cat((lbox, lseg, lobj, lcls)).detach()
def single_mask_loss(self, gt_mask, pred, proto, xyxy, area):
"""Calculates and normalizes single mask loss for YOLOv5 between predicted and ground truth masks."""
pred_mask = (pred @ proto.view(self.nm, -1)).view(-1, *proto.shape[1:]) # (n,32) @ (32,80,80) -> (n,80,80)
loss = F.binary_cross_entropy_with_logits(pred_mask, gt_mask, reduction="none")
return (crop_mask(loss, xyxy).mean(dim=(1, 2)) / area).mean()
def build_targets(self, p, targets):
"""Prepares YOLOv5 targets for loss computation; inputs targets (image, class, x, y, w, h), output target
classes/boxes.
"""
na, nt = self.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch, tidxs, xywhn = [], [], [], [], [], []
gain = torch.ones(8, device=self.device) # normalized to gridspace gain
ai = torch.arange(na, device=self.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
if self.overlap:
batch = p[0].shape[0]
ti = []
for i in range(batch):
num = (targets[:, 0] == i).sum() # find number of targets of each image
ti.append(torch.arange(num, device=self.device).float().view(1, num).repeat(na, 1) + 1) # (na, num)
ti = torch.cat(ti, 1) # (na, nt)
else:
ti = torch.arange(nt, device=self.device).float().view(1, nt).repeat(na, 1)
targets = torch.cat((targets.repeat(na, 1, 1), ai[..., None], ti[..., None]), 2) # append anchor indices
g = 0.5 # bias
off = (
torch.tensor(
[
[0, 0],
[1, 0],
[0, 1],
[-1, 0],
[0, -1], # j,k,l,m
# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
],
device=self.device,
).float()
* g
) # offsets
for i in range(self.nl):
anchors, shape = self.anchors[i], p[i].shape
gain[2:6] = torch.tensor(shape)[[3, 2, 3, 2]] # xyxy gain
# Match targets to anchors
t = targets * gain # shape(3,n,7)
if nt:
# Matches
r = t[..., 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1 / r).max(2)[0] < self.hyp["anchor_t"] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filter
# Offsets
gxy = t[:, 2:4] # grid xy
gxi = gain[[2, 3]] - gxy # inverse
j, k = ((gxy % 1 < g) & (gxy > 1)).T
l, m = ((gxi % 1 < g) & (gxi > 1)).T
j = torch.stack((torch.ones_like(j), j, k, l, m))
t = t.repeat((5, 1, 1))[j]
offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
else:
t = targets[0]
offsets = 0
# Define
bc, gxy, gwh, at = t.chunk(4, 1) # (image, class), grid xy, grid wh, anchors
(a, tidx), (b, c) = at.long().T, bc.long().T # anchors, image, class
gij = (gxy - offsets).long()
gi, gj = gij.T # grid indices
# Append
indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1))) # image, anchor, grid
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
anch.append(anchors[a]) # anchors
tcls.append(c) # class
tidxs.append(tidx)
xywhn.append(torch.cat((gxy, gwh), 1) / gain[2:6]) # xywh normalized
return tcls, tbox, indices, anch, tidxs, xywhn
================================================
FILE: utils/segment/metrics.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Model validation metrics."""
import numpy as np
from ..metrics import ap_per_class
def fitness(x):
"""Evaluates model fitness by a weighted sum of 8 metrics, `x`: [N,8] array, weights: [0.1, 0.9] for mAP and F1."""
w = [0.0, 0.0, 0.1, 0.9, 0.0, 0.0, 0.1, 0.9]
return (x[:, :8] * w).sum(1)
def ap_per_class_box_and_mask(
tp_m,
tp_b,
conf,
pred_cls,
target_cls,
plot=False,
save_dir=".",
names=(),
):
"""
Args:
tp_b: tp of boxes.
tp_m: tp of masks.
other arguments see `func: ap_per_class`.
"""
results_boxes = ap_per_class(
tp_b, conf, pred_cls, target_cls, plot=plot, save_dir=save_dir, names=names, prefix="Box"
)[2:]
results_masks = ap_per_class(
tp_m, conf, pred_cls, target_cls, plot=plot, save_dir=save_dir, names=names, prefix="Mask"
)[2:]
return {
"boxes": {
"p": results_boxes[0],
"r": results_boxes[1],
"ap": results_boxes[3],
"f1": results_boxes[2],
"ap_class": results_boxes[4],
},
"masks": {
"p": results_masks[0],
"r": results_masks[1],
"ap": results_masks[3],
"f1": results_masks[2],
"ap_class": results_masks[4],
},
}
class Metric:
def __init__(self) -> None:
self.p = [] # (nc, )
self.r = [] # (nc, )
self.f1 = [] # (nc, )
self.all_ap = [] # (nc, 10)
self.ap_class_index = [] # (nc, )
@property
def ap50(self):
"""
AP@0.5 of all classes.
Return:
(nc, ) or [].
"""
return self.all_ap[:, 0] if len(self.all_ap) else []
@property
def ap(self):
"""AP@0.5:0.95
Return:
(nc, ) or [].
"""
return self.all_ap.mean(1) if len(self.all_ap) else []
@property
def mp(self):
"""
Mean precision of all classes.
Return:
float.
"""
return self.p.mean() if len(self.p) else 0.0
@property
def mr(self):
"""
Mean recall of all classes.
Return:
float.
"""
return self.r.mean() if len(self.r) else 0.0
@property
def map50(self):
"""
Mean AP@0.5 of all classes.
Return:
float.
"""
return self.all_ap[:, 0].mean() if len(self.all_ap) else 0.0
@property
def map(self):
"""
Mean AP@0.5:0.95 of all classes.
Return:
float.
"""
return self.all_ap.mean() if len(self.all_ap) else 0.0
def mean_results(self):
"""Mean of results, return mp, mr, map50, map."""
return (self.mp, self.mr, self.map50, self.map)
def class_result(self, i):
"""Class-aware result, return p[i], r[i], ap50[i], ap[i]"""
return (self.p[i], self.r[i], self.ap50[i], self.ap[i])
def get_maps(self, nc):
"""Calculates and returns mean Average Precision (mAP) for each class given number of classes `nc`."""
maps = np.zeros(nc) + self.map
for i, c in enumerate(self.ap_class_index):
maps[c] = self.ap[i]
return maps
def update(self, results):
"""
Args:
results: tuple(p, r, ap, f1, ap_class)
"""
p, r, all_ap, f1, ap_class_index = results
self.p = p
self.r = r
self.all_ap = all_ap
self.f1 = f1
self.ap_class_index = ap_class_index
class Metrics:
"""Metric for boxes and masks."""
def __init__(self) -> None:
self.metric_box = Metric()
self.metric_mask = Metric()
def update(self, results):
"""
Args:
results: Dict{'boxes': Dict{}, 'masks': Dict{}}
"""
self.metric_box.update(list(results["boxes"].values()))
self.metric_mask.update(list(results["masks"].values()))
def mean_results(self):
"""Computes and returns the mean results for both box and mask metrics by summing their individual means."""
return self.metric_box.mean_results() + self.metric_mask.mean_results()
def class_result(self, i):
"""Returns the sum of box and mask metric results for a specified class index `i`."""
return self.metric_box.class_result(i) + self.metric_mask.class_result(i)
def get_maps(self, nc):
"""Calculates and returns the sum of mean average precisions (mAPs) for both box and mask metrics for `nc`
classes.
"""
return self.metric_box.get_maps(nc) + self.metric_mask.get_maps(nc)
@property
def ap_class_index(self):
"""Returns the class index for average precision, shared by both box and mask metrics."""
return self.metric_box.ap_class_index
KEYS = [
"train/box_loss",
"train/seg_loss", # train loss
"train/obj_loss",
"train/cls_loss",
"metrics/precision(B)",
"metrics/recall(B)",
"metrics/mAP_0.5(B)",
"metrics/mAP_0.5:0.95(B)", # metrics
"metrics/precision(M)",
"metrics/recall(M)",
"metrics/mAP_0.5(M)",
"metrics/mAP_0.5:0.95(M)", # metrics
"val/box_loss",
"val/seg_loss", # val loss
"val/obj_loss",
"val/cls_loss",
"x/lr0",
"x/lr1",
"x/lr2",
]
BEST_KEYS = [
"best/epoch",
"best/precision(B)",
"best/recall(B)",
"best/mAP_0.5(B)",
"best/mAP_0.5:0.95(B)",
"best/precision(M)",
"best/recall(M)",
"best/mAP_0.5(M)",
"best/mAP_0.5:0.95(M)",
]
================================================
FILE: utils/segment/plots.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
import contextlib
import math
from pathlib import Path
import cv2
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import torch
from .. import threaded
from ..general import xywh2xyxy
from ..plots import Annotator, colors
@threaded
def plot_images_and_masks(images, targets, masks, paths=None, fname="images.jpg", names=None):
"""Plots a grid of images, their labels, and masks with optional resizing and annotations, saving to fname."""
if isinstance(images, torch.Tensor):
images = images.cpu().float().numpy()
if isinstance(targets, torch.Tensor):
targets = targets.cpu().numpy()
if isinstance(masks, torch.Tensor):
masks = masks.cpu().numpy().astype(int)
max_size = 1920 # max image size
max_subplots = 16 # max image subplots, i.e. 4x4
bs, _, h, w = images.shape # batch size, _, height, width
bs = min(bs, max_subplots) # limit plot images
ns = np.ceil(bs**0.5) # number of subplots (square)
if np.max(images[0]) <= 1:
images *= 255 # de-normalise (optional)
# Build Image
mosaic = np.full((int(ns * h), int(ns * w), 3), 255, dtype=np.uint8) # init
for i, im in enumerate(images):
if i == max_subplots: # if last batch has fewer images than we expect
break
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
im = im.transpose(1, 2, 0)
mosaic[y : y + h, x : x + w, :] = im
# Resize (optional)
scale = max_size / ns / max(h, w)
if scale < 1:
h = math.ceil(scale * h)
w = math.ceil(scale * w)
mosaic = cv2.resize(mosaic, tuple(int(x * ns) for x in (w, h)))
# Annotate
fs = int((h + w) * ns * 0.01) # font size
annotator = Annotator(mosaic, line_width=round(fs / 10), font_size=fs, pil=True, example=names)
for i in range(i + 1):
x, y = int(w * (i // ns)), int(h * (i % ns)) # block origin
annotator.rectangle([x, y, x + w, y + h], None, (255, 255, 255), width=2) # borders
if paths:
annotator.text([x + 5, y + 5], text=Path(paths[i]).name[:40], txt_color=(220, 220, 220)) # filenames
if len(targets) > 0:
idx = targets[:, 0] == i
ti = targets[idx] # image targets
boxes = xywh2xyxy(ti[:, 2:6]).T
classes = ti[:, 1].astype("int")
labels = ti.shape[1] == 6 # labels if no conf column
conf = None if labels else ti[:, 6] # check for confidence presence (label vs pred)
if boxes.shape[1]:
if boxes.max() <= 1.01: # if normalized with tolerance 0.01
boxes[[0, 2]] *= w # scale to pixels
boxes[[1, 3]] *= h
elif scale < 1: # absolute coords need scale if image scales
boxes *= scale
boxes[[0, 2]] += x
boxes[[1, 3]] += y
for j, box in enumerate(boxes.T.tolist()):
cls = classes[j]
color = colors(cls)
cls = names[cls] if names else cls
if labels or conf[j] > 0.25: # 0.25 conf thresh
label = f"{cls}" if labels else f"{cls} {conf[j]:.1f}"
annotator.box_label(box, label, color=color)
# Plot masks
if len(masks):
if masks.max() > 1.0: # mean that masks are overlap
image_masks = masks[[i]] # (1, 640, 640)
nl = len(ti)
index = np.arange(nl).reshape(nl, 1, 1) + 1
image_masks = np.repeat(image_masks, nl, axis=0)
image_masks = np.where(image_masks == index, 1.0, 0.0)
else:
image_masks = masks[idx]
im = np.asarray(annotator.im).copy()
for j, box in enumerate(boxes.T.tolist()):
if labels or conf[j] > 0.25: # 0.25 conf thresh
color = colors(classes[j])
mh, mw = image_masks[j].shape
if mh != h or mw != w:
mask = image_masks[j].astype(np.uint8)
mask = cv2.resize(mask, (w, h))
mask = mask.astype(bool)
else:
mask = image_masks[j].astype(bool)
with contextlib.suppress(Exception):
im[y : y + h, x : x + w, :][mask] = (
im[y : y + h, x : x + w, :][mask] * 0.4 + np.array(color) * 0.6
)
annotator.fromarray(im)
annotator.im.save(fname) # save
def plot_results_with_masks(file="path/to/results.csv", dir="", best=True):
"""
Plots training results from CSV files, plotting best or last result highlights based on `best` parameter.
Example: from utils.plots import *; plot_results('path/to/results.csv')
"""
save_dir = Path(file).parent if file else Path(dir)
fig, ax = plt.subplots(2, 8, figsize=(18, 6), tight_layout=True)
ax = ax.ravel()
files = list(save_dir.glob("results*.csv"))
assert len(files), f"No results.csv files found in {save_dir.resolve()}, nothing to plot."
for f in files:
try:
data = pd.read_csv(f)
index = np.argmax(
0.9 * data.values[:, 8] + 0.1 * data.values[:, 7] + 0.9 * data.values[:, 12] + 0.1 * data.values[:, 11]
)
s = [x.strip() for x in data.columns]
x = data.values[:, 0]
for i, j in enumerate([1, 2, 3, 4, 5, 6, 9, 10, 13, 14, 15, 16, 7, 8, 11, 12]):
y = data.values[:, j]
# y[y == 0] = np.nan # don't show zero values
ax[i].plot(x, y, marker=".", label=f.stem, linewidth=2, markersize=2)
if best:
# best
ax[i].scatter(index, y[index], color="r", label=f"best:{index}", marker="*", linewidth=3)
ax[i].set_title(s[j] + f"\n{round(y[index], 5)}")
else:
# last
ax[i].scatter(x[-1], y[-1], color="r", label="last", marker="*", linewidth=3)
ax[i].set_title(s[j] + f"\n{round(y[-1], 5)}")
# if j in [8, 9, 10]: # share train and val loss y axes
# ax[i].get_shared_y_axes().join(ax[i], ax[i - 5])
except Exception as e:
print(f"Warning: Plotting error for {f}: {e}")
ax[1].legend()
fig.savefig(save_dir / "results.png", dpi=200)
plt.close()
================================================
FILE: utils/torch_utils.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""PyTorch utils."""
import math
import os
import platform
import subprocess
import time
import warnings
from contextlib import contextmanager
from copy import deepcopy
from pathlib import Path
import torch
import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
from torch.nn.parallel import DistributedDataParallel as DDP
from utils.general import LOGGER, check_version, colorstr, file_date, git_describe
LOCAL_RANK = int(os.getenv("LOCAL_RANK", -1)) # https://pytorch.org/docs/stable/elastic/run.html
RANK = int(os.getenv("RANK", -1))
WORLD_SIZE = int(os.getenv("WORLD_SIZE", 1))
try:
import thop # for FLOPs computation
except ImportError:
thop = None
# Suppress PyTorch warnings
warnings.filterwarnings("ignore", message="User provided device_type of 'cuda', but CUDA is not available. Disabling")
warnings.filterwarnings("ignore", category=UserWarning)
def smart_inference_mode(torch_1_9=check_version(torch.__version__, "1.9.0")):
"""Applies torch.inference_mode() if torch>=1.9.0, else torch.no_grad() as a decorator for functions."""
def decorate(fn):
return (torch.inference_mode if torch_1_9 else torch.no_grad)()(fn)
return decorate
def smartCrossEntropyLoss(label_smoothing=0.0):
"""Returns a CrossEntropyLoss with optional label smoothing for torch>=1.10.0; warns if smoothing on lower
versions.
"""
if check_version(torch.__version__, "1.10.0"):
return nn.CrossEntropyLoss(label_smoothing=label_smoothing)
if label_smoothing > 0:
LOGGER.warning(f"WARNING ⚠️ label smoothing {label_smoothing} requires torch>=1.10.0")
return nn.CrossEntropyLoss()
def smart_DDP(model):
"""Initializes DistributedDataParallel (DDP) for model training, respecting torch version constraints."""
assert not check_version(torch.__version__, "1.12.0", pinned=True), (
"torch==1.12.0 torchvision==0.13.0 DDP training is not supported due to a known issue. "
"Please upgrade or downgrade torch to use DDP. See https://github.com/ultralytics/yolov5/issues/8395"
)
if check_version(torch.__version__, "1.11.0"):
return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK, static_graph=True)
else:
return DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
def reshape_classifier_output(model, n=1000):
"""Reshapes last layer of model to match class count 'n', supporting Classify, Linear, Sequential types."""
from models.common import Classify
name, m = list((model.model if hasattr(model, "model") else model).named_children())[-1] # last module
if isinstance(m, Classify): # YOLOv5 Classify() head
if m.linear.out_features != n:
m.linear = nn.Linear(m.linear.in_features, n)
elif isinstance(m, nn.Linear): # ResNet, EfficientNet
if m.out_features != n:
setattr(model, name, nn.Linear(m.in_features, n))
elif isinstance(m, nn.Sequential):
types = [type(x) for x in m]
if nn.Linear in types:
i = len(types) - 1 - types[::-1].index(nn.Linear) # last nn.Linear index
if m[i].out_features != n:
m[i] = nn.Linear(m[i].in_features, n)
elif nn.Conv2d in types:
i = len(types) - 1 - types[::-1].index(nn.Conv2d) # last nn.Conv2d index
if m[i].out_channels != n:
m[i] = nn.Conv2d(m[i].in_channels, n, m[i].kernel_size, m[i].stride, bias=m[i].bias is not None)
@contextmanager
def torch_distributed_zero_first(local_rank: int):
"""Context manager ensuring ordered operations in distributed training by making all processes wait for the leading
process.
"""
if local_rank not in [-1, 0]:
dist.barrier(device_ids=[local_rank])
yield
if local_rank == 0:
dist.barrier(device_ids=[0])
def device_count():
"""Returns the number of available CUDA devices; works on Linux and Windows by invoking `nvidia-smi`."""
assert platform.system() in ("Linux", "Windows"), "device_count() only supported on Linux or Windows"
try:
cmd = "nvidia-smi -L | wc -l" if platform.system() == "Linux" else 'nvidia-smi -L | find /c /v ""' # Windows
return int(subprocess.run(cmd, shell=True, capture_output=True, check=True).stdout.decode().split()[-1])
except Exception:
return 0
def select_device(device="", batch_size=0, newline=True):
"""Selects computing device (CPU, CUDA GPU, MPS) for YOLOv5 model deployment, logging device info."""
s = f"YOLOv5 🚀 {git_describe() or file_date()} Python-{platform.python_version()} torch-{torch.__version__} "
device = str(device).strip().lower().replace("cuda:", "").replace("none", "") # to string, 'cuda:0' to '0'
dml = device == "dml"
cpu = device == "cpu"
mps = device == "mps" # Apple Metal Performance Shaders (MPS)
if cpu or mps or dml:
os.environ["CUDA_VISIBLE_DEVICES"] = "-1" # force torch.cuda.is_available() = False
elif device: # non-cpu device requested
os.environ["CUDA_VISIBLE_DEVICES"] = device # set environment variable - must be before assert is_available()
assert torch.cuda.is_available() and torch.cuda.device_count() >= len(
device.replace(",", "")
), f"Invalid CUDA '--device {device}' requested, use '--device cpu' or pass valid CUDA device(s)"
if not dml and not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
devices = device.split(",") if device else "0" # range(torch.cuda.device_count()) # i.e. 0,1,6,7
n = len(devices) # device count
if n > 1 and batch_size > 0: # check batch_size is divisible by device_count
assert batch_size % n == 0, f"batch-size {batch_size} not multiple of GPU count {n}"
space = " " * (len(s) + 1)
for i, d in enumerate(devices):
p = torch.cuda.get_device_properties(i)
s += f"{'' if i == 0 else space}CUDA:{d} ({p.name}, {p.total_memory / (1 << 20):.0f}MiB)\n" # bytes to MB
arg = "cuda:0"
elif mps and getattr(torch, "has_mps", False) and torch.backends.mps.is_available(): # prefer MPS if available
s += "MPS\n"
arg = "mps"
elif dml:
import torch_directml
if torch_directml.is_available():
devices = torch_directml.device(0) # 启用0号dml设备,在这可以更换使用的设备
n = 0
s += r"dml:" + str(torch_directml.device_name(0))
arg = torch_directml.device(0)
else:
s += "CPU\n"
arg = "cpu"
else: # revert to CPU
s += "CPU\n"
arg = "cpu"
if not newline:
s = s.rstrip()
LOGGER.info(s)
return torch.device(arg)
def time_sync():
"""Synchronizes PyTorch for accurate timing, leveraging CUDA if available, and returns the current time."""
if torch.cuda.is_available():
torch.cuda.synchronize()
return time.time()
def profile(input, ops, n=10, device=None):
"""YOLOv5 speed/memory/FLOPs profiler
Usage:
input = torch.randn(16, 3, 640, 640)
m1 = lambda x: x * torch.sigmoid(x)
m2 = nn.SiLU()
profile(input, [m1, m2], n=100) # profile over 100 iterations
"""
results = []
if not isinstance(device, torch.device):
device = select_device(device)
print(
f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
f"{'input':>24s}{'output':>24s}"
)
for x in input if isinstance(input, list) else [input]:
x = x.to(device)
x.requires_grad = True
for m in ops if isinstance(ops, list) else [ops]:
m = m.to(device) if hasattr(m, "to") else m # device
m = m.half() if hasattr(m, "half") and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
try:
flops = thop.profile(m, inputs=(x,), verbose=False)[0] / 1e9 * 2 # GFLOPs
except Exception:
flops = 0
try:
for _ in range(n):
t[0] = time_sync()
y = m(x)
t[1] = time_sync()
try:
_ = (sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
t[2] = time_sync()
except Exception: # no backward method
# print(e) # for debug
t[2] = float("nan")
tf += (t[1] - t[0]) * 1000 / n # ms per op forward
tb += (t[2] - t[1]) * 1000 / n # ms per op backward
mem = torch.cuda.memory_reserved() / 1e9 if torch.cuda.is_available() else 0 # (GB)
s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else "list" for x in (x, y)) # shapes
p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
print(f"{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}")
results.append([p, flops, mem, tf, tb, s_in, s_out])
except Exception as e:
print(e)
results.append(None)
torch.cuda.empty_cache()
return results
def is_parallel(model):
"""Checks if the model is using Data Parallelism (DP) or Distributed Data Parallelism (DDP)."""
return type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
def de_parallel(model):
"""Returns a single-GPU model by removing Data Parallelism (DP) or Distributed Data Parallelism (DDP) if applied."""
return model.module if is_parallel(model) else model
def initialize_weights(model):
"""Initializes weights of Conv2d, BatchNorm2d, and activations (Hardswish, LeakyReLU, ReLU, ReLU6, SiLU) in the
model.
"""
for m in model.modules():
t = type(m)
if t is nn.Conv2d:
pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif t is nn.BatchNorm2d:
m.eps = 1e-3
m.momentum = 0.03
elif t in [nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU]:
m.inplace = True
def find_modules(model, mclass=nn.Conv2d):
"""Finds and returns list of layer indices in `model.module_list` matching the specified `mclass`."""
return [i for i, m in enumerate(model.module_list) if isinstance(m, mclass)]
def sparsity(model):
"""Calculates and returns the global sparsity of a model as the ratio of zero-valued parameters to total
parameters.
"""
a, b = 0, 0
for p in model.parameters():
a += p.numel()
b += (p == 0).sum()
return b / a
def prune(model, amount=0.3):
"""Prunes Conv2d layers in a model to a specified sparsity using L1 unstructured pruning."""
import torch.nn.utils.prune as prune
for name, m in model.named_modules():
if isinstance(m, nn.Conv2d):
prune.l1_unstructured(m, name="weight", amount=amount) # prune
prune.remove(m, "weight") # make permanent
LOGGER.info(f"Model pruned to {sparsity(model):.3g} global sparsity")
def fuse_conv_and_bn(conv, bn):
"""
Fuses Conv2d and BatchNorm2d layers into a single Conv2d layer.
See https://tehnokv.com/posts/fusing-batchnorm-and-conv/.
"""
fusedconv = (
nn.Conv2d(
conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
dilation=conv.dilation,
groups=conv.groups,
bias=True,
)
.requires_grad_(False)
.to(conv.weight.device)
)
# Prepare filters
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
# Prepare spatial bias
b_conv = torch.zeros(conv.weight.size(0), device=conv.weight.device) if conv.bias is None else conv.bias
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
return fusedconv
def model_info(model, verbose=False, imgsz=640):
"""
Prints model summary including layers, parameters, gradients, and FLOPs; imgsz may be int or list.
Example: img_size=640 or img_size=[640, 320]
"""
n_p = sum(x.numel() for x in model.parameters()) # number parameters
n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
if verbose:
print(f"{'layer':>5} {'name':>40} {'gradient':>9} {'parameters':>12} {'shape':>20} {'mu':>10} {'sigma':>10}")
for i, (name, p) in enumerate(model.named_parameters()):
name = name.replace("module_list.", "")
print(
"%5g %40s %9s %12g %20s %10.3g %10.3g"
% (i, name, p.requires_grad, p.numel(), list(p.shape), p.mean(), p.std())
)
try: # FLOPs
p = next(model.parameters())
stride = max(int(model.stride.max()), 32) if hasattr(model, "stride") else 32 # max stride
im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
flops = thop.profile(deepcopy(model), inputs=(im,), verbose=False)[0] / 1e9 * 2 # stride GFLOPs
imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
fs = f", {flops * imgsz[0] / stride * imgsz[1] / stride:.1f} GFLOPs" # 640x640 GFLOPs
except Exception:
fs = ""
name = Path(model.yaml_file).stem.replace("yolov5", "YOLOv5") if hasattr(model, "yaml_file") else "Model"
LOGGER.info(f"{name} summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
def scale_img(img, ratio=1.0, same_shape=False, gs=32): # img(16,3,256,416)
"""Scales an image tensor `img` of shape (bs,3,y,x) by `ratio`, optionally maintaining the original shape, padded to
multiples of `gs`.
"""
if ratio == 1.0:
return img
h, w = img.shape[2:]
s = (int(h * ratio), int(w * ratio)) # new size
img = F.interpolate(img, size=s, mode="bilinear", align_corners=False) # resize
if not same_shape: # pad/crop img
h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
def copy_attr(a, b, include=(), exclude=()):
"""Copies attributes from object b to a, optionally filtering with include and exclude lists."""
for k, v in b.__dict__.items():
if (len(include) and k not in include) or k.startswith("_") or k in exclude:
continue
else:
setattr(a, k, v)
def smart_optimizer(model, name="Adam", lr=0.001, momentum=0.9, decay=1e-5):
"""
Initializes YOLOv5 smart optimizer with 3 parameter groups for different decay configurations.
Groups are 0) weights with decay, 1) weights no decay, 2) biases no decay.
"""
g = [], [], [] # optimizer parameter groups
bn = tuple(v for k, v in nn.__dict__.items() if "Norm" in k) # normalization layers, i.e. BatchNorm2d()
for v in model.modules():
for p_name, p in v.named_parameters(recurse=0):
if p_name == "bias": # bias (no decay)
g[2].append(p)
elif p_name == "weight" and isinstance(v, bn): # weight (no decay)
g[1].append(p)
else:
g[0].append(p) # weight (with decay)
if name == "Adam":
optimizer = torch.optim.Adam(g[2], lr=lr, betas=(momentum, 0.999)) # adjust beta1 to momentum
elif name == "AdamW":
optimizer = torch.optim.AdamW(g[2], lr=lr, betas=(momentum, 0.999), weight_decay=0.0)
elif name == "RMSProp":
optimizer = torch.optim.RMSprop(g[2], lr=lr, momentum=momentum)
elif name == "SGD":
optimizer = torch.optim.SGD(g[2], lr=lr, momentum=momentum, nesterov=True)
else:
raise NotImplementedError(f"Optimizer {name} not implemented.")
optimizer.add_param_group({"params": g[0], "weight_decay": decay}) # add g0 with weight_decay
optimizer.add_param_group({"params": g[1], "weight_decay": 0.0}) # add g1 (BatchNorm2d weights)
LOGGER.info(
f"{colorstr('optimizer:')} {type(optimizer).__name__}(lr={lr}) with parameter groups "
f'{len(g[1])} weight(decay=0.0), {len(g[0])} weight(decay={decay}), {len(g[2])} bias'
)
return optimizer
def smart_hub_load(repo="ultralytics/yolov5", model="yolov5s", **kwargs):
"""YOLOv5 torch.hub.load() wrapper with smart error handling, adjusting torch arguments for compatibility."""
if check_version(torch.__version__, "1.9.1"):
kwargs["skip_validation"] = True # validation causes GitHub API rate limit errors
if check_version(torch.__version__, "1.12.0"):
kwargs["trust_repo"] = True # argument required starting in torch 0.12
try:
return torch.hub.load(repo, model, **kwargs)
except Exception:
return torch.hub.load(repo, model, force_reload=True, **kwargs)
def smart_resume(ckpt, optimizer, ema=None, weights="yolov5s.pt", epochs=300, resume=True):
"""Resumes training from a checkpoint, updating optimizer, ema, and epochs, with optional resume verification."""
best_fitness = 0.0
start_epoch = ckpt["epoch"] + 1
if ckpt["optimizer"] is not None:
optimizer.load_state_dict(ckpt["optimizer"]) # optimizer
best_fitness = ckpt["best_fitness"]
if ema and ckpt.get("ema"):
ema.ema.load_state_dict(ckpt["ema"].float().state_dict()) # EMA
ema.updates = ckpt["updates"]
if resume:
assert start_epoch > 0, (
f"{weights} training to {epochs} epochs is finished, nothing to resume.\n"
f"Start a new training without --resume, i.e. 'python train.py --weights {weights}'"
)
LOGGER.info(f"Resuming training from {weights} from epoch {start_epoch} to {epochs} total epochs")
if epochs < start_epoch:
LOGGER.info(f"{weights} has been trained for {ckpt['epoch']} epochs. Fine-tuning for {epochs} more epochs.")
epochs += ckpt["epoch"] # finetune additional epochs
return best_fitness, start_epoch, epochs
class EarlyStopping:
# YOLOv5 simple early stopper
def __init__(self, patience=30):
"""Initializes simple early stopping mechanism for YOLOv5, with adjustable patience for non-improving epochs."""
self.best_fitness = 0.0 # i.e. mAP
self.best_epoch = 0
self.patience = patience or float("inf") # epochs to wait after fitness stops improving to stop
self.possible_stop = False # possible stop may occur next epoch
def __call__(self, epoch, fitness):
"""Evaluates if training should stop based on fitness improvement and patience, returning a boolean."""
if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
self.best_epoch = epoch
self.best_fitness = fitness
delta = epoch - self.best_epoch # epochs without improvement
self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
stop = delta >= self.patience # stop training if patience exceeded
if stop:
LOGGER.info(
f"Stopping training early as no improvement observed in last {self.patience} epochs. "
f"Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n"
f"To update EarlyStopping(patience={self.patience}) pass a new patience value, "
f"i.e. `python train.py --patience 300` or use `--patience 0` to disable EarlyStopping."
)
return stop
class ModelEMA:
"""Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models
Keeps a moving average of everything in the model state_dict (parameters and buffers)
For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
"""
def __init__(self, model, decay=0.9999, tau=2000, updates=0):
"""Initializes EMA with model parameters, decay rate, tau for decay adjustment, and update count; sets model to
evaluation mode.
"""
self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
self.updates = updates # number of EMA updates
self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
for p in self.ema.parameters():
p.requires_grad_(False)
def update(self, model):
"""Updates the Exponential Moving Average (EMA) parameters based on the current model's parameters."""
self.updates += 1
d = self.decay(self.updates)
msd = de_parallel(model).state_dict() # model state_dict
for k, v in self.ema.state_dict().items():
if v.dtype.is_floating_point: # true for FP16 and FP32
v *= d
v += (1 - d) * msd[k].detach()
# assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype} and model {msd[k].dtype} must be FP32'
def update_attr(self, model, include=(), exclude=("process_group", "reducer")):
"""Updates EMA attributes by copying specified attributes from model to EMA, excluding certain attributes by
default.
"""
copy_attr(self.ema, model, include, exclude)
================================================
FILE: utils/triton.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""Utils to interact with the Triton Inference Server."""
import typing
from urllib.parse import urlparse
import torch
class TritonRemoteModel:
"""
A wrapper over a model served by the Triton Inference Server.
It can be configured to communicate over GRPC or HTTP. It accepts Torch Tensors as input and returns them as
outputs.
"""
def __init__(self, url: str):
"""
Keyword arguments:
url: Fully qualified address of the Triton server - for e.g. grpc://localhost:8000
"""
parsed_url = urlparse(url)
if parsed_url.scheme == "grpc":
from tritonclient.grpc import InferenceServerClient, InferInput
self.client = InferenceServerClient(parsed_url.netloc) # Triton GRPC client
model_repository = self.client.get_model_repository_index()
self.model_name = model_repository.models[0].name
self.metadata = self.client.get_model_metadata(self.model_name, as_json=True)
def create_input_placeholders() -> typing.List[InferInput]:
return [
InferInput(i["name"], [int(s) for s in i["shape"]], i["datatype"]) for i in self.metadata["inputs"]
]
else:
from tritonclient.http import InferenceServerClient, InferInput
self.client = InferenceServerClient(parsed_url.netloc) # Triton HTTP client
model_repository = self.client.get_model_repository_index()
self.model_name = model_repository[0]["name"]
self.metadata = self.client.get_model_metadata(self.model_name)
def create_input_placeholders() -> typing.List[InferInput]:
return [
InferInput(i["name"], [int(s) for s in i["shape"]], i["datatype"]) for i in self.metadata["inputs"]
]
self._create_input_placeholders_fn = create_input_placeholders
@property
def runtime(self):
"""Returns the model runtime."""
return self.metadata.get("backend", self.metadata.get("platform"))
def __call__(self, *args, **kwargs) -> typing.Union[torch.Tensor, typing.Tuple[torch.Tensor, ...]]:
"""
Invokes the model.
Parameters can be provided via args or kwargs. args, if provided, are assumed to match the order of inputs of
the model. kwargs are matched with the model input names.
"""
inputs = self._create_inputs(*args, **kwargs)
response = self.client.infer(model_name=self.model_name, inputs=inputs)
result = []
for output in self.metadata["outputs"]:
tensor = torch.as_tensor(response.as_numpy(output["name"]))
result.append(tensor)
return result[0] if len(result) == 1 else result
def _create_inputs(self, *args, **kwargs):
"""Creates input tensors from args or kwargs, not both; raises error if none or both are provided."""
args_len, kwargs_len = len(args), len(kwargs)
if not args_len and not kwargs_len:
raise RuntimeError("No inputs provided.")
if args_len and kwargs_len:
raise RuntimeError("Cannot specify args and kwargs at the same time")
placeholders = self._create_input_placeholders_fn()
if args_len:
if args_len != len(placeholders):
raise RuntimeError(f"Expected {len(placeholders)} inputs, got {args_len}.")
for input, value in zip(placeholders, args):
input.set_data_from_numpy(value.cpu().numpy())
else:
for input in placeholders:
value = kwargs[input.name]
input.set_data_from_numpy(value.cpu().numpy())
return placeholders
================================================
FILE: val.py
================================================
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""
Validate a trained YOLOv5 detection model on a detection dataset.
Usage:
$ python val.py --weights yolov5s.pt --data coco128.yaml --img 640
Usage - formats:
$ python val.py --weights yolov5s.pt # PyTorch
yolov5s.torchscript # TorchScript
yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
yolov5s_openvino_model # OpenVINO
yolov5s.engine # TensorRT
yolov5s.mlmodel # CoreML (macOS-only)
yolov5s_saved_model # TensorFlow SavedModel
yolov5s.pb # TensorFlow GraphDef
yolov5s.tflite # TensorFlow Lite
yolov5s_edgetpu.tflite # TensorFlow Edge TPU
yolov5s_paddle_model # PaddlePaddle
"""
import argparse
import json
import os
import subprocess
import sys
from pathlib import Path
import numpy as np
import torch
from tqdm import tqdm
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
from models.common import DetectMultiBackend
from utils.callbacks import Callbacks
from utils.dataloaders import create_dataloader
from utils.general import (
LOGGER,
TQDM_BAR_FORMAT,
Profile,
check_dataset,
check_img_size,
check_requirements,
check_yaml,
coco80_to_coco91_class,
colorstr,
increment_path,
non_max_suppression,
print_args,
scale_boxes,
xywh2xyxy,
xyxy2xywh,
)
from utils.metrics import ConfusionMatrix, ap_per_class, box_iou
from utils.plots import output_to_target, plot_images, plot_val_study
from utils.torch_utils import select_device, smart_inference_mode
def save_one_txt(predn, save_conf, shape, file):
"""Saves one detection result to a txt file in normalized xywh format, optionally including confidence."""
gn = torch.tensor(shape)[[1, 0, 1, 0]] # normalization gain whwh
for *xyxy, conf, cls in predn.tolist():
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format
with open(file, "a") as f:
f.write(("%g " * len(line)).rstrip() % line + "\n")
def save_one_json(predn, jdict, path, class_map):
"""
Saves one JSON detection result with image ID, category ID, bounding box, and score.
Example: {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236}
"""
image_id = int(path.stem) if path.stem.isnumeric() else path.stem
box = xyxy2xywh(predn[:, :4]) # xywh
box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner
for p, b in zip(predn.tolist(), box.tolist()):
jdict.append(
{
"image_id": image_id,
"category_id": class_map[int(p[5])],
"bbox": [round(x, 3) for x in b],
"score": round(p[4], 5),
}
)
def process_batch(detections, labels, iouv):
"""
Return correct prediction matrix.
Arguments:
detections (array[N, 6]), x1, y1, x2, y2, conf, class
labels (array[M, 5]), class, x1, y1, x2, y2
Returns:
correct (array[N, 10]), for 10 IoU levels
"""
correct = np.zeros((detections.shape[0], iouv.shape[0])).astype(bool)
iou = box_iou(labels[:, 1:], detections[:, :4])
correct_class = labels[:, 0:1] == detections[:, 5]
for i in range(len(iouv)):
x = torch.where((iou >= iouv[i]) & correct_class) # IoU > threshold and classes match
if x[0].shape[0]:
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), 1).cpu().numpy() # [label, detect, iou]
if x[0].shape[0] > 1:
matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 1], return_index=True)[1]]
# matches = matches[matches[:, 2].argsort()[::-1]]
matches = matches[np.unique(matches[:, 0], return_index=True)[1]]
correct[matches[:, 1].astype(int), i] = True
return torch.tensor(correct, dtype=torch.bool, device=iouv.device)
@smart_inference_mode()
def run(
data,
weights=None, # model.pt path(s)
batch_size=32, # batch size
imgsz=640, # inference size (pixels)
conf_thres=0.001, # confidence threshold
iou_thres=0.6, # NMS IoU threshold
max_det=300, # maximum detections per image
task="val", # train, val, test, speed or study
device="", # cuda device, i.e. 0 or 0,1,2,3 or cpu
workers=8, # max dataloader workers (per RANK in DDP mode)
single_cls=False, # treat as single-class dataset
augment=False, # augmented inference
verbose=False, # verbose output
save_txt=False, # save results to *.txt
save_hybrid=False, # save label+prediction hybrid results to *.txt
save_conf=False, # save confidences in --save-txt labels
save_json=False, # save a COCO-JSON results file
project=ROOT / "runs/val", # save to project/name
name="exp", # save to project/name
exist_ok=False, # existing project/name ok, do not increment
half=True, # use FP16 half-precision inference
dnn=False, # use OpenCV DNN for ONNX inference
model=None,
dataloader=None,
save_dir=Path(""),
plots=True,
callbacks=Callbacks(),
compute_loss=None,
):
# Initialize/load model and set device
training = model is not None
if training: # called by train.py
device, pt, jit, engine = next(model.parameters()).device, True, False, False # get model device, PyTorch model
half &= device.type != "cpu" # half precision only supported on CUDA
model.half() if half else model.float()
else: # called directly
device = select_device(device, batch_size=batch_size)
# Directories
save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
(save_dir / "labels" if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Load model
model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
stride, pt, jit, engine = model.stride, model.pt, model.jit, model.engine
imgsz = check_img_size(imgsz, s=stride) # check image size
half = model.fp16 # FP16 supported on limited backends with CUDA
if engine:
batch_size = model.batch_size
else:
device = model.device
if not (pt or jit):
batch_size = 1 # export.py models default to batch-size 1
LOGGER.info(f"Forcing --batch-size 1 square inference (1,3,{imgsz},{imgsz}) for non-PyTorch models")
# Data
data = check_dataset(data) # check
# Configure
model.eval()
cuda = device.type != "cpu"
is_coco = isinstance(data.get("val"), str) and data["val"].endswith(f"coco{os.sep}val2017.txt") # COCO dataset
nc = 1 if single_cls else int(data["nc"]) # number of classes
iouv = torch.linspace(0.5, 0.95, 10, device=device) # iou vector for mAP@0.5:0.95
niou = iouv.numel()
# Dataloader
if not training:
if pt and not single_cls: # check --weights are trained on --data
ncm = model.model.nc
assert ncm == nc, (
f"{weights} ({ncm} classes) trained on different --data than what you passed ({nc} "
f"classes). Pass correct combination of --weights and --data that are trained together."
)
model.warmup(imgsz=(1 if pt else batch_size, 3, imgsz, imgsz)) # warmup
pad, rect = (0.0, False) if task == "speed" else (0.5, pt) # square inference for benchmarks
task = task if task in ("train", "val", "test") else "val" # path to train/val/test images
dataloader = create_dataloader(
data[task],
imgsz,
batch_size,
stride,
single_cls,
pad=pad,
rect=rect,
workers=workers,
prefix=colorstr(f"{task}: "),
)[0]
seen = 0
confusion_matrix = ConfusionMatrix(nc=nc)
names = model.names if hasattr(model, "names") else model.module.names # get class names
if isinstance(names, (list, tuple)): # old format
names = dict(enumerate(names))
class_map = coco80_to_coco91_class() if is_coco else list(range(1000))
s = ("%22s" + "%11s" * 6) % ("Class", "Images", "Instances", "P", "R", "mAP50", "mAP50-95")
tp, fp, p, r, f1, mp, mr, map50, ap50, map = 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
dt = Profile(device=device), Profile(device=device), Profile(device=device) # profiling times
loss = torch.zeros(3, device=device)
jdict, stats, ap, ap_class = [], [], [], []
callbacks.run("on_val_start")
pbar = tqdm(dataloader, desc=s, bar_format=TQDM_BAR_FORMAT) # progress bar
for batch_i, (im, targets, paths, shapes) in enumerate(pbar):
callbacks.run("on_val_batch_start")
with dt[0]:
if cuda:
im = im.to(device, non_blocking=True)
targets = targets.to(device)
im = im.half() if half else im.float() # uint8 to fp16/32
im /= 255 # 0 - 255 to 0.0 - 1.0
nb, _, height, width = im.shape # batch size, channels, height, width
# Inference
with dt[1]:
preds, train_out = model(im) if compute_loss else (model(im, augment=augment), None)
# Loss
if compute_loss:
loss += compute_loss(train_out, targets)[1] # box, obj, cls
# NMS
targets[:, 2:] *= torch.tensor((width, height, width, height), device=device) # to pixels
lb = [targets[targets[:, 0] == i, 1:] for i in range(nb)] if save_hybrid else [] # for autolabelling
with dt[2]:
preds = non_max_suppression(
preds, conf_thres, iou_thres, labels=lb, multi_label=True, agnostic=single_cls, max_det=max_det
)
# Metrics
for si, pred in enumerate(preds):
labels = targets[targets[:, 0] == si, 1:]
nl, npr = labels.shape[0], pred.shape[0] # number of labels, predictions
path, shape = Path(paths[si]), shapes[si][0]
correct = torch.zeros(npr, niou, dtype=torch.bool, device=device) # init
seen += 1
if npr == 0:
if nl:
stats.append((correct, *torch.zeros((2, 0), device=device), labels[:, 0]))
if plots:
confusion_matrix.process_batch(detections=None, labels=labels[:, 0])
continue
# Predictions
if single_cls:
pred[:, 5] = 0
predn = pred.clone()
scale_boxes(im[si].shape[1:], predn[:, :4], shape, shapes[si][1]) # native-space pred
# Evaluate
if nl:
tbox = xywh2xyxy(labels[:, 1:5]) # target boxes
scale_boxes(im[si].shape[1:], tbox, shape, shapes[si][1]) # native-space labels
labelsn = torch.cat((labels[:, 0:1], tbox), 1) # native-space labels
correct = process_batch(predn, labelsn, iouv)
if plots:
confusion_matrix.process_batch(predn, labelsn)
stats.append((correct, pred[:, 4], pred[:, 5], labels[:, 0])) # (correct, conf, pcls, tcls)
# Save/log
if save_txt:
(save_dir / "labels").mkdir(parents=True, exist_ok=True)
save_one_txt(predn, save_conf, shape, file=save_dir / "labels" / f"{path.stem}.txt")
if save_json:
save_one_json(predn, jdict, path, class_map) # append to COCO-JSON dictionary
callbacks.run("on_val_image_end", pred, predn, path, names, im[si])
# Plot images
if plots and batch_i < 3:
plot_images(im, targets, paths, save_dir / f"val_batch{batch_i}_labels.jpg", names) # labels
plot_images(im, output_to_target(preds), paths, save_dir / f"val_batch{batch_i}_pred.jpg", names) # pred
callbacks.run("on_val_batch_end", batch_i, im, targets, paths, shapes, preds)
# Compute metrics
stats = [torch.cat(x, 0).cpu().numpy() for x in zip(*stats)] # to numpy
if len(stats) and stats[0].any():
tp, fp, p, r, f1, ap, ap_class = ap_per_class(*stats, plot=plots, save_dir=save_dir, names=names)
ap50, ap = ap[:, 0], ap.mean(1) # AP@0.5, AP@0.5:0.95
mp, mr, map50, map = p.mean(), r.mean(), ap50.mean(), ap.mean()
nt = np.bincount(stats[3].astype(int), minlength=nc) # number of targets per class
# Print results
pf = "%22s" + "%11i" * 2 + "%11.3g" * 4 # print format
LOGGER.info(pf % ("all", seen, nt.sum(), mp, mr, map50, map))
if nt.sum() == 0:
LOGGER.warning(f"WARNING ⚠️ no labels found in {task} set, can not compute metrics without labels")
# Print results per class
if (verbose or (nc < 50 and not training)) and nc > 1 and len(stats):
for i, c in enumerate(ap_class):
LOGGER.info(pf % (names[c], seen, nt[c], p[i], r[i], ap50[i], ap[i]))
# Print speeds
t = tuple(x.t / seen * 1e3 for x in dt) # speeds per image
if not training:
shape = (batch_size, 3, imgsz, imgsz)
LOGGER.info(f"Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {shape}" % t)
# Plots
if plots:
confusion_matrix.plot(save_dir=save_dir, names=list(names.values()))
callbacks.run("on_val_end", nt, tp, fp, p, r, f1, ap, ap50, ap_class, confusion_matrix)
# Save JSON
if save_json and len(jdict):
w = Path(weights[0] if isinstance(weights, list) else weights).stem if weights is not None else "" # weights
anno_json = str(Path("../datasets/coco/annotations/instances_val2017.json")) # annotations
if not os.path.exists(anno_json):
anno_json = os.path.join(data["path"], "annotations", "instances_val2017.json")
pred_json = str(save_dir / f"{w}_predictions.json") # predictions
LOGGER.info(f"\nEvaluating pycocotools mAP... saving {pred_json}...")
with open(pred_json, "w") as f:
json.dump(jdict, f)
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb
check_requirements("pycocotools>=2.0.6")
from pycocotools.coco import COCO
from pycocotools.cocoeval import COCOeval
anno = COCO(anno_json) # init annotations api
pred = anno.loadRes(pred_json) # init predictions api
eval = COCOeval(anno, pred, "bbox")
if is_coco:
eval.params.imgIds = [int(Path(x).stem) for x in dataloader.dataset.im_files] # image IDs to evaluate
eval.evaluate()
eval.accumulate()
eval.summarize()
map, map50 = eval.stats[:2] # update results (mAP@0.5:0.95, mAP@0.5)
except Exception as e:
LOGGER.info(f"pycocotools unable to run: {e}")
# Return results
model.float() # for training
if not training:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ""
LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
maps = np.zeros(nc) + map
for i, c in enumerate(ap_class):
maps[c] = ap[i]
return (mp, mr, map50, map, *(loss.cpu() / len(dataloader)).tolist()), maps, t
def parse_opt():
"""Parses command-line options for YOLOv5 model inference configuration."""
parser = argparse.ArgumentParser()
parser.add_argument("--data", type=str, default=ROOT / "data/coco128.yaml", help="dataset.yaml path")
parser.add_argument("--weights", nargs="+", type=str, default=ROOT / "yolov5s.pt", help="model path(s)")
parser.add_argument("--batch-size", type=int, default=32, help="batch size")
parser.add_argument("--imgsz", "--img", "--img-size", type=int, default=640, help="inference size (pixels)")
parser.add_argument("--conf-thres", type=float, default=0.001, help="confidence threshold")
parser.add_argument("--iou-thres", type=float, default=0.6, help="NMS IoU threshold")
parser.add_argument("--max-det", type=int, default=300, help="maximum detections per image")
parser.add_argument("--task", default="val", help="train, val, test, speed or study")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--workers", type=int, default=8, help="max dataloader workers (per RANK in DDP mode)")
parser.add_argument("--single-cls", action="store_true", help="treat as single-class dataset")
parser.add_argument("--augment", action="store_true", help="augmented inference")
parser.add_argument("--verbose", action="store_true", help="report mAP by class")
parser.add_argument("--save-txt", action="store_true", help="save results to *.txt")
parser.add_argument("--save-hybrid", action="store_true", help="save label+prediction hybrid results to *.txt")
parser.add_argument("--save-conf", action="store_true", help="save confidences in --save-txt labels")
parser.add_argument("--save-json", action="store_true", help="save a COCO-JSON results file")
parser.add_argument("--project", default=ROOT / "runs/val", help="save to project/name")
parser.add_argument("--name", default="exp", help="save to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--half", action="store_true", help="use FP16 half-precision inference")
parser.add_argument("--dnn", action="store_true", help="use OpenCV DNN for ONNX inference")
opt = parser.parse_args()
opt.data = check_yaml(opt.data) # check YAML
opt.save_json |= opt.data.endswith("coco.yaml")
opt.save_txt |= opt.save_hybrid
print_args(vars(opt))
return opt
def main(opt):
"""Executes YOLOv5 tasks like training, validation, testing, speed, and study benchmarks based on provided
options.
"""
check_requirements(ROOT / "requirements.txt", exclude=("tensorboard", "thop"))
if opt.task in ("train", "val", "test"): # run normally
if opt.conf_thres > 0.001: # https://github.com/ultralytics/yolov5/issues/1466
LOGGER.info(f"WARNING ⚠️ confidence threshold {opt.conf_thres} > 0.001 produces invalid results")
if opt.save_hybrid:
LOGGER.info("WARNING ⚠️ --save-hybrid will return high mAP from hybrid labels, not from predictions alone")
run(**vars(opt))
else:
weights = opt.weights if isinstance(opt.weights, list) else [opt.weights]
opt.half = torch.cuda.is_available() and opt.device != "cpu" # FP16 for fastest results
if opt.task == "speed": # speed benchmarks
# python val.py --task speed --data coco.yaml --batch 1 --weights yolov5n.pt yolov5s.pt...
opt.conf_thres, opt.iou_thres, opt.save_json = 0.25, 0.45, False
for opt.weights in weights:
run(**vars(opt), plots=False)
elif opt.task == "study": # speed vs mAP benchmarks
# python val.py --task study --data coco.yaml --iou 0.7 --weights yolov5n.pt yolov5s.pt...
for opt.weights in weights:
f = f"study_{Path(opt.data).stem}_{Path(opt.weights).stem}.txt" # filename to save to
x, y = list(range(256, 1536 + 128, 128)), [] # x axis (image sizes), y axis
for opt.imgsz in x: # img-size
LOGGER.info(f"\nRunning {f} --imgsz {opt.imgsz}...")
r, _, t = run(**vars(opt), plots=False)
y.append(r + t) # results and times
np.savetxt(f, y, fmt="%10.4g") # save
subprocess.run(["zip", "-r", "study.zip", "study_*.txt"])
plot_val_study(x=x) # plot
else:
raise NotImplementedError(f'--task {opt.task} not in ("train", "val", "test", "speed", "study")')
if __name__ == "__main__":
opt = parse_opt()
main(opt)
================================================
FILE: validate.spec
================================================
# -*- mode: python ; coding: utf-8 -*-
block_cipher = None
a = Analysis(
['web\\validate.py'],
pathex=[],
binaries=[],
datas=[],
hiddenimports=[],
hookspath=[],
hooksconfig={},
runtime_hooks=[],
excludes=[],
win_no_prefer_redirects=False,
win_private_assemblies=False,
cipher=block_cipher,
noarchive=False,
)
pyz = PYZ(a.pure, a.zipped_data, cipher=block_cipher)
exe = EXE(
pyz,
a.scripts,
[],
exclude_binaries=True,
name='validate',
debug=False,
bootloader_ignore_signals=False,
strip=False,
upx=True,
console=True,
disable_windowed_traceback=False,
argv_emulation=False,
target_arch=None,
codesign_identity=None,
entitlements_file=None,
)
coll = COLLECT(
exe,
a.binaries,
a.zipfiles,
a.datas,
strip=False,
upx=True,
upx_exclude=[],
name='validate',
)
================================================
FILE: 训练命令.txt
================================================
python train.py --weights .\apex_model\apex2.pt --data .\apex_model\1w2\1w.yaml --workers 8 --batch-size 16 --epochs 1000
python export.py --imgsz (320,320) --weights .\apex_model\1w2\best_20230918.pt --data .\apex_model\1w2\1w.yaml --include engine --device 0 --half
python detect.py --imgsz 640 --data .\apex_model\3k.yaml --weights .\apex_model\3k.pt --source .\data\images\six.mp4 --conf-thres 0.6 --iou-thres 0.1