Repository: wyysf-98/GenMM
Branch: main
Commit: aee9bec5e1b5
Files: 32
Total size: 193.8 KB
Directory structure:
gitextract_jk8oqutc/
├── .gitignore
├── GenMM.py
├── LICENSE
├── README.md
├── __init__.py
├── configs/
│ ├── default.yaml
│ └── ganimator.yaml
├── dataset/
│ ├── blender_motion.py
│ ├── bvh/
│ │ ├── Quaternions.py
│ │ ├── bvh_io.py
│ │ ├── bvh_parser.py
│ │ └── bvh_writer.py
│ ├── bvh_motion.py
│ ├── motion.py
│ └── tracks_motion.py
├── demo.blend
├── docker/
│ ├── Dockerfile
│ ├── README.md
│ ├── apt-sources.list
│ ├── requirements.txt
│ └── requirements_blender.txt
├── fix_contact.py
├── nearest_neighbor/
│ ├── losses.py
│ └── utils.py
├── run_random_generation.py
├── run_web_server.py
└── utils/
├── base.py
├── contact.py
├── kinematics.py
├── rename_mixamo_rig.py
├── skeleton.py
└── transforms.py
================================================
FILE CONTENTS
================================================
================================================
FILE: .gitignore
================================================
*.json
# Byte-compiled / optimized / DLL files
__pycache__/
*.py[cod]
*$py.class
out/
# C extensions
*.so
*.pkl
# Distribution / packaging
.Python
build/
develop-eggs/
distf/
downloads/
eggs/
.eggs/
lib/
lib64/
parts/
sdist/
var/
wheels/
wandb/
pip-wheel-metadata/
share/python-wheels/
*.egg-info/
.installed.cfg
*.egg
MANIFEST
.vscode/*
.vscode/settings.json
# PyInstaller
# Usually these files are written by a python script from a template
# before PyInstaller builds the exe, so as to inject date/other infos into it.
*.manifest
*.spec
# Installer logs
pip-log.txt
pip-delete-this-directory.txt
# Unit test / coverage reports
htmlcov/
.tox/
.nox/
.coverage
.coverage.*
.cache
nosetests.xml
coverage.xml
*.cover
*.py,cover
.hypothesis/
.pytest_cache/
# Translations
*.mo
*.pot
# Django stuff:
*.log
local_settings.py
db.sqlite3
db.sqlite3-journal
# Flask stuff:
instance/
.webassets-cache
# Scrapy stuff:
.scrapy
# Sphinx documentation
docs/_build/
# PyBuilder
# target/
# Jupyter Notebook
.ipynb_checkpoints
# IPython
profile_default/
ipython_config.py
# pyenv
.python-version
# pipenv
# According to pypa/pipenv#598, it is recommended to include Pipfile.lock in version control.
# However, in case of collaboration, if having platform-specific dependencies or dependencies
# having no cross-platform support, pipenv may install dependencies that don't work, or not
# install all needed dependencies.
#Pipfile.lock
# PEP 582; used by e.g. github.com/David-OConnor/pyflow
__pypackages__/
# Celery stuff
celerybeat-schedule
celerybeat.pid
# SageMath parsed files
*.sage.py
# Environments
.env
.venv
venv/
env.bak/
venv.bak/
# Rope project settings
.ropeproject
# mkdocs documentation
/site
# Pyre type checker
.pyre/
checkpoints/
data/*
output/
log/
runs/
*.png
*.jpg
*.mp4
*.gif
*.pkl
*.pt
================================================
FILE: GenMM.py
================================================
import os
import os.path as osp
import numpy as np
import torch
import torch.nn.functional as F
from utils.base import logger
class GenMM:
def __init__(self, mode = 'random_synthesis', noise_sigma = 1.0, coarse_ratio = 0.2, coarse_ratio_factor = 6, pyr_factor = 0.75, num_stages_limit = -1, device = 'cuda:0', silent = False):
'''
GenMM main constructor
Args:
device : str = 'cuda:0', default device.
silent : bool = False, whether to mute the output.
'''
self.device = torch.device(device)
self.silent = silent
def _get_pyramid_lengths(self, final_len, coarse_ratio, pyr_factor):
'''
Get a list of pyramid lengths using given target length and ratio
'''
lengths = [int(np.round(final_len * coarse_ratio))]
while lengths[-1] < final_len:
lengths.append(int(np.round(lengths[-1] / pyr_factor)))
if lengths[-1] == lengths[-2]:
lengths[-1] += 1
lengths[-1] = final_len
return lengths
def _get_target_pyramid(self, target, coarse_ratio, pyr_factor, num_stages_limit=-1):
'''
Reads a target motion(s) and create a pyraimd out of it. Ordered in increatorch.sing size
'''
self.num_target = len(target)
lengths = []
min_len = 10000
for i in range(len(target)):
new_length = self._get_pyramid_lengths(len(target[i].motion_data), coarse_ratio, pyr_factor)
min_len = min(min_len, len(new_length))
if num_stages_limit != -1:
new_length = new_length[:num_stages_limit]
lengths.append(new_length)
for i in range(len(target)):
lengths[i] = lengths[i][-min_len:]
self.pyraimd_lengths = lengths
target_pyramid = [[] for _ in range(len(lengths[0]))]
for step in range(len(lengths[0])):
for i in range(len(target)):
length = lengths[i][step]
target_pyramid[step].append(target[i].sample(size=length).to(self.device))
if not self.silent:
print('Levels:', lengths)
for i in range(len(target_pyramid)):
print(f'Number of clips in target pyramid {i} is {len(target_pyramid[i])}, ranging {[[tgt.min(), tgt.max()] for tgt in target_pyramid[i]]}')
return target_pyramid
def _get_initial_motion(self, init_length, noise_sigma):
'''
Prepare the initial motion for optimization
'''
initial_motion = F.interpolate(torch.cat([self.target_pyramid[0][i] for i in range(self.num_target)], dim=-1),
size=init_length, mode='linear', align_corners=True)
if noise_sigma > 0:
initial_motion_w_noise = initial_motion + torch.randn_like(initial_motion) * noise_sigma
initial_motion_w_noise = torch.fmod(initial_motion_w_noise, 1.0)
else:
initial_motion_w_noise = initial_motion
if not self.silent:
print('Initial motion:', initial_motion.min(), initial_motion.max())
print('Initial motion with noise:', initial_motion_w_noise.min(), initial_motion_w_noise.max())
return initial_motion_w_noise
def run(self, target, criteria, num_frames, num_steps, noise_sigma, patch_size, coarse_ratio, pyr_factor, ext=None, debug_dir=None):
'''
generation function
Args:
mode : - string = 'x?', generate x times longer frames results
: - int, specifying the number of times to generate
noise_sigma : float = 1.0, random noise.
coarse_ratio : float = 0.2, ratio at the coarse level.
pyr_factor : float = 0.75, pyramid factor.
num_stages_limit : int = -1, no limit.
'''
if debug_dir is not None:
from tensorboardX import SummaryWriter
writer = SummaryWriter(log_dir=debug_dir)
# build target pyramid
if 'patchsize' in coarse_ratio:
coarse_ratio = patch_size * float(coarse_ratio.split('x_')[0]) / max([len(t.motion_data) for t in target])
elif 'nframes' in coarse_ratio:
coarse_ratio = float(coarse_ratio.split('x_')[0])
else:
raise ValueError('Unsupported coarse ratio specified')
self.target_pyramid = self._get_target_pyramid(target, coarse_ratio, pyr_factor)
# get the initial motion data
if 'nframes' in num_frames:
syn_length = int(sum([i[-1] for i in self.pyraimd_lengths]) * float(num_frames.split('x_')[0]))
elif num_frames.isdigit():
syn_length = int(num_frames)
else:
raise ValueError(f'Unsupported mode {self.mode}')
self.synthesized_lengths = self._get_pyramid_lengths(syn_length, coarse_ratio, pyr_factor)
if not self.silent:
print('Synthesized lengths:', self.synthesized_lengths)
self.synthesized = self._get_initial_motion(self.synthesized_lengths[0], noise_sigma)
# perform the optimization
self.synthesized.requires_grad_(False)
self.pbar = logger(num_steps, len(self.target_pyramid))
for lvl, lvl_target in enumerate(self.target_pyramid):
self.pbar.new_lvl()
if lvl > 0:
with torch.no_grad():
self.synthesized = F.interpolate(self.synthesized.detach(), size=self.synthesized_lengths[lvl], mode='linear')
self.synthesized, losses = GenMM.match_and_blend(self.synthesized, lvl_target, criteria, num_steps, self.pbar, ext=ext)
criteria.clean_cache()
if debug_dir is not None:
for itr in range(len(losses)):
writer.add_scalar(f'optimize/losses_lvl{lvl}', losses[itr], itr)
self.pbar.pbar.close()
return self.synthesized.detach()
@staticmethod
@torch.no_grad()
def match_and_blend(synthesized, targets, criteria, n_steps, pbar, ext=None):
'''
Minimizes criteria between synthesized and target
Args:
synthesized : torch.Tensor, optimized motion data
targets : torch.Tensor, target motion data
criteria : optimize target function
n_steps : int, number of steps to optimize
pbar : logger
ext : extra configurations or constraints (optional)
'''
losses = []
keyframe_motion = targets[0] if isinstance(targets, list) else targets
syn_length = synthesized.shape[-1]
km_length = keyframe_motion.shape[-1]
print("Synthesized shape:", synthesized.shape)
print("Keyframe_motion shape:", keyframe_motion.shape)
# Use the class-level KEYFRAME_INDICES
keyframe_indices = GenMM.KEYFRAME_INDICES
for _i in range(n_steps):
synthesized, loss = criteria(synthesized, targets, ext=ext, return_blended_results=True)
# Manually set the keyframes in synthesized motion to be the ones from the input motion
if syn_length >= keyframe_indices.stop and km_length >= keyframe_indices.stop:
synthesized[..., keyframe_indices] = keyframe_motion[..., keyframe_indices]
# Update status
losses.append(loss.item())
pbar.step()
pbar.print()
return synthesized, losses
================================================
FILE: LICENSE
================================================
Apache License
Version 2.0, January 2004
http://www.apache.org/licenses/
TERMS AND CONDITIONS FOR USE, REPRODUCTION, AND DISTRIBUTION
1. Definitions.
"License" shall mean the terms and conditions for use, reproduction,
and distribution as defined by Sections 1 through 9 of this document.
"Licensor" shall mean the copyright owner or entity authorized by
the copyright owner that is granting the License.
"Legal Entity" shall mean the union of the acting entity and all
other entities that control, are controlled by, or are under common
control with that entity. For the purposes of this definition,
"control" means (i) the power, direct or indirect, to cause the
direction or management of such entity, whether by contract or
otherwise, or (ii) ownership of fifty percent (50%) or more of the
outstanding shares, or (iii) beneficial ownership of such entity.
"You" (or "Your") shall mean an individual or Legal Entity
exercising permissions granted by this License.
"Source" form shall mean the preferred form for making modifications,
including but not limited to software source code, documentation
source, and configuration files.
"Object" form shall mean any form resulting from mechanical
transformation or translation of a Source form, including but
not limited to compiled object code, generated documentation,
and conversions to other media types.
"Work" shall mean the work of authorship, whether in Source or
Object form, made available under the License, as indicated by a
copyright notice that is included in or attached to the work
(an example is provided in the Appendix below).
"Derivative Works" shall mean any work, whether in Source or Object
form, that is based on (or derived from) the Work and for which the
editorial revisions, annotations, elaborations, or other modifications
represent, as a whole, an original work of authorship. For the purposes
of this License, Derivative Works shall not include works that remain
separable from, or merely link (or bind by name) to the interfaces of,
the Work and Derivative Works thereof.
"Contribution" shall mean any work of authorship, including
the original version of the Work and any modifications or additions
to that Work or Derivative Works thereof, that is intentionally
submitted to Licensor for inclusion in the Work by the copyright owner
or by an individual or Legal Entity authorized to submit on behalf of
the copyright owner. For the purposes of this definition, "submitted"
means any form of electronic, verbal, or written communication sent
to the Licensor or its representatives, including but not limited to
communication on electronic mailing lists, source code control systems,
and issue tracking systems that are managed by, or on behalf of, the
Licensor for the purpose of discussing and improving the Work, but
excluding communication that is conspicuously marked or otherwise
designated in writing by the copyright owner as "Not a Contribution."
"Contributor" shall mean Licensor and any individual or Legal Entity
on behalf of whom a Contribution has been received by Licensor and
subsequently incorporated within the Work.
2. Grant of Copyright License. Subject to the terms and conditions of
this License, each Contributor hereby grants to You a perpetual,
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
copyright license to reproduce, prepare Derivative Works of,
publicly display, publicly perform, sublicense, and distribute the
Work and such Derivative Works in Source or Object form.
3. Grant of Patent License. Subject to the terms and conditions of
this License, each Contributor hereby grants to You a perpetual,
worldwide, non-exclusive, no-charge, royalty-free, irrevocable
(except as stated in this section) patent license to make, have made,
use, offer to sell, sell, import, and otherwise transfer the Work,
where such license applies only to those patent claims licensable
by such Contributor that are necessarily infringed by their
Contribution(s) alone or by combination of their Contribution(s)
with the Work to which such Contribution(s) was submitted. If You
institute patent litigation against any entity (including a
cross-claim or counterclaim in a lawsuit) alleging that the Work
or a Contribution incorporated within the Work constitutes direct
or contributory patent infringement, then any patent licenses
granted to You under this License for that Work shall terminate
as of the date such litigation is filed.
4. Redistribution. You may reproduce and distribute copies of the
Work or Derivative Works thereof in any medium, with or without
modifications, and in Source or Object form, provided that You
meet the following conditions:
(a) You must give any other recipients of the Work or
Derivative Works a copy of this License; and
(b) You must cause any modified files to carry prominent notices
stating that You changed the files; and
(c) You must retain, in the Source form of any Derivative Works
that You distribute, all copyright, patent, trademark, and
attribution notices from the Source form of the Work,
excluding those notices that do not pertain to any part of
the Derivative Works; and
(d) If the Work includes a "NOTICE" text file as part of its
distribution, then any Derivative Works that You distribute must
include a readable copy of the attribution notices contained
within such NOTICE file, excluding those notices that do not
pertain to any part of the Derivative Works, in at least one
of the following places: within a NOTICE text file distributed
as part of the Derivative Works; within the Source form or
documentation, if provided along with the Derivative Works; or,
within a display generated by the Derivative Works, if and
wherever such third-party notices normally appear. The contents
of the NOTICE file are for informational purposes only and
do not modify the License. You may add Your own attribution
notices within Derivative Works that You distribute, alongside
or as an addendum to the NOTICE text from the Work, provided
that such additional attribution notices cannot be construed
as modifying the License.
You may add Your own copyright statement to Your modifications and
may provide additional or different license terms and conditions
for use, reproduction, or distribution of Your modifications, or
for any such Derivative Works as a whole, provided Your use,
reproduction, and distribution of the Work otherwise complies with
the conditions stated in this License.
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
6. Trademarks. This License does not grant permission to use the trade
names, trademarks, service marks, or product names of the Licensor,
except as required for reasonable and customary use in describing the
origin of the Work and reproducing the content of the NOTICE file.
7. Disclaimer of Warranty. Unless required by applicable law or
agreed to in writing, Licensor provides the Work (and each
Contributor provides its Contributions) on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or
implied, including, without limitation, any warranties or conditions
of TITLE, NON-INFRINGEMENT, MERCHANTABILITY, or FITNESS FOR A
PARTICULAR PURPOSE. You are solely responsible for determining the
appropriateness of using or redistributing the Work and assume any
risks associated with Your exercise of permissions under this License.
8. Limitation of Liability. In no event and under no legal theory,
whether in tort (including negligence), contract, or otherwise,
unless required by applicable law (such as deliberate and grossly
negligent acts) or agreed to in writing, shall any Contributor be
liable to You for damages, including any direct, indirect, special,
incidental, or consequential damages of any character arising as a
result of this License or out of the use or inability to use the
Work (including but not limited to damages for loss of goodwill,
work stoppage, computer failure or malfunction, or any and all
other commercial damages or losses), even if such Contributor
has been advised of the possibility of such damages.
9. Accepting Warranty or Additional Liability. While redistributing
the Work or Derivative Works thereof, You may choose to offer,
and charge a fee for, acceptance of support, warranty, indemnity,
or other liability obligations and/or rights consistent with this
License. However, in accepting such obligations, You may act only
on Your own behalf and on Your sole responsibility, not on behalf
of any other Contributor, and only if You agree to indemnify,
defend, and hold each Contributor harmless for any liability
incurred by, or claims asserted against, such Contributor by reason
of your accepting any such warranty or additional liability.
END OF TERMS AND CONDITIONS
APPENDIX: How to apply the Apache License to your work.
To apply the Apache License to your work, attach the following
boilerplate notice, with the fields enclosed by brackets "[]"
replaced with your own identifying information. (Don't include
the brackets!) The text should be enclosed in the appropriate
comment syntax for the file format. We also recommend that a
file or class name and description of purpose be included on the
same "printed page" as the copyright notice for easier
identification within third-party archives.
Copyright [yyyy] [name of copyright owner]
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
================================================
FILE: README.md
================================================
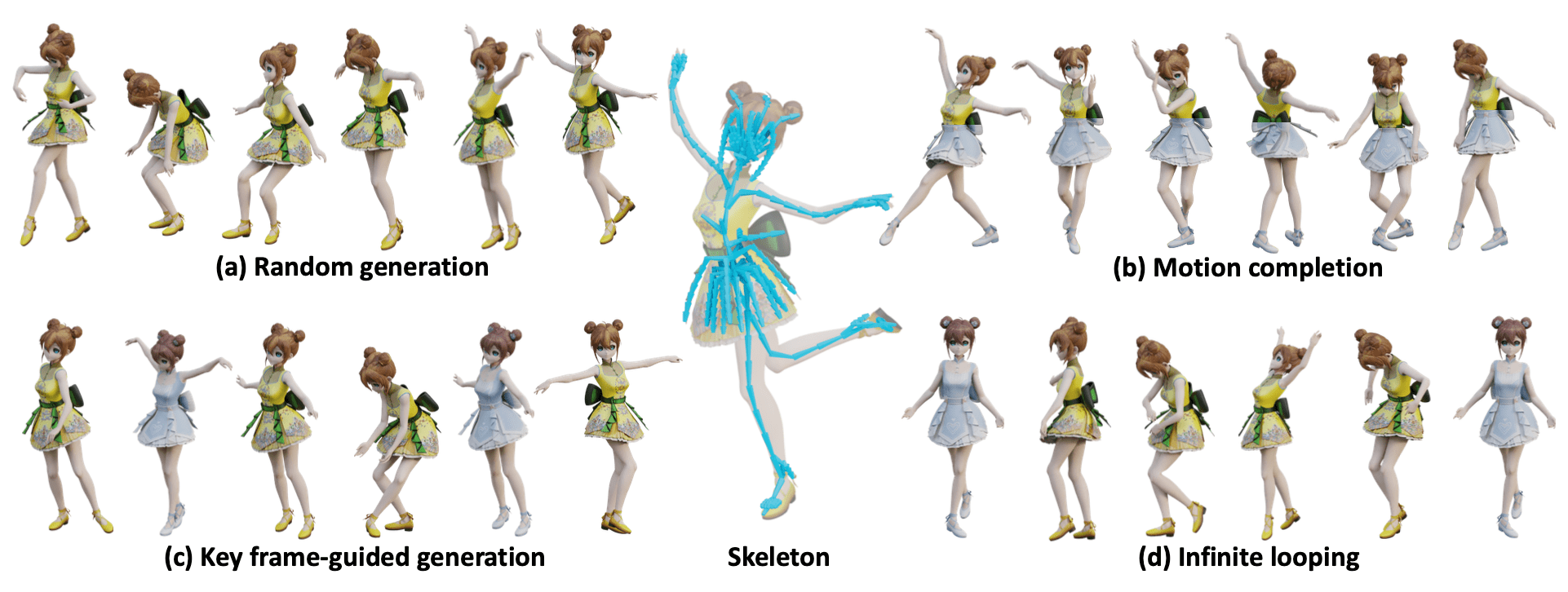
# Example-based Motion Synthesis via Generative Motion Matching, ACM Transactions on Graphics (Proceedings of SIGGRAPH 2023)
##### [Weiyu Li*](https://wyysf-98.github.io/), [Xuelin Chen*†](https://xuelin-chen.github.io/), [Peizhuo Li](https://peizhuoli.github.io/), [Olga Sorkine-Hornung](https://igl.ethz.ch/people/sorkine/), [Baoquan Chen](https://cfcs.pku.edu.cn/baoquan/)
#### [Project Page](https://wyysf-98.github.io/GenMM) | [ArXiv](https://arxiv.org/abs/2306.00378) | [Paper](https://wyysf-98.github.io/GenMM/paper/Paper_high_res.pdf) | [Video](https://youtu.be/lehnxcade4I)
All Code and demo will be released in this week(still ongoing...) 🏗️ 🚧 🔨
- [x] Release main code
- [x] Release blender addon
- [x] Detailed README and installation guide
- [ ] Release skeleton-aware component, WIP as we need to split the joints into groups manually.
- [ ] Release codes for evaluation
## Prerequisite
Setup environment
:smiley: We also provide a Dockerfile for easy installation, see [Setup using Docker](./docker/README.md).
- Python 3.8
- PyTorch 1.12.1
- [unfoldNd](https://github.com/f-dangel/unfoldNd)
Clone this repository.
```sh
git clone git@github.com:wyysf-98/GenMM.git
```
Install the required packages.
```sh
conda create -n GenMM python=3.8
conda activate GenMM
conda install -c pytorch pytorch=1.12.1 torchvision=0.13.1 cudatoolkit=11.3 && \
pip install -r docker/requirements.txt
pip install torch-scatter==2.1.1
```
## Quick inference demo
For local quick inference demo using .bvh file, you can use
```sh
python run_random_generation.py -i './data/Malcolm/Gangnam-Style.bvh'
```
More configuration can be found in the `run_random_generation.py`.
We use an Apple M1 and NVIDIA Tesla V100 with 32 GB RAM to generate each motion, which takes about ~0.2s and ~0.05s as mentioned in our paper.
## Blender add-on
You can install and use the blender add-on with easy installation as our method is efficient and you do not need to install CUDA Toolkit.
We test our code using blender 3.22.0, and will support 2.8.0 in the future.
Step 1: Find yout blender python path. Common paths are as follows
```sh
(Windows) 'C:\Program Files\Blender Foundation\Blender 3.2\3.2\python\bin'
(Linux) '/path/to/blender/blender-path/3.2/python/bin'
(Windows) '/Applications/Blender.app/Contents/Resources/3.2/python/bin'
```
Step 2: Install required packages. Open your shell(Linux) or powershell(Windows),
```sh
cd {your python path} && pip3 install -r docker/requirements.txt && pip3 install torch-scatter==2.1.0 -f https://data.pyg.org/whl/torch-1.12.0+${CUDA}.html
```
, where ${CUDA} should be replaced by either cpu, cu117, or cu118 depending on your PyTorch installation.
On my MacOS with M1 cpu,
```sh
cd /Applications/Blender.app/Contents/Resources/3.2/python/bin && pip3 install -r docker/requirements_blender.txt && pip3 install torch-scatter==2.1.0 -f https://data.pyg.org/whl/torch-1.12.0+cpu.html
```
Step 3: Install add-on in blender. [Blender Add-ons Official Tutorial](https://docs.blender.org/manual/en/latest/editors/preferences/addons.html). `edit -> Preferences -> Add-ons -> Install -> Select the downloaded .zip file`
Step 4: Have fun! Click the armature and you will find a `GenMM` tag.
(GPU support) If you have GPU and CUDA Toolskits installed, we automatically dectect the running device.
Feel free to submit an issue if you run into any issues during the installation :)
## Acknowledgement
We thank [@stefanonuvoli](https://github.com/stefanonuvoli/skinmixer) for the help for the discussion of implementation about `Motion Reassembly` part (we eventually manually merged the meshes of different characters). And [@Radamés Ajna](https://github.com/radames) for the help of a better huggingface demo.
## Citation
If you find our work useful for your research, please consider citing using the following BibTeX entry.
```BibTeX
@article{10.1145/weiyu23GenMM,
author = {Li, Weiyu and Chen, Xuelin and Li, Peizhuo and Sorkine-Hornung, Olga and Chen, Baoquan},
title = {Example-Based Motion Synthesis via Generative Motion Matching},
journal = {ACM Transactions on Graphics (TOG)},
volume = {42},
number = {4},
year = {2023},
articleno = {94},
doi = {10.1145/3592395},
publisher = {Association for Computing Machinery},
}
```
================================================
FILE: __init__.py
================================================
# This program is free software; you can redistribute it and/or modify
# it under the terms of the GNU General Public License as published by
# the Free Software Foundation; either version 3 of the License, or
# (at your option) any later version.
#
# This program is distributed in the hope that it will be useful, but
# WITHOUT ANY WARRANTY; without even the implied warranty of
# MERCHANTIBILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
# General Public License for more details.
#
# You should have received a copy of the GNU General Public License
# along with this program. If not, see .
import os
import sys
import bpy
import torch
import mathutils
import numpy as np
from math import degrees, radians, ceil
from mathutils import Vector, Matrix, Euler
from typing import List, Iterable, Tuple, Any, Dict
abs_path = os.path.abspath(__file__)
sys.path.append(os.path.dirname(abs_path))
from GenMM import GenMM
from nearest_neighbor.losses import PatchCoherentLoss
from dataset.blender_motion import BlenderMotion
bl_info = {
"name" : "GenMM",
"author" : "Weiyu Li",
"description" : "Blender addon for SIGGRAPH paper 'Example-Based Motion Synthesis via Generative Motion Matching'",
"blender" : (3, 2, 0),
"version" : (0, 0, 1),
"location": "3D View",
"description": "Synthesis novel motions form a few exemplars.",
"location" : "",
"support": "TESTING",
"warning" : "",
"category" : "Generic"
}
def capture_rest_pose(armature_obj):
"""Capture the rest pose bone data (head, tail, roll) from an armature."""
rest_pose_data = {}
bpy.ops.object.mode_set(mode='EDIT')
arm_data = armature_obj.data
for bone in arm_data.edit_bones:
rest_pose_data[bone.name] = {
'head': bone.head.copy(),
'tail': bone.tail.copy(),
'roll': bone.roll,
'matrix_local': bone.matrix.copy()
}
bpy.ops.object.mode_set(mode='OBJECT')
return rest_pose_data
# This function is modified from
# https://github.com/bwrsandman/blender-addons/blob/master/io_anim_bvh
def get_bvh_data(context,
frame_end,
frame_start,
global_scale=1.0,
rotate_mode='NATIVE',
root_transform_only=False,
):
def ensure_rot_order(rot_order_str):
if set(rot_order_str) != {'X', 'Y', 'Z'}:
rot_order_str = "XYZ"
return rot_order_str
file_str = []
obj = context.object
arm = obj.data
# Build a dictionary of children.
# None for parentless
children = {None: []}
# initialize with blank lists
for bone in arm.bones:
children[bone.name] = []
# keep bone order from armature, no sorting, not esspential but means
# we can maintain order from import -> export which secondlife incorrectly expects.
for bone in arm.bones:
children[getattr(bone.parent, "name", None)].append(bone.name)
# bone name list in the order that the bones are written
serialized_names = []
node_locations = {}
file_str.append("HIERARCHY\n")
def write_recursive_nodes(bone_name, indent):
my_children = children[bone_name]
indent_str = "\t" * indent
bone = arm.bones[bone_name]
pose_bone = obj.pose.bones[bone_name]
loc = bone.head_local
node_locations[bone_name] = loc
if rotate_mode == "NATIVE":
rot_order_str = ensure_rot_order(pose_bone.rotation_mode)
else:
rot_order_str = rotate_mode
# make relative if we can
if bone.parent:
loc = loc - node_locations[bone.parent.name]
if indent:
file_str.append("%sJOINT %s\n" % (indent_str, bone_name))
else:
file_str.append("%sROOT %s\n" % (indent_str, bone_name))
file_str.append("%s{\n" % indent_str)
file_str.append("%s\tOFFSET %.6f %.6f %.6f\n" % (indent_str, loc.x * global_scale, loc.y * global_scale, loc.z * global_scale))
if (bone.use_connect or root_transform_only) and bone.parent:
file_str.append("%s\tCHANNELS 3 %srotation %srotation %srotation\n" % (indent_str, rot_order_str[0], rot_order_str[1], rot_order_str[2]))
else:
file_str.append("%s\tCHANNELS 6 Xposition Yposition Zposition %srotation %srotation %srotation\n" % (indent_str, rot_order_str[0], rot_order_str[1], rot_order_str[2]))
if my_children:
# store the location for the children
# to get their relative offset
# Write children
for child_bone in my_children:
serialized_names.append(child_bone)
write_recursive_nodes(child_bone, indent + 1)
else:
# Write the bone end.
file_str.append("%s\tEnd Site\n" % indent_str)
file_str.append("%s\t{\n" % indent_str)
loc = bone.tail_local - node_locations[bone_name]
file_str.append("%s\t\tOFFSET %.6f %.6f %.6f\n" % (indent_str, loc.x * global_scale, loc.y * global_scale, loc.z * global_scale))
file_str.append("%s\t}\n" % indent_str)
file_str.append("%s}\n" % indent_str)
if len(children[None]) == 1:
key = children[None][0]
serialized_names.append(key)
indent = 0
write_recursive_nodes(key, indent)
else:
# Write a dummy parent node, with a dummy key name
# Just be sure it's not used by another bone!
i = 0
key = "__%d" % i
while key in children:
i += 1
key = "__%d" % i
file_str.append("ROOT %s\n" % key)
file_str.append("{\n")
file_str.append("\tOFFSET 0.0 0.0 0.0\n")
file_str.append("\tCHANNELS 0\n") # Xposition Yposition Zposition Xrotation Yrotation Zrotation
indent = 1
# Write children
for child_bone in children[None]:
serialized_names.append(child_bone)
write_recursive_nodes(child_bone, indent)
file_str.append("}\n")
file_str = ''.join(file_str)
# redefine bones as sorted by serialized_names
# so we can write motion
class DecoratedBone:
__slots__ = (
# Bone name, used as key in many places.
"name",
"parent", # decorated bone parent, set in a later loop
# Blender armature bone.
"rest_bone",
# Blender pose bone.
"pose_bone",
# Blender pose matrix.
"pose_mat",
# Blender rest matrix (armature space).
"rest_arm_mat",
# Blender rest matrix (local space).
"rest_local_mat",
# Pose_mat inverted.
"pose_imat",
# Rest_arm_mat inverted.
"rest_arm_imat",
# Rest_local_mat inverted.
"rest_local_imat",
# Last used euler to preserve euler compatibility in between keyframes.
"prev_euler",
# Is the bone disconnected to the parent bone?
"skip_position",
"rot_order",
"rot_order_str",
# Needed for the euler order when converting from a matrix.
"rot_order_str_reverse",
)
_eul_order_lookup = {
'XYZ': (0, 1, 2),
'XZY': (0, 2, 1),
'YXZ': (1, 0, 2),
'YZX': (1, 2, 0),
'ZXY': (2, 0, 1),
'ZYX': (2, 1, 0),
}
def __init__(self, bone_name):
self.name = bone_name
self.rest_bone = arm.bones[bone_name]
self.pose_bone = obj.pose.bones[bone_name]
if rotate_mode == "NATIVE":
self.rot_order_str = ensure_rot_order(self.pose_bone.rotation_mode)
else:
self.rot_order_str = rotate_mode
self.rot_order_str_reverse = self.rot_order_str[::-1]
self.rot_order = DecoratedBone._eul_order_lookup[self.rot_order_str]
self.pose_mat = self.pose_bone.matrix
# mat = self.rest_bone.matrix # UNUSED
self.rest_arm_mat = self.rest_bone.matrix_local
self.rest_local_mat = self.rest_bone.matrix
# inverted mats
self.pose_imat = self.pose_mat.inverted()
self.rest_arm_imat = self.rest_arm_mat.inverted()
self.rest_local_imat = self.rest_local_mat.inverted()
self.parent = None
self.prev_euler = Euler((0.0, 0.0, 0.0), self.rot_order_str_reverse)
self.skip_position = ((self.rest_bone.use_connect or root_transform_only) and self.rest_bone.parent)
def update_posedata(self):
self.pose_mat = self.pose_bone.matrix
self.pose_imat = self.pose_mat.inverted()
def __repr__(self):
if self.parent:
return "[\"%s\" child on \"%s\"]\n" % (self.name, self.parent.name)
else:
return "[\"%s\" root bone]\n" % (self.name)
bones_decorated = [DecoratedBone(bone_name) for bone_name in serialized_names]
# Assign parents
bones_decorated_dict = {dbone.name: dbone for dbone in bones_decorated}
for dbone in bones_decorated:
parent = dbone.rest_bone.parent
if parent:
dbone.parent = bones_decorated_dict[parent.name]
del bones_decorated_dict
# finish assigning parents
scene = context.scene
frame_current = scene.frame_current
file_str += "MOTION\n"
file_str += "Frames: %d\n" % (frame_end - frame_start + 1)
file_str += "Frame Time: %.6f\n" % (1.0 / (scene.render.fps / scene.render.fps_base))
for frame in range(frame_start, frame_end + 1):
scene.frame_set(frame)
for dbone in bones_decorated:
dbone.update_posedata()
for dbone in bones_decorated:
trans = Matrix.Translation(dbone.rest_bone.head_local)
itrans = Matrix.Translation(-dbone.rest_bone.head_local)
if dbone.parent:
mat_final = dbone.parent.rest_arm_mat @ dbone.parent.pose_imat @ dbone.pose_mat @ dbone.rest_arm_imat
mat_final = itrans @ mat_final @ trans
loc = mat_final.to_translation() + (dbone.rest_bone.head_local - dbone.parent.rest_bone.head_local)
else:
mat_final = dbone.pose_mat @ dbone.rest_arm_imat
mat_final = itrans @ mat_final @ trans
loc = mat_final.to_translation() + dbone.rest_bone.head
# keep eulers compatible, no jumping on interpolation.
rot = mat_final.to_euler(dbone.rot_order_str_reverse, dbone.prev_euler)
if not dbone.skip_position:
file_str += "%.6f %.6f %.6f " % (loc * global_scale)[:]
file_str += "%.6f %.6f %.6f " % (degrees(rot[dbone.rot_order[0]]), degrees(rot[dbone.rot_order[1]]), degrees(rot[dbone.rot_order[2]]))
dbone.prev_euler = rot
file_str += "\n"
scene.frame_set(frame_current)
return file_str
class BVH_Node:
__slots__ = (
# Bvh joint name.
'name',
# BVH_Node type or None for no parent.
'parent',
# A list of children of this type..
'children',
# Worldspace rest location for the head of this node.
'rest_head_world',
# Localspace rest location for the head of this node.
'rest_head_local',
# Worldspace rest location for the tail of this node.
'rest_tail_world',
# Worldspace rest location for the tail of this node.
'rest_tail_local',
# List of 6 ints, -1 for an unused channel,
# otherwise an index for the BVH motion data lines,
# loc triple then rot triple.
'channels',
# A triple of indices as to the order rotation is applied.
# [0,1,2] is x/y/z - [None, None, None] if no rotation..
'rot_order',
# Same as above but a string 'XYZ' format..
'rot_order_str',
# A list one tuple's one for each frame: (locx, locy, locz, rotx, roty, rotz),
# euler rotation ALWAYS stored xyz order, even when native used.
'anim_data',
# Convenience function, bool, same as: (channels[0] != -1 or channels[1] != -1 or channels[2] != -1).
'has_loc',
# Convenience function, bool, same as: (channels[3] != -1 or channels[4] != -1 or channels[5] != -1).
'has_rot',
# Index from the file, not strictly needed but nice to maintain order.
'index',
# Use this for whatever you want.
'temp',
)
_eul_order_lookup = {
(None, None, None): 'XYZ', # XXX Dummy one, no rotation anyway!
(0, 1, 2): 'XYZ',
(0, 2, 1): 'XZY',
(1, 0, 2): 'YXZ',
(1, 2, 0): 'YZX',
(2, 0, 1): 'ZXY',
(2, 1, 0): 'ZYX',
}
def __init__(self, name, rest_head_world, rest_head_local, parent, channels, rot_order, index):
self.name = name
self.rest_head_world = rest_head_world
self.rest_head_local = rest_head_local
self.rest_tail_world = None
self.rest_tail_local = None
self.parent = parent
self.channels = channels
self.rot_order = tuple(rot_order)
self.rot_order_str = BVH_Node._eul_order_lookup[self.rot_order]
self.index = index
# convenience functions
self.has_loc = channels[0] != -1 or channels[1] != -1 or channels[2] != -1
self.has_rot = channels[3] != -1 or channels[4] != -1 or channels[5] != -1
self.children = []
# List of 6 length tuples: (lx, ly, lz, rx, ry, rz)
# even if the channels aren't used they will just be zero.
self.anim_data = [(0, 0, 0, 0, 0, 0)]
def __repr__(self):
return (
"BVH name: '%s', rest_loc:(%.3f,%.3f,%.3f), rest_tail:(%.3f,%.3f,%.3f)" % (
self.name,
*self.rest_head_world,
*self.rest_head_world,
)
)
def sorted_nodes(bvh_nodes):
bvh_nodes_list = list(bvh_nodes.values())
bvh_nodes_list.sort(key=lambda bvh_node: bvh_node.index)
return bvh_nodes_list
def read_bvh(context, bvh_str, rotate_mode='XYZ', global_scale=1.0):
# Separate into a list of lists, each line a list of words.
file_lines = bvh_str
# Non standard carriage returns?
if len(file_lines) == 1:
file_lines = file_lines[0].split('\r')
# Split by whitespace.
file_lines = [ll for ll in [l.split() for l in file_lines] if ll]
# Create hierarchy as empties
if file_lines[0][0].lower() == 'hierarchy':
# print 'Importing the BVH Hierarchy for:', file_path
pass
else:
raise Exception("This is not a BVH file")
bvh_nodes = {None: None}
bvh_nodes_serial = [None]
bvh_frame_count = None
bvh_frame_time = None
channelIndex = -1
lineIdx = 0 # An index for the file.
while lineIdx < len(file_lines) - 1:
if file_lines[lineIdx][0].lower() in {'root', 'joint'}:
# Join spaces into 1 word with underscores joining it.
if len(file_lines[lineIdx]) > 2:
file_lines[lineIdx][1] = '_'.join(file_lines[lineIdx][1:])
file_lines[lineIdx] = file_lines[lineIdx][:2]
# MAY NEED TO SUPPORT MULTIPLE ROOTS HERE! Still unsure weather multiple roots are possible?
# Make sure the names are unique - Object names will match joint names exactly and both will be unique.
name = file_lines[lineIdx][1]
# print '%snode: %s, parent: %s' % (len(bvh_nodes_serial) * ' ', name, bvh_nodes_serial[-1])
lineIdx += 2 # Increment to the next line (Offset)
rest_head_local = global_scale * Vector((
float(file_lines[lineIdx][1]),
float(file_lines[lineIdx][2]),
float(file_lines[lineIdx][3]),
))
lineIdx += 1 # Increment to the next line (Channels)
# newChannel[Xposition, Yposition, Zposition, Xrotation, Yrotation, Zrotation]
# newChannel references indices to the motiondata,
# if not assigned then -1 refers to the last value that will be added on loading at a value of zero, this is appended
# We'll add a zero value onto the end of the MotionDATA so this always refers to a value.
my_channel = [-1, -1, -1, -1, -1, -1]
my_rot_order = [None, None, None]
rot_count = 0
for channel in file_lines[lineIdx][2:]:
channel = channel.lower()
channelIndex += 1 # So the index points to the right channel
if channel == 'xposition':
my_channel[0] = channelIndex
elif channel == 'yposition':
my_channel[1] = channelIndex
elif channel == 'zposition':
my_channel[2] = channelIndex
elif channel == 'xrotation':
my_channel[3] = channelIndex
my_rot_order[rot_count] = 0
rot_count += 1
elif channel == 'yrotation':
my_channel[4] = channelIndex
my_rot_order[rot_count] = 1
rot_count += 1
elif channel == 'zrotation':
my_channel[5] = channelIndex
my_rot_order[rot_count] = 2
rot_count += 1
channels = file_lines[lineIdx][2:]
my_parent = bvh_nodes_serial[-1] # account for none
# Apply the parents offset accumulatively
if my_parent is None:
rest_head_world = Vector(rest_head_local)
else:
rest_head_world = my_parent.rest_head_world + rest_head_local
bvh_node = bvh_nodes[name] = BVH_Node(
name,
rest_head_world,
rest_head_local,
my_parent,
my_channel,
my_rot_order,
len(bvh_nodes) - 1,
)
# If we have another child then we can call ourselves a parent, else
bvh_nodes_serial.append(bvh_node)
# Account for an end node.
# There is sometimes a name after 'End Site' but we will ignore it.
if file_lines[lineIdx][0].lower() == 'end' and file_lines[lineIdx][1].lower() == 'site':
# Increment to the next line (Offset)
lineIdx += 2
rest_tail = global_scale * Vector((
float(file_lines[lineIdx][1]),
float(file_lines[lineIdx][2]),
float(file_lines[lineIdx][3]),
))
bvh_nodes_serial[-1].rest_tail_world = bvh_nodes_serial[-1].rest_head_world + rest_tail
bvh_nodes_serial[-1].rest_tail_local = bvh_nodes_serial[-1].rest_head_local + rest_tail
# Just so we can remove the parents in a uniform way,
# the end has kids so this is a placeholder.
bvh_nodes_serial.append(None)
if len(file_lines[lineIdx]) == 1 and file_lines[lineIdx][0] == '}': # == ['}']
bvh_nodes_serial.pop() # Remove the last item
# End of the hierarchy. Begin the animation section of the file with
# the following header.
# MOTION
# Frames: n
# Frame Time: dt
if len(file_lines[lineIdx]) == 1 and file_lines[lineIdx][0].lower() == 'motion':
lineIdx += 1 # Read frame count.
if (
len(file_lines[lineIdx]) == 2 and
file_lines[lineIdx][0].lower() == 'frames:'
):
bvh_frame_count = int(file_lines[lineIdx][1])
lineIdx += 1 # Read frame rate.
if (
len(file_lines[lineIdx]) == 3 and
file_lines[lineIdx][0].lower() == 'frame' and
file_lines[lineIdx][1].lower() == 'time:'
):
bvh_frame_time = float(file_lines[lineIdx][2])
lineIdx += 1 # Set the cursor to the first frame
break
lineIdx += 1
# Remove the None value used for easy parent reference
del bvh_nodes[None]
# Don't use anymore
del bvh_nodes_serial
# importing world with any order but nicer to maintain order
# second life expects it, which isn't to spec.
bvh_nodes_list = sorted_nodes(bvh_nodes)
while lineIdx < len(file_lines):
line = file_lines[lineIdx]
for bvh_node in bvh_nodes_list:
# for bvh_node in bvh_nodes_serial:
lx = ly = lz = rx = ry = rz = 0.0
channels = bvh_node.channels
anim_data = bvh_node.anim_data
if channels[0] != -1:
lx = global_scale * float(line[channels[0]])
if channels[1] != -1:
ly = global_scale * float(line[channels[1]])
if channels[2] != -1:
lz = global_scale * float(line[channels[2]])
if channels[3] != -1 or channels[4] != -1 or channels[5] != -1:
rx = radians(float(line[channels[3]]))
ry = radians(float(line[channels[4]]))
rz = radians(float(line[channels[5]]))
# Done importing motion data #
anim_data.append((lx, ly, lz, rx, ry, rz))
lineIdx += 1
# Assign children
for bvh_node in bvh_nodes_list:
bvh_node_parent = bvh_node.parent
if bvh_node_parent:
bvh_node_parent.children.append(bvh_node)
# Now set the tip of each bvh_node
for bvh_node in bvh_nodes_list:
if not bvh_node.rest_tail_world:
if len(bvh_node.children) == 0:
# could just fail here, but rare BVH files have childless nodes
bvh_node.rest_tail_world = Vector(bvh_node.rest_head_world)
bvh_node.rest_tail_local = Vector(bvh_node.rest_head_local)
elif len(bvh_node.children) == 1:
bvh_node.rest_tail_world = Vector(bvh_node.children[0].rest_head_world)
bvh_node.rest_tail_local = bvh_node.rest_head_local + bvh_node.children[0].rest_head_local
else:
# allow this, see above
# if not bvh_node.children:
# raise Exception("bvh node has no end and no children. bad file")
# Removed temp for now
rest_tail_world = Vector((0.0, 0.0, 0.0))
rest_tail_local = Vector((0.0, 0.0, 0.0))
for bvh_node_child in bvh_node.children:
rest_tail_world += bvh_node_child.rest_head_world
rest_tail_local += bvh_node_child.rest_head_local
bvh_node.rest_tail_world = rest_tail_world * (1.0 / len(bvh_node.children))
bvh_node.rest_tail_local = rest_tail_local * (1.0 / len(bvh_node.children))
# Make sure tail isn't the same location as the head.
if (bvh_node.rest_tail_local - bvh_node.rest_head_local).length <= 0.001 * global_scale:
print("\tzero length node found:", bvh_node.name)
bvh_node.rest_tail_local.y = bvh_node.rest_tail_local.y + global_scale / 10
bvh_node.rest_tail_world.y = bvh_node.rest_tail_world.y + global_scale / 10
return bvh_nodes, bvh_frame_time, bvh_frame_count
def bvh_node_dict2objects(context, bvh_name, bvh_nodes, rotate_mode='NATIVE', frame_start=1, IMPORT_LOOP=False):
if frame_start < 1:
frame_start = 1
scene = context.scene
for obj in scene.objects:
obj.select_set(False)
objects = []
def add_ob(name):
obj = bpy.data.objects.new(name, None)
context.collection.objects.link(obj)
objects.append(obj)
obj.select_set(True)
# nicer drawing.
obj.empty_display_type = 'CUBE'
obj.empty_display_size = 0.1
return obj
# Add objects
for name, bvh_node in bvh_nodes.items():
bvh_node.temp = add_ob(name)
bvh_node.temp.rotation_mode = bvh_node.rot_order_str[::-1]
# Parent the objects
for bvh_node in bvh_nodes.values():
for bvh_node_child in bvh_node.children:
bvh_node_child.temp.parent = bvh_node.temp
# Offset
for bvh_node in bvh_nodes.values():
# Make relative to parents offset
bvh_node.temp.location = bvh_node.rest_head_local
# Add tail objects
for name, bvh_node in bvh_nodes.items():
if not bvh_node.children:
ob_end = add_ob(name + '_end')
ob_end.parent = bvh_node.temp
ob_end.location = bvh_node.rest_tail_world - bvh_node.rest_head_world
for name, bvh_node in bvh_nodes.items():
obj = bvh_node.temp
for frame_current in range(len(bvh_node.anim_data)):
lx, ly, lz, rx, ry, rz = bvh_node.anim_data[frame_current]
if bvh_node.has_loc:
obj.delta_location = Vector((lx, ly, lz)) - bvh_node.rest_head_world
obj.keyframe_insert("delta_location", index=-1, frame=frame_start + frame_current)
if bvh_node.has_rot:
obj.delta_rotation_euler = rx, ry, rz
obj.keyframe_insert("delta_rotation_euler", index=-1, frame=frame_start + frame_current)
return objects
def bvh_node_dict2armature(
context,
bvh_name,
bvh_nodes,
bvh_frame_time,
rotate_mode='XYZ',
frame_start=1,
IMPORT_LOOP=False,
global_matrix=None,
use_fps_scale=False,
original_rest_pose=None # New parameter for the original rest pose
):
if frame_start < 1:
frame_start = 1
scene = context.scene
for obj in scene.objects:
obj.select_set(False)
arm_data = bpy.data.armatures.new(bvh_name)
arm_ob = bpy.data.objects.new(bvh_name, arm_data)
context.collection.objects.link(arm_ob)
arm_ob.select_set(True)
context.view_layer.objects.active = arm_ob
bpy.ops.object.mode_set(mode='EDIT', toggle=False)
bvh_nodes_list = sorted_nodes(bvh_nodes)
# Get the average bone length for zero length bones
average_bone_length = 0.0
nonzero_count = 0
for bvh_node in bvh_nodes_list:
l = (bvh_node.rest_head_local - bvh_node.rest_tail_local).length
if l:
average_bone_length += l
nonzero_count += 1
if not average_bone_length:
average_bone_length = 0.1
else:
average_bone_length = average_bone_length / nonzero_count
while arm_data.edit_bones:
arm_ob.edit_bones.remove(arm_data.edit_bones[-1])
ZERO_AREA_BONES = []
# First pass: Create all bones and assign to temp
for bvh_node in bvh_nodes_list:
bone = arm_data.edit_bones.new(bvh_node.name)
# Use the original rest pose if provided, otherwise fall back to BVH data
if original_rest_pose and bvh_node.name in original_rest_pose:
bone.head = original_rest_pose[bvh_node.name]['head']
bone.tail = original_rest_pose[bvh_node.name]['tail']
bone.roll = original_rest_pose[bvh_node.name]['roll']
else:
bone.head = bvh_node.rest_head_world
bone.tail = bvh_node.rest_tail_world
# Handle zero-length bones
if (bone.head - bone.tail).length < 0.001:
print("\tzero length bone found:", bone.name)
if bvh_node.parent:
ofs = bvh_node.parent.rest_head_local - bvh_node.parent.rest_tail_local
if ofs.length:
bone.tail = bone.tail - ofs
else:
bone.tail.y = bone.tail.y + average_bone_length
else:
bone.tail.y = bone.tail.y + average_bone_length
ZERO_AREA_BONES.append(bvh_node.name)
# Assign the edit bone to the temp attribute
bvh_node.temp = bone
# Second pass: Set parenting and connection
for bvh_node in bvh_nodes_list:
if bvh_node.parent:
# Now bvh_node.temp and bvh_node.parent.temp should both be valid
bvh_node.temp.parent = bvh_node.parent.temp
if (
(not bvh_node.has_loc) and
(bvh_node.parent.temp.name not in ZERO_AREA_BONES) and
(bvh_node.parent.rest_tail_local == bvh_node.rest_head_local)
):
bvh_node.temp.use_connect = True
# Replace temp with bone name for later use
for bvh_node in bvh_nodes_list:
bvh_node.temp = bvh_node.temp.name
bpy.ops.object.mode_set(mode='OBJECT', toggle=False)
pose = arm_ob.pose
pose_bones = pose.bones
if rotate_mode == 'NATIVE':
for bvh_node in bvh_nodes_list:
bone_name = bvh_node.temp
pose_bone = pose_bones[bone_name]
pose_bone.rotation_mode = bvh_node.rot_order_str
elif rotate_mode != 'QUATERNION':
for pose_bone in pose_bones:
pose_bone.rotation_mode = rotate_mode
context.view_layer.update()
arm_ob.animation_data_create()
action = bpy.data.actions.new(name=bvh_name)
arm_ob.animation_data.action = action
num_frame = 0
for bvh_node in bvh_nodes_list:
bone_name = bvh_node.temp
pose_bone = pose_bones[bone_name]
rest_bone = arm_data.bones[bone_name]
bone_rest_matrix = rest_bone.matrix_local.to_3x3()
bone_rest_matrix_inv = Matrix(bone_rest_matrix)
bone_rest_matrix_inv.invert()
bone_rest_matrix_inv.resize_4x4()
bone_rest_matrix.resize_4x4()
bvh_node.temp = (pose_bone, rest_bone, bone_rest_matrix, bone_rest_matrix_inv)
if 0 == num_frame:
num_frame = len(bvh_node.anim_data)
skip_frame = 1
if num_frame > skip_frame:
num_frame = num_frame - skip_frame
time = [float(frame_start)] * num_frame
if use_fps_scale:
dt = scene.render.fps * bvh_frame_time
for frame_i in range(1, num_frame):
time[frame_i] += float(frame_i) * dt
else:
for frame_i in range(1, num_frame):
time[frame_i] += float(frame_i)
for i, bvh_node in enumerate(bvh_nodes_list):
pose_bone, bone, bone_rest_matrix, bone_rest_matrix_inv = bvh_node.temp
if bvh_node.has_loc:
data_path = f'pose.bones["{pose_bone.name}"].location'
location = [(0.0, 0.0, 0.0)] * num_frame
for frame_i in range(num_frame):
bvh_loc = bvh_node.anim_data[frame_i + skip_frame][:3]
bone_translate_matrix = Matrix.Translation(
Vector(bvh_loc) - bvh_node.rest_head_local)
location[frame_i] = (bone_rest_matrix_inv @
bone_translate_matrix).to_translation()
for axis_i in range(3):
curve = action.fcurves.new(data_path=data_path, index=axis_i, action_group=bvh_node.name)
keyframe_points = curve.keyframe_points
keyframe_points.add(num_frame)
for frame_i in range(num_frame):
keyframe_points[frame_i].co = (
time[frame_i],
location[frame_i][axis_i],
)
if bvh_node.has_rot:
data_path = None
rotate = None
if 'QUATERNION' == rotate_mode:
rotate = [(1.0, 0.0, 0.0, 0.0)] * num_frame
data_path = f'pose.bones["{pose_bone.name}"].rotation_quaternion'
else:
rotate = [(0.0, 0.0, 0.0)] * num_frame
data_path = f'pose.bones["{pose_bone.name}"].rotation_euler'
prev_euler = Euler((0.0, 0.0, 0.0))
for frame_i in range(num_frame):
bvh_rot = bvh_node.anim_data[frame_i + skip_frame][3:]
euler = Euler(bvh_rot, bvh_node.rot_order_str[::-1])
bone_rotation_matrix = euler.to_matrix().to_4x4()
bone_rotation_matrix = (
bone_rest_matrix_inv @
bone_rotation_matrix @
bone_rest_matrix
)
if len(rotate[frame_i]) == 4:
rotate[frame_i] = bone_rotation_matrix.to_quaternion()
else:
rotate[frame_i] = bone_rotation_matrix.to_euler(
pose_bone.rotation_mode, prev_euler)
prev_euler = rotate[frame_i]
for axis_i in range(len(rotate[0])):
curve = action.fcurves.new(data_path=data_path, index=axis_i, action_group=bvh_node.name)
keyframe_points = curve.keyframe_points
keyframe_points.add(num_frame)
for frame_i in range(num_frame):
keyframe_points[frame_i].co = (
time[frame_i],
rotate[frame_i][axis_i],
)
for cu in action.fcurves:
if IMPORT_LOOP:
pass
for bez in cu.keyframe_points:
bez.interpolation = 'LINEAR'
try:
arm_ob.matrix_world = global_matrix
except:
pass
bpy.ops.object.transform_apply(location=False, rotation=True, scale=False)
return arm_ob
def load(
context,
bvh_str,
*,
target='ARMATURE',
rotate_mode='NATIVE',
global_scale=1.0,
use_cyclic=False,
frame_start=1,
global_matrix=None,
use_fps_scale=False,
update_scene_fps=False,
update_scene_duration=False,
original_rest_pose=None,
bvh_name='synsized', # Added parameter
report=print,
):
import time
t1 = time.time()
bvh_nodes, bvh_frame_time, bvh_frame_count = read_bvh(
context, bvh_str,
rotate_mode=rotate_mode,
global_scale=global_scale,
)
print("%.4f" % (time.time() - t1))
scene = context.scene
frame_orig = scene.frame_current
if bvh_frame_time is None:
report(
{'WARNING'},
"The BVH file does not contain frame duration in its MOTION "
"section, assuming the BVH and Blender scene have the same "
"frame rate"
)
bvh_frame_time = scene.render.fps_base / scene.render.fps
use_fps_scale = False
if update_scene_fps:
_update_scene_fps(context, report, bvh_frame_time)
use_fps_scale = False
if update_scene_duration:
_update_scene_duration(context, report, bvh_frame_count, bvh_frame_time, frame_start, use_fps_scale)
t1 = time.time()
print("\timporting to blender...", end="")
if target == 'ARMATURE':
bvh_node_dict2armature(
context, bvh_name, bvh_nodes, bvh_frame_time,
rotate_mode=rotate_mode,
frame_start=frame_start,
IMPORT_LOOP=use_cyclic,
global_matrix=global_matrix,
use_fps_scale=use_fps_scale,
original_rest_pose=original_rest_pose
)
elif target == 'OBJECT':
bvh_node_dict2objects(
context, bvh_name, bvh_nodes,
rotate_mode=rotate_mode,
frame_start=frame_start,
IMPORT_LOOP=use_cyclic,
)
else:
report({'ERROR'}, tip_("Invalid target %r (must be 'ARMATURE' or 'OBJECT')") % target)
return {'CANCELLED'}
print('Done in %.4f\n' % (time.time() - t1))
context.scene.frame_set(frame_orig)
return {'FINISHED'}
def _update_scene_fps(context, report, bvh_frame_time):
"""Update the scene's FPS settings from the BVH, but only if the BVH contains enough info."""
# Broken BVH handling: prevent division by zero.
if bvh_frame_time == 0.0:
report(
{'WARNING'},
"Unable to update scene frame rate, as the BVH file "
"contains a zero frame duration in its MOTION section",
)
return
scene = context.scene
scene_fps = scene.render.fps / scene.render.fps_base
new_fps = 1.0 / bvh_frame_time
if scene.render.fps != new_fps or scene.render.fps_base != 1.0:
print("\tupdating scene FPS (was %f) to BVH FPS (%f)" % (scene_fps, new_fps))
scene.render.fps = int(round(new_fps))
scene.render.fps_base = scene.render.fps / new_fps
def _update_scene_duration(
context, report, bvh_frame_count, bvh_frame_time, frame_start,
use_fps_scale):
"""Extend the scene's duration so that the BVH file fits in its entirety."""
if bvh_frame_count is None:
report(
{'WARNING'},
"Unable to extend the scene duration, as the BVH file does not "
"contain the number of frames in its MOTION section",
)
return
# Not likely, but it can happen when a BVH is just used to store an armature.
if bvh_frame_count == 0:
return
if use_fps_scale:
scene_fps = context.scene.render.fps / context.scene.render.fps_base
scaled_frame_count = int(ceil(bvh_frame_count * bvh_frame_time * scene_fps))
bvh_last_frame = frame_start + scaled_frame_count
else:
bvh_last_frame = frame_start + bvh_frame_count
# Only extend the scene, never shorten it.
if context.scene.frame_end < bvh_last_frame:
context.scene.frame_end = bvh_last_frame
# This function is from
# https://github.com/yuki-koyama/blender-cli-rendering
def set_smooth_shading(mesh: bpy.types.Mesh) -> None:
for polygon in mesh.polygons:
polygon.use_smooth = True
# This function is from
# https://github.com/yuki-koyama/blender-cli-rendering
def create_mesh_from_pydata(scene: bpy.types.Scene,
vertices: Iterable[Iterable[float]],
faces: Iterable[Iterable[int]],
mesh_name: str,
object_name: str,
use_smooth: bool = True) -> bpy.types.Object:
# Add a new mesh and set vertices and faces
# Note: In this case, it does not require to set edges.
# Note: After manipulating mesh data, update() needs to be called.
new_mesh: bpy.types.Mesh = bpy.data.meshes.new(mesh_name)
new_mesh.from_pydata(vertices, [], faces)
new_mesh.update()
if use_smooth:
set_smooth_shading(new_mesh)
new_object: bpy.types.Object = bpy.data.objects.new(object_name, new_mesh)
scene.collection.objects.link(new_object)
return new_object
# This function is from
# https://github.com/yuki-koyama/blender-cli-rendering
def add_subdivision_surface_modifier(mesh_object: bpy.types.Object, level: int, is_simple: bool = False) -> None:
'''
https://docs.blender.org/api/current/bpy.types.SubsurfModifier.html
'''
modifier: bpy.types.SubsurfModifier = mesh_object.modifiers.new(name="Subsurf", type='SUBSURF')
modifier.levels = level
modifier.render_levels = level
modifier.subdivision_type = 'SIMPLE' if is_simple else 'CATMULL_CLARK'
# This function is from
# https://github.com/yuki-koyama/blender-cli-rendering
def create_armature_mesh(scene: bpy.types.Scene, armature_object: bpy.types.Object, mesh_name: str) -> bpy.types.Object:
assert armature_object.type == 'ARMATURE', 'Error'
assert len(armature_object.data.bones) != 0, 'Error'
def add_rigid_vertex_group(target_object: bpy.types.Object, name: str, vertex_indices: Iterable[int]) -> None:
new_vertex_group = target_object.vertex_groups.new(name=name)
for vertex_index in vertex_indices:
new_vertex_group.add([vertex_index], 1.0, 'REPLACE')
def generate_bone_mesh_pydata(radius: float, length: float) -> Tuple[List[mathutils.Vector], List[List[int]]]:
base_radius = radius
top_radius = 0.5 * radius
vertices = [
# Cross section of the base part
mathutils.Vector((-base_radius, 0.0, +base_radius)),
mathutils.Vector((+base_radius, 0.0, +base_radius)),
mathutils.Vector((+base_radius, 0.0, -base_radius)),
mathutils.Vector((-base_radius, 0.0, -base_radius)),
# Cross section of the top part
mathutils.Vector((-top_radius, length, +top_radius)),
mathutils.Vector((+top_radius, length, +top_radius)),
mathutils.Vector((+top_radius, length, -top_radius)),
mathutils.Vector((-top_radius, length, -top_radius)),
# End points
mathutils.Vector((0.0, -base_radius, 0.0)),
mathutils.Vector((0.0, length + top_radius, 0.0))
]
faces = [
# End point for the base part
[8, 1, 0],
[8, 2, 1],
[8, 3, 2],
[8, 0, 3],
# End point for the top part
[9, 4, 5],
[9, 5, 6],
[9, 6, 7],
[9, 7, 4],
# Side faces
[0, 1, 5, 4],
[1, 2, 6, 5],
[2, 3, 7, 6],
[3, 0, 4, 7],
]
return vertices, faces
armature_data: bpy.types.Armature = armature_object.data
vertices: List[mathutils.Vector] = []
faces: List[List[int]] = []
vertex_groups: List[Dict[str, Any]] = []
for bone in armature_data.bones:
radius = 0.10 * (0.10 + bone.length)
temp_vertices, temp_faces = generate_bone_mesh_pydata(radius, bone.length)
vertex_index_offset = len(vertices)
temp_vertex_group = {'name': bone.name, 'vertex_indices': []}
for local_index, vertex in enumerate(temp_vertices):
vertices.append(bone.matrix_local @ vertex)
temp_vertex_group['vertex_indices'].append(local_index + vertex_index_offset)
vertex_groups.append(temp_vertex_group)
for face in temp_faces:
if len(face) == 3:
faces.append([
face[0] + vertex_index_offset,
face[1] + vertex_index_offset,
face[2] + vertex_index_offset,
])
else:
faces.append([
face[0] + vertex_index_offset,
face[1] + vertex_index_offset,
face[2] + vertex_index_offset,
face[3] + vertex_index_offset,
])
new_object = create_mesh_from_pydata(scene, vertices, faces, mesh_name, mesh_name)
new_object.matrix_world = armature_object.matrix_world
for vertex_group in vertex_groups:
add_rigid_vertex_group(new_object, vertex_group['name'], vertex_group['vertex_indices'])
armature_modifier = new_object.modifiers.new('Armature', 'ARMATURE')
armature_modifier.object = armature_object
armature_modifier.use_vertex_groups = True
add_subdivision_surface_modifier(new_object, 1, is_simple=True)
add_subdivision_surface_modifier(new_object, 2, is_simple=False)
# Set the armature as the parent of the new object
bpy.ops.object.select_all(action='DESELECT')
new_object.select_set(True)
armature_object.select_set(True)
bpy.context.view_layer.objects.active = armature_object
bpy.ops.object.parent_set(type='OBJECT')
return new_object
class OP_AddMesh(bpy.types.Operator):
bl_idname = "genmm.add_mesh"
bl_label = "Add mesh"
bl_description = ""
bl_options = {"REGISTER", "UNDO"}
def __init__(self) -> None:
super().__init__()
def execute(self, context: bpy.types.Context):
name = bpy.context.object.name + "_proxy"
create_armature_mesh(bpy.context.scene, bpy.context.object, name)
return {'FINISHED'}
class OP_RunSynthesis(bpy.types.Operator):
bl_idname = "genmm.run_synthesis"
bl_label = "Run synthesis"
bl_description = ""
bl_options = {"REGISTER", "UNDO"}
def execute(self, context: bpy.types.Context):
setting = context.scene.setting
original_armature = context.object
rest_pose_data = capture_rest_pose(original_armature)
anim = original_armature.animation_data.action
start_frame, end_frame = map(int, anim.frame_range)
start_frame = start_frame if setting.start_frame == -1 else setting.start_frame
end_frame = end_frame if setting.end_frame == -1 else setting.end_frame
bvh_str = get_bvh_data(context,
frame_start=start_frame,
frame_end=end_frame)
frames_str, frame_time_str = bvh_str.split('MOTION\n')[1].split('\n')[:2]
motion_data_str = bvh_str.split('MOTION\n')[1].split('\n')[2:-1]
motion_data = np.array([item.strip().split(' ') for item in motion_data_str], dtype=np.float32)
model = GenMM(device='cuda' if torch.cuda.is_available() else 'cpu', silent=True)
criteria = PatchCoherentLoss(patch_size=setting.patch_size,
alpha=setting.alpha,
loop=setting.loop, cache=True)
for i in range(setting.num_output):
print(f"Generating motion {i+1} of {setting.num_output}")
# Create a new BlenderMotion instance for each iteration
motion = [BlenderMotion(motion_data.copy(), repr='repr6d', use_velo=True,
keep_up_pos=True, up_axis=setting.up_axis, padding_last=False)]
syn = model.run(motion, criteria,
num_frames=str(setting.num_syn_frames),
num_steps=setting.num_steps,
noise_sigma=setting.noise,
patch_size=setting.patch_size,
coarse_ratio=f'{setting.coarse_ratio}x_nframes',
pyr_factor=setting.pyr_factor)
motion_data_str = [' '.join(str(x) for x in item) for item in motion[0].parse(syn)]
bvh_name = f"synsized_{i+1}"
load(context,
bvh_str.split('MOTION\n')[0].split('\n') + ['MOTION'] + [frames_str] + [frame_time_str] + motion_data_str,
rotate_mode='QUATERNION',
global_matrix=original_armature.matrix_world,
original_rest_pose=rest_pose_data,
target='ARMATURE',
use_fps_scale=False,
bvh_name=bvh_name)
return {'FINISHED'}
class GENMM_PT_ControlPanel(bpy.types.Panel):
bl_label = "GenMM"
bl_space_type = 'VIEW_3D'
bl_region_type = 'UI'
bl_category = "GenMM"
@classmethod
def poll(cls, context: bpy.types.Context):
return True
def draw_header(self, context: bpy.types.Context):
layout = self.layout
layout.label(text="", icon='PLUGIN')
def draw(self, context: bpy.types.Context):
layout = self.layout
scene = bpy.context.scene
ops: List[bpy.types.Operator] = [
OP_AddMesh,
]
for op in ops:
layout.operator(op.bl_idname, text=op.bl_label)
box = layout.box()
box.label(text="Exemplar config:")
exemplar_row = box.row()
exemplar_row.prop(scene.setting, "start_frame")
exemplar_row.prop(scene.setting, "end_frame")
exemplar_row = box.row()
exemplar_row.prop(scene.setting, "up_axis")
box = layout.box()
box.label(text="Synthesis config:")
box.prop(scene.setting, "loop")
box.prop(scene.setting, "noise")
box.prop(scene.setting, "num_syn_frames")
box.prop(scene.setting, "patch_size")
box.prop(scene.setting, "coarse_ratio")
box.prop(scene.setting, "pyr_factor")
box.prop(scene.setting, "alpha")
box.prop(scene.setting, "num_steps")
box.prop(scene.setting, "num_output") # New parameter
ops: List[bpy.types.Operator] = [
OP_RunSynthesis,
]
for op in ops:
layout.operator(op.bl_idname, text=op.bl_label)
class PropertyGroup(bpy.types.PropertyGroup):
'''Property container for options and paths of GenMM'''
start_frame: bpy.props.IntProperty(
name="Start Frame",
description="Start Frame of the Exemplar Motion.",
default=1)
end_frame: bpy.props.IntProperty(
name="End Frame",
description="End Frame of the Exemplar Motion.",
default=-1)
up_axis: bpy.props.EnumProperty(
name="Up Axis",
default='Z_UP',
description="Up axis of the Exemplar Motion",
items=[('Z_UP', "Z-Up", 'Z Up'),
('Y_UP', "Y-Up", 'Y Up'),
('X_UP', "X-Up", 'X Up'),
]
)
noise: bpy.props.FloatProperty(
name="Noise Intensity",
description="Intensity of Noise Added to the Synthesized Motion.",
default=10)
num_syn_frames: bpy.props.IntProperty(
name="Num. of Frames",
description="Number of the Synthesized Motion.",
default=600)
patch_size: bpy.props.IntProperty(
name="Patch Size",
description="Size for Patch Extraction.",
min=7,
default=15)
coarse_ratio: bpy.props.FloatProperty(
name="Coarse Ratio",
description="Ratio of the Coarest Pyramid.",
min=0.0,
default=0.2)
pyr_factor: bpy.props.FloatProperty(
name="Pyramid Factor",
description="Pyramid Downsample Factor.",
min=0.1,
default=0.75)
alpha: bpy.props.FloatProperty(
name="Completeness Alpha",
description="Alpha Value for Completeness/Diversity Trade-off.",
default=0.05)
loop: bpy.props.BoolProperty(
name="Endless Loop",
description="Whether to Use Loop Constrain.",
default=False)
num_steps: bpy.props.IntProperty(
name="Num of Steps",
description="Number of Optimized Steps.",
default=5)
num_output: bpy.props.IntProperty(
name="Num. of Output",
description="Number of different motions to generate.",
min=1,
default=1)
classes = [
OP_AddMesh,
OP_RunSynthesis,
GENMM_PT_ControlPanel,
]
def register():
bpy.utils.register_class(PropertyGroup)
bpy.types.Scene.setting = bpy.props.PointerProperty(type=PropertyGroup)
for cls in classes:
bpy.utils.register_class(cls)
def unregister():
bpy.utils.unregister_class(PropertyGroup)
for cls in classes:
bpy.utils.unregister_class(cls)
if __name__ == "__main__":
register()
================================================
FILE: configs/default.yaml
================================================
# motion data config
repr: 'repr6d'
skeleton_name: null
use_velo: true
keep_up_pos: true
up_axis: 'Y_UP'
padding_last: false
requires_contact: false
joint_reduction: false
skeleton_aware: false
joints_group: null
# generate parameters
num_frames: '2x_nframes'
alpha: 0.01
num_steps: 3
noise_sigma: 10.0
coarse_ratio: '5x_patchsize'
# coarse_ratio: '0.2x_nframes'
pyr_factor: 0.75
num_stages_limit: -1
patch_size: 11
loop: false
================================================
FILE: configs/ganimator.yaml
================================================
################################################################
# This configuration uses the same input format of GANimmator for generation
################################################################
outout_dir: './output/ganimator_format'
# for GANimator BVH data
repr: 'repr6d'
skeleton_name: 'mixamo'
use_velo: true
keep_up_pos: true
up_axis: 'Y_UP'
padding_last: true
requires_contact: true
joint_reduction: true
skeleton_aware: false
joints_group: null
# generate parameters
num_frames: '2x_nframes'
alpha: 0.01
num_steps: 3
noise_sigma: 10.0
coarse_ratio: '3x_patchsize'
# coarse_ratio: '0.1x_nframes'
pyr_factor: 0.75
num_stages_limit: -1
patch_size: 11
loop: false
================================================
FILE: dataset/blender_motion.py
================================================
import os
import os.path as osp
import torch
import numpy as np
import torch.nn.functional as F
from .motion import MotionData
from utils.transforms import quat2repr6d, euler2mat, mat2quat, repr6d2quat, quat2euler
class BlenderMotion:
def __init__(self, motion_data, repr='quat', use_velo=True, keep_up_pos=True, up_axis=None, padding_last=False):
'''
BVHMotion constructor
Args:
motion_data : np.array, bvh format data to load from
repr : string, rotation representation, support ['quat', 'repr6d', 'euler']
use_velo : book, whether to transform the joints positions to velocities
keep_up_pos : bool, whether to keep y position when converting to velocity
up_axis : string, up axis of the motion data
padding_last : bool, whether to pad the last position
requires_contact : bool, whether to concatenate contact information
'''
self.motion_data = motion_data
def to_tensor(motion_data, repr='euler', rot_only=False):
if repr not in ['euler', 'quat', 'quaternion', 'repr6d']:
raise Exception('Unknown rotation representation')
if repr == 'quaternion' or repr == 'quat' or repr == 'repr6d': # default is euler for blender data
rotations = torch.tensor(motion_data[:, 3:], dtype=torch.float).view(motion_data.shape[0], -1, 3)
if repr == 'quat':
rotations = euler2mat(rotations)
rotations = mat2quat(rotations)
if repr == 'repr6d':
rotations = euler2mat(rotations)
rotations = mat2quat(rotations)
rotations = quat2repr6d(rotations)
positions = torch.tensor(motion_data[:, :3], dtype=torch.float32)
if rot_only:
return rotations.reshape(rotations.shape[0], -1)
rotations = rotations.reshape(rotations.shape[0], -1)
return torch.cat((rotations, positions), dim=-1)
self.motion_data = MotionData(to_tensor(motion_data, repr=repr).permute(1, 0).unsqueeze(0), repr=repr, use_velo=use_velo,
keep_up_pos=keep_up_pos, up_axis=up_axis, padding_last=padding_last, contact_id=None)
@property
def repr(self):
return self.motion_data.repr
@property
def use_velo(self):
return self.motion_data.use_velo
@property
def keep_up_pos(self):
return self.motion_data.keep_up_pos
@property
def padding_last(self):
return self.motion_data.padding_last
@property
def concat_id(self):
return self.motion_data.contact_id
@property
def n_pad(self):
return self.motion_data.n_pad
@property
def n_contact(self):
return self.motion_data.n_contact
@property
def n_rot(self):
return self.motion_data.n_rot
def sample(self, size=None, slerp=False):
'''
Sample motion data, support slerp
'''
return self.motion_data.sample(size, slerp)
def parse(self, motion, keep_velo=False,):
"""
No batch support here!!!
:returns tracks_json
"""
motion = motion.clone()
if self.use_velo and not keep_velo:
motion = self.motion_data.to_position(motion)
if self.n_pad:
motion = motion[:, :-self.n_pad]
motion = motion.squeeze().permute(1, 0)
pos = motion[..., -3:]
rot = motion[..., :-3].reshape(motion.shape[0], -1, self.n_rot)
if self.repr == 'quat':
rot = quat2euler(rot)
elif self.repr == 'repr6d':
rot = repr6d2quat(rot)
rot = quat2euler(rot)
return torch.cat([pos, rot.view(motion.shape[0], -1)], dim=-1).cpu().numpy()
================================================
FILE: dataset/bvh/Quaternions.py
================================================
"""
This code is modified from:
http://theorangeduck.com/page/deep-learning-framework-character-motion-synthesis-and-editing
by Daniel Holden et al
"""
import numpy as np
class Quaternions:
"""
Quaternions is a wrapper around a numpy ndarray
that allows it to act as if it were an narray of
a quater data type.
Therefore addition, subtraction, multiplication,
division, negation, absolute, are all defined
in terms of quater operations such as quater
multiplication.
This allows for much neater code and many routines
which conceptually do the same thing to be written
in the same way for point data and for rotation data.
The Quaternions class has been desgined such that it
should support broadcasting and slicing in all of the
usual ways.
"""
def __init__(self, qs):
if isinstance(qs, np.ndarray):
if len(qs.shape) == 1: qs = np.array([qs])
self.qs = qs
return
if isinstance(qs, Quaternions):
self.qs = qs
return
raise TypeError('Quaternions must be constructed from iterable, numpy array, or Quaternions, not %s' % type(qs))
def __str__(self): return "Quaternions("+ str(self.qs) + ")"
def __repr__(self): return "Quaternions("+ repr(self.qs) + ")"
""" Helper Methods for Broadcasting and Data extraction """
@classmethod
def _broadcast(cls, sqs, oqs, scalar=False):
if isinstance(oqs, float): return sqs, oqs * np.ones(sqs.shape[:-1])
ss = np.array(sqs.shape) if not scalar else np.array(sqs.shape[:-1])
os = np.array(oqs.shape)
if len(ss) != len(os):
raise TypeError('Quaternions cannot broadcast together shapes %s and %s' % (sqs.shape, oqs.shape))
if np.all(ss == os): return sqs, oqs
if not np.all((ss == os) | (os == np.ones(len(os))) | (ss == np.ones(len(ss)))):
raise TypeError('Quaternions cannot broadcast together shapes %s and %s' % (sqs.shape, oqs.shape))
sqsn, oqsn = sqs.copy(), oqs.copy()
for a in np.where(ss == 1)[0]: sqsn = sqsn.repeat(os[a], axis=a)
for a in np.where(os == 1)[0]: oqsn = oqsn.repeat(ss[a], axis=a)
return sqsn, oqsn
""" Adding Quaterions is just Defined as Multiplication """
def __add__(self, other): return self * other
def __sub__(self, other): return self / other
""" Quaterion Multiplication """
def __mul__(self, other):
"""
Quaternion multiplication has three main methods.
When multiplying a Quaternions array by Quaternions
normal quater multiplication is performed.
When multiplying a Quaternions array by a vector
array of the same shape, where the last axis is 3,
it is assumed to be a Quaternion by 3D-Vector
multiplication and the 3D-Vectors are rotated
in space by the Quaternions.
When multipplying a Quaternions array by a scalar
or vector of different shape it is assumed to be
a Quaternions by Scalars multiplication and the
Quaternions are scaled using Slerp and the identity
quaternions.
"""
""" If Quaternions type do Quaternions * Quaternions """
if isinstance(other, Quaternions):
sqs, oqs = Quaternions._broadcast(self.qs, other.qs)
q0 = sqs[...,0]; q1 = sqs[...,1];
q2 = sqs[...,2]; q3 = sqs[...,3];
r0 = oqs[...,0]; r1 = oqs[...,1];
r2 = oqs[...,2]; r3 = oqs[...,3];
qs = np.empty(sqs.shape)
qs[...,0] = r0 * q0 - r1 * q1 - r2 * q2 - r3 * q3
qs[...,1] = r0 * q1 + r1 * q0 - r2 * q3 + r3 * q2
qs[...,2] = r0 * q2 + r1 * q3 + r2 * q0 - r3 * q1
qs[...,3] = r0 * q3 - r1 * q2 + r2 * q1 + r3 * q0
return Quaternions(qs)
""" If array type do Quaternions * Vectors """
if isinstance(other, np.ndarray) and other.shape[-1] == 3:
vs = Quaternions(np.concatenate([np.zeros(other.shape[:-1] + (1,)), other], axis=-1))
return (self * (vs * -self)).imaginaries
""" If float do Quaternions * Scalars """
if isinstance(other, np.ndarray) or isinstance(other, float):
return Quaternions.slerp(Quaternions.id_like(self), self, other)
raise TypeError('Cannot multiply/add Quaternions with type %s' % str(type(other)))
def __div__(self, other):
"""
When a Quaternion type is supplied, division is defined
as multiplication by the inverse of that Quaternion.
When a scalar or vector is supplied it is defined
as multiplicaion of one over the supplied value.
Essentially a scaling.
"""
if isinstance(other, Quaternions): return self * (-other)
if isinstance(other, np.ndarray): return self * (1.0 / other)
if isinstance(other, float): return self * (1.0 / other)
raise TypeError('Cannot divide/subtract Quaternions with type %s' + str(type(other)))
def __eq__(self, other): return self.qs == other.qs
def __ne__(self, other): return self.qs != other.qs
def __neg__(self):
""" Invert Quaternions """
return Quaternions(self.qs * np.array([[1, -1, -1, -1]]))
def __abs__(self):
""" Unify Quaternions To Single Pole """
qabs = self.normalized().copy()
top = np.sum(( qabs.qs) * np.array([1,0,0,0]), axis=-1)
bot = np.sum((-qabs.qs) * np.array([1,0,0,0]), axis=-1)
qabs.qs[top < bot] = -qabs.qs[top < bot]
return qabs
def __iter__(self): return iter(self.qs)
def __len__(self): return len(self.qs)
def __getitem__(self, k): return Quaternions(self.qs[k])
def __setitem__(self, k, v): self.qs[k] = v.qs
@property
def lengths(self):
return np.sum(self.qs**2.0, axis=-1)**0.5
@property
def reals(self):
return self.qs[...,0]
@property
def imaginaries(self):
return self.qs[...,1:4]
@property
def shape(self): return self.qs.shape[:-1]
def repeat(self, n, **kwargs):
return Quaternions(self.qs.repeat(n, **kwargs))
def normalized(self):
return Quaternions(self.qs / self.lengths[...,np.newaxis])
def log(self):
norm = abs(self.normalized())
imgs = norm.imaginaries
lens = np.sqrt(np.sum(imgs**2, axis=-1))
lens = np.arctan2(lens, norm.reals) / (lens + 1e-10)
return imgs * lens[...,np.newaxis]
def constrained(self, axis):
rl = self.reals
im = np.sum(axis * self.imaginaries, axis=-1)
t1 = -2 * np.arctan2(rl, im) + np.pi
t2 = -2 * np.arctan2(rl, im) - np.pi
top = Quaternions.exp(axis[np.newaxis] * (t1[:,np.newaxis] / 2.0))
bot = Quaternions.exp(axis[np.newaxis] * (t2[:,np.newaxis] / 2.0))
img = self.dot(top) > self.dot(bot)
ret = top.copy()
ret[ img] = top[ img]
ret[~img] = bot[~img]
return ret
def constrained_x(self): return self.constrained(np.array([1,0,0]))
def constrained_y(self): return self.constrained(np.array([0,1,0]))
def constrained_z(self): return self.constrained(np.array([0,0,1]))
def dot(self, q): return np.sum(self.qs * q.qs, axis=-1)
def copy(self): return Quaternions(np.copy(self.qs))
def reshape(self, s):
self.qs.reshape(s)
return self
def interpolate(self, ws):
return Quaternions.exp(np.average(abs(self).log, axis=0, weights=ws))
def euler(self, order='xyz'):
q = self.normalized().qs
q0 = q[...,0]
q1 = q[...,1]
q2 = q[...,2]
q3 = q[...,3]
es = np.zeros(self.shape + (3,))
# These version is wrong on converting
'''
if order == 'xyz':
es[...,0] = np.arctan2(2 * (q0 * q1 + q2 * q3), 1 - 2 * (q1 * q1 + q2 * q2))
es[...,1] = np.arcsin((2 * (q0 * q2 - q3 * q1)).clip(-1,1))
es[...,2] = np.arctan2(2 * (q0 * q3 + q1 * q2), 1 - 2 * (q2 * q2 + q3 * q3))
elif order == 'yzx':
es[...,0] = np.arctan2(2 * (q1 * q0 - q2 * q3), -q1 * q1 + q2 * q2 - q3 * q3 + q0 * q0)
es[...,1] = np.arctan2(2 * (q2 * q0 - q1 * q3), q1 * q1 - q2 * q2 - q3 * q3 + q0 * q0)
es[...,2] = np.arcsin((2 * (q1 * q2 + q3 * q0)).clip(-1,1))
else:
raise NotImplementedError('Cannot convert from ordering %s' % order)
'''
if order == 'xyz':
es[..., 2] = np.arctan2(2 * (q0 * q3 - q1 * q2), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3)
es[..., 1] = np.arcsin((2 * (q1 * q3 + q0 * q2)).clip(-1,1))
es[..., 0] = np.arctan2(2 * (q0 * q1 - q2 * q3), q0 * q0 - q1 * q1 - q2 * q2 + q3 * q3)
else:
raise NotImplementedError('Cannot convert from ordering %s' % order)
# These conversion don't appear to work correctly for Maya.
# http://bediyap.com/programming/convert-quaternion-to-euler-rotations/
'''
if order == 'xyz':
es[..., 0] = np.arctan2(2 * (q0 * q3 - q1 * q2), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3)
es[..., 1] = np.arcsin((2 * (q1 * q3 + q0 * q2)).clip(-1,1))
es[..., 2] = np.arctan2(2 * (q0 * q1 - q2 * q3), q0 * q0 - q1 * q1 - q2 * q2 + q3 * q3)
elif order == 'yzx':
es[fa + (0,)] = np.arctan2(2 * (q0 * q1 - q2 * q3), q0 * q0 - q1 * q1 + q2 * q2 - q3 * q3)
es[fa + (1,)] = np.arcsin((2 * (q1 * q2 + q0 * q3)).clip(-1,1))
es[fa + (2,)] = np.arctan2(2 * (q0 * q2 - q1 * q3), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3)
elif order == 'zxy':
es[fa + (0,)] = np.arctan2(2 * (q0 * q2 - q1 * q3), q0 * q0 - q1 * q1 - q2 * q2 + q3 * q3)
es[fa + (1,)] = np.arcsin((2 * (q0 * q1 + q2 * q3)).clip(-1,1))
es[fa + (2,)] = np.arctan2(2 * (q0 * q3 - q1 * q2), q0 * q0 - q1 * q1 + q2 * q2 - q3 * q3)
elif order == 'xzy':
es[fa + (0,)] = np.arctan2(2 * (q0 * q2 + q1 * q3), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3)
es[fa + (1,)] = np.arcsin((2 * (q0 * q3 - q1 * q2)).clip(-1,1))
es[fa + (2,)] = np.arctan2(2 * (q0 * q1 + q2 * q3), q0 * q0 - q1 * q1 + q2 * q2 - q3 * q3)
elif order == 'yxz':
es[fa + (0,)] = np.arctan2(2 * (q1 * q2 + q0 * q3), q0 * q0 - q1 * q1 + q2 * q2 - q3 * q3)
es[fa + (1,)] = np.arcsin((2 * (q0 * q1 - q2 * q3)).clip(-1,1))
es[fa + (2,)] = np.arctan2(2 * (q1 * q3 + q0 * q2), q0 * q0 - q1 * q1 - q2 * q2 + q3 * q3)
elif order == 'zyx':
es[fa + (0,)] = np.arctan2(2 * (q0 * q1 + q2 * q3), q0 * q0 - q1 * q1 - q2 * q2 + q3 * q3)
es[fa + (1,)] = np.arcsin((2 * (q0 * q2 - q1 * q3)).clip(-1,1))
es[fa + (2,)] = np.arctan2(2 * (q0 * q3 + q1 * q2), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3)
else:
raise KeyError('Unknown ordering %s' % order)
'''
# https://github.com/ehsan/ogre/blob/master/OgreMain/src/OgreMatrix3.cpp
# Use this class and convert from matrix
return es
def average(self):
if len(self.shape) == 1:
import numpy.core.umath_tests as ut
system = ut.matrix_multiply(self.qs[:,:,np.newaxis], self.qs[:,np.newaxis,:]).sum(axis=0)
w, v = np.linalg.eigh(system)
qiT_dot_qref = (self.qs[:,:,np.newaxis] * v[np.newaxis,:,:]).sum(axis=1)
return Quaternions(v[:,np.argmin((1.-qiT_dot_qref**2).sum(axis=0))])
else:
raise NotImplementedError('Cannot average multi-dimensionsal Quaternions')
def angle_axis(self):
norm = self.normalized()
s = np.sqrt(1 - (norm.reals**2.0))
s[s == 0] = 0.001
angles = 2.0 * np.arccos(norm.reals)
axis = norm.imaginaries / s[...,np.newaxis]
return angles, axis
def transforms(self):
qw = self.qs[...,0]
qx = self.qs[...,1]
qy = self.qs[...,2]
qz = self.qs[...,3]
x2 = qx + qx; y2 = qy + qy; z2 = qz + qz;
xx = qx * x2; yy = qy * y2; wx = qw * x2;
xy = qx * y2; yz = qy * z2; wy = qw * y2;
xz = qx * z2; zz = qz * z2; wz = qw * z2;
m = np.empty(self.shape + (3,3))
m[...,0,0] = 1.0 - (yy + zz)
m[...,0,1] = xy - wz
m[...,0,2] = xz + wy
m[...,1,0] = xy + wz
m[...,1,1] = 1.0 - (xx + zz)
m[...,1,2] = yz - wx
m[...,2,0] = xz - wy
m[...,2,1] = yz + wx
m[...,2,2] = 1.0 - (xx + yy)
return m
def ravel(self):
return self.qs.ravel()
@classmethod
def id(cls, n):
if isinstance(n, tuple):
qs = np.zeros(n + (4,))
qs[...,0] = 1.0
return Quaternions(qs)
if isinstance(n, int) or isinstance(n, long):
qs = np.zeros((n,4))
qs[:,0] = 1.0
return Quaternions(qs)
raise TypeError('Cannot Construct Quaternion from %s type' % str(type(n)))
@classmethod
def id_like(cls, a):
qs = np.zeros(a.shape + (4,))
qs[...,0] = 1.0
return Quaternions(qs)
@classmethod
def exp(cls, ws):
ts = np.sum(ws**2.0, axis=-1)**0.5
ts[ts == 0] = 0.001
ls = np.sin(ts) / ts
qs = np.empty(ws.shape[:-1] + (4,))
qs[...,0] = np.cos(ts)
qs[...,1] = ws[...,0] * ls
qs[...,2] = ws[...,1] * ls
qs[...,3] = ws[...,2] * ls
return Quaternions(qs).normalized()
@classmethod
def slerp(cls, q0s, q1s, a):
fst, snd = cls._broadcast(q0s.qs, q1s.qs)
fst, a = cls._broadcast(fst, a, scalar=True)
snd, a = cls._broadcast(snd, a, scalar=True)
len = np.sum(fst * snd, axis=-1)
neg = len < 0.0
len[neg] = -len[neg]
snd[neg] = -snd[neg]
amount0 = np.zeros(a.shape)
amount1 = np.zeros(a.shape)
linear = (1.0 - len) < 0.01
omegas = np.arccos(len[~linear])
sinoms = np.sin(omegas)
amount0[ linear] = 1.0 - a[linear]
amount1[ linear] = a[linear]
amount0[~linear] = np.sin((1.0 - a[~linear]) * omegas) / sinoms
amount1[~linear] = np.sin( a[~linear] * omegas) / sinoms
return Quaternions(
amount0[...,np.newaxis] * fst +
amount1[...,np.newaxis] * snd)
@classmethod
def between(cls, v0s, v1s):
a = np.cross(v0s, v1s)
w = np.sqrt((v0s**2).sum(axis=-1) * (v1s**2).sum(axis=-1)) + (v0s * v1s).sum(axis=-1)
return Quaternions(np.concatenate([w[...,np.newaxis], a], axis=-1)).normalized()
@classmethod
def from_angle_axis(cls, angles, axis):
axis = axis / (np.sqrt(np.sum(axis**2, axis=-1)) + 1e-10)[...,np.newaxis]
sines = np.sin(angles / 2.0)[...,np.newaxis]
cosines = np.cos(angles / 2.0)[...,np.newaxis]
return Quaternions(np.concatenate([cosines, axis * sines], axis=-1))
@classmethod
def from_euler(cls, es, order='xyz', world=False):
axis = {
'x' : np.array([1,0,0]),
'y' : np.array([0,1,0]),
'z' : np.array([0,0,1]),
}
q0s = Quaternions.from_angle_axis(es[...,0], axis[order[0]])
q1s = Quaternions.from_angle_axis(es[...,1], axis[order[1]])
q2s = Quaternions.from_angle_axis(es[...,2], axis[order[2]])
return (q2s * (q1s * q0s)) if world else (q0s * (q1s * q2s))
@classmethod
def from_transforms(cls, ts):
d0, d1, d2 = ts[...,0,0], ts[...,1,1], ts[...,2,2]
q0 = ( d0 + d1 + d2 + 1.0) / 4.0
q1 = ( d0 - d1 - d2 + 1.0) / 4.0
q2 = (-d0 + d1 - d2 + 1.0) / 4.0
q3 = (-d0 - d1 + d2 + 1.0) / 4.0
q0 = np.sqrt(q0.clip(0,None))
q1 = np.sqrt(q1.clip(0,None))
q2 = np.sqrt(q2.clip(0,None))
q3 = np.sqrt(q3.clip(0,None))
c0 = (q0 >= q1) & (q0 >= q2) & (q0 >= q3)
c1 = (q1 >= q0) & (q1 >= q2) & (q1 >= q3)
c2 = (q2 >= q0) & (q2 >= q1) & (q2 >= q3)
c3 = (q3 >= q0) & (q3 >= q1) & (q3 >= q2)
q1[c0] *= np.sign(ts[c0,2,1] - ts[c0,1,2])
q2[c0] *= np.sign(ts[c0,0,2] - ts[c0,2,0])
q3[c0] *= np.sign(ts[c0,1,0] - ts[c0,0,1])
q0[c1] *= np.sign(ts[c1,2,1] - ts[c1,1,2])
q2[c1] *= np.sign(ts[c1,1,0] + ts[c1,0,1])
q3[c1] *= np.sign(ts[c1,0,2] + ts[c1,2,0])
q0[c2] *= np.sign(ts[c2,0,2] - ts[c2,2,0])
q1[c2] *= np.sign(ts[c2,1,0] + ts[c2,0,1])
q3[c2] *= np.sign(ts[c2,2,1] + ts[c2,1,2])
q0[c3] *= np.sign(ts[c3,1,0] - ts[c3,0,1])
q1[c3] *= np.sign(ts[c3,2,0] + ts[c3,0,2])
q2[c3] *= np.sign(ts[c3,2,1] + ts[c3,1,2])
qs = np.empty(ts.shape[:-2] + (4,))
qs[...,0] = q0
qs[...,1] = q1
qs[...,2] = q2
qs[...,3] = q3
return cls(qs)
================================================
FILE: dataset/bvh/bvh_io.py
================================================
"""
This code is modified from:
http://theorangeduck.com/page/deep-learning-framework-character-motion-synthesis-and-editing
by Daniel Holden et al
"""
import re
import numpy as np
from dataset.bvh.Quaternions import Quaternions
channelmap = {
'Xrotation' : 'x',
'Yrotation' : 'y',
'Zrotation' : 'z'
}
channelmap_inv = {
'x': 'Xrotation',
'y': 'Yrotation',
'z': 'Zrotation',
}
ordermap = {
'x': 0,
'y': 1,
'z': 2,
}
class Animation:
def __init__(self, rotations, positions, orients, offsets, parents, names, frametime):
self.rotations = rotations
self.positions = positions
self.orients = orients
self.offsets = offsets
self.parent = parents
self.names = names
self.frametime = frametime
@property
def shape(self):
return self.rotations.shape
def load(filename, start=None, end=None, order=None, world=False, need_quater=False) -> Animation:
"""
Reads a BVH file and constructs an animation
Parameters
----------
filename: str
File to be opened
start : int
Optional Starting Frame
end : int
Optional Ending Frame
order : str
Optional Specifier for joint order.
Given as string E.G 'xyz', 'zxy'
world : bool
If set to true euler angles are applied
together in world space rather than local
space
Returns
-------
(animation, joint_names, frametime)
Tuple of loaded animation and joint names
"""
f = open(filename, "r")
i = 0
active = -1
end_site = False
names = []
orients = Quaternions.id(0)
offsets = np.array([]).reshape((0, 3))
parents = np.array([], dtype=int)
orders = []
for line in f:
if "HIERARCHY" in line: continue
if "MOTION" in line: continue
""" Modified line read to handle mixamo data """
# rmatch = re.match(r"ROOT (\w+)", line)
rmatch = re.match(r"ROOT (\w+:?\w+)", line)
if rmatch:
names.append(rmatch.group(1))
offsets = np.append(offsets, np.array([[0, 0, 0]]), axis=0)
orients.qs = np.append(orients.qs, np.array([[1, 0, 0, 0]]), axis=0)
parents = np.append(parents, active)
active = (len(parents) - 1)
continue
if "{" in line: continue
if "}" in line:
if end_site:
end_site = False
else:
active = parents[active]
continue
offmatch = re.match(r"\s*OFFSET\s+([\-\d\.e]+)\s+([\-\d\.e]+)\s+([\-\d\.e]+)", line)
if offmatch:
if not end_site:
offsets[active] = np.array([list(map(float, offmatch.groups()))])
continue
chanmatch = re.match(r"\s*CHANNELS\s+(\d+)", line)
if chanmatch:
channels = int(chanmatch.group(1))
channelis = 0 if channels == 3 else 3
channelie = 3 if channels == 3 else 6
parts = line.split()[2 + channelis:2 + channelie]
if any([p not in channelmap for p in parts]):
continue
order = "".join([channelmap[p] for p in parts])
orders.append(order)
continue
""" Modified line read to handle mixamo data """
# jmatch = re.match("\s*JOINT\s+(\w+)", line)
jmatch = re.match("\s*JOINT\s+(\w+:?\w+)", line)
if jmatch:
names.append(jmatch.group(1))
offsets = np.append(offsets, np.array([[0, 0, 0]]), axis=0)
orients.qs = np.append(orients.qs, np.array([[1, 0, 0, 0]]), axis=0)
parents = np.append(parents, active)
active = (len(parents) - 1)
continue
if "End Site" in line:
end_site = True
continue
fmatch = re.match("\s*Frames:\s+(\d+)", line)
if fmatch:
if start and end:
fnum = (end - start) - 1
else:
fnum = int(fmatch.group(1))
jnum = len(parents)
positions = offsets[np.newaxis].repeat(fnum, axis=0)
rotations = np.zeros((fnum, len(orients), 3))
continue
fmatch = re.match("\s*Frame Time:\s+([\d\.]+)", line)
if fmatch:
frametime = float(fmatch.group(1))
continue
if (start and end) and (i < start or i >= end - 1):
i += 1
continue
# dmatch = line.strip().split(' ')
dmatch = line.strip().split()
if dmatch:
data_block = np.array(list(map(float, dmatch)))
N = len(parents)
fi = i - start if start else i
if channels == 3:
positions[fi, 0:1] = data_block[0:3]
rotations[fi, :] = data_block[3:].reshape(N, 3)
elif channels == 6:
data_block = data_block.reshape(N, 6)
positions[fi, :] = data_block[:, 0:3]
rotations[fi, :] = data_block[:, 3:6]
elif channels == 9:
positions[fi, 0] = data_block[0:3]
data_block = data_block[3:].reshape(N - 1, 9)
rotations[fi, 1:] = data_block[:, 3:6]
positions[fi, 1:] += data_block[:, 0:3] * data_block[:, 6:9]
else:
raise Exception("Too many channels! %i" % channels)
i += 1
f.close()
all_rotations = []
canonical_order = 'xyz'
for i, order in enumerate(orders):
rot = rotations[:, i:i + 1]
if need_quater:
quat = Quaternions.from_euler(np.radians(rot), order=order, world=world)
all_rotations.append(quat)
continue
elif order != canonical_order:
quat = Quaternions.from_euler(np.radians(rot), order=order, world=world)
rot = np.degrees(quat.euler(order=canonical_order))
all_rotations.append(rot)
rotations = np.concatenate(all_rotations, axis=1)
return Animation(rotations, positions, orients, offsets, parents, names, frametime)
def save(filename, anim, names=None, frametime=1.0/24.0, order='zyx', positions=False, orients=True):
"""
Saves an Animation to file as BVH
Parameters
----------
filename: str
File to be saved to
anim : Animation
Animation to save
names : [str]
List of joint names
order : str
Optional Specifier for joint order.
Given as string E.G 'xyz', 'zxy'
frametime : float
Optional Animation Frame time
positions : bool
Optional specfier to save bone
positions for each frame
orients : bool
Multiply joint orients to the rotations
before saving.
"""
if names is None:
names = ["joint_" + str(i) for i in range(len(anim.parents))]
with open(filename, 'w') as f:
t = ""
f.write("%sHIERARCHY\n" % t)
f.write("%sROOT %s\n" % (t, names[0]))
f.write("%s{\n" % t)
t += '\t'
f.write("%sOFFSET %f %f %f\n" % (t, anim.offsets[0,0], anim.offsets[0,1], anim.offsets[0,2]) )
f.write("%sCHANNELS 6 Xposition Yposition Zposition %s %s %s \n" %
(t, channelmap_inv[order[0]], channelmap_inv[order[1]], channelmap_inv[order[2]]))
for i in range(anim.shape[1]):
if anim.parents[i] == 0:
t = save_joint(f, anim, names, t, i, order=order, positions=positions)
t = t[:-1]
f.write("%s}\n" % t)
f.write("MOTION\n")
f.write("Frames: %i\n" % anim.shape[0]);
f.write("Frame Time: %f\n" % frametime);
#if orients:
# rots = np.degrees((-anim.orients[np.newaxis] * anim.rotations).euler(order=order[::-1]))
#else:
# rots = np.degrees(anim.rotations.euler(order=order[::-1]))
rots = np.degrees(anim.rotations.euler(order=order[::-1]))
poss = anim.positions
for i in range(anim.shape[0]):
for j in range(anim.shape[1]):
if positions or j == 0:
f.write("%f %f %f %f %f %f " % (
poss[i,j,0], poss[i,j,1], poss[i,j,2],
rots[i,j,ordermap[order[0]]], rots[i,j,ordermap[order[1]]], rots[i,j,ordermap[order[2]]]))
else:
f.write("%f %f %f " % (
rots[i,j,ordermap[order[0]]], rots[i,j,ordermap[order[1]]], rots[i,j,ordermap[order[2]]]))
f.write("\n")
def save_joint(f, anim, names, t, i, order='zyx', positions=False):
f.write("%sJOINT %s\n" % (t, names[i]))
f.write("%s{\n" % t)
t += '\t'
f.write("%sOFFSET %f %f %f\n" % (t, anim.offsets[i,0], anim.offsets[i,1], anim.offsets[i,2]))
if positions:
f.write("%sCHANNELS 6 Xposition Yposition Zposition %s %s %s \n" % (t,
channelmap_inv[order[0]], channelmap_inv[order[1]], channelmap_inv[order[2]]))
else:
f.write("%sCHANNELS 3 %s %s %s\n" % (t,
channelmap_inv[order[0]], channelmap_inv[order[1]], channelmap_inv[order[2]]))
end_site = True
for j in range(anim.shape[1]):
if anim.parents[j] == i:
t = save_joint(f, anim, names, t, j, order=order, positions=positions)
end_site = False
if end_site:
f.write("%sEnd Site\n" % t)
f.write("%s{\n" % t)
t += '\t'
f.write("%sOFFSET %f %f %f\n" % (t, 0.0, 0.0, 0.0))
t = t[:-1]
f.write("%s}\n" % t)
t = t[:-1]
f.write("%s}\n" % t)
return t
================================================
FILE: dataset/bvh/bvh_parser.py
================================================
import torch
import numpy as np
import dataset.bvh.bvh_io as bvh_io
from utils.kinematics import ForwardKinematicsJoint
from utils.transforms import quat2repr6d
from utils.contact import foot_contact
from dataset.bvh.Quaternions import Quaternions
from dataset.bvh.bvh_writer import WriterWrapper
class Skeleton:
def __init__(self, names, parent, offsets, joint_reduction=True, skeleton_conf=None):
self._names = names
self.original_parent = parent
self._offsets = offsets
self._parent = None
self._ee_id = None
self.contact_names = []
for i, name in enumerate(self._names):
if ':' in name:
self._names[i] = name[name.find(':')+1:]
if joint_reduction or skeleton_conf is not None:
assert skeleton_conf is not None, 'skeleton_conf can not be None if you use joint reduction'
corps_names = skeleton_conf['corps_names']
self.contact_names = skeleton_conf['corps_names']
self.contact_threshold = skeleton_conf['contact_threshold']
self.contact_id = []
for i in self.contact_names:
self.contact_id.append(corps_names.index(i))
else:
self.skeleton_type = -1
corps_names = self._names
self.details = [] # joints that does not belong to the corps (we are not interested in them)
for i, name in enumerate(self._names):
if name not in corps_names: self.details.append(i)
self.corps = []
self.simplified_name = []
self.simplify_map = {}
self.inverse_simplify_map = {}
# Repermute the skeleton id according to the databse
for name in corps_names:
for j in range(len(self._names)):
if name in self._names[j]:
self.corps.append(j)
break
if len(self.corps) != len(corps_names):
for i in self.corps:
print(self._names[i], end=' ')
print(self.corps, self.skeleton_type, len(self.corps), sep='\n')
raise Exception('Problem in this skeleton')
self.joint_num_simplify = len(self.corps)
for i, j in enumerate(self.corps):
self.simplify_map[j] = i
self.inverse_simplify_map[i] = j
self.simplified_name.append(self._names[j])
self.inverse_simplify_map[0] = -1
for i in range(len(self._names)):
if i in self.details:
self.simplify_map[i] = -1
@property
def parent(self):
if self._parent is None:
self._parent = self.original_parent[self.corps].copy()
for i in range(self._parent.shape[0]):
if i >= 1: self._parent[i] = self.simplify_map[self._parent[i]]
self._parent = tuple(self._parent)
return self._parent
@property
def offsets(self):
return torch.tensor(self._offsets[self.corps], dtype=torch.float)
@property
def names(self):
return self.simplified_name
@property
def ee_id(self):
raise Exception('Abaddoned')
# if self._ee_id is None:
# self._ee_id = []
# for i in SkeletonDatabase.ee_names[self.skeleton_type]:
# self.ee_id._ee_id(corps_names[self.skeleton_type].index(i))
class BVH_file:
def __init__(self, file_path, skeleton_conf=None, requires_contact=False, joint_reduction=True, auto_scale=True):
self.anim = bvh_io.load(file_path)
self._names = self.anim.names
self.frametime = self.anim.frametime
if requires_contact or joint_reduction:
assert skeleton_conf is not None, 'Please provide a skeleton configuration for contact or joint reduction'
self.skeleton = Skeleton(self.anim.names, self.anim.parent, self.anim.offsets, joint_reduction, skeleton_conf)
# Downsample to 30 fps for our application
if self.frametime < 0.0084:
self.frametime *= 2
self.anim.positions = self.anim.positions[::2]
self.anim.rotations = self.anim.rotations[::2]
if self.frametime < 0.017:
self.frametime *= 2
self.anim.positions = self.anim.positions[::2]
self.anim.rotations = self.anim.rotations[::2]
self.requires_contact = requires_contact
if requires_contact:
self.contact_names = self.skeleton.contact_names
else:
self.contact_names = []
self.fk = ForwardKinematicsJoint(self.skeleton.parent, self.skeleton.offsets)
self.writer = WriterWrapper(self.skeleton.parent, self.skeleton.offsets)
self.auto_scale = auto_scale
if auto_scale:
self.scale = 1. / np.ceil(self.skeleton.offsets.max().cpu().numpy())
print(f'rescale the skeleton with scale: {self.scale}')
self.rescale(self.scale)
else:
self.scale = 1.0
if self.requires_contact:
gl_pos = self.joint_position()
self.contact_label = foot_contact(gl_pos[:, self.skeleton.contact_id],
threshold=self.skeleton.contact_threshold)
self.gl_pos = gl_pos
def local_pos(self):
gl_pos = self.joint_position()
local_pos = gl_pos - gl_pos[:, 0:1, :]
return local_pos[:, 1:]
def rescale(self, ratio):
self.anim.offsets *= ratio
self.anim.positions *= ratio
def to_tensor(self, repr='euler', rot_only=False):
if repr not in ['euler', 'quat', 'quaternion', 'repr6d']:
raise Exception('Unknown rotation representation')
positions = self.get_position()
rotations = self.get_rotation(repr=repr)
if rot_only:
return rotations.reshape(rotations.shape[0], -1)
if self.requires_contact:
virtual_contact = torch.zeros_like(rotations[:, :len(self.skeleton.contact_id)])
virtual_contact[..., 0] = self.contact_label
rotations = torch.cat([rotations, virtual_contact], dim=1)
rotations = rotations.reshape(rotations.shape[0], -1)
return torch.cat((rotations, positions), dim=-1)
def joint_position(self):
positions = torch.tensor(self.anim.positions[:, 0, :], dtype=torch.float)
rotations = self.anim.rotations[:, self.skeleton.corps, :]
rotations = Quaternions.from_euler(np.radians(rotations)).qs
rotations = torch.tensor(rotations, dtype=torch.float)
j_loc = self.fk.forward(rotations, positions)
return j_loc
def get_rotation(self, repr='quat'):
rotations = self.anim.rotations[:, self.skeleton.corps, :]
if repr == 'quaternion' or repr == 'quat' or repr == 'repr6d':
rotations = Quaternions.from_euler(np.radians(rotations)).qs
rotations = torch.tensor(rotations, dtype=torch.float)
if repr == 'repr6d':
rotations = quat2repr6d(rotations)
if repr == 'euler':
rotations = torch.tensor(rotations, dtype=torch.float)
return rotations
def get_position(self):
return torch.tensor(self.anim.positions[:, 0, :], dtype=torch.float)
def dfs(self, x, vis, dist):
fa = self.skeleton.parent
vis[x] = 1
for y in range(len(fa)):
if (fa[y] == x or fa[x] == y) and vis[y] == 0:
dist[y] = dist[x] + 1
self.dfs(y, vis, dist)
def get_neighbor(self, threshold, enforce_contact=False):
fa = self.skeleton.parent
neighbor_list = []
for x in range(0, len(fa)):
vis = [0 for _ in range(len(fa))]
dist = [0 for _ in range(len(fa))]
self.dfs(x, vis, dist)
neighbor = []
for j in range(0, len(fa)):
if dist[j] <= threshold:
neighbor.append(j)
neighbor_list.append(neighbor)
contact_list = []
if self.requires_contact:
for i, p_id in enumerate(self.skeleton.contact_id):
v_id = len(neighbor_list)
neighbor_list[p_id].append(v_id)
neighbor_list.append(neighbor_list[p_id])
contact_list.append(v_id)
root_neighbor = neighbor_list[0]
id_root = len(neighbor_list)
if enforce_contact:
root_neighbor = root_neighbor + contact_list
for j in contact_list:
neighbor_list[j] = list(set(neighbor_list[j]))
root_neighbor = list(set(root_neighbor))
for j in root_neighbor:
neighbor_list[j].append(id_root)
root_neighbor.append(id_root)
neighbor_list.append(root_neighbor) # Neighbor for root position
return neighbor_list
================================================
FILE: dataset/bvh/bvh_writer.py
================================================
import torch
from utils.transforms import quat2euler, repr6d2quat
# rotation with shape frame * J * 3
def write_bvh(parent, offset, rotation, position, names, frametime, order, path, endsite=None):
file = open(path, 'w')
frame = rotation.shape[0]
joint_num = rotation.shape[1]
order = order.upper()
file_string = 'HIERARCHY\n'
seq = []
def write_static(idx, prefix):
nonlocal parent, offset, rotation, names, order, endsite, file_string, seq
seq.append(idx)
if idx == 0:
name_label = 'ROOT ' + names[idx]
channel_label = 'CHANNELS 6 Xposition Yposition Zposition {}rotation {}rotation {}rotation'.format(*order)
else:
name_label = 'JOINT ' + names[idx]
channel_label = 'CHANNELS 3 {}rotation {}rotation {}rotation'.format(*order)
offset_label = 'OFFSET %.6f %.6f %.6f' % (offset[idx][0], offset[idx][1], offset[idx][2])
file_string += prefix + name_label + '\n'
file_string += prefix + '{\n'
file_string += prefix + '\t' + offset_label + '\n'
file_string += prefix + '\t' + channel_label + '\n'
has_child = False
for y in range(idx+1, rotation.shape[1]):
if parent[y] == idx:
has_child = True
write_static(y, prefix + '\t')
if not has_child:
file_string += prefix + '\t' + 'End Site\n'
file_string += prefix + '\t' + '{\n'
file_string += prefix + '\t\t' + 'OFFSET 0 0 0\n'
file_string += prefix + '\t' + '}\n'
file_string += prefix + '}\n'
write_static(0, '')
file_string += 'MOTION\n' + 'Frames: {}\n'.format(frame) + 'Frame Time: %.8f\n' % frametime
for i in range(frame):
file_string += '%.6f %.6f %.6f ' % (position[i][0], position[i][1], position[i][2])
for j in range(joint_num):
idx = seq[j]
file_string += '%.6f %.6f %.6f ' % (rotation[i][idx][0], rotation[i][idx][1], rotation[i][idx][2])
file_string += '\n'
file.write(file_string)
return file_string
class WriterWrapper:
def __init__(self, parents, offset=None):
self.parents = parents
self.offset = offset
def write(self, filename, rot, pos, offset=None, names=None, repr='quat'):
"""
Write animation to bvh file
:param filename:
:param rot: Quaternion as (w, x, y, z)
:param pos:
:param offset:
:return:
"""
if repr not in ['euler', 'quat', 'quaternion', 'repr6d']:
raise Exception('Unknown rotation representation')
if offset is None:
offset = self.offset
if not isinstance(offset, torch.Tensor):
offset = torch.tensor(offset)
n_bone = offset.shape[0]
if repr == 'repr6d':
rot = rot.reshape(rot.shape[0], -1, 6)
rot = repr6d2quat(rot)
if repr == 'repr6d' or repr == 'quat' or repr == 'quaternion':
rot = rot.reshape(rot.shape[0], -1, 4)
rot /= rot.norm(dim=-1, keepdim=True) ** 0.5
euler = quat2euler(rot, order='xyz')
rot = euler
if names is None:
names = ['%02d' % i for i in range(n_bone)]
write_bvh(self.parents, offset, rot, pos, names, 1, 'xyz', filename)
================================================
FILE: dataset/bvh_motion.py
================================================
import os
import os.path as osp
import torch
import numpy as np
import torch.nn.functional as F
from .motion import MotionData
from .bvh.bvh_parser import BVH_file
## Some skeleton configurations
crab_dance_corps_names = ['ORG_Hips', 'ORG_BN_Bip01_Pelvis', 'DEF_BN_Eye_L_01', 'DEF_BN_Eye_L_02', 'DEF_BN_Eye_L_03', 'DEF_BN_Eye_L_03_end', 'DEF_BN_Eye_R_01', 'DEF_BN_Eye_R_02', 'DEF_BN_Eye_R_03', 'DEF_BN_Eye_R_03_end', 'DEF_BN_Leg_L_11', 'DEF_BN_Leg_L_12', 'DEF_BN_Leg_L_13', 'DEF_BN_Leg_L_14', 'DEF_BN_Leg_L_15', 'DEF_BN_Leg_L_15_end', 'DEF_BN_Leg_R_11', 'DEF_BN_Leg_R_12', 'DEF_BN_Leg_R_13', 'DEF_BN_Leg_R_14', 'DEF_BN_Leg_R_15', 'DEF_BN_Leg_R_15_end', 'DEF_BN_leg_L_01', 'DEF_BN_leg_L_02', 'DEF_BN_leg_L_03', 'DEF_BN_leg_L_04', 'DEF_BN_leg_L_05', 'DEF_BN_leg_L_05_end',
'DEF_BN_leg_L_06', 'DEF_BN_Leg_L_07', 'DEF_BN_Leg_L_08', 'DEF_BN_Leg_L_09', 'DEF_BN_Leg_L_10', 'DEF_BN_Leg_L_10_end', 'DEF_BN_leg_R_01', 'DEF_BN_leg_R_02', 'DEF_BN_leg_R_03', 'DEF_BN_leg_R_04', 'DEF_BN_leg_R_05', 'DEF_BN_leg_R_05_end', 'DEF_BN_leg_R_06', 'DEF_BN_Leg_R_07', 'DEF_BN_Leg_R_08', 'DEF_BN_Leg_R_09', 'DEF_BN_Leg_R_10', 'DEF_BN_Leg_R_10_end', 'DEF_BN_Bip01_Pelvis', 'DEF_BN_Bip01_Pelvis_end', 'DEF_BN_Arm_L_01', 'DEF_BN_Arm_L_02', 'DEF_BN_Arm_L_03', 'DEF_BN_Arm_L_03_end', 'DEF_BN_Arm_R_01', 'DEF_BN_Arm_R_02', 'DEF_BN_Arm_R_03', 'DEF_BN_Arm_R_03_end']
skeleton_confs = {
'mixamo': {
'corps_names': ['Hips', 'LeftUpLeg', 'LeftLeg', 'LeftFoot', 'LeftToeBase', 'LeftToe_End', 'RightUpLeg', 'RightLeg', 'RightFoot', 'RightToeBase', 'RightToe_End', 'Spine', 'Spine1', 'Spine2', 'Neck', 'Head', 'LeftShoulder', 'LeftArm', 'LeftForeArm', 'LeftHand', 'RightShoulder', 'RightArm', 'RightForeArm', 'RightHand'],
'contact_names': ['LeftToe_End', 'RightToe_End', 'LeftToeBase', 'RightToeBase'],
'contact_threshold': 0.018
},
'crab_dance': {
'corps_names': crab_dance_corps_names,
'contact_names': [name for name in crab_dance_corps_names if 'end' in name and ('05' in name or '10' in name or '15' in name)],
'contact_threshold': 0.006
},
'xia': {
'corps_names': ['Hips', 'LHipJoint', 'LeftUpLeg', 'LeftLeg', 'LeftFoot', 'LeftToeBase', 'RHipJoint', 'RightUpLeg', 'RightLeg', 'RightFoot', 'RightToeBase', 'LowerBack', 'Spine', 'Spine1', 'Neck', 'Neck1', 'Head', 'LeftShoulder', 'LeftArm', 'LeftForeArm', 'LeftHand', 'LeftFingerBase', 'LeftHandIndex1', 'LThumb', 'RightShoulder', 'RightArm', 'RightForeArm', 'RightHand', 'RightFingerBase', 'RightHandIndex1', 'RThumb'],
'contact_names': ['LeftToeBase', 'RightToeBase'],
'contact_threshold': 0.006
}
}
class BVHMotion:
def __init__(self, bvh_file, skeleton_name=None, repr='quat', use_velo=True, keep_up_pos=False, up_axis='Y_UP', padding_last=False, requires_contact=False, joint_reduction=False):
'''
BVHMotion constructor
Args:
bvh_file : string, bvh_file path to load from
skelton_name : string, name of predefined skeleton, used when joint_reduction==True or contact==True
repr : string, rotation representation, support ['quat', 'repr6d', 'euler']
use_velo : book, whether to transform the joints positions to velocities
keep_up_pos : bool, whether to keep y position when converting to velocity
up_axis : string, string, up axis of the motion data
padding_last : bool, whether to pad the last position
requires_contact : bool, whether to concatenate contact information
joint_reduction : bool, whether to reduce the joint number
'''
self.bvh_file = bvh_file
self.skeleton_name = skeleton_name
if skeleton_name is not None:
assert skeleton_name in skeleton_confs, f'{skeleton_name} not found, please add a skeleton configuration.'
self.requires_contact = requires_contact
self.joint_reduction = joint_reduction
self.raw_data = BVH_file(bvh_file, skeleton_confs[skeleton_name] if skeleton_name is not None else None, requires_contact, joint_reduction, auto_scale=True)
self.motion_data = MotionData(self.raw_data.to_tensor(repr=repr).permute(1, 0).unsqueeze(0), repr=repr, use_velo=use_velo, keep_up_pos=keep_up_pos, up_axis=up_axis,
padding_last=padding_last, contact_id=self.raw_data.skeleton.contact_id if requires_contact else None)
@property
def repr(self):
return self.motion_data.repr
@property
def use_velo(self):
return self.motion_data.use_velo
@property
def keep_up_pos(self):
return self.motion_data.keep_up_pos
@property
def padding_last(self):
return self.motion_data.padding_last
@property
def concat_id(self):
return self.motion_data.contact_id
@property
def n_pad(self):
return self.motion_data.n_pad
@property
def n_contact(self):
return self.motion_data.n_contact
@property
def n_rot(self):
return self.motion_data.n_rot
def sample(self, size=None, slerp=False):
'''
Sample motion data, support slerp
'''
return self.motion_data.sample(size, slerp)
def write(self, filename, data):
'''
Parse motion data into position, velocity and contact(if exists)
data should be []
No batch support here!!!
'''
assert len(data.shape) == 3, 'The data format should be [batch_size x n_channels x n_frames]'
if self.n_pad:
data = data.clone()[:, :-self.n_pad]
if self.use_velo:
data = self.motion_data.to_position(data)
data = data.squeeze().permute(1, 0)
pos = data[..., -3:]
rot = data[..., :-3].reshape(data.shape[0], -1, self.n_rot)
if self.requires_contact:
contact = rot[..., -self.n_contact:, 0]
rot = rot[..., :-self.n_contact, :]
else:
contact = None
if contact is not None:
np.save(filename + '.contact', contact.detach().cpu().numpy())
# rescale the output
self.raw_data.rescale(1. / self.raw_data.scale)
pos *= 1. / self.raw_data.scale
self.raw_data.writer.write(filename, rot, pos, names=self.raw_data.skeleton.names, repr=self.repr)
def load_multiple_dataset(name_list, **kargs):
with open(name_list, 'r') as f:
names = [line.strip() for line in f.readlines()]
datasets = []
for f in names:
kargs['bvh_file'] = osp.join(osp.dirname(name_list), f)
datasets.append(BVHMotion(**kargs))
return datasets
================================================
FILE: dataset/motion.py
================================================
import torch
import torch.nn.functional as F
class MotionData:
def __init__(self, data, repr='quat', use_velo=True, keep_up_pos=True, up_axis='Y', padding_last=False, contact_id=None):
'''
BaseMotionData constructor
Args:
data : torch.Tensor, [batch_size x n_channels x n_frames] input motion data,
the channels dim shoud be [n_joints x n_dim_of_rotation + 3(global position)]
repr : string, rotation representation, support ['quat', 'repr6d', 'euler']
use_velo : book, whether to transform the joints positions to velocities
keep_up_pos : bool, whether to keep up position when converting to velocity
up_axis : string, string, up axis of the motion data
padding_last : bool, whether to pad the last position
contact_id : list, contact joints id
'''
self.data = data
self.repr = repr
self.use_velo = use_velo
self.keep_up_pos = keep_up_pos
self.up_axis = up_axis
self.padding_last = padding_last
self.contact_id = contact_id
self.begin_pos = None
# assert the rotation representation
if self.repr == 'quat':
self.n_rot = 4
assert (self.data.shape[1] - 3) % 4 == 0, 'rotation is not "quaternion" representation'
elif self.repr == 'repr6d':
self.n_rot = 6
assert (self.data.shape[1] - 3) % 6 == 0, 'rotation is not "repr6d" representation'
elif self.repr == 'eluer':
self.n_rot = 3
assert (self.data.shape[1] - 3) % 3 == 0, 'rotation is not "euler" representation'
# whether to pad the position data with zero
if self.padding_last:
self.n_pad = self.data.shape[1] - 3 # pad position channels to match the n_channels of rotation
paddings = torch.zeros_like(self.data[:, :self.n_pad])
self.data = torch.cat((self.data, paddings), dim=1)
else:
self.n_pad = 0
# get the contact information
if self.contact_id is not None:
self.n_contact = len(contact_id)
else:
self.n_contact = 0
# whether to keep y position when converting to velocity
if self.keep_up_pos:
if self.up_axis == 'X_UP':
self.velo_mask = [-2, -1]
elif self.up_axis == 'Y_UP':
self.velo_mask = [-3, -1]
elif self.up_axis == 'Z_UP':
self.velo_mask = [-3, -2]
else:
self.velo_mask = [-3, -2, -1]
# whether to convert global position to velocity
if self.use_velo:
self.data = self.to_velocity(self.data)
def __len__(self):
'''
return the number of motion frames
'''
return self.data.shape[-1]
def sample(self, size=None, slerp=False):
'''
sample the motion data using given size
'''
if size is None:
return self.data
else:
if slerp:
motion = self.slerp(self.data, size=size)
else:
motion = F.interpolate(self.data, size=size, mode='linear', align_corners=False)
return motion
def to_velocity(self, pos):
'''
convert motion data to velocity
'''
assert self.begin_pos is None, 'the motion data had been converted to velocity'
msk = [i - self.n_pad for i in self.velo_mask]
velo = pos.detach().clone().to(pos.device)
velo[:, msk, 1:] = pos[:, msk, 1:] - pos[:, msk, :-1]
self.begin_pos = pos[:, msk, 0].clone()
velo[:, msk, 0] = pos[:, msk, 1]
return velo
def to_position(self, velo):
'''
convert motion data to position
'''
assert self.begin_pos is not None, 'the motion data is already position'
msk = [i - self.n_pad for i in self.velo_mask]
pos = velo.detach().clone().to(velo.device)
pos[:, msk, 0] = self.begin_pos.to(velo.device)
pos[:, msk] = torch.cumsum(pos[:, msk], dim=-1)
self.begin_pos = None
return pos
================================================
FILE: dataset/tracks_motion.py
================================================
import os
from os.path import join as pjoin
import numpy as np
import copy
import torch
from .motion import MotionData
from ..utils.transforms import quat2repr6d, quat2euler, repr6d2quat
class TracksParser():
def __init__(self, tracks_json, scale):
self.tracks_json = tracks_json
self.scale = scale
self.skeleton_names = []
self.rotations = []
for i, track in enumerate(self.tracks_json):
self.skeleton_names.append(track['name'])
if i == 0:
assert track['type'] == 'vector'
self.position = np.array(track['values']).reshape(-1, 3) * self.scale
self.num_frames = self.position.shape[0]
else:
assert track['type'] == 'quaternion' # DEAFULT: quaternion
rotation = np.array(track['values']).reshape(-1, 4)
if rotation.shape[0] == 0:
rotation = np.zeros((self.num_frames, 4))
elif rotation.shape[0] < self.num_frames:
rotation = np.repeat(rotation, self.num_frames // rotation.shape[0], axis=0)
elif rotation.shape[0] > self.num_frames:
rotation = rotation[:self.num_frames]
self.rotations += [rotation]
self.rotations = np.array(self.rotations, dtype=np.float32)
def to_tensor(self, repr='euler', rot_only=False):
if repr not in ['euler', 'quat', 'quaternion', 'repr6d']:
raise Exception('Unknown rotation representation')
rotations = self.get_rotation(repr=repr)
positions = self.get_position()
if rot_only:
return rotations.reshape(rotations.shape[0], -1)
rotations = rotations.reshape(rotations.shape[0], -1)
return torch.cat((rotations, positions), dim=-1)
def get_rotation(self, repr='quat'):
if repr == 'quaternion' or repr == 'quat' or repr == 'repr6d':
rotations = torch.tensor(self.rotations, dtype=torch.float).transpose(0, 1)
if repr == 'repr6d':
rotations = quat2repr6d(rotations)
if repr == 'euler':
rotations = quat2euler(rotations)
return rotations
def get_position(self):
return torch.tensor(self.position, dtype=torch.float32)
class TracksMotion:
def __init__(self, tracks_json, scale=1.0, repr='quat', use_velo=True, keep_up_pos=True, up_axis='Y_UP', padding_last=False):
'''
TracksMotion constructor
Args:
tracks_json : dict, json format tracks data to load from
scale : float, scale of the tracks motion data
repr : string, rotation representation, support ['quat', 'repr6d', 'euler']
use_velo : book, whether to transform the joints positions to velocities
keep_up_pos : bool, whether to keep y position when converting to velocity
up_axis : string, string, up axis of the motion data
padding_last : bool, whether to pad the last position
'''
self.tracks_json = tracks_json
self.raw_data = TracksParser(tracks_json, scale)
self.motion_data = MotionData(self.raw_data.to_tensor(repr=repr).permute(1, 0).unsqueeze(0), repr=repr, use_velo=use_velo, keep_up_pos=keep_up_pos, up_axis=up_axis,
padding_last=padding_last, contact_id=None)
@property
def repr(self):
return self.motion_data.repr
@property
def use_velo(self):
return self.motion_data.use_velo
@property
def keep_up_pos(self):
return self.motion_data.keep_up_pos
@property
def padding_last(self):
return self.motion_data.padding_last
@property
def n_pad(self):
return self.motion_data.n_pad
@property
def n_rot(self):
return self.motion_data.n_rot
def sample(self, size=None, slerp=False):
'''
Sample motion data, support slerp
'''
return self.motion_data.sample(size, slerp)
def parse(self, motion, keep_velo=False,):
"""
No batch support here!!!
:returns tracks_json
"""
motion = motion.clone()
if self.use_velo and not keep_velo:
motion = self.motion_data.to_position(motion)
if self.n_pad:
motion = motion[:, :-self.n_pad]
motion = motion.squeeze().permute(1, 0)
pos = motion[..., -3:] / self.raw_data.scale
rot = motion[..., :-3].reshape(motion.shape[0], -1, self.n_rot)
if self.repr == 'repr6d':
rot = repr6d2quat(rot)
elif self.repr == 'euler':
raise NotImplementedError('parse "euler is not implemented yet!!!')
times = []
out_tracks_json = copy.deepcopy(self.tracks_json)
for i, _track in enumerate(out_tracks_json):
if i == 0:
times = [ j * out_tracks_json[i]['times'][1] for j in range(motion.shape[0])]
out_tracks_json[i]['values'] = pos.flatten().detach().cpu().numpy().tolist()
else:
out_tracks_json[i]['values'] = rot[:, i-1, :].flatten().detach().cpu().numpy().tolist()
out_tracks_json[i]['times'] = times
return out_tracks_json
================================================
FILE: docker/Dockerfile
================================================
FROM pytorch/pytorch:1.10.0-cuda11.3-cudnn8-devel
# For the convenience for users in China mainland
COPY apt-sources.list /etc/apt/sources.list
# Install some basic utilities
RUN rm /etc/apt/sources.list.d/cuda.list
RUN rm /etc/apt/sources.list.d/nvidia-ml.list
RUN apt-get update && apt-get install -y \
curl \
ca-certificates \
sudo \
git \
bzip2 \
libx11-6 \
gcc \
g++ \
libusb-1.0-0 \
libgl1-mesa-glx \
libglib2.0-dev \
openssh-server \
openssh-client \
iputils-ping \
unzip \
cmake \
libssl-dev \
libosmesa6-dev \
freeglut3-dev \
ffmpeg \
iputils-ping \
&& rm -rf /var/lib/apt/lists/*
# For the convenience for users in China mainland
RUN pip config set global.index-url https://pypi.mirrors.ustc.edu.cn/simple \
&& export PATH="/usr/local/bin:$PATH" \
&& /bin/bash -c "source ~/.bashrc"
RUN conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/ \
&& conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/ \
&& conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge/ \
&& conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/pytorch/ \
&& conda config --set show_channel_urls yes
# Install dependencies
COPY requirements.txt requirements.txt
RUN pip install -r requirements.txt --user
CMD ["python3"]
================================================
FILE: docker/README.md
================================================
## Build Docker Environment and use with GPU Support
Before you can use this Docker environment, you need to have the following:
- Docker installed on your system
- NVIDIA drivers installed on your system
- NVIDIA Container Toolkit installed on your system
### Build and Run
1. Build docker image:
```sh
docker build -t GenMM:latest .
```
2. Start the docker container:
```sh
docker run --gpus all -it GenMM:latest /bin/bash
```
3. Clone the repository:
```sh
git clone git@github.com:wyysf-98/GenMM.git
```
## Troubleshooting
If you encounter any issues with the Docker environment with GPU support, please check the following:
- Make sure that you have installed the NVIDIA drivers and NVIDIA Container Toolkit on your system.
- Make sure that you have specified the --gpus all option when starting the Docker container.
- Make sure that your deep learning application is configured to use the GPU.
================================================
FILE: docker/apt-sources.list
================================================
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
================================================
FILE: docker/requirements.txt
================================================
torch==1.12.1
torchvision==0.13.1
tensorboardX==2.5
tqdm==4.62.3
unfoldNd==0.2.0
pyyaml>=5.3.1
gradio==3.34.0
matplotlib==3.3.2
================================================
FILE: docker/requirements_blender.txt
================================================
torch==2.2.0
torchvision==0.17.0
tqdm==4.62.3
unfoldNd==0.2.0
pyyaml>=5.3.1
================================================
FILE: fix_contact.py
================================================
from dataset.bvh.bvh_parser import BVH_file
from os.path import join as pjoin
import numpy as np
import torch
from utils.contact import constrain_from_contact
from utils.kinematics import InverseKinematicsJoint2
from utils.transforms import repr6d2quat
from tqdm import tqdm
import argparse
import matplotlib.pyplot as plt
from dataset.bvh_motion import skeleton_confs
def continuous_filter(contact, length=2):
contact = contact.copy()
for j in range(contact.shape[1]):
c = contact[:, j]
t_len = 0
prev = c[0]
for i in range(contact.shape[0]):
if prev == c[i]:
t_len += 1
else:
if t_len <= length:
c[i - t_len:i] = c[i]
t_len = 1
prev = c[i]
return contact
def fix_negative_height(contact, constrain, cid):
floor = -1
constrain = constrain.clone()
for i in range(constrain.shape[0]):
for j in range(constrain.shape[1]):
if constrain[i, j, 1] < floor:
constrain[i, j, 1] = floor
return constrain
def fix_contact(bvh_file, contact):
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
cid = bvh_file.skeleton.contact_id
glb = bvh_file.joint_position()
rotation = bvh_file.get_rotation(repr='repr6d').to(device)
position = bvh_file.get_position().to(device)
contact = contact > 0.5
# contact = continuous_filter(contact)
constrain = constrain_from_contact(contact, glb, cid)
constrain = fix_negative_height(contact, constrain, cid).to(device)
cid = list(range(glb.shape[1]))
ik_solver = InverseKinematicsJoint2(rotation, position, bvh_file.skeleton.offsets.to(device), bvh_file.skeleton.parent,
constrain[:, cid], cid, 0.1, 0.01, use_velo=True)
loop = tqdm(range(500))
losses = []
for i in loop:
loss = ik_solver.step()
loop.set_description(f'loss = {loss:.07f}')
losses += [loss]
plt.plot(losses)
return repr6d2quat(ik_solver.rotations.detach()), ik_solver.get_position()
def fix_contact_on_file(prefix, name):
try:
contact = np.load(pjoin(prefix, name + '.bvh.contact.npy'))
except:
print(f'{name} not found')
return
bvh_file = BVH_file(pjoin(prefix, name + '.bvh'), no_scale=True, requires_contact=True)
print('Fixing foot contact with IK...')
res = fix_contact(bvh_file, contact)
bvh_file.writer.write(pjoin(prefix, name + '_fixed.bvh'), res[0], res[1], names=bvh_file.skeleton.names, repr='quat')
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--prefix', type=str, required=True)
parser.add_argument('--name', type=str, required=True)
parser.add_argument('--skeleton_name', type=str, required=True)
args = parser.parse_args()
if args.prefix[0] == '/':
prefix = args.prefix
else:
prefix = f'./results/{args.prefix}'
name = args.name
contact = np.load(pjoin(prefix, name + '.bvh.contact.npy'))
bvh_file = BVH_file(pjoin(prefix, name + '.bvh'), skeleton_confs[args.skeleton_name], auto_scale=False, requires_contact=True)
res = fix_contact(bvh_file, contact)
plt.savefig(f'{prefix}/losses.png')
bvh_file.writer.write(pjoin(prefix, name + '_fixed.bvh'), res[0], res[1], names=bvh_file.skeleton.names, repr='quat')
================================================
FILE: nearest_neighbor/losses.py
================================================
import torch
import torch.nn as nn
from .utils import extract_patches, combine_patches, efficient_cdist, get_NNs_Dists
class PatchCoherentLoss(torch.nn.Module):
def __init__(self, patch_size=7, stride=1, alpha=None, loop=False, cache=False):
super(PatchCoherentLoss, self).__init__()
self.patch_size = patch_size
assert self.patch_size % 2 == 1, "Only support odd patch size"
self.stride = stride
assert self.stride == 1, "Only support stride of 1"
self.alpha = alpha
self.loop = loop
self.cache = cache
if cache:
self.cached_data = None
def forward(self, X, Ys, dist_wrapper=None, ext=None, return_blended_results=False):
"""For each patch in input X find its NN in target Y and sum the their distances"""
assert X.shape[0] == 1, "Only support batch size of 1 for X"
dist_fn = lambda X, Y: dist_wrapper(efficient_cdist, X, Y) if dist_wrapper is not None else efficient_cdist(X, Y)
x_patches = extract_patches(X, self.patch_size, self.stride, loop=self.loop)
if not self.cache or self.cached_data is None:
y_patches = []
for y in Ys:
y_patches += [extract_patches(y, self.patch_size, self.stride, loop=False)]
y_patches = torch.cat(y_patches, dim=1)
self.cached_data = y_patches
else:
y_patches = self.cached_data
nnf, dist = get_NNs_Dists(dist_fn, x_patches.squeeze(0), y_patches.squeeze(0), self.alpha)
if return_blended_results:
return combine_patches(X.shape, y_patches[:, nnf, :], self.patch_size, self.stride, loop=self.loop), dist.mean()
else:
return dist.mean()
def clean_cache(self):
self.cached_data = None
================================================
FILE: nearest_neighbor/utils.py
================================================
"""
this file borrows some codes from https://github.com/ariel415el/Efficient-GPNN/blob/main/utils/NN.py.
"""
import torch
import torch.nn.functional as F
import unfoldNd
def extract_patches(x, patch_size, stride, loop=False):
"""Extract patches from a motion sequence"""
b, c, _t = x.shape
# manually padding to loop
if loop:
half = patch_size // 2
front, tail = x[:,:,:half], x[:,:,-half:]
x = torch.concat([tail, x, front], dim=-1)
x_patches = unfoldNd.unfoldNd(x, kernel_size=patch_size, stride=stride).transpose(1, 2).reshape(b, -1, c, patch_size)
return x_patches.view(b, -1, c * patch_size)
def combine_patches(x_shape, ys, patch_size, stride, loop=False):
"""Combine motion patches"""
# manually handle the loop situation
out_shape = [*x_shape]
if loop:
padding = patch_size // 2
out_shape[-1] = out_shape[-1] + padding * 2
combined = unfoldNd.foldNd(ys.permute(0, 2, 1), output_size=tuple(out_shape[-1:]), kernel_size=patch_size, stride=stride)
# normal fold matrix
input_ones = torch.ones(tuple(out_shape), dtype=ys.dtype, device=ys.device)
divisor = unfoldNd.unfoldNd(input_ones, kernel_size=patch_size, stride=stride)
divisor = unfoldNd.foldNd(divisor, output_size=tuple(out_shape[-1:]), kernel_size=patch_size, stride=stride)
combined = (combined / divisor).squeeze(dim=0).unsqueeze(0)
if loop:
half = patch_size // 2
front, tail = combined[:,:,:half], combined[:,:,-half:]
combined[:, :, half:2 * half] = (combined[:, :, half:2 * half] + tail) / 2
combined[:, :, - 2 * half:-half] = (front + combined[:, :, - 2 * half:-half]) / 2
combined = combined[:, :, half:-half]
return combined
def efficient_cdist(X, Y):
"""
borrowed from https://github.com/ariel415el/Efficient-GPNN/blob/main/utils/NN.py
Pytorch efficient way of computing distances between all vectors in X and Y, i.e (X[:, None] - Y[None, :])**2
Get the nearest neighbor index from Y for each X
:param X: (n1, d) tensor
:param Y: (n2, d) tensor
Returns a n2 n1 of indices
"""
dist = (X * X).sum(1)[:, None] + (Y * Y).sum(1)[None, :] - 2.0 * torch.mm(X, torch.transpose(Y, 0, 1))
d = X.shape[1]
dist /= d # normalize by size of vector to make dists independent of the size of d ( use same alpha for all patche-sizes)
return dist # DO NOT use torch.sqrt
def get_col_mins_efficient(dist_fn, X, Y, b=1024):
"""
borrowed from https://github.com/ariel415el/Efficient-GPNN/blob/main/utils/NN.py
Computes the l2 distance to the closest x or each y.
:param X: (n1, d) tensor
:param Y: (n2, d) tensor
Returns n1 long array of L2 distances
"""
n_batches = len(Y) // b
mins = torch.zeros(Y.shape[0], dtype=X.dtype, device=X.device)
for i in range(n_batches):
mins[i * b:(i + 1) * b] = dist_fn(X, Y[i * b:(i + 1) * b]).min(0)[0]
if len(Y) % b != 0:
mins[n_batches * b:] = dist_fn(X, Y[n_batches * b:]).min(0)[0]
return mins
def get_NNs_Dists(dist_fn, X, Y, alpha=None, b=1024):
"""
borrowed from https://github.com/ariel415el/Efficient-GPNN/blob/main/utils/NN.py
Get the nearest neighbor index from Y for each X.
Avoids holding a (n1 * n2) amtrix in order to reducing memory footprint to (b * max(n1,n2)).
:param X: (n1, d) tensor
:param Y: (n2, d) tensor
Returns a n2 n1 of indices amd distances
"""
if alpha is not None:
normalizing_row = get_col_mins_efficient(dist_fn, X, Y, b=b)
normalizing_row = alpha + normalizing_row[None, :]
else:
normalizing_row = 1
NNs = torch.zeros(X.shape[0], dtype=torch.long, device=X.device)
Dists = torch.zeros(X.shape[0], dtype=torch.float, device=X.device)
n_batches = len(X) // b
for i in range(n_batches):
dists = dist_fn(X[i * b:(i + 1) * b], Y) / normalizing_row
NNs[i * b:(i + 1) * b] = dists.min(1)[1]
Dists[i * b:(i + 1) * b] = dists.min(1)[0]
if len(X) % b != 0:
dists = dist_fn(X[n_batches * b:], Y) / normalizing_row
NNs[n_batches * b:] = dists.min(1)[1]
Dists[n_batches * b: ] = dists.min(1)[0]
return NNs, Dists
================================================
FILE: run_random_generation.py
================================================
import os
import os.path as osp
import argparse
from GenMM import GenMM
from nearest_neighbor.losses import PatchCoherentLoss
from dataset.bvh_motion import BVHMotion, load_multiple_dataset
from utils.base import ConfigParser, set_seed
args = argparse.ArgumentParser(
description='Random shuffle the input motion sequence')
args.add_argument('-m', '--mode', default='run',
choices=['run', 'eval', 'debug'], type=str, help='current run mode.')
args.add_argument('-i', '--input', required=True,
type=str, help='exemplar motion path.')
args.add_argument('-o', '--output_dir', default='./output',
type=str, help='output folder path for saving results.')
args.add_argument('-c', '--config', default='./configs/default.yaml',
type=str, help='config file path.')
args.add_argument('-s', '--seed', default=None,
type=int, help='random seed used.')
args.add_argument('-d', '--device', default="cuda:0",
type=str, help='device to use.')
args.add_argument('--post_precess', action='store_true',
help='whether to use IK post-process to fix foot contact.')
# Use argsparser to overwrite the configuration
# for dataset
args.add_argument('--skeleton_name', type=str,
help='(used when joint_reduction==True or contact==True) skeleton name to load pre-defined joints configuration.')
args.add_argument('--use_velo', type=int,
help='whether to use velocity rather than global position of each joint.')
args.add_argument('--repr', choices=['repr6d', 'quat', 'euler'], type=str,
help='rotation representation, support [epr6d, quat, reuler].')
args.add_argument('--requires_contact', type=int,
help='whether to use contact label.')
args.add_argument('--keep_up_pos', type=int,
help='whether to do not use velocity and keep the y(up) position.')
args.add_argument('--up_axis', type=str, choices=['X_UP', 'Y_UP', 'Z_UP'],
help='up axis of the motion.')
args.add_argument('--padding_last', type=int,
help='whether to pad the last position channel to match the rotation dimension.')
args.add_argument('--joint_reduction', type=int,
help='whether to simplify the skeleton using provided skeleton config.')
args.add_argument('--skeleton_aware', type=int,
help='whether to enable skeleton-aware component.')
args.add_argument('--joints_group', type=str,
help='joints spliting group for using skeleton-aware component.')
# for synthesis
args.add_argument('--num_frames', type=str,
help='number of synthesized frames, supported Nx(N times) and int input.')
args.add_argument('--alpha', type=float,
help='completeness/diversity trade-off alpha value.')
args.add_argument('--num_steps', type=int,
help='number of optimization steps at each pyramid level.')
args.add_argument('--noise_sigma', type=float,
help='standard deviation of the zero mean normal noise added to the initialization.')
args.add_argument('--coarse_ratio', type=float,
help='downscale ratio of the coarse level.')
args.add_argument('--coarse_ratio_factor', type=float,
help='downscale ratio of the coarse level.')
args.add_argument('--pyr_factor', type=float,
help='upsample ratio of each pyramid level.')
args.add_argument('--num_stages_limit', type=int,
help='limit of the number of stages.')
args.add_argument('--patch_size', type=int, help='patch size for generation.')
args.add_argument('--loop', type=int, help='whether to loop the sequence.')
cfg = ConfigParser(args)
def generate(cfg):
# seet seed for reproducible
set_seed(cfg.seed)
# set save path and prepare data for generation
if cfg.input.endswith('.bvh'):
base_dir = osp.join(
cfg.output_dir, cfg.input.split('/')[-1].split('.')[0])
motion_data = [BVHMotion(cfg.input, skeleton_name=cfg.skeleton_name, repr=cfg.repr,
use_velo=cfg.use_velo, keep_up_pos=cfg.keep_up_pos, up_axis=cfg.up_axis, padding_last=cfg.padding_last,
requires_contact=cfg.requires_contact, joint_reduction=cfg.joint_reduction)]
elif cfg.input.endswith('.txt'):
base_dir = osp.join(cfg.output_dir, cfg.input.split(
'/')[-2], cfg.input.split('/')[-1].split('.')[0])
motion_data = load_multiple_dataset(name_list=cfg.input, skeleton_name=cfg.skeleton_name, repr=cfg.repr,
use_velo=cfg.use_velo, keep_up_pos=cfg.keep_up_pos, up_axis=cfg.up_axis, padding_last=cfg.padding_last,
requires_contact=cfg.requires_contact, joint_reduction=cfg.joint_reduction)
else:
raise ValueError('exemplar must be a bvh file or a txt file')
prefix = f"s{cfg.seed}+{cfg.num_frames}+{cfg.repr}+use_velo_{cfg.use_velo}+kypose_{cfg.keep_up_pos}+padding_{cfg.padding_last}" \
f"+contact_{cfg.requires_contact}+jredu_{cfg.joint_reduction}+n{cfg.noise_sigma}+pyr{cfg.pyr_factor}" \
f"+r{cfg.coarse_ratio}_{cfg.coarse_ratio_factor}+itr{cfg.num_steps}+ps_{cfg.patch_size}+alpha_{cfg.alpha}" \
f"+loop_{cfg.loop}"
# perform the generation
model = GenMM(device=cfg.device, silent=True if cfg.mode == 'eval' else False)
criteria = PatchCoherentLoss(patch_size=cfg.patch_size, alpha=cfg.alpha, loop=cfg.loop, cache=True)
syn = model.run(motion_data, criteria,
num_frames=cfg.num_frames,
num_steps=cfg.num_steps,
noise_sigma=cfg.noise_sigma,
patch_size=cfg.patch_size,
coarse_ratio=cfg.coarse_ratio,
pyr_factor=cfg.pyr_factor,
debug_dir=save_dir if cfg.mode == 'debug' else None)
# save the generated results
save_dir = osp.join(base_dir, prefix)
os.makedirs(save_dir, exist_ok=True)
motion_data[0].write(f"{save_dir}/syn.bvh", syn)
if cfg.post_precess:
cmd = f"python fix_contact.py --prefix {osp.abspath(save_dir)} --name syn --skeleton_name={cfg.skeleton_name}"
os.system(cmd)
if __name__ == '__main__':
generate(cfg)
================================================
FILE: run_web_server.py
================================================
import json
import time
import torch
import argparse
import gradio as gr
from GenMM import GenMM
from nearest_neighbor.losses import PatchCoherentLoss
from dataset.tracks_motion import TracksMotion
args = argparse.ArgumentParser(description='Web server for GenMM')
args.add_argument('-d', '--device', default="cuda:0", type=str, help='device to use.')
args.add_argument('--ip', default="0.0.0.0", type=str, help='interface url to host.')
args.add_argument('--port', default=8000, type=int, help='interface port to serve.')
args.add_argument('--debug', action='store_true', help='debug mode.')
args = args.parse_args()
def generate(data):
data = json.loads(data)
# create track object
motion_data = [TracksMotion(data['tracks'], repr='repr6d', use_velo=True, keep_y_pos=True, padding_last=False)]
model = GenMM(device=args.device, silent=True)
criteria = PatchCoherentLoss(patch_size=data['setting']['patch_size'],
alpha=data['setting']['alpha'] if data['setting']['completeness'] else None,
loop=data['setting']['loop'], cache=True)
# start generation
start = time.time()
syn = model.run(motion_data, criteria,
num_frames=str(data['setting']['frames']),
num_steps=data['setting']['num_steps'],
noise_sigma=data['setting']['noise_sigma'],
patch_size=data['setting']['patch_size'],
coarse_ratio=f'{data["setting"]["coarse_ratio"]}x_nframes',
# coarse_ratio=f'3x_patchsize',
pyr_factor=data['setting']['pyr_factor'])
end = time.time()
data['time'] = end - start
data['tracks'] = motion_data[0].parse(syn)
return data
if __name__ == '__main__':
demo = gr.Interface(fn=generate, inputs="json", outputs="json")
demo.launch(debug=args.debug, server_name=args.ip, server_port=args.port)
================================================
FILE: utils/base.py
================================================
import os
import os.path as osp
import sys
import time
import yaml
import imageio
import random
import shutil
import random
import numpy as np
import torch
from tqdm import tqdm
# configuration
class ConfigParser():
def __init__(self, args):
"""
class to parse configuration.
"""
args = args.parse_args()
self.cfg = self.merge_config_file(args)
# set random seed
self.set_seed()
def __str__(self):
return str(self.cfg.__dict__)
def __getattr__(self, name):
"""
Access items use dot.notation.
"""
return self.cfg.__dict__[name]
def __getitem__(self, name):
"""
Access items like ordinary dict.
"""
return self.cfg.__dict__[name]
def merge_config_file(self, args, allow_invalid=True):
"""
Load json config file and merge the arguments
"""
assert args.config is not None
with open(args.config, 'r') as f:
cfg = yaml.safe_load(f)
if 'config' in cfg.keys():
del cfg['config']
f.close()
invalid_args = list(set(cfg.keys()) - set(dir(args)))
if invalid_args and not allow_invalid:
raise ValueError(f"Invalid args {invalid_args} in {args.config}.")
for k in list(cfg.keys()):
if k in args.__dict__.keys() and args.__dict__[k] is not None:
print('=========> overwrite config: {} = {}'.format(k, args.__dict__[k]))
del cfg[k]
args.__dict__.update(cfg)
return args
def set_seed(self):
''' set random seed for random, numpy and torch. '''
if 'seed' not in self.cfg.__dict__.keys():
return
if self.cfg.seed is None:
self.cfg.seed = int(time.time()) % 1000000
print('=========> set random seed: {}'.format(self.cfg.seed))
# fix random seeds for reproducibility
random.seed(self.cfg.seed)
np.random.seed(self.cfg.seed)
torch.manual_seed(self.cfg.seed)
torch.cuda.manual_seed(self.cfg.seed)
def save_codes_and_config(self, save_path):
"""
save codes and config to $save_path.
"""
cur_codes_path = osp.dirname(osp.dirname(os.path.abspath(__file__)))
if os.path.exists(save_path):
shutil.rmtree(save_path)
shutil.copytree(cur_codes_path, osp.join(save_path, 'codes'), \
ignore=shutil.ignore_patterns('*debug*', '*data*', '*output*', '*exps*', '*.txt', '*.json', '*.mp4', '*.png', '*.jpg', '*.bvh', '*.csv', '*.pth', '*.tar', '*.npz'))
with open(osp.join(save_path, 'config.yaml'), 'w') as f:
f.write(yaml.dump(self.cfg.__dict__))
f.close()
# logger util
class logger:
"""
Keeps track of the levels and steps of optimization. Logs it via TQDM
"""
def __init__(self, n_steps, n_lvls):
self.n_steps = n_steps
self.n_lvls = n_lvls
self.lvl = -1
self.lvl_step = 0
self.steps = 0
self.pbar = tqdm(total=self.n_lvls * self.n_steps, desc='Starting')
def step(self):
self.pbar.update(1)
self.steps += 1
self.lvl_step += 1
def new_lvl(self):
self.lvl += 1
self.lvl_step = 0
def print(self):
self.pbar.set_description(f'Lvl {self.lvl}/{self.n_lvls-1}, step {self.lvl_step}/{self.n_steps}')
# other utils
def set_seed(seed=None):
"""
Set all the seed for the reproducible
"""
if seed is not None:
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
================================================
FILE: utils/contact.py
================================================
import torch
def foot_contact_by_height(pos):
eps = 0.25
return (-eps < pos[..., 1]) * (pos[..., 1] < eps)
def velocity(pos, padding=False):
velo = pos[1:, ...] - pos[:-1, ...]
velo_norm = torch.norm(velo, dim=-1)
if padding:
pad = torch.zeros_like(velo_norm[:1, :])
velo_norm = torch.cat([pad, velo_norm], dim=0)
return velo_norm
def foot_contact(pos, ref_height=1., threshold=0.018):
velo_norm = velocity(pos)
contact = velo_norm < threshold
contact = contact.int()
padding = torch.zeros_like(contact)
contact = torch.cat([padding[:1, :], contact], dim=0)
return contact
def alpha(t):
return 2.0 * t * t * t - 3.0 * t * t + 1
def lerp(a, l, r):
return (1 - a) * l + a * r
def constrain_from_contact(contact, glb, fid='TBD', L=5):
"""
:param contact: contact label
:param glb: original global position
:param fid: joint id to fix, corresponding to the order in contact
:param L: frame to look forward/backward
:return:
"""
T = glb.shape[0]
for i, fidx in enumerate(fid): # fidx: index of the foot joint
fixed = contact[:, i] # [T]
s = 0
while s < T:
while s < T and fixed[s] == 0:
s += 1
if s >= T:
break
t = s
avg = glb[t, fidx].clone()
while t + 1 < T and fixed[t + 1] == 1:
t += 1
avg += glb[t, fidx].clone()
avg /= (t - s + 1)
for j in range(s, t + 1):
glb[j, fidx] = avg.clone()
s = t + 1
for s in range(T):
if fixed[s] == 1:
continue
l, r = None, None
consl, consr = False, False
for k in range(L):
if s - k - 1 < 0:
break
if fixed[s - k - 1]:
l = s - k - 1
consl = True
break
for k in range(L):
if s + k + 1 >= T:
break
if fixed[s + k + 1]:
r = s + k + 1
consr = True
break
if not consl and not consr:
continue
if consl and consr:
litp = lerp(alpha(1.0 * (s - l + 1) / (L + 1)),
glb[s, fidx], glb[l, fidx])
ritp = lerp(alpha(1.0 * (r - s + 1) / (L + 1)),
glb[s, fidx], glb[r, fidx])
itp = lerp(alpha(1.0 * (s - l + 1) / (r - l + 1)),
ritp, litp)
glb[s, fidx] = itp.clone()
continue
if consl:
litp = lerp(alpha(1.0 * (s - l + 1) / (L + 1)),
glb[s, fidx], glb[l, fidx])
glb[s, fidx] = litp.clone()
continue
if consr:
ritp = lerp(alpha(1.0 * (r - s + 1) / (L + 1)),
glb[s, fidx], glb[r, fidx])
glb[s, fidx] = ritp.clone()
return glb
================================================
FILE: utils/kinematics.py
================================================
import torch
from utils.transforms import quat2mat, repr6d2mat, euler2mat
class ForwardKinematics:
def __init__(self, parents, offsets=None):
self.parents = parents
if offsets is not None and len(offsets.shape) == 2:
offsets = offsets.unsqueeze(0)
self.offsets = offsets
def forward(self, rots, offsets=None, global_pos=None):
"""
Forward Kinematics: returns a per-bone transformation
@param rots: local joint rotations (batch_size, bone_num, 3, 3)
@param offsets: (batch_size, bone_num, 3) or None
@param global_pos: global_position: (batch_size, 3) or keep it as in offsets (default)
@return: (batch_szie, bone_num, 3, 4)
"""
rots = rots.clone()
if offsets is None:
offsets = self.offsets.to(rots.device)
if global_pos is None:
global_pos = offsets[:, 0]
pos = torch.zeros((rots.shape[0], rots.shape[1], 3), device=rots.device)
rest_pos = torch.zeros_like(pos)
res = torch.zeros((rots.shape[0], rots.shape[1], 3, 4), device=rots.device)
pos[:, 0] = global_pos
rest_pos[:, 0] = offsets[:, 0]
for i, p in enumerate(self.parents):
if i != 0:
rots[:, i] = torch.matmul(rots[:, p], rots[:, i])
pos[:, i] = torch.matmul(rots[:, p], offsets[:, i].unsqueeze(-1)).squeeze(-1) + pos[:, p]
rest_pos[:, i] = rest_pos[:, p] + offsets[:, i]
res[:, i, :3, :3] = rots[:, i]
res[:, i, :, 3] = torch.matmul(rots[:, i], -rest_pos[:, i].unsqueeze(-1)).squeeze(-1) + pos[:, i]
return res
def accumulate(self, local_rots):
"""
Get global joint rotation from local rotations
@param local_rots: (batch_size, n_bone, 3, 3)
@return: global_rotations
"""
res = torch.empty_like(local_rots)
for i, p in enumerate(self.parents):
if i == 0:
res[:, i] = local_rots[:, i]
else:
res[:, i] = torch.matmul(res[:, p], local_rots[:, i])
return res
def unaccumulate(self, global_rots):
"""
Get local joint rotation from global rotations
@param global_rots: (batch_size, n_bone, 3, 3)
@return: local_rotations
"""
res = torch.empty_like(global_rots)
inv = torch.empty_like(global_rots)
for i, p in enumerate(self.parents):
if i == 0:
inv[:, i] = global_rots[:, i].transpose(-2, -1)
res[:, i] = global_rots[:, i]
continue
res[:, i] = torch.matmul(inv[:, p], global_rots[:, i])
inv[:, i] = torch.matmul(res[:, i].transpose(-2, -1), inv[:, p])
return res
class ForwardKinematicsJoint:
def __init__(self, parents, offset):
self.parents = parents
self.offset = offset
'''
rotation should have shape batch_size * Joint_num * (3/4) * Time
position should have shape batch_size * 3 * Time
offset should have shape batch_size * Joint_num * 3
output have shape batch_size * Time * Joint_num * 3
'''
def forward(self, rotation: torch.Tensor, position: torch.Tensor, offset=None,
world=True):
'''
if not quater and rotation.shape[-2] != 3: raise Exception('Unexpected shape of rotation')
if quater and rotation.shape[-2] != 4: raise Exception('Unexpected shape of rotation')
rotation = rotation.permute(0, 3, 1, 2)
position = position.permute(0, 2, 1)
'''
if rotation.shape[-1] == 6:
transform = repr6d2mat(rotation)
elif rotation.shape[-1] == 4:
norm = torch.norm(rotation, dim=-1, keepdim=True)
rotation = rotation / norm
transform = quat2mat(rotation)
elif rotation.shape[-1] == 3:
transform = euler2mat(rotation)
else:
raise Exception('Only accept quaternion rotation input')
result = torch.empty(transform.shape[:-2] + (3,), device=position.device)
if offset is None:
offset = self.offset
offset = offset.reshape((-1, 1, offset.shape[-2], offset.shape[-1], 1))
result[..., 0, :] = position
for i, pi in enumerate(self.parents):
if pi == -1:
assert i == 0
continue
result[..., i, :] = torch.matmul(transform[..., pi, :, :], offset[..., i, :, :]).squeeze()
transform[..., i, :, :] = torch.matmul(transform[..., pi, :, :].clone(), transform[..., i, :, :].clone())
if world: result[..., i, :] += result[..., pi, :]
return result
class InverseKinematicsJoint:
def __init__(self, rotations: torch.Tensor, positions: torch.Tensor, offset, parents, constrains):
self.rotations = rotations.detach().clone()
self.rotations.requires_grad_(True)
self.position = positions.detach().clone()
self.position.requires_grad_(True)
self.parents = parents
self.offset = offset
self.constrains = constrains
self.optimizer = torch.optim.Adam([self.position, self.rotations], lr=1e-3, betas=(0.9, 0.999))
self.criteria = torch.nn.MSELoss()
self.fk = ForwardKinematicsJoint(parents, offset)
self.glb = None
def step(self):
self.optimizer.zero_grad()
glb = self.fk.forward(self.rotations, self.position)
loss = self.criteria(glb, self.constrains)
loss.backward()
self.optimizer.step()
self.glb = glb
return loss.item()
class InverseKinematicsJoint2:
def __init__(self, rotations: torch.Tensor, positions: torch.Tensor, offset, parents, constrains, cid,
lambda_rec_rot=1., lambda_rec_pos=1., use_velo=False):
self.use_velo = use_velo
self.rotations_ori = rotations.detach().clone()
self.rotations = rotations.detach().clone()
self.rotations.requires_grad_(True)
self.position_ori = positions.detach().clone()
self.position = positions.detach().clone()
if self.use_velo:
self.position[1:] = self.position[1:] - self.position[:-1]
self.position.requires_grad_(True)
self.parents = parents
self.offset = offset
self.constrains = constrains.detach().clone()
self.cid = cid
self.lambda_rec_rot = lambda_rec_rot
self.lambda_rec_pos = lambda_rec_pos
self.optimizer = torch.optim.Adam([self.position, self.rotations], lr=1e-3, betas=(0.9, 0.999))
self.criteria = torch.nn.MSELoss()
self.fk = ForwardKinematicsJoint(parents, offset)
self.glb = None
def step(self):
self.optimizer.zero_grad()
if self.use_velo:
position = torch.cumsum(self.position, dim=0)
else:
position = self.position
glb = self.fk.forward(self.rotations, position)
self.constrain_loss = self.criteria(glb[:, self.cid], self.constrains)
self.rec_loss_rot = self.criteria(self.rotations, self.rotations_ori)
self.rec_loss_pos = self.criteria(self.position, self.position_ori)
loss = self.constrain_loss + self.rec_loss_rot * self.lambda_rec_rot + self.rec_loss_pos * self.lambda_rec_pos
loss.backward()
self.optimizer.step()
self.glb = glb
return loss.item()
def get_position(self):
if self.use_velo:
position = torch.cumsum(self.position.detach(), dim=0)
else:
position = self.position.detach()
return position
================================================
FILE: utils/rename_mixamo_rig.py
================================================
# rename_mixamo_prefix.py
import bpy, re
rx = re.compile(r"mixamorig\d+:") # any number before the colon
for obj in bpy.data.objects:
if obj.type == 'ARMATURE':
for b in obj.data.bones:
b.name = rx.sub("mixamorig:", b.name)
================================================
FILE: utils/skeleton.py
================================================
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
import numpy as np
class SkeletonConv(nn.Module):
def __init__(self, neighbour_list, in_channels, out_channels, kernel_size, joint_num, stride=1, padding=0,
bias=True, padding_mode='zeros', add_offset=False, in_offset_channel=0):
super(SkeletonConv, self).__init__()
if in_channels % joint_num != 0 or out_channels % joint_num != 0:
raise Exception('in/out channels should be divided by joint_num')
self.in_channels_per_joint = in_channels // joint_num
self.out_channels_per_joint = out_channels // joint_num
if padding_mode == 'zeros': padding_mode = 'constant'
self.expanded_neighbour_list = []
self.expanded_neighbour_list_offset = []
self.neighbour_list = neighbour_list
self.add_offset = add_offset
self.joint_num = joint_num
self.stride = stride
self.dilation = 1
self.groups = 1
self.padding = padding
self.padding_mode = padding_mode
self._padding_repeated_twice = (padding, padding)
for neighbour in neighbour_list:
expanded = []
for k in neighbour:
for i in range(self.in_channels_per_joint):
expanded.append(k * self.in_channels_per_joint + i)
self.expanded_neighbour_list.append(expanded)
if self.add_offset:
self.offset_enc = SkeletonLinear(neighbour_list, in_offset_channel * len(neighbour_list), out_channels)
for neighbour in neighbour_list:
expanded = []
for k in neighbour:
for i in range(add_offset):
expanded.append(k * in_offset_channel + i)
self.expanded_neighbour_list_offset.append(expanded)
self.weight = torch.zeros(out_channels, in_channels, kernel_size)
if bias:
self.bias = torch.zeros(out_channels)
else:
self.register_parameter('bias', None)
self.mask = torch.zeros_like(self.weight)
for i, neighbour in enumerate(self.expanded_neighbour_list):
self.mask[self.out_channels_per_joint * i: self.out_channels_per_joint * (i + 1), neighbour, ...] = 1
self.mask = nn.Parameter(self.mask, requires_grad=False)
self.description = 'SkeletonConv(in_channels_per_armature={}, out_channels_per_armature={}, kernel_size={}, ' \
'joint_num={}, stride={}, padding={}, bias={})'.format(
in_channels // joint_num, out_channels // joint_num, kernel_size, joint_num, stride, padding, bias
)
self.reset_parameters()
def reset_parameters(self):
for i, neighbour in enumerate(self.expanded_neighbour_list):
""" Use temporary variable to avoid assign to copy of slice, which might lead to un expected result """
tmp = torch.zeros_like(self.weight[self.out_channels_per_joint * i: self.out_channels_per_joint * (i + 1),
neighbour, ...])
nn.init.kaiming_uniform_(tmp, a=math.sqrt(5))
self.weight[self.out_channels_per_joint * i: self.out_channels_per_joint * (i + 1),
neighbour, ...] = tmp
if self.bias is not None:
fan_in, _ = nn.init._calculate_fan_in_and_fan_out(
self.weight[self.out_channels_per_joint * i: self.out_channels_per_joint * (i + 1), neighbour, ...])
bound = 1 / math.sqrt(fan_in)
tmp = torch.zeros_like(
self.bias[self.out_channels_per_joint * i: self.out_channels_per_joint * (i + 1)])
nn.init.uniform_(tmp, -bound, bound)
self.bias[self.out_channels_per_joint * i: self.out_channels_per_joint * (i + 1)] = tmp
self.weight = nn.Parameter(self.weight)
if self.bias is not None:
self.bias = nn.Parameter(self.bias)
def set_offset(self, offset):
if not self.add_offset: raise Exception('Wrong Combination of Parameters')
self.offset = offset.reshape(offset.shape[0], -1)
def forward(self, input):
weight_masked = self.weight * self.mask
res = F.conv1d(F.pad(input, self._padding_repeated_twice, mode=self.padding_mode),
weight_masked, self.bias, self.stride,
0, self.dilation, self.groups)
if self.add_offset:
offset_res = self.offset_enc(self.offset)
offset_res = offset_res.reshape(offset_res.shape + (1, ))
res += offset_res / 100
return res
def __repr__(self):
return self.description
class SkeletonLinear(nn.Module):
def __init__(self, neighbour_list, in_channels, out_channels, extra_dim1=False):
super(SkeletonLinear, self).__init__()
self.neighbour_list = neighbour_list
self.in_channels = in_channels
self.out_channels = out_channels
self.in_channels_per_joint = in_channels // len(neighbour_list)
self.out_channels_per_joint = out_channels // len(neighbour_list)
self.extra_dim1 = extra_dim1
self.expanded_neighbour_list = []
for neighbour in neighbour_list:
expanded = []
for k in neighbour:
for i in range(self.in_channels_per_joint):
expanded.append(k * self.in_channels_per_joint + i)
self.expanded_neighbour_list.append(expanded)
self.weight = torch.zeros(out_channels, in_channels)
self.mask = torch.zeros(out_channels, in_channels)
self.bias = nn.Parameter(torch.Tensor(out_channels))
self.reset_parameters()
def reset_parameters(self):
for i, neighbour in enumerate(self.expanded_neighbour_list):
tmp = torch.zeros_like(
self.weight[i*self.out_channels_per_joint: (i + 1)*self.out_channels_per_joint, neighbour]
)
self.mask[i*self.out_channels_per_joint: (i + 1)*self.out_channels_per_joint, neighbour] = 1
nn.init.kaiming_uniform_(tmp, a=math.sqrt(5))
self.weight[i*self.out_channels_per_joint: (i + 1)*self.out_channels_per_joint, neighbour] = tmp
fan_in, _ = nn.init._calculate_fan_in_and_fan_out(self.weight)
bound = 1 / math.sqrt(fan_in)
nn.init.uniform_(self.bias, -bound, bound)
self.weight = nn.Parameter(self.weight)
self.mask = nn.Parameter(self.mask, requires_grad=False)
def forward(self, input):
input = input.reshape(input.shape[0], -1)
weight_masked = self.weight * self.mask
res = F.linear(input, weight_masked, self.bias)
if self.extra_dim1: res = res.reshape(res.shape + (1,))
return res
class SkeletonPoolJoint(nn.Module):
def __init__(self, topology, pooling_mode, channels_per_joint, last_pool=False):
super(SkeletonPoolJoint, self).__init__()
if pooling_mode != 'mean':
raise Exception('Unimplemented pooling mode in matrix_implementation')
self.joint_num = len(topology)
self.parent = topology
self.pooling_list = []
self.pooling_mode = pooling_mode
self.pooling_map = [-1 for _ in range(len(self.parent))]
self.child = [-1 for _ in range(len(self.parent))]
children_cnt = [0 for _ in range(len(self.parent))]
for x, pa in enumerate(self.parent):
if pa < 0: continue
children_cnt[pa] += 1
self.child[pa] = x
self.pooling_map[0] = 0
for x in range(len(self.parent)):
if children_cnt[x] == 0 or (children_cnt[x] == 1 and children_cnt[self.child[x]] > 1):
while children_cnt[x] <= 1:
pa = self.parent[x]
if last_pool:
seq = [x]
while pa != -1 and children_cnt[pa] == 1:
seq = [pa] + seq
x = pa
pa = self.parent[x]
self.pooling_list.append(seq)
break
else:
if pa != -1 and children_cnt[pa] == 1:
self.pooling_list.append([pa, x])
x = self.parent[pa]
else:
self.pooling_list.append([x, ])
break
elif children_cnt[x] > 1:
self.pooling_list.append([x, ])
self.description = 'SkeletonPool(in_joint_num={}, out_joint_num={})'.format(
len(topology), len(self.pooling_list),
)
self.pooling_list.sort(key=lambda x:x[0])
for i, a in enumerate(self.pooling_list):
for j in a:
self.pooling_map[j] = i
self.output_joint_num = len(self.pooling_list)
self.new_topology = [-1 for _ in range(len(self.pooling_list))]
for i, x in enumerate(self.pooling_list):
if i < 1: continue
self.new_topology[i] = self.pooling_map[self.parent[x[0]]]
self.weight = torch.zeros(len(self.pooling_list) * channels_per_joint, self.joint_num * channels_per_joint)
for i, pair in enumerate(self.pooling_list):
for j in pair:
for c in range(channels_per_joint):
self.weight[i * channels_per_joint + c, j * channels_per_joint + c] = 1.0 / len(pair)
self.weight = nn.Parameter(self.weight, requires_grad=False)
def forward(self, input: torch.Tensor):
return torch.matmul(self.weight, input.unsqueeze(-1)).squeeze(-1)
class SkeletonPool(nn.Module):
def __init__(self, edges, pooling_mode, channels_per_edge, last_pool=False):
super(SkeletonPool, self).__init__()
if pooling_mode != 'mean':
raise Exception('Unimplemented pooling mode in matrix_implementation')
self.channels_per_edge = channels_per_edge
self.pooling_mode = pooling_mode
self.edge_num = len(edges) + 1
self.seq_list = []
self.pooling_list = []
self.new_edges = []
degree = [0] * 100
for edge in edges:
degree[edge[0]] += 1
degree[edge[1]] += 1
def find_seq(j, seq):
nonlocal self, degree, edges
if degree[j] > 2 and j != 0:
self.seq_list.append(seq)
seq = []
if degree[j] == 1:
self.seq_list.append(seq)
return
for idx, edge in enumerate(edges):
if edge[0] == j:
find_seq(edge[1], seq + [idx])
find_seq(0, [])
for seq in self.seq_list:
if last_pool:
self.pooling_list.append(seq)
continue
if len(seq) % 2 == 1:
self.pooling_list.append([seq[0]])
self.new_edges.append(edges[seq[0]])
seq = seq[1:]
for i in range(0, len(seq), 2):
self.pooling_list.append([seq[i], seq[i + 1]])
self.new_edges.append([edges[seq[i]][0], edges[seq[i + 1]][1]])
# add global position
self.pooling_list.append([self.edge_num - 1])
self.description = 'SkeletonPool(in_edge_num={}, out_edge_num={})'.format(
len(edges), len(self.pooling_list)
)
self.weight = torch.zeros(len(self.pooling_list) * channels_per_edge, self.edge_num * channels_per_edge)
for i, pair in enumerate(self.pooling_list):
for j in pair:
for c in range(channels_per_edge):
self.weight[i * channels_per_edge + c, j * channels_per_edge + c] = 1.0 / len(pair)
self.weight = nn.Parameter(self.weight, requires_grad=False)
def forward(self, input: torch.Tensor):
return torch.matmul(self.weight, input)
class SkeletonUnpool(nn.Module):
def __init__(self, pooling_list, channels_per_edge):
super(SkeletonUnpool, self).__init__()
self.pooling_list = pooling_list
self.input_joint_num = len(pooling_list)
self.output_joint_num = 0
self.channels_per_edge = channels_per_edge
for t in self.pooling_list:
self.output_joint_num += len(t)
self.description = 'SkeletonUnpool(in_joint_num={}, out_joint_num={})'.format(
self.input_joint_num, self.output_joint_num,
)
self.weight = torch.zeros(self.output_joint_num * channels_per_edge, self.input_joint_num * channels_per_edge)
for i, pair in enumerate(self.pooling_list):
for j in pair:
for c in range(channels_per_edge):
self.weight[j * channels_per_edge + c, i * channels_per_edge + c] = 1
self.weight = nn.Parameter(self.weight)
self.weight.requires_grad_(False)
def forward(self, input: torch.Tensor):
return torch.matmul(self.weight, input.unsqueeze(-1)).squeeze(-1)
def find_neighbor_joint(parents, threshold):
n_joint = len(parents)
dist_mat = np.empty((n_joint, n_joint), dtype=np.int)
dist_mat[:, :] = 100000
for i, p in enumerate(parents):
dist_mat[i, i] = 0
if i != 0:
dist_mat[i, p] = dist_mat[p, i] = 1
"""
Floyd's algorithm
"""
for k in range(n_joint):
for i in range(n_joint):
for j in range(n_joint):
dist_mat[i, j] = min(dist_mat[i, j], dist_mat[i, k] + dist_mat[k, j])
neighbor_list = []
for i in range(n_joint):
neighbor = []
for j in range(n_joint):
if dist_mat[i, j] <= threshold:
neighbor.append(j)
neighbor_list.append(neighbor)
return neighbor_list
================================================
FILE: utils/transforms.py
================================================
import numpy as np
import torch
def batch_mm(matrix, matrix_batch):
"""
https://github.com/pytorch/pytorch/issues/14489#issuecomment-607730242
:param matrix: Sparse or dense matrix, size (m, n).
:param matrix_batch: Batched dense matrices, size (b, n, k).
:return: The batched matrix-matrix product, size (m, n) x (b, n, k) = (b, m, k).
"""
batch_size = matrix_batch.shape[0]
# Stack the vector batch into columns. (b, n, k) -> (n, b, k) -> (n, b*k)
vectors = matrix_batch.transpose(0, 1).reshape(matrix.shape[1], -1)
# A matrix-matrix product is a batched matrix-vector product of the columns.
# And then reverse the reshaping. (m, n) x (n, b*k) = (m, b*k) -> (m, b, k) -> (b, m, k)
return matrix.mm(vectors).reshape(matrix.shape[0], batch_size, -1).transpose(1, 0)
def aa2quat(rots, form='wxyz', unified_orient=True):
"""
Convert angle-axis representation to wxyz quaternion and to the half plan (w >= 0)
@param rots: angle-axis rotations, (*, 3)
@param form: quaternion format, either 'wxyz' or 'xyzw'
@param unified_orient: Use unified orientation for quaternion (quaternion is dual cover of SO3)
:return:
"""
angles = rots.norm(dim=-1, keepdim=True)
norm = angles.clone()
norm[norm < 1e-8] = 1
axis = rots / norm
quats = torch.empty(rots.shape[:-1] + (4,), device=rots.device, dtype=rots.dtype)
angles = angles * 0.5
if form == 'wxyz':
quats[..., 0] = torch.cos(angles.squeeze(-1))
quats[..., 1:] = torch.sin(angles) * axis
elif form == 'xyzw':
quats[..., :3] = torch.sin(angles) * axis
quats[..., 3] = torch.cos(angles.squeeze(-1))
if unified_orient:
idx = quats[..., 0] < 0
quats[idx, :] *= -1
return quats
def quat2aa(quats):
"""
Convert wxyz quaternions to angle-axis representation
:param quats:
:return:
"""
_cos = quats[..., 0]
xyz = quats[..., 1:]
_sin = xyz.norm(dim=-1)
norm = _sin.clone()
norm[norm < 1e-7] = 1
axis = xyz / norm.unsqueeze(-1)
angle = torch.atan2(_sin, _cos) * 2
return axis * angle.unsqueeze(-1)
def quat2mat(quats: torch.Tensor):
"""
Convert (w, x, y, z) quaternions to 3x3 rotation matrix
:param quats: quaternions of shape (..., 4)
:return: rotation matrices of shape (..., 3, 3)
"""
qw = quats[..., 0]
qx = quats[..., 1]
qy = quats[..., 2]
qz = quats[..., 3]
x2 = qx + qx
y2 = qy + qy
z2 = qz + qz
xx = qx * x2
yy = qy * y2
wx = qw * x2
xy = qx * y2
yz = qy * z2
wy = qw * y2
xz = qx * z2
zz = qz * z2
wz = qw * z2
m = torch.empty(quats.shape[:-1] + (3, 3), device=quats.device, dtype=quats.dtype)
m[..., 0, 0] = 1.0 - (yy + zz)
m[..., 0, 1] = xy - wz
m[..., 0, 2] = xz + wy
m[..., 1, 0] = xy + wz
m[..., 1, 1] = 1.0 - (xx + zz)
m[..., 1, 2] = yz - wx
m[..., 2, 0] = xz - wy
m[..., 2, 1] = yz + wx
m[..., 2, 2] = 1.0 - (xx + yy)
return m
def quat2euler(q, order='xyz', degrees=True):
"""
Convert (w, x, y, z) quaternions to xyz euler angles. This is used for bvh output.
"""
q0 = q[..., 0]
q1 = q[..., 1]
q2 = q[..., 2]
q3 = q[..., 3]
es = torch.empty(q0.shape + (3,), device=q.device, dtype=q.dtype)
if order == 'xyz':
es[..., 2] = torch.atan2(2 * (q0 * q3 - q1 * q2), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3)
es[..., 1] = torch.asin((2 * (q1 * q3 + q0 * q2)).clip(-1, 1))
es[..., 0] = torch.atan2(2 * (q0 * q1 - q2 * q3), q0 * q0 - q1 * q1 - q2 * q2 + q3 * q3)
else:
raise NotImplementedError('Cannot convert to ordering %s' % order)
if degrees:
es = es * 180 / np.pi
return es
def euler2mat(rots, order='xyz'):
axis = {'x': torch.tensor((1, 0, 0), device=rots.device),
'y': torch.tensor((0, 1, 0), device=rots.device),
'z': torch.tensor((0, 0, 1), device=rots.device)}
rots = rots / 180 * np.pi
mats = []
for i in range(3):
aa = axis[order[i]] * rots[..., i].unsqueeze(-1)
mats.append(aa2mat(aa))
return mats[0] @ (mats[1] @ mats[2])
def aa2mat(rots):
"""
Convert angle-axis representation to rotation matrix
:param rots: angle-axis representation
:return:
"""
quat = aa2quat(rots)
mat = quat2mat(quat)
return mat
def mat2quat(R) -> torch.Tensor:
'''
https://github.com/duolu/pyrotation/blob/master/pyrotation/pyrotation.py
Convert a rotation matrix to a unit quaternion.
This uses the Shepperd’s method for numerical stability.
'''
# The rotation matrix must be orthonormal
w2 = (1 + R[..., 0, 0] + R[..., 1, 1] + R[..., 2, 2])
x2 = (1 + R[..., 0, 0] - R[..., 1, 1] - R[..., 2, 2])
y2 = (1 - R[..., 0, 0] + R[..., 1, 1] - R[..., 2, 2])
z2 = (1 - R[..., 0, 0] - R[..., 1, 1] + R[..., 2, 2])
yz = (R[..., 1, 2] + R[..., 2, 1])
xz = (R[..., 2, 0] + R[..., 0, 2])
xy = (R[..., 0, 1] + R[..., 1, 0])
wx = (R[..., 2, 1] - R[..., 1, 2])
wy = (R[..., 0, 2] - R[..., 2, 0])
wz = (R[..., 1, 0] - R[..., 0, 1])
w = torch.empty_like(x2)
x = torch.empty_like(x2)
y = torch.empty_like(x2)
z = torch.empty_like(x2)
flagA = (R[..., 2, 2] < 0) * (R[..., 0, 0] > R[..., 1, 1])
flagB = (R[..., 2, 2] < 0) * (R[..., 0, 0] <= R[..., 1, 1])
flagC = (R[..., 2, 2] >= 0) * (R[..., 0, 0] < -R[..., 1, 1])
flagD = (R[..., 2, 2] >= 0) * (R[..., 0, 0] >= -R[..., 1, 1])
x[flagA] = torch.sqrt(x2[flagA])
w[flagA] = wx[flagA] / x[flagA]
y[flagA] = xy[flagA] / x[flagA]
z[flagA] = xz[flagA] / x[flagA]
y[flagB] = torch.sqrt(y2[flagB])
w[flagB] = wy[flagB] / y[flagB]
x[flagB] = xy[flagB] / y[flagB]
z[flagB] = yz[flagB] / y[flagB]
z[flagC] = torch.sqrt(z2[flagC])
w[flagC] = wz[flagC] / z[flagC]
x[flagC] = xz[flagC] / z[flagC]
y[flagC] = yz[flagC] / z[flagC]
w[flagD] = torch.sqrt(w2[flagD])
x[flagD] = wx[flagD] / w[flagD]
y[flagD] = wy[flagD] / w[flagD]
z[flagD] = wz[flagD] / w[flagD]
# if R[..., 2, 2] < 0:
#
# if R[..., 0, 0] > R[..., 1, 1]:
#
# x = torch.sqrt(x2)
# w = wx / x
# y = xy / x
# z = xz / x
#
# else:
#
# y = torch.sqrt(y2)
# w = wy / y
# x = xy / y
# z = yz / y
#
# else:
#
# if R[..., 0, 0] < -R[..., 1, 1]:
#
# z = torch.sqrt(z2)
# w = wz / z
# x = xz / z
# y = yz / z
#
# else:
#
# w = torch.sqrt(w2)
# x = wx / w
# y = wy / w
# z = wz / w
res = [w, x, y, z]
res = [z.unsqueeze(-1) for z in res]
return torch.cat(res, dim=-1) / 2
def quat2repr6d(quat):
mat = quat2mat(quat)
res = mat[..., :2, :]
res = res.reshape(res.shape[:-2] + (6, ))
return res
def repr6d2mat(repr):
x = repr[..., :3]
y = repr[..., 3:]
x = x / x.norm(dim=-1, keepdim=True)
z = torch.cross(x, y)
z = z / z.norm(dim=-1, keepdim=True)
y = torch.cross(z, x)
res = [x, y, z]
res = [v.unsqueeze(-2) for v in res]
mat = torch.cat(res, dim=-2)
return mat
def repr6d2quat(repr) -> torch.Tensor:
x = repr[..., :3]
y = repr[..., 3:]
x = x / x.norm(dim=-1, keepdim=True)
z = torch.cross(x, y)
z = z / z.norm(dim=-1, keepdim=True)
y = torch.cross(z, x)
res = [x, y, z]
res = [v.unsqueeze(-2) for v in res]
mat = torch.cat(res, dim=-2)
return mat2quat(mat)
def inv_affine(mat):
"""
Calculate the inverse of any affine transformation
"""
affine = torch.zeros((mat.shape[:2] + (1, 4)))
affine[..., 3] = 1
vert_mat = torch.cat((mat, affine), dim=2)
vert_mat_inv = torch.inverse(vert_mat)
return vert_mat_inv[..., :3, :]
def inv_rigid_affine(mat):
"""
Calculate the inverse of a rigid affine transformation
"""
res = mat.clone()
res[..., :3] = mat[..., :3].transpose(-2, -1)
res[..., 3] = -torch.matmul(res[..., :3], mat[..., 3].unsqueeze(-1)).squeeze(-1)
return res
def generate_pose(batch_size, device, uniform=False, factor=1, root_rot=False, n_bone=None, ee=None):
if n_bone is None: n_bone = 24
if ee is not None:
if root_rot:
ee.append(0)
n_bone_ = n_bone
n_bone = len(ee)
axis = torch.randn((batch_size, n_bone, 3), device=device)
axis /= axis.norm(dim=-1, keepdim=True)
if uniform:
angle = torch.rand((batch_size, n_bone, 1), device=device) * np.pi
else:
angle = torch.randn((batch_size, n_bone, 1), device=device) * np.pi / 6 * factor
angle.clamp(-np.pi, np.pi)
poses = axis * angle
if ee is not None:
res = torch.zeros((batch_size, n_bone_, 3), device=device)
for i, id in enumerate(ee):
res[:, id] = poses[:, i]
poses = res
poses = poses.reshape(batch_size, -1)
if not root_rot:
poses[..., :3] = 0
return poses
def slerp(l, r, t, unit=True):
"""
:param l: shape = (*, n)
:param r: shape = (*, n)
:param t: shape = (*)
:param unit: If l and h are unit vectors
:return:
"""
eps = 1e-8
if not unit:
l_n = l / torch.norm(l, dim=-1, keepdim=True)
r_n = r / torch.norm(r, dim=-1, keepdim=True)
else:
l_n = l
r_n = r
omega = torch.acos((l_n * r_n).sum(dim=-1).clamp(-1, 1))
dom = torch.sin(omega)
flag = dom < eps
res = torch.empty_like(l_n)
t_t = t[flag].unsqueeze(-1)
res[flag] = (1 - t_t) * l_n[flag] + t_t * r_n[flag]
flag = ~ flag
t_t = t[flag]
d_t = dom[flag]
va = torch.sin((1 - t_t) * omega[flag]) / d_t
vb = torch.sin(t_t * omega[flag]) / d_t
res[flag] = (va.unsqueeze(-1) * l_n[flag] + vb.unsqueeze(-1) * r_n[flag])
return res
def slerp_quat(l, r, t):
"""
slerp for unit quaternions
:param l: (*, 4) unit quaternion
:param r: (*, 4) unit quaternion
:param t: (*) scalar between 0 and 1
"""
t = t.expand(l.shape[:-1])
flag = (l * r).sum(dim=-1) >= 0
res = torch.empty_like(l)
res[flag] = slerp(l[flag], r[flag], t[flag])
flag = ~ flag
res[flag] = slerp(-l[flag], r[flag], t[flag])
return res
# def slerp_6d(l, r, t):
# l_q = repr6d2quat(l)
# r_q = repr6d2quat(r)
# res_q = slerp_quat(l_q, r_q, t)
# return quat2repr6d(res_q)
def interpolate_6d(input, size):
"""
:param input: (batch_size, n_channels, length)
:param size: required output size for temporal axis
:return:
"""
batch = input.shape[0]
length = input.shape[-1]
input = input.reshape((batch, -1, 6, length))
input = input.permute(0, 1, 3, 2) # (batch_size, n_joint, length, 6)
input_q = repr6d2quat(input)
idx = torch.tensor(list(range(size)), device=input_q.device, dtype=torch.float) / size * (length - 1)
idx_l = torch.floor(idx)
t = idx - idx_l
idx_l = idx_l.long()
idx_r = idx_l + 1
t = t.reshape((1, 1, -1))
res_q = slerp_quat(input_q[..., idx_l, :], input_q[..., idx_r, :], t)
res = quat2repr6d(res_q) # shape = (batch_size, n_joint, t, 6)
res = res.permute(0, 1, 3, 2)
res = res.reshape((batch, -1, size))
return res